Изобретение относится к области приборов, предназначенных для преобразования электромагнитного излучения в электрический сигнал, несущий информацию об изображении, при размещении этих приборов на подвижном основании. Примерами таких приборов могут служить, например, субмиллиметровые телескопы, теплопеленгаторы, тепловизоры, телекамеры, визуализаторы рентгеновского излучения. Как правило, в таких приборах используется одно- или многоэлементные приемники сигнала, а для получения изображения используется механическая развертка.
Известен способ стабилизации изображения, заключающийся в том, что на корпус оптико-электронного прибора устанавливают силовые гироскопы, которые при воздействии качек обеспечивают удержание прибора в установленном направлении за счет развиваемого ими гироскопического момента /1, стр. 95/. Недостатком этого способа является необходимость использования гироскопов с высоким кинетическим моментом, которые имеют большую массу и габариты.
Известен также способ стабилизации изображения, когда в нем выделяются неподвижные реперные точки, осуществляется их привязка к растру, в каждом полукадре определяется их положение и за счет сигнала смещения на отклоняющую систему, равного изменению положения реперных точек относительно первоначального, положение центра растра остается стабильным в пространстве /2, стр. 76-79/. Этот способ обладает следующими недостатками, во-первых, изображение должно быть типовым и располагаться на постоянном от оптико-электронного прибора расстоянии либо оптико-электронный прибор должен иметь систему регулирования фокусного рас стояния, которая обычно увеличивает массу прибора и ухудшает его оптические характеристики; во-вторых, для выделения реперных точек требуется достаточно сложная аппаратура для обработки видеосигнала; в-третьих, при достаточно большой амплитуде качек часть реперных точек может выйти за пределы растра, что может сорвать дальнейший процесс стабилизации.
Еще одним способом стабилизации изображения является описанный в /3/. В оптико-электронной системе по этой заявке перемещение измеряется с помощью акселерометра, а соответствующая коррекция изображения осуществляется за счет изменения порядка считывания элементов с ПЗС матрицы. Но эта система может быть применена лишь в приборах, где в качестве преобразователя излучения в электрический сигнал используются ПЗС приемники.
Более универсальным является способ, предложенный в /4/. В этом случае для стабилизации изображения используют переадресацию элементов изображения при записи текущего полукадра в запоминающее устройство. Изменение номера адреса пропорционально смещению оптико-электронного прибора. Недостатком такого способа стабилизации изображения является необходимость использования быстродействующего запоминающего устройства с большим объемом памяти, а также быстродействующих аналого-цифровых преобразователей для формирования текущего кода адреса записи в зависимости от смещения.
Наиболее близким к заявляемому техническому решению является способ стабилизации, описанный в /5/. При этом способе в оптическую систему оптико-электронного прибора устанавливают подвижный оптический элемент, позволяющий смещать формируемое изображение относительно преобразователя электромагнитного излучения в электрический сигнал. Перемещение подвижного оптического элемента осуществляют с помощью управляемого привода. Недостатком такого способа стабилизации изображения является то, что дополнительный подвижный оптический элемент вносит потери в прохождение потока излучения и тем самым ухудшает пороговую чувствительность оптико-электронного прибора, кроме того, наличие дополнительного привода усложняет конструкцию оптико-электронного прибора.
Известна оптико-электронная система /7, стр. 191/, содержащая сканирующее устройство, формирующую оптическую систему, приемник излучения, оптически связанные между собой. Сканирующее устройство обеспечивает развертку изображения по заданному генератором опорного сигнала закону. Работа генератора управляется синхроимпульсами, формируемыми синхронизатором. Такая система позволяет получить видеосигнал, несущий информацию об изображении в картинной плоскости, однако при размещении на подвижном носителе формируемое изображение из-за качек носителя будет перемещаться в растре, что затрудняет наблюдение.
Наиболее близким по числу совпадающих признаков авторами признан оптико-электронный прибор, описанный в /7, стр. 269, 270/. Этот оптико-электронный прибор состоит из формирующей оптической системы, оптически связанного с ней приемника излучения и блока механической развертки изображения. Блок механической развертки изображения содержит генератор опорного сигнала, выход которого соединен со входом сканирующего устройства. Сканирующее устройство кинематически связано с подвижным оптическим элементом формирующей оптической системы. О подходе подвижного оптического элемента к положению, соответствующему краю рабочего поля зрения, сигнализирует датчик синхронизации, выход которого соединен со входом синхронизатора (генератора синхроимпульсов), управляющего работой генератора опорного сигнала. Однако и этот прибор не обеспечивает стабилизацию изображения при размещении на подвижном носителе.
Задачей предлагаемого технического решения является улучшение пороговой чувствительности оптико-электронного прибора с оптико-механической разверткой изображения за счет как собственно стабилизации изображения, так и исключения из оптической формирующей системы дополнительных элементов. Дополнительным положительным эффектом является повышение надежности в результате неиспользования дополнительного привода.
Для решения задачи способ стабилизации изображения в оптико-электронном приборе с механической разверткой, заключающийся в смещении формируемого изображения на приемнике с помощью подвижного оптического элемента, модифицирован следующим образом: измеряют сигнал качек (перемещение оптико-электронного прибора), формируют величину возмущения от качки (пересчитывают измеренные перемещения) в направлении развертки, в качестве подвижного оптического элемента используют оптический элемент блока механической развертки, при этом осуществляют суммирование сигнала, пропорционального закону развертки в соответствующем канале, с составляющей перемещения по этому направлению развертки и подают суммарный сигнал на вход управления блоком развертки в соответствующем канале. Сигнал, корректирующий развертку, подают только в периоды прямого хода развертки.
Стабилизация изображения в предложенном способе осуществляется нижеописанным образом.
В качестве измеряющего датчика могут использоваться акселерометры, гироскопические датчики угла, датчики угловых скоростей, лазерные и волоконно-оптические гироскопы и т.п. В общем случае направление развертки оптико-электронного прибора может не совпадать с плоскостью, в которой осуществляется измерение перемещения. Так, например, гироскопические приборы, как правило, измеряют перемещение в абсолютной системе координат, а прибор может находиться в подвесе, ориентированном иначе, чем оси гироскопа. Кроме того, в оптико-электронном приборе может использоваться неортогональная, например, спиральная развертка. Для приведения в соответствие измеренных величин направлению развертки они должны быть пересчитаны на соответствующее направление. Зависимости, по которым может быть произведен пересчет, приведены, например, в /1, стр. 143/. В частном случае, например, когда используется ортогональная развертка и гироскопический датчик угла, закрепленный на оптико-электронном приборе таким образом, что направления измеряемых им перемещений совпадают с направлениями развертки, преобразование координат редуцируется к масштабированию. Просуммировав полученную поправку с сигналом развертки по соответствующему направлению, получают сигнал управления блоком сканирования. Под действием этого сигнала оптический элемент (линза, плоскопараллельная пластина, призма, зеркало, зеркальная призма и т.п.) осуществляет движение таким образом, что изображение проецируется в те точки растра, где бы оно находилось, если бы оптико-электронный прибор оставался неподвижным. В оптико-электронных приборах с механической разверткой обычно используется обратная связь по положению оптического элемента для сравнения с эталонным сигналом, чтобы сформировать синхроимпульсы, соответствующие положению конца рабочего хода (см., например, /6/). Однако в случае достаточно большого по уровню сигнала коррекции совпадение истинного и эталонного сигналов может наступить с большим опозданием или даже вообще не наступить на этапе прямого хода. Это может вызвать срыв синхронизации формируемого сигнала. Чтобы избежать этого, предлагается по окончании времени прямого хода прерывать подачу корректирующего сигнала, а использовать для управления блоком развертки во время обратного хода только сигнал требуемого закона развертки.
Рассмотренные выше различные варианты устройств, на базе которых мог бы быть реализован предложенный способ, не обеспечивают стабилизации изображения.
Для обеспечения стабилизации изображения без ухудшения оптических характеристик прибора и с минимальным снижением надежности в оптико-электронный прибор, содержащий формирующую оптическую систему, сканирующее устройство, кинематически связанное с подвижным оптическим элементом оптической системы, приемник излучения, оптически связанный с формирующей оптической системой, а также последовательно соединенные датчик синхронизации, синхронизатор и генератор опорного сигнала, причем вход датчика синхронизации связан с положением подвижного оптического элемента, введены сумматор и последовательно соединенные измеритель смещения, преобразователь координат и коммутатор, при этом второй выход синхронизатора соединен со входом управления коммутатора, первый вход сумматора подключен к выходу коммутатора, второй вход сумматора соединен с выходом генератора опорного сигнала, а выход сумматора соединен со входом сканирующего устройства.
С целью пояснения организации работы оптико-электронного прибора к описанию прилагается иллюстрация. На чертеже изображена функциональная схема предлагаемого оптико-электронного прибора с механической разверткой. В оптико-электронном приборе имеются оптически связанные формирующая оптическая система 1 и приемник излучения 2. Формирующая оптическая система 1 содержит подвижный оптический элемент, кинематически связанный со сканирующим устройством 3. Датчик синхронизации 4 кинематически или оптически связан с подвижным оптическим элементом. Выход датчика синхронизации 4 соединен со входом синхронизатора 5, последовательно которому установлены генератор опорного сигнала 6 и сумматор 7, выходом соединенный со входом сканирующего устройства 3. Второй выход синхронизатора 5 соединен со входом управления коммутатора 8, через контакты которого преобразователь координат 9 подключен к другому входу сумматора 7. Измеритель смещения 10 соединен со входом преобразователя координат 9.
Рассмотрим работу оптико-электронного прибора.
Поток электромагнитного излучения через формирующую оптическую систему 1 поступает на приемник излучения 2. Развертка изображения осуществляется сканирующей системой 3 за счет изменения положения подвижного оптического элемента формирующей оптической системы 1. В случае перемещения оптико-электронного прибора, например, при размещении его на подвижном носителе изображение также сместится. Чтобы обеспечить стабилизацию изображения определяется величина сдвига с помощью измерителя смещения. Так как направление развертки в общем случае не совпадает с направлениями, в которых осуществляет замер измеритель смещения, в преобразователе координат 9 сигнал смещения пересчитывается на направление развертки. Применение преобразователя координат позволяет также скомпенсировать нелинейные зависимости, связывающие, как правило, перемещение подвижного оптического элемента с положением мгновенного поля зрения (см. /7, стр. 192 - 200/). Через коммутатор 8 этот сигнал подается на вход сумматора 7, где складывается с сигналом требуемого закона развертки, формируемым генератором опорного сигнала 6. В результате сигнал с поправками на смещение поступает на вход сканирующего устройства 3. При этом перемещение подвижного оптического элемента отклоняется от идеального закона сканирования таким образом, что проекция мгновенного поля зрения оказывается в том же положении, что и до смещения оптико-электронного прибора. Таким образом обеспечивается стабилизация изображения в растре.
Рассмотрим теперь для простоты частный случай ортогональной развертки изображения, например, по кадру. Пусть она осуществляется сверху вниз и при положении подвижного оптического элемента, соответствующем нижнему краю рабочего поля, срабатывает датчик синхронизации 4 (например, электромеханический или фотоэлектрический). Он формирует соответствующий импульс и выдает его на синхронизатор 5, где момент его получения сравнивается с ожидаемым моментом прихода, формируемого, например, с помощью таймера, работающего от прецизионного генератора импульсов. Если ожидаемый и фактический моменты прихода импульсов с датчика синхронизации находятся в допустимых пределах, синхронизатор 5 формирует импульс запуска нового цикла работы генератора опорного сигнала 6. Пусть смещение оптико-электронного прибора произошло вверх, тогда, чтобы изображение осталось на том же месте, надо на соответствующую величину довернуть подвижный оптический элемент в направлении, противоположном направлению развертки. Но тогда по окончании времени рабочего хода подвижный оптический элемент не дойдет до крайнего положения и датчик синхронизации не сработает. Работа оптико-электронного прибора будет сорвана. Чтобы этого не произошло, синхронизатор 5 в конце прямого хода, определяемого по времени ожидаемого прихода импульса с датчика синхронизации, выдает со своего второго выхода команду на вход управления коммутатором 8. Коммутатор 8 отключает выход преобразователя координат 9 от входа сумматора 7. На вход сканирующего устройства 3 подается только сигнал требуемого закона развертки с генератора опорного сигнала 6 и таким образом обеспечивается возможность подвижному оптическому элементу дойти до положения, обеспечивающего срабатывание датчика синхронизации 4.
Из изложенного видно, что использование способа стабилизации изображения в оптико-электронной системе с механической разверткой, характеризующегося тем, что измеряют смещение оптико-электронного прибора, пересчитывают это смещение на направления развертки и вводят полученную поправку в сигнал идеального закона развертки изображения, преимущественно в течение прямого хода развертки, для изменения закона движения оптического элемента, осуществляющего развертку изображения, позволяет обеспечить стабилизацию изображения без существенного снижения надежности и увеличения аппаратурного состава оптико-электронного прибора.
Источники информации
1. Репников А.В., Сачков Г.П., Черноморский А.И. "Гироскопические системы", М., "Машиностроение", 1983. Аналог.
2. Петраков А.В. "Автоматические телевизионные комплексы для регистрации быстропротекающих процессов", М., "Энергоатомиздат, 1987. Аналог.
3. Заявка Великобритании N 2162019, НКИ H4F (МКИ H 04 N 5/21), 1986. Аналог.
4. А.С. СССР N 1592956, МКИ H 04 N 7/18, 1988. Аналог.
5. Патент США N 4731669, НКИ 358-229 (МКИ H 04 N 5/247, 5/225), 1988. Прототип.
6. Патент США N 4775731, НКИ 318-662 (МКИ G 05 B 1/06), 1988.
7. Госсорг Ж. "Инфракрасная термография. Основы, техника, применение". Пер. с франц., М., "Мир", 1988. Прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2000 |
|
RU2197070C2 |
| ОПТИКО-ЭЛЕКТРОННЫЙ ПЕЛЕНГАТОР | 2001 |
|
RU2197003C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2191407C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СЛЕДЯЩАЯ СИСТЕМА | 2000 |
|
RU2168753C1 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ | 2001 |
|
RU2212687C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2172010C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2003 |
|
RU2248009C2 |
| СЛЕДЯЩАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА | 2001 |
|
RU2211473C2 |
Изобретение относится к области приборов, предназначенных для преобразования электромагнитного излучения в электрический сигнал, несущий информацию об изображении, при размещении этих приборов на подвижном основании. Достигаемым техническим результатом является улучшение пороговой чувствительности и повышение надежности. Упомянутый способ стабилизации изображения характеризуется тем, что формируют величину возмущения от качки в направлении развертки в плоскости формирования изображения, полученный сигнал суммируют с сигналом закона развертки в течение прямого хода развертки, суммарный сигнал используют для управления блоком механической развертки в течение прямого хода, а в течение обратного хода для управления используют сигнал закона развертки. Оптико-электронный прибор содержит формирующую оптическую систему, сканирующее устройство, приемник излучения, датчик синхронизации, синхронизатор, генератор опорного сигнала, сумматор, измеритель смещения, преобразователь координат и коммутатор. 2 с.п.ф-лы, 1 ил.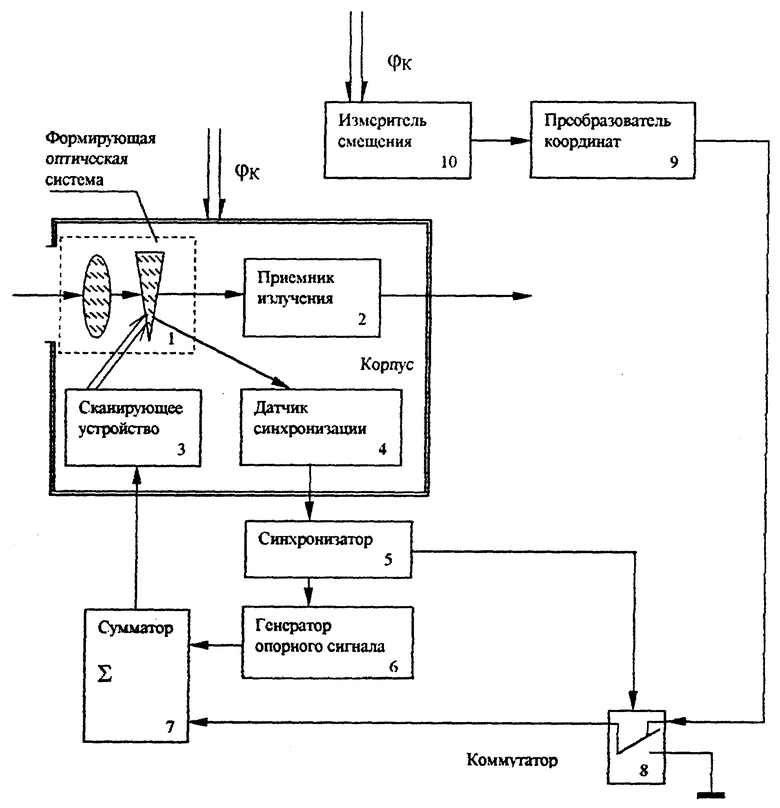
| US 4731669, 15.03.1988 | |||
| SU 1592956 A1, 15.09.1988 | |||
| ЗАДНИЙ СТОЛ ПРОШИВНОГО СТАНА | 1998 |
|
RU2162019C2 |
| US 4755731, 05.07.1988 | |||
| US 4524390, 18.06.1985. | |||

