Изобретение относится к автоматическому регулированию и может быть использовано для линейных динамических объектов периодического действия с априорно-неопределенными параметрами и запаздыванием по управлению.
Наиболее близким техническим решением к предлагаемому является система автоматического регулирования /Авторское свидетельство СССР №723510, кл. G05В 17/00, 1980/, содержащая измеритель рассогласования, усилитель, сглаживающий фильтр, сумматор, первый двухпозиционный переключатель, первый и второй идентичные блоки записи-воспроизведения информации, второй двухпозиционный переключатель, исполнительное устройство, объект регулирования, датчик обратной связи, программное устройство, на вход измерителя рассогласования поступает с программного устройства управляющее воздействие, изменение которого во времени в течение цикла строго повторяется от цикла к циклу. Образующаяся на выходе измерителя рассогласования разность текущего значения выходного параметра объекта регулирования и управляющего воздействия поступает на вход усилителя, а с выхода усилителя через сглаживающий фильтр - на один из выходов сумматора. Выходной сигнал сумматора подается на вход исполнительного устройства и одновременно, через двухпозиционный переключатель, на вход одного из блоков записи-воспроизведения информации, находящегося в режиме записи информации, на второй вход сумматора через первый двухпозиционный переключатель поступает выходной сигнал второго блока записи воспроизведения информации, находящегося в режиме воспроизведения информации.
Недостатком этой системы регулирования является то, что она работает только с устойчивыми, положительно определенными минимально-фазовыми объектами без запаздывания.
Задача изобретения - расширение функциональных возможностей системы, т.е. обеспечение возможности регулирования неустойчивыми априорно-неопределенными объектами с запаздыванием по управлению в периодических режимах.
Поставленная задача достигается тем, что в следящую систему, содержащую измеритель рассогласования, на вход которого поступает с программного устройства управляющее воздействие, изменение которого во времени в течение цикла строго повторяется от цикла к циклу, образующаяся на выходе измерителя рассогласования разность поступает на вход усилителя, а с выхода усилителя через сглаживающий фильтр - на первый вход первого сумматора, выход которого подключен к входу второго двухпозиционного переключателя, выходы которого подсоединены к входам блоков записи-воспроизведения информации, выходы блоков записи-воспроизведения информации связаны с входами первого двухпозиционного переключателя, выход которого подключен ко второму входу первого сумматора, выходы таймерного устройства подключены к управляющим входам двухпозиционных переключателей и блоков записи-воспроизведения информации, выход исполнительного устройства подсоединен к входу объекта регулирования, выход которого связан с входом датчика обратной связи, дополнительно введены второй сумматор, блок задержки на величину запаздывания объекта управления, третий сумматор, первый интегратор, блок задания коэффициентов, четвертый сумматор, первый умножитель, второй интегратор, второй умножитель, третий умножитель, третий интегратор, четвертый умножитель, при этом первый вход первого умножителя подключен к выходу датчика обратной связи, второй вход - к выходу измерителя рассогласования, а выход - к входу второго интегратора, выход интегратора подключен к первому входу второго умножителя, второй вход второго умножителя связан с выходом датчика обратной связи, а выход - со вторым входом второго сумматора, первый вход второго сумматора подключен к выходу первого сумматора, выход второго сумматора подключен к входу исполнительно устройства, к первому входу третьего сумматора и к входу блока задержки, выход третьего сумматора подключен к входу первого интегратора, выход первого интегратора связан со вторым входом четвертого сумматора и входом блока задания коэффициентов, выход блока задания коэффициентов подключен ко второму входу третьего сумматора, выход блока задержки связан с третьим входом третьего сумматора, с первым входом третьего умножителя и с первым входом четвертого умножителя, второй вход третьего умножителя соединен с выходом измерителя рассогласования, выход третьего умножителя - с входом третьего интегратора, выход которого подключен ко второму входу четвертого умножителя, выход четвертого умножителя связан с третьим входом второго сумматора, первый вход четвертого сумматора подключен к выходу датчика обратной связи, а выход четвертого сумматора связан со вторым входом измерителя рассогласования.
Вводя в систему второй, третий и четвертый сумматоры, блок задержки, первый интегратор и блок задания коэффициентов, мы осуществляем компенсацию запаздывания по управлению, а вводя в систему первый умножитель, второй умножитель, третий умножитель, четвертый умножитель, второй интегратор, третий интегратор, мы получаем настройку параметров, которая подается на вход исполнительного устройства. Эта настройка делает объект положительно определенным и устойчивым.
Объект управления описывается уравнением
 ,
,
где x ∈ Rn - вектор состояний объекта регулирования, L - матрица выхода, y ∈ R - выход объекта управления, u ∈ R - управление, удовлетворяющее уравнению
u(t)=-C(t)y(t)-k(t)u(t-τ).
Используя критерий гиперустойчивости В.М.Попова, можно показать, что реализуемый алгоритм настройки


где α>0 - число, β>0 - число, z(t) - выход дополнительного контура, динамика которого описывается уравнением
 ,
,
где а0>0 - число,
обеспечивает устойчивость системы.
На чертеже представлена блок-схема системы.
Система содержит измеритель рассогласования 1, усилитель 2, сглаживающий фильтр 3, первый сумматор 4, первый двухпозиционный переключатель 5, первый 6 и второй 7 идентичные блоки записи-воспроизведения информации, второй двухпозиционный переключатель 8, исполнительное устройство 9, таймерное устройство 10, объект регулирования 11, датчик обратной связи 12, программное устройство 13, второй сумматор 14, блок задержки 15, третий сумматор 16, первый интегратор 17, блок задания коэффициентов 18, четвертый сумматор 19, первый умножитель 20, второй интегратор 21, второй умножитель 22, третий умножитель 23, третий интегратор 24, четвертый умножитель 25.
Система функционирует следующим образом.
На первый вход измерителя рассогласования 1 поступает с программного устройства 13 управляющее воздействие, изменение которого во времени в течение цикла строго повторяется от цикла к циклу. Образующаяся на выходе измерителя рассогласования разность текущего значения выходного сигнала четвертого сумматора 19 и управляющего воздействия поступает на второй вход первого умножителя 20, на второй вход третьего умножителя 23 и на вход усилителя 2, а с выхода усилителя через сглаживающий фильтр 3 - на вход первого сумматора 4. На второй вход первого сумматора 4 через двухпозиционный переключатель 5 поступает выходной сигнал одного из блоков 6, 7 записи-воспроизведения информации, находящегося в режиме воспроизведения информации. Выходной сигнал первого сумматора 4 подается на первый вход второго сумматора 14 и на вход второго двухпозиционного переключателя 8, выходы которого подсоединены к одному из входов блоков 6, 7 записи-воспроизведения информации, находящегося в режиме записи информации, выходы блоков записи-воспроизведения информации связаны с входами первого двухпозиционного переключателя 5. Выходы таймерного устройства 10 подключены к управляющим входам двухпозиционных переключателей 5, 8 и блоков 6, 7 записи-воспроизведения информации. Выходной сигнал второго сумматора 14 подается на вход исполнительного устройства 9, на первый вход третьего сумматора 16 и на вход блока задержки 15. Выход исполнительного устройства 9 подключен к входу объекта регулирования 11, выход которого связан с входом датчика обратной связи 12, сигнал с выхода датчика обратной связи поступает на первый вход четвертого сумматора 19, на первый вход первого умножителя 20 и на второй вход второго умножителя 22, сигнал с выхода первого умножителя 20 поступает на вход второго интегратора 21, а с выхода второго интегратора - на первый вход второго умножителя 22, второй вход которого связан с выходом датчика обратной связи 12, полученный сигнал поступает с выхода второго умножителя 22 на второй вход второго сумматора 14. Сигнал с выхода блока задержки 15 поступает на первый вход третьего умножителя 23, на первый вход четвертого умножителя 25 и на третий вход третьего сумматора 16, выход третьего сумматора 16 подается на вход первого интегратора 17, а с выхода первого интегратора на второй вход четвертого сумматора 19 и на вход блока задания коэффициентов 18. Выход блока задания коэффициентов подключен ко второму входу третьего сумматора 16. Сигнал с выхода третьего умножителя 23 идет на вход третьего интегратора 24, с выхода третьего интегратора - на второй вход четвертого умножителя 25, а с выхода четвертого умножителя - на третий вход второго сумматора 14.
Технический результат изобретения заключается в возможности регулирования неустойчивым априорно-неопределенным объектом с запаздыванием по управлению в периодическом режиме с повторяющимся характером возмущений.
Данное устройство может быть реализовано промышленным способом на основе стандартной элементной базы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АПРИОРНО-НЕОПРЕДЕЛЕННЫХ ОБЪЕКТОВ | 2001 |
|
RU2205440C1 |
| СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 1999 |
|
RU2155983C1 |
| Система автоматического регулирования | 1975 |
|
SU723510A1 |
| Система автоматического управления циклическими процессами | 1983 |
|
SU1124247A1 |
| Система автоматического регулирования | 1983 |
|
SU1083158A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2062503C1 |
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ РАСХОДОВ ВОДЫ НА МАШИНЕ НЕПРЕРЫВНОЙ РАЗЛИВКИ МЕТАЛЛА | 2005 |
|
RU2302315C2 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЯМИ ПО СОСТОЯНИЮ И УПРАВЛЕНИЮ | 2002 |
|
RU2220433C2 |
Изобретение относится к системам автоматического управления и может быть использовано для линейных динамических объектов периодического действия с априорно-неопределенными параметрами и запаздыванием по управлению. Технический результат изобретения заключается в возможности регулирования неустойчивым априорно-неопределенным объектом с запаздыванием по управлению в периодическом режиме с повторяющимся характером возмущения. Он достигается тем, что система содержит измеритель рассогласования, усилитель, сглаживающий фильтр, два блока записи-воспроизведения информации, два двухпозиционных переключателя, четыре сумматора, программное устройство, исполнительное устройство, четыре умножителя, три интегратора, блок задания коэффициентов, блок задержки, датчик обратной связи, таймерное устройство, объект регулирования. 1 ил.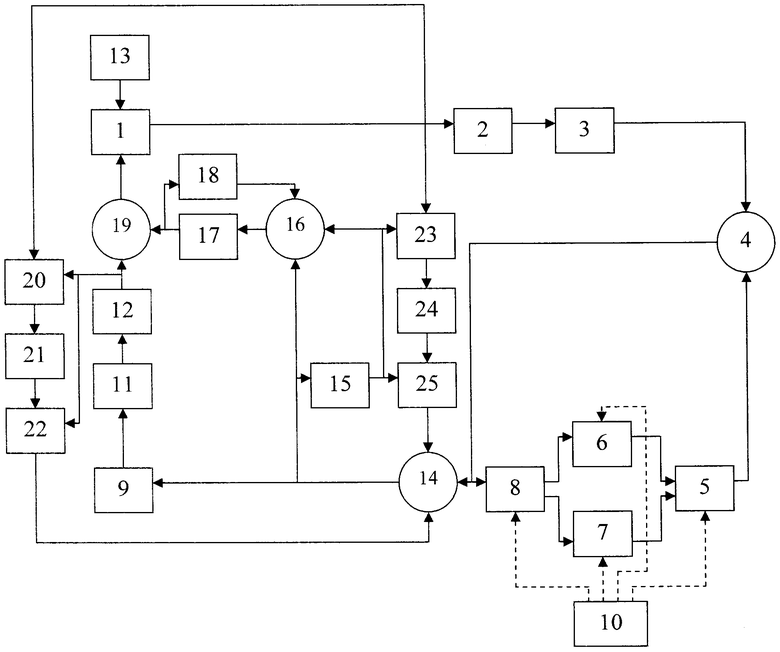
Следящая система управления для априорно-неопределенных объектов с запаздыванием по управлению, содержащая измеритель рассогласования, вход которого подключен к выходу программного устройства, а выход через усилитель подсоединен ко входу сглаживающего фильтра, выход сглаживающего фильтра соединен с первым входом первого сумматора, второй вход первого сумматора подключен к выходу первого двухпозиционного переключателя, выход первого сумматора подключен к входу второго двухпозиционного переключателя, выходы второго двухпозиционного переключателя подсоединены к входам блоков записи-воспроизведения информации, выходы блоков записи-воспроизведения информации связаны с входами первого переключателя, выходы таймерного устройства подключены к управляющим входам двухпозиционных переключателей и блоков записи-воспроизведения информации, выход исполнительного устройства соединен с входом объекта регулирования, выход которого подключен к входу датчика обратной связи, отличающаяся тем, что дополнительно введены второй сумматор, блок задержки на величину запаздывания объекта управления, третий сумматор, первый интегратор, блок задания коэффициентов, четвертый сумматор, первый умножитель, второй интегратор, второй умножитель, третий умножитель, третий интегратор, четвертый умножитель, при этом первый вход первого умножителя подключен к выходу датчика обратной связи, второй вход - к выходу измерителя рассогласования, а выход - ко входу второго интегратора, выход интегратора подключен к первому входу второго умножителя, второй вход второго умножителя связан с выходом датчика обратной связи, а выход - со вторым входом второго сумматора, первый вход второго сумматора подключен к выходу первого сумматора, выход второго сумматора подключен к входу исполнительного устройства, к первому входу третьего сумматора и ко входу блока задержки, выход третьего сумматора подключен ко входу первого интегратора, выход первого интегратора связан со вторым входом четвертого сумматора и входом блока задания коэффициентов, выход блока коэффициентов подключен ко второму входу третьего сумматора, выход блока задержки связан с третьим входом третьего сумматора, с первым входом третьего умножителя и с первым входом четвертого умножителя, второй вход третьего умножителя соединен с выходом измерителя рассогласования, выход третьего умножителя - с входом третьего интегратора, выход которого подключен ко второму входу четвертого умножителя, выход четвертого умножителя связан с третьим входом второго сумматора, первый вход четвертого сумматора подключен к выходу датчика обратной связи, а выход четвертого сумматора связан со вторым входом измерителя рассогласования.
| Система автоматического регулирования | 1975 |
|
SU723510A1 |
| СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 1999 |
|
RU2155983C1 |
| Система управления нестационарными объектами | 1984 |
|
SU1191883A1 |
| Механизм оттяжки кругловязальной машины | 1987 |
|
SU1481295A1 |

