Изобретение относится к области широкополосных сотовых систем радиосвязи, в частности может быть использовано в прямом канале по стандартам UMTS и cdma2000, для корректировки частоты опорного генератора, необходимой для когерентного приема сообщений, а также может использоваться при построении спутниковых систем связи, где возможно существование больших расстроек частоты.
В процессе работы системы широкополосной сотовой связи возможно рассогласование ΔF между несущей частотой принимаемого полезного сигнала и частотой опорного генератора мобильной станции. Это рассогласование (частотный сдвиг) может быть обусловлено доплеровским смещением частоты (из-за движения мобильной станции) и нестабильностью частоты опорных генераторов базовой и мобильной станций. В результате влияния расстройки частоты качество связи может существенно ухудшиться. Поэтому возникает проблема определения частоты (получения ее оценки) для дальнейшей корректировки частотного рассогласования ΔF.
Коррекцию частотного рассогласования можно проводить как с помощью кольца обратной связи, так и с помощью кольца "вперед", проводя коррекцию частоты в последующих относительно точки определения частоты трактах приемника. Выбор варианта построения схемы коррекции зависит от конкретных условий ее реализации и не рассматривается в рамках данного описания.
В любой системе связи после включения существует расстройка частоты ΔF, причем априорный интервал неопределенности частоты относительно истинного значения заранее известен и составляет [-Fmax, Fmax]. Для систем связи, организуемых в соответствии со стандартами UMTS и cdma2000, Fmax составляет 11 кГц. В результате работы устройства определения частоты требуется уменьшить априорный интервал неопределенности и определить частоту с точностью ± 150 Гц.
Наиболее часто используемыми являются фазовые методы определения частоты. Все они реализуют идею детектирования и фильтрации квазипостоянных фазовых изменений и использования полученной оценки изменений фазы для выработки сигнала оценки частоты. Дискриминационная характеристика цифрового фазового детектора является периодической и имеет пилообразную форму. Периодический характер дискриминационной характеристики является причиной возникновения захвата за ложную оценку частоты, если за счетный интервал времени произойдет сдвиг сигнала по фазе больше, чем на ± πn где n - кратность манипуляции при приеме фазоманипулированного сигнала. Для символов пилот-сигнала n = 1, т.к. они передаются всегда с одинаковой фазой; для символов передаваемой информации n = 4.
Принципиальные различия между всеми существующими фазовыми методами определения частоты состоят в реализации операции преобразования постоянного сдвига фазы в измеряемый параметр, однозначно связанный с существующим сдвигом частоты. Поскольку одной оценки фазы в условиях шумов и фединга сигнала обычно оказывается недостаточно, для определения частоты производят накопление и усреднение оценок. Длительность усреднения определяет точность формируемой оценки частоты и инерционность устройства определения частоты в целом. Функция преобразования полученного сигнала оценки фазы в оценку частоты обычно представляет собой зависимость измеряемого параметра от частоты и оптимизируется в соответствии с требованием минимальной сложности исполнения.
Одним из наиболее простых способов оценки постоянного сдвига фазы сложного фазоманипулированного сигнала является выделение фазового сдвига между двумя последовательно принятыми комплексными символами и последующее их усреднение [1. Дж. Спилкер. "Цифровая спутниковая связь". М., Связь. 1978 г, стр. 387- 404] . Эту операцию можно реализовать как перемножение комплексного отсчета принятого сигнала с комплексно-сопряженным предыдущим с последующей фильтрацией полученной комбинационной составляющей. Данный подход является частным случаем n-кратного умножения входного сигнала с последующей фильтрацией n*ωo составляющей. Здесь n - кратность манипуляции несущей, ωo - частота несущей.
Во временной области средняя частота сигнала может быть определена электронно-счетным частотомером путем подсчета числа положительных и отрицательных переходов сигнала через нулевой уровень за единицу времени [2. В. С. Первачев. "Радиоавтоматика". М" Сов.радио, 1982 г.]. Однако такая оценка средней частоты (через квазичастоту) всегда оказывается завышенной по отношению к среднему значению. Повышение точности оценки средней частоты возможно за счет применения алгоритма с использованием дробного дифференцирования сигнала во временной области, но в этом случае на порядок возрастает вычислительная сложность метода.
Известны способ и устройство для определения частоты в цифровой системе связи, описанные [3. Патент US # 4,938,906 "Frequency Estimation system", Jan.8, 1991]. Этот способ формирует оценку частоты с помощью линейной регрессии, анализируя отсчеты фазы. При этом формируется оптимальное по методу наименьших квадратов решение. Данные способ и устройство позволяют определять частоту с высокой точностью, но обладает недостатком, общим для всех цифровых фазовых методов определения частоты, поскольку имеет ограничение на максимальный сдвиг фазы между анализируемыми отсчетами.
В рассматриваемых системах связи для расширения спектра сигнала используется модуляция передаваемых данных ортогональными кодовыми последовательностями и кодирование скремблирующим кодом. В результате модуляции и кодирования комплексные символы преобразуются в последовательность закодированных комплексных чипов информации. При приеме, после переноса сигнала на нулевую частоту и оцифровки в АЦП, производят декодирование наложенных кодов и накопление (суммирование) декодированных чипов для получения переданного символа. Посредством декодирования и суммирования принимаемых чипов производится корреляционная обработка принятого сигнала. Отношение сигнал-шум для принимаемых чипов очень низкое, таким образом, получение достоверных оценок фазы сигнала возможно только после корреляционной обработки сигнала.
С другой стороны, как было отмечено выше, для всех цифровых фазовых способов оценки частоты существует ограничение на максимальный сдвиг фазы между отсчетами ±π/n, где n - кратность манипуляции при приеме фазоманипулированного сигнала. При больших значениях частоты фазовый сдвиг для принятых символов полезного сигнала будет превышать максимально допустимый, что не позволяет применять фазовые способы определения частоты во всем заданном априорном интервале неопределенности частоты [-Fmax, Fmax].
Известен способ и устройство определения частоты на основе частотного дискриминатора с использованием пары смежных по частоте фильтров. Основная идея, реализуемая при этом, состоит в нахождении центра тяжести энергетического спектра сигнала [4. У. Линдслей "Системы синхронизации в связи и в управлении". Сов. радио, 1979; 5. Automatic frequency control using split-band signal strength measurements: пат. США N 5487186, МКИ Н 04 В 1/16. Scarpa Carl G. ; Hitachi America, Ltd. - N 368747, заявл. 4.1.95, опубл. 23.1.96, НКИ 455.192.2].
Данное техническое решение позволяет определять частоту без декодирования наложенных расширяющих последовательностей (т.е. без корреляционной обработки сигнала). Принимаемый сигнал делится между двумя смежными по частоте фильтрами, занимающими по половине полосы пропускания, и выполняется сравнение уровней сигналов в каждой из этих полос. Разностный сигнал используется для формирования сигнала оценки частоты. [5. Automatic frequency control using split-band signal strength measurements: пат. США N 5487186, МКИ Н 04 В 1/16. Scarpa Carl G.; Hitachi America, Ltd. - N 368747: заявл. 4.1.95, опубл. 23.1.96, НКИ 455.192.2].
Недостатком этого подхода является необходимость построения двух фильтров высокого порядка и большого времени накопления для достижения достаточной точности оценивания.
Наиболее близким по технической сущности к предлагаемому способу определения частоты является способ и устройство, описанные в [6. В.И.Тихонов "Оптимальный прием сигналов". М., Радио и связь, 1983 г, стр. 199 рис. 3.13, стр. 230 рис. 3.21]. Этот способ основан на использовании многоканального приемника, состоящего из n параллельных каналов.
Такой способ определения частоты заключается в следующем:
выдвигают m гипотез о значении частоты, для чего делят априорный интервал значений частот [-Fmax, Fmax] на m частотных подинтервалов с частотный полосой F каждый;
для каждой из гипотез Fi, соответствующих серединам частотных подинтервалов, где i может принимать значения от 1 до m, вычисляют корреляцию сигнала за время Т, образуя m оценок корреляции;
определяют модули оценок корреляции;
выбирают гипотезу, с максимальным значением модуля оценки корреляции и вычисляют оценку частоты.
Для реализации описанного способа используют устройство, представленное на фиг. 1, которое содержит:
генератор опорного сигнала 1 - генератор комплексных отсчетов гетеродина для всех n каналов;
m параллельных частотных каналов, каждый из которых состоит из последовательно соединенных:
перемножителя 2 - комплексного перемножителя принятых чипов и комплексных отсчетов генератора опорного сигнала;
блока формирования оценки 3, который содержит сумматор 4 (комплексный сумматор принятых чипов) и узел определения модуля 5 (для вычисления модуля комплексного числа);
блока оценки частоты 6 - для сравнения полученных оценок корреляции и генерирования сигнала оценки частоты, блок оценки частоты содержит:
узел выбора максимума 7 - для определения номера канала с максимальным результатом накопления,
узел формирования оценки частоты 8 - для преобразования результата работы блока 7 в оценку частоты.
Работает устройство следующим образом.
После декодирования ортогональных и скремблирующих кодовых последовательностей чипы принятого сигнала поступают на n перемножителей 2, где каждый чип умножается на комплексный отсчет генератора опорного сигнала ejFit Fi - i-я гипотеза (центральная частота подинтервала), t - время. Таким образом, на выходе каждого из перемножителей формируется принятый сигнал со сдвигом по частоте, равным (Fi- Δ F).
В блоке формирования оценки 3 при помощи сумматора 4 производится когерентное накопление чипов информации за время Т. Таким образом, формируется m оценок корреляции, соответствующих гипотезам.
В узле 5 определяют модуль оценки корреляции, который передается на узел выбора максимума 7. В узле 7 выбирается максимальный результат накопления, по номеру соответствующего канала которого в узле 8 формируется оценка частоты, которая представляет собой значение частоты соответствующей гипотезы.
Однако использование параллельной схемы не представляется возможным из-за большой стоимости и габаритов устройства определения частоты, необходимых для достижения требуемой точности оценивания.
Задача, на решение которой направлена заявляемая группа изобретений, это:
определение частоты при большой априорной области неопределенности частоты [-Fmax, Fmax],
достижение высокой точности определения частоты даже при очень низком отношении сигнал-шум,
уменьшение стоимостно-габаритных характеристик устройства.
Для решения поставленной задачи предлагается способ определения частоты и два варианта устройства для его реализации.
В способ определения частоты, заключающийся в том, что на интервале неопределенности частоты выдвигают гипотезы о значении частоты, для каждой из гипотез вычисляют оценку корреляции сигнала за время Т, по полученным оценкам корреляции вычисляют оценку частоты, дополнительно вводят следующую последовательность новых операций:
определение частоты осуществляют последовательно за Q итераций,
определяют интервал неопределенности частоты для каждой итерации,
на каждой итерации уменьшают интервал неопределенности частоты для данной итерации до интервала неопределенности частоты для следующей итерации, а на последней итерации уменьшают интервал неопределенности частоты до требуемого значения, для чего на каждой итерации:
определяют время Т когерентного накопления оценок корреляции, как меньшее из двух величин, одна из которых равна величине, обратно пропорциональной интервалу неопределенности частоты на данной итерации, а другая равна интервалу стационарности канала,
выдвигают n гипотез, где n > 1, о значении частоты на интервале частоты,
для каждой гипотезы вычисляют k оценок корреляции, выполняемых на непересекающихся временных интервалах длительностью Т, где k определяется величиной интервала неопределенности частоты на следующей итерации, k соответствующих оценок корреляции используют для получения обобщенной оценки корреляции для каждой из гипотез,
формируют опорную сигнальную функцию,
определяют координату центра опорной сигнальной функции по ее максимальному приближению к обобщенным оценкам корреляции всех n гипотез,
определяют частоту, равную координате центра опорной сигнальной функции,
для получения обобщенной оценки корреляции каждой из гипотез накапливают квадраты модулей соответствующих оценок корреляции,
в качестве опорной сигнальной функции S(f) используют функцию вида (Sin(x)/(x))2, где x = πfT, либо криволинейную или полиномиальную регрессионную функцию, максимальное приближение опорной сигнальной функции к обобщенным оценкам корреляции гипотез определяют путем минимизации суммы квадратов отклонений опорной сигнальной функции от обобщенных оценок корреляции гипотез.
В устройство определения частоты по первому варианту, содержащее одинаковые параллельные каналы приема сигнала, каждый канал состоит из последовательно соединенных перемножителя и блока формирования оценки, который содержит первый сумматор, первые входы перемножителей параллельных каналов приема объединены и являются информационным входом устройства, вторые их входы соединены с выходами генератора опорного сигнала, выходы блоков формирования оценки соединены с соответствующими им входами блока оценки частоты, содержащим последовательно соединенные узел выбора максимума и узел формирования оценки частоты, выход которого является выходом блока оценки частоты и образует выход устройства, дополнительно вводят следующие отличительные признаки:
введен блок управления,
дополнительно введены в блок формирования оценки каждого параллельного канала приема сигнала узел вычисления квадрата модуля, вход которого соединен с выходом первого сумматора, а выход - со входом второго сумматора, формирующего обобщенную оценку корреляции гипотезы соответствующего канала приема сигнала,
дополнительно введены в блок оценки частоты узел определения зоны сканирования, узел генерирования отсчетов опорной сигнальной функции, последовательно соединенные узел вычисления квадрата отсчета и первый сумматор и последовательно соединенные перемножитель, второй сумматор, узел вычисления квадрата числа и делитель, второй вход которого соединен с выходом первого сумматора, а выход делителя соединен со входом узла выбора максимума, входы узла определения зоны сканирования и первые входы перемножителя объединены и соединены с выходами вторых сумматоров блоков формирования оценки, выход узла определения зоны сканирования соединен с первым входом узла генерирования отсчетов опорной сигнальной функции, первый выход которого соединен со вторым входом перемножителя и входом узла вычисления квадрата отсчета, а второй его выход соединен со вторым входом узла формирования оценки частоты,
выход блока оценки частоты соединен со входом блока управления,
первый управляющий выход блока управления, устанавливающий значения частот, соответствующих гипотезам, соединен со входом генератора опорного сигнала и вторым входом узла генерирования отсчетов опорной сигнальной функции,
второй управляющий выход блока управления, устанавливающий время когерентного накопления, соединен со вторым входом первого сумматора в каждом блоке формирования оценки и третьим входом узла генерирования отсчетов опорной сигнальной функции,
третий управляющий выход блока управления, определяющий количество k оценок корреляции, соединен со вторым входом второго сумматора в каждом блоке формирования оценки,
четвертый управляющий выход блока управления, устанавливающий требуемую точность оценки частоты, соединен с четвертым входом узла генерирования отсчетов опорной сигнальной функции.
В устройство определения частоты по второму варианту, содержащее одинаковые параллельные каналы приема сигнала, каждый канал состоит из последовательно соединенных перемножителя и блока формирования оценки, который содержит первый сумматор, первые входы перемножителей параллельных каналов приема объединены и являются информационным входом устройства, вторые их входы соединены с выходами генератора опорного сигнала, выходы блоков формирования оценки соединены с соответствующими им входами блока оценки частоты, содержащим узел формирования оценки частоты, выход которого является выходом блока оценки частоты и образует выход устройства, дополнительно вводят следующие отличительные признаки:
введен блок управления,
дополнительно введены в блок формирования оценки каждого параллельного канала приема сигнала узел вычисления квадрата модуля, вход которого соединен с выходом первого сумматора, а выход - со входом второго сумматора, формирующего обобщенную оценку корреляции гипотезы соответствующего канала приема сигнала,
дополнительно введены в блок оценки частоты последовательно соединенные узел определения параметров регрессионной функции и узел вычисления центра регрессионной функции, выход которого соединен со входом узла формирования оценки частоты, а первые входы узла определения параметров регрессионной функции соединены с выходами вторых сумматоров блоков формирования оценки,
выход блока оценки частоты соединен со входом блока управления,
первый управляющий выход блока управления, устанавливающий значения частот, соответствующих гипотезам, соединен со входом генератора опорного сигнала, вторым входом узла определения параметров регрессионной функции, вторым входом узла вычисления центра регрессионной функции и вторым входом узла формирования оценки частоты,
второй управляющий выход блока управления, устанавливающий время когерентного накопления Т, соединен со вторым входом первого сумматора в каждом блоке формирования оценки и третьим входом узла определения параметров регрессионной функции,
третий управляющий выход блока управления, определяющий количество k оценок корреляции, соединен со вторым входом второго сумматора в каждом блоке формирования оценки,
четвертый управляющий выход блока управления, устанавливающий требуемую точность оценки частоты, соединен с третьим входом узла формирования оценки частоты и третьим входом узла вычисления центра регрессионной функции.
И в первом, и во втором вариантах реализации устройства формируют n одинаковых параллельных каналов приема, где m > n > 1.
Сравнение заявляемого способа определения частоты с прототипом показывает, что заявляемое изобретение отличается наличием новых признаков способа.
В предлагаемом способе определение частоты осуществляют последовательно за Q итераций, поэтапно сужая априорную область неопределенности частоты до достижения требуемой точности оценивания. Такой подход позволяет использовать на каждой итерации меньшее количество параллельных частотных каналов приема сигнала относительно прототипа. Необходимая точность определения частоты достигается за счет использования опорной сигнальной функции, позволяющей восстановить информацию о возможном значении частоты на частотных интервалах между выдвинутыми гипотезами.
Кроме того, обобщенные оценки корреляции для каждой из гипотез на всех итерациях формируются на основании k соответствующих оценок корреляции, что позволяет получать оценку частоты с высокой точностью даже при очень низком отношении сигнал-шум. Следовательно, заявляемый способ обладает новизной.
Сравнение заявляемого способа определения частоты с другими известными решениями в данной области техники не позволило выявить признаки, заявленные в отличительной части формулы изобретения, следовательно, предлагаемое изобретение также отвечает критериям изобретения: "новизна", "техническое решение задачи", "существенные отличия" и обладает неочевидностью.
Сравнение заявляемых устройств определения частоты по первому и второму вариантам с прототипом показывает, что предлагаемое устройство отличается наличием новых блоков и элементов схемы, а также наличием принципиально новых связей в блок-схеме, которые позволяют реализовать новые признаки заявляемого способа. Отличием вариантов исполнения устройств является различное выполнение блока оценки. Однако и первый, и второй варианты способа позволяют в полной мере реализовать все признаки заявленного способа и получить эквивалентный эффект. Следовательно, заявляемое устройство определения частоты (варианты) обладает новизной.
Сравнение заявляемого устройства определения частоты (варианты) с другими известными решениями в данной области техники не позволило выявить признаки, заявленные в отличительной части формулы изобретения, следовательно, предлагаемое изобретение также отвечает критериям изобретения: "новизна", "техническое решение задачи", "существенные отличия" и обладает неочевидностью.
Графические материалы, поясняющие предлагаемое изобретение:
Фиг. 1 - блок-схема устройства прототипа.
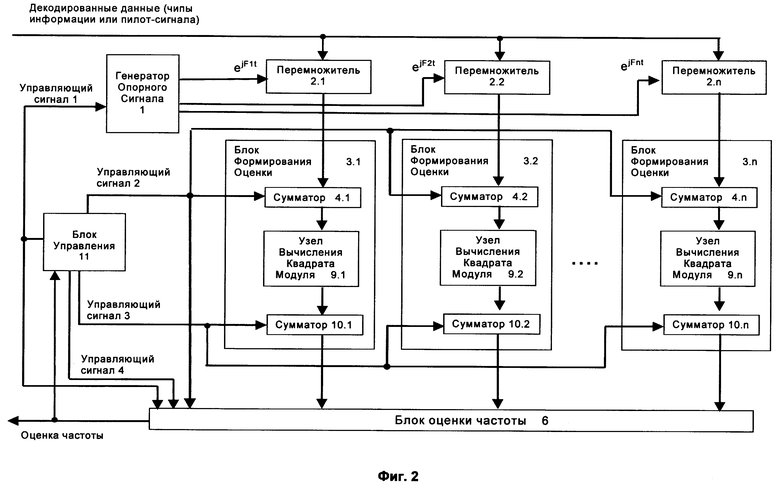
Фиг. 2 - блок-схема предлагаемого устройства определения частоты, которая является одинаковой для заявляемого устройства по первому и второму вариантам реализации, различие выполнения вариантов состоит в структуре блока оценки частоты 8.
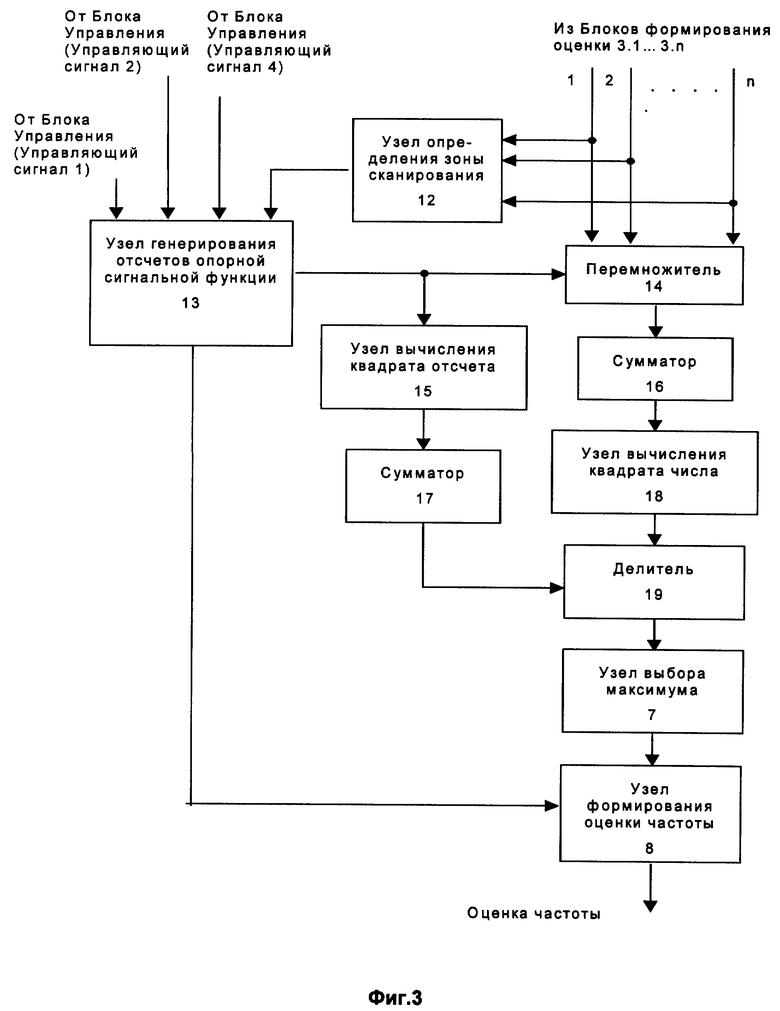
Фиг. 3 - схема блока оценки частоты для заявляемого устройства определения частоты по первому варианту.
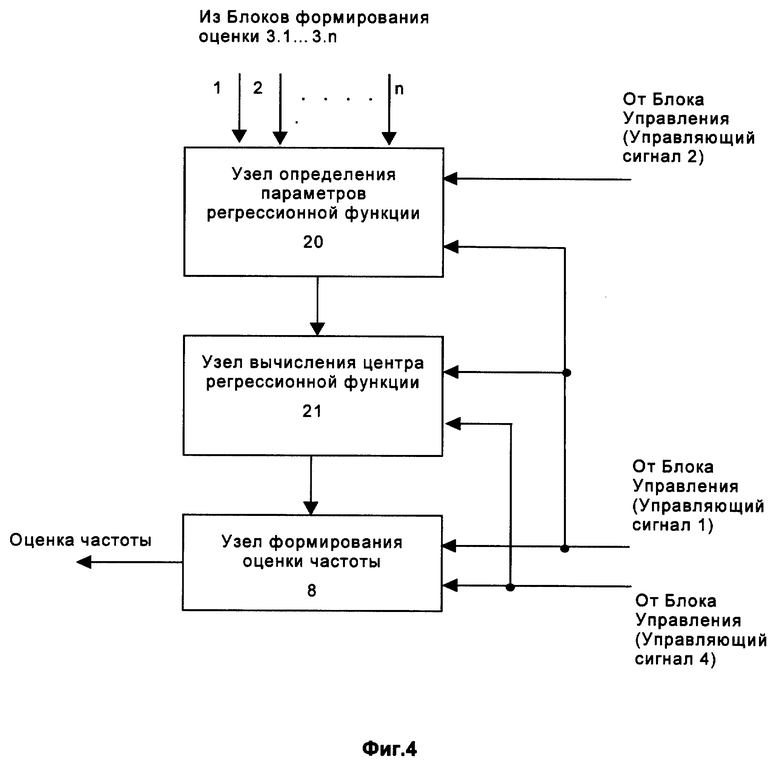
Фиг. 4 - схема блока оценки частоты для заявляемого устройства определения частоты по второму варианту.
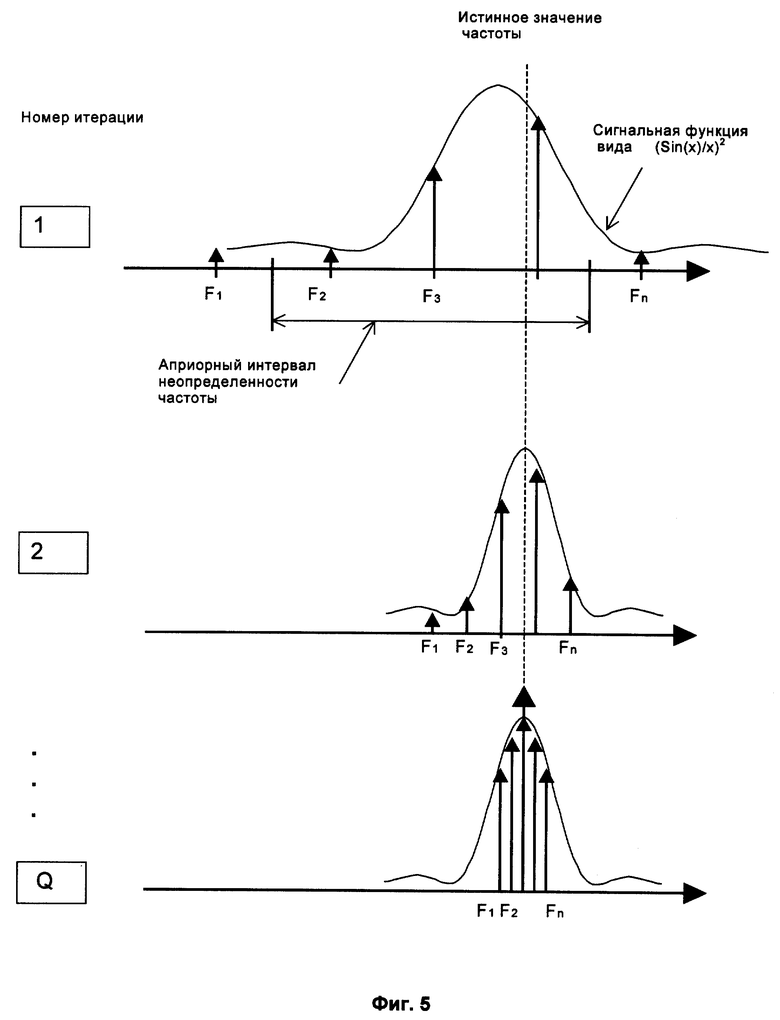
Фиг. 5 иллюстрирует принцип заявляемого способа определения частоты.
Заявляемое устройство определения частоты (фиг. 2) содержит:
генератор опорного сигнала 1 - генератор комплексных отсчетов гетеродина для всех n гипотез;
n параллельных частотных каналов, каждый из которых настроен на частоту, соответствующую одной из гипотез, каждый из n каналов состоит из последовательно соединенных:
перемножителя 2 - комплексного перемножителя принятых чипов и комплексных отсчетов генератора опорного сигнала;
блока формирования оценки 3 (для формирования обобщенной оценки корреляции M(Fi) для данной гипотезы); блок 3 содержит:
первый сумматор 4 (комплексный сумматор принятых чипов),
узел вычисления квадрата модуля 9 (для вычисления квадрата модуля комплексного числа);
второй сумматор 10 (сумматор некогерентного накопления k оценок корреляции);
блок оценки частоты 6 - блок регрессионного анализа полученных обобщенных оценок корреляции M(Fi) и формирования сигнала оценки частоты;
блок управления 11.
Блок оценки частоты 6 для заявляемого устройства определения частоты по первому варианту (фиг. 3) содержит:
Узел определения зоны сканирования 12,
Узел генерирования отсчетов опорной сигнальной функции 13,
Перемножитель 14,
Узел вычисления квадрата отсчета 15,
Первый сумматор 17,
Второй сумматор 16,
Узел вычисления квадрата числа 18,
Делитель 19,
Узел выбора максимума 7,
Узел формирования оценки частоты 8.
Блок оценки частоты 6 для заявляемого устройства определения частоты по второму варианту (фиг. 4) содержит:
Узел определения параметров регрессионной функции 20,
Узел вычисления центра регресионной функции 21,
Узел формирования оценки частоты 8.
Предлагаемый квазиоптимальный алгоритм представляет собой модифицированную многоканальную схему, основанную на оптимальных решающих функциях.
Заявляемый способ реализуется путем последовательной пошаговой процедуры с регрессионной оценкой частоты по результатам параллельного многоканального приема. Регрессионный анализ результатов параллельного многоканального приема используется и в первом, и во втором вариантах устройства. Различие состоит в том, что в первом варианте устройства используется опорная сигнальная функция известного вида с неопределенным местоположением на частотной оси, а во втором варианте устройства как частотное местоположение, так и вид сигнальной функции в общем случае являются неизвестными и определяются в процессе анализа.
Заявляемый способ определения частоты реализуют следующим образом.
Определение частоты осуществляют последовательно за Q итераций.
Определяют интервал неопределенности частоты для каждой итерации, при этом на каждой итерации уменьшают интервал неопределенности частоты для данной итерации до интервала неопределенности частоты для следующей итерации, а на последней итерации уменьшают интервал неопределенности частоты до требуемого значения. Отметим, что количество итераций, количество гипотез на каждой итерации и требования к точности оценки частоты по окончании каждой из них выбираются в процессе проектирования конкретного устройства и оптимизируются исходя из требований к объему устройства оценки частоты и необходимому быстродействию.
На каждой итерации определяют время Т когерентного накопления оценок корреляции как меньшее из двух величин, одна из которых равна, например, величине, обратной половине интервала неопределенности частоты на данной итерации, а другая равна интервалу стационарности канала.
Далее на каждой итерации выдвигают n гипотез, где n > 1, о значении частоты на интервале частоты, например, отличающемся от интервала неопределенности частоты в α раз, где α < 2. После этого вычисляют k оценок корреляции для каждой гипотезы, выполняемых на непересекающихся временных интервалах длительностью Т. Величина k определяет время формирования обобщенных оценок корреляции и зависит от величины интервала неопределенности частоты на следующей итерации. Изменение времени формирования обобщенных оценок корреляции позволяет добиваться необходимой вероятности уменьшения интервала неопределенности частоты для данной итерации до требуемого значения.
Для получения обобщенной оценки корреляции каждой из гипотез используют k соответствующих оценок корреляции, например, путем накопления их квадратов модулей.
Формируют опорную сигнальную функцию и определяют частоту, равную координате центра опорной сигнальной функции, по максимальному приближению опорной сигнальной функции к обобщенным оценкам корреляции всех n гипотез.
В качестве опорной сигнальной функции может использоваться функция вида (Sin(x)/(x))2, где x = πfT, координату центра которой находят путем минимизации суммы квадратов отклонений опорной сигнальной функции от обобщенных оценок корреляции гипотез. Другим вариантом опорной сигнальной функции может являться любая другая криволинейная или полиномиальная регрессионная функция, дающая хорошее приближение к истинной форме центрального лепестка сигнальной функции принимаемого сигнала.
При реализации способа определения частоты в устройстве по первому варианту используется структура блока 6, представленная на фиг. 3, а фиг. 5 иллюстрирует принцип последовательной регрессионной оценки частоты по результатам параллельного многоканального приема.
На первом шаге анализируется весь априорный интервал неопределенности частоты [-Fmax, Fmax]. Для этого выбирают время когерентного накопления оценок Т как меньшее из двух величин, одна из которых равна, например, величине, обратной половине интервала неопределенности частоты на данной итерации, а другая равна интервалу стационарности канала, и выдвигают n гипотез о значении частоты. Гипотезы выдвигаются на интервале частот, в общем случае не равном интервалу неопределенности частоты для данной итерации.
Для каждой из гипотез вычисляют обобщенную оценку корреляции, для чего параллельно формируют n величин, соответствующих гипотезам, используя следующую функцию:
где i - номер гипотезы, принимающий значения от 1 до n,
Fi - частота, соответствующая i-ой гипотезе,
M(Fi) - обобщенная оценка корреляции для каждой из i гипотез (результат накопления квадрата модулей k оценок корреляции),
k - количество накапливаемых оценок корреляции,
Xi,b ReXi,b Im - реальная и мнимая части когерентного накопления принятых чипов в соответствии с i-ой гипотезой для b-ой оценки корреляции.
Далее определяют зону сканирования, ограниченную частотами F1 и F2. Эту операцию можно проводить, например, путем выбора двух гипотез, имеющих наибольшее значение (1) и определения их частот. Выбор двух наибольших результатов накопления позволяет уменьшить вычислительную сложность метода, поскольку искомое значение частоты будет располагаться в интервале частот, ограниченном частотами данных гипотез.
Для определения частоты находят максимум следующей решающей функции, основанной на методе наименьших квадратов (максимума правдоподобия):
где Sinc[.] - функция вида Sin(x)/(x),
τ - переменная, принимающая значения от F1 до F2.
Величина τ, при которой выполняется условие максимума (2), и будет являться искомой оценкой частоты. Определение оценки частоты можно производить как путем последовательного приращения τ и нахождения максимального значения Ω(τ), так и с использованием параллельной схемы, каждый из выходов которой соответствует своему значению τ. Выбор дискретности приращения переменной τ зависит от величины интервала неопределенности частоты по окончании данной итерации и может быть определен как величина примерно равная четверти этого интервала.
На следующем шаге снова производят выбор времени когерентного накопления оценок T в соответствии с описанным выше правилом в окрестности полученной оценки частоты с учетом определенного для данной итерации интервала неопределенности формируют n гипотез и выполняют очередную итерацию определения частоты, уточняя полученную на предыдущей итерации оценку.
Проведя Q таких итераций, априорный интервал неопределенности частоты [-Fmax, Fmax] сужается до размеров, удовлетворяющих заданной допустимой погрешности оценивания.
Как было отмечено выше, существуют два общих принципа использования полученной оценки частоты для коррекции частотного рассогласования. При использовании кольца обратной связи по окончании каждого шага оценивания полученное значение оценки частоты передается в устройство коррекции, например в опорный генератор аналогового демодулятора для его сложнения с текущим значением частоты генератора. В этом случае не требуется при формировании гипотез учитывать полученную на предыдущей итерации оценку частоты, поскольку она будет учитываться автоматически.
Принцип действия способа определения частоты основан на том, что вид сигнальной функции принимаемого сигнала априори известен и зависит только от длительности когерентного накопления сигнала. Выбор длительности когерентного накопления сигнала необходимо производить с учетом интервала ортогональности принимаемого сигнала.
Особенностью стандарта UMTS является временное разделение пилот-символов и символов информации. Если интервал стационарности канала больше интервала ортогональности, то для символов пилот-сигнала, передаваемых всегда с одинаковой фазой, можно проводить когерентное накопление нескольких символов.
Между тем фаза принимаемых символов информации априори не определена, поскольку для передачи информации используется 4-фазная манипуляция сигнала. Таким образом, при приеме символов информации длительность когерентного накопления не может превышать длительности символа, что в большинстве случаев является ограничением для их использования.
Несмотря на существующие ограничения на использование символов информации предлагаемый алгоритм определения частоты позволяет формировать оценку частоты используя только символы пилот-сигнала, обеспечивая при этом требуемую точность определения частоты за время, не значительно превышающее время анализа в устройстве-прототипе.
В стандарте cdma2000 существует постоянно передаваемый пилот-сигнал, что позволяет получать оценки корреляции на смежных временных интервалах. При этом временные характеристики предлагаемого устройства значительно превосходят аналогичные показатели устройства-прототипа.
Работает заявляемое устройство по первому варианту следующим образом (фиг. 2, фиг. 3).
В начале каждой из Q итераций блок управления 11 при помощи 4-х управляющих сигналов передает во все блоки устройства определения частоты необходимые данные, соответствующие номеру итерации.
При помощи управляющего сигнала 1 в генератор опорного сигнала 1 и в узел генерирования отсчетов опорной сигнальной функции 13 передают частоты Fi. Управляющий сигнал 2 предназначен для передачи значения параметра Т (время когерентного накопления сигнала) в сумматор 4 и в узел 13. Управляющий сигнал 3 определяет время некогерентного накопления оценок корреляции (количество оценок k) в сумматоре 10. Управляющий сигнал 4 позволяет задавать дискретность изменения переменной τ в узле 13.
Чипы принятого сигнала после декодирования ортогональных и скремблирующих кодовых последовательностей поступают на n комплексных перемножителей 2, где каждый чип умножается на комплексный отсчет генератора опорного сигнала ejFit, Fi - частота i-ой гипотезы, t - время. Таким образом, на выходе каждого из перемножителей формируется принятый сигнал, сдвинутый по частоте на величину (Fi - ΔF).
В блоке 3 производится формирование оценки M(Fi) для данной гипотезы в соответствии с функцией (1). Для этого при помощи сумматора 4 производится когерентное накопление чипов информации за время Т. После этого в узле 9 вычисляют квадрат модуля накопленной когерентной суммы (квадрат оценки корреляции).
Сумматор 10 предназначен для некогерентного накопления k квадратов оценок корреляции и формирования, таким образом, значения обобщенной оценки корреляции M(Fi) для данной гипотезы.
Блок оценки частоты 6 (фиг. 3) по полученным значениям функции M(Fi) производит определение частоты, используя решающую функцию (2).
Узел определения зоны сканирования 12, реализуемый в данном случае как узел выбора двух максимумов, выбирает два частотных канала с максимальным значением M(Fi) и определяет их номера, которые передаются в узел 13, где определяются их частоты: F1 и F2. Затем в узле 13 производится генерирование отсчетов регрессионной функции вида (Sin(x)/(x))2, где x = π(Fi-τ)T, при этом переменная τ изменяется в диапазоне от F1 до F2 с дискретностью, заданной управляющим сигналом 4 из блока управления 11.
Отсчеты регрессионной функции из узла 13 поступают на перемножитель 14, где производится их перемножение с соответствующими отсчетами М(Fi). Результат умножения передается в сумматор 16 для их суммирования для каждого значения τ по всем n каналам. Полученные суммы передаются в узел вычисления квадрата числа 18. Совместная работа узлов 14, 16 и 18 позволяет сформировать числитель выражения (2).
Узел вычисления квадрата отсчета 15 предназначен для получения отсчетов (Sin(x)/(x))4. Совместная работа узла 15 и сумматора 17 позволяет сформировать знаменатель выражения (2).
На выходе делителя 19 формируется решающая функция Ω(τ), отсчеты которой передаются в узел 7 для нахождения максимального значения. Для формирования оценки частоты в узел 8 из узла 13 передается информация о диапазоне и дискретности изменения τ. Сопоставление этой информации с найденным в узле 7 максимумом функции Ω(τ) позволяет принять решение о значении частоты и выдать ее оценку на выход узла 8, образующий выход блока 6.
Полученная оценка частоты передается в блок управления 11 для ее использования при формировании частот Fi на следующей итерации.
В установившемся режиме устройство определения частоты работает непрерывно, осуществляя одинаковые циклы (итерации) оценки частоты. Для организации режима слежения при помощи предлагаемой структуры необходимо повторять последний (самый точный) шаг оценки частоты. Отметим, что на последней итерации ширина центрального лепестка сигнальной функции может быть выбрана достаточно большой, что позволяет использовать данный метод для создания систем автоподстройки частоты с широкой полосой удержания.
При использовании способа 2 оценки частоты заявляемый способ реализуют, используя блок 6, блок-схема которого изображена на фиг. 4.
Использование регрессионной функции вида (Sin(x)/(x))2 (частный случай криволинейной регрессии) позволяет получать наилучшую оценку сдвига частоты, поскольку в этом случае используется истинная сигнальная функция принимаемого сообщения. Вместе с тем, предлагаемый способ позволяет проводить оценку частоты с использованием ряда других криволинейных или полиномиальных регрессионных функций, дающих хорошее приближение к истинной форме центрального лепестка сигнальной функции.
При реализации способа определения частоты в устройстве по второму варианту используется структура блока 6, представленная на фиг. 4.
Предлагаемое устройство также предполагает выполнение Q итераций для определения частоты. Работает устройство следующим образом.
На первом шаге анализируется весь априорный интервал неопределенности частоты [-Fmax, Fmax] . Для этого выбирают время когерентного накопления оценок Т в соответствии с описанным выше правилом и выдвигают n гипотез о значении частоты на интервале частот, в общем случае не равном интервалу неопределенности частоты для данной итерации.
Для каждой из гипотез с помощью блоков 1, 2, 3 и 11 вычисляют обобщенную оценку корреляции, для чего параллельно формируют n величин, соответствующих гипотезам, используя выражение (1). Работа блоков 1, 2, 3 и 11 при реализации способа определения частоты на устройстве по второму варианту на каждой из Q итераций аналогична описанной выше реализации способа на устройстве по первому варианту. В результате их работы также будут сформированы обобщенные оценки корреляции для каждой из n гипотез.
После накопления в сумматоре 10 (фиг. 2) k квадратов оценок корреляции и формирования, таким образом, значения функции M(Fi) для каждой из n гипотез оценки корреляции M(Fi) из блоков 3 поступают в узел определения параметров регрессионной функции 20.
В узле 20 определяют параметры регрессионной функции S(f) по обобщенным оценкам корреляции, полученным для каждой из n гипотез таким образом, чтобы обеспечить максимальное ее приближение к этим оценкам.
В зависимости от вида регрессионной функции и способа определения близости регрессионной функции к имеющимся обобщенным оценкам корреляции возможны различные алгоритмы определения ее параметров. Рассмотрим два основных подхода к определению параметров регрессионной функции.
Аналитический подход заключается в получении точных аналитических выражений расчета каждого параметра. Пусть, например, регрессионная функция представляет собой полином:
где x - аргумент полинома,
ab - коэффициенты (параметры) полинома,
М - порядок полинома.
Рассмотрим определение параметров регрессионной функции по методу наименьших квадратов, при котором параметры регрессионной функции выбирают таким образом, чтобы сумма квадратов разности обобщенных оценок корреляции и значений регрессионной функции в соответствующие моменты времени была минимальной. Пусть M(Fi) - i-я обобщенная оценка корреляции, a Fi - ее координата на частотной оси. Тогда необходимо определить параметры регрессионного полинома, при которых выполняется условие минимума выражения:
Для нахождения параметров регрессионной функции, минимизирующих выражение (4), нужно вычислить частные производные выражения (4) по каждому параметру и приравнять их к нулю. Дифференцирование выражения (4) приводит к системе линейных уравнений, решения которых легко определяются аналитически.
Выражение (4) для общего вида регрессионной функции имеет вид:
где θi - i-й параметр регрессионной функции.
Отметим, что аналитическое определение параметров возможно не для всех видов регрессионных функций. В отличие от выражения (4) дифференцирование выражения (5) может приводить к системе нелинейных уравнений, получение точных решений которой часто бывает невозможным или требует существенных аппаратных затрат. Характерным примером может служить использование функции (Sin(x)/(x))2.
Для определения параметров регрессионной функции в этом случае можно применять численные методы [7. А.А. Амосов, Ю.А. Дубинский и Н.В. Копченова. Вычислительные методы для инженеров. М., "Высшая школа", 1994, стр.262-263; 8. Математическая энциклопедия под ред. И.М. Виноградова М., "Советская энциклопедия", 1982].
После определения значений параметров регрессионной функции в узле 21 производится вычисление ее центра. Для этого можно использовать процедуру, аналогичную процедуре нахождения максимального значения выражения (2). Эта процедура основана на вычислении значения функции при разных значениях переменной с последующим сравнением полученных результатов. Управляющий сигнал 1 из блока управления 11 позволяет определить область поиска центра регрессионной функции. При этом, как и ранее, выбор дискретности изменения переменной зависит от величины интервала неопределенности частоты по окончании данной итерации.
Другим вариантом вычисления центра регрессионной функции может быть определение местоположения экстремумов регрессионной функции S(f) на частотной оси, однозначно связанных с искомым значением центра регрессионной функции.
В узле 8 формируют оценку частоты, для чего используется информация из блока 11 о выдвинутых на текущей итерации гипотезах и точности оценки частоты на данной итерации (дискретности изменения переменной регрессионной функции в блоке 21), поступающая по управляющим сигналам. Сопоставление этой информации с полученной в узле 21 оценкой местоположения центра регрессионной функции позволяет определить частоту и выдать ее оценку на выход блока.
Управляющие сигналы, поступающие в блок 6 из блока управления 11, выполняют те же функции, что и ранее:
сигнал 1 определяет частоты выдвинутых гипотез, на которые настроены параллельные каналы приема (блоки 2 и 3),
сигнал 2 определяет вид сигнальной функции сформированных в блоках 3 оценок,
сигнал 4 задает требуемую точность оценки частоты на данной итерации.
На следующем шаге снова производят выбор времени когерентного накопления оценок Т, в окрестности полученной оценки частоты с учетом определенного для данной итерации интервала неопределенности формируют n гипотез и выполняют очередную итерацию оценки частоты, уточняя определенную на предыдущей итерации частоту.
Заявляемый способ определения частоты и устройство для его реализации (варианты) по сравнению с прототипом позволяют получить принципиально новый технический эффект:
определять частоту при большой априорной области неопределенности частоты в тех случаях, когда использование фазовых методов оказывается принципиально невозможным,
существенно сократить затраты на реализацию способа, что достигается за счет определения частоты последовательно за Q итераций,
получать оценку частоты с высокой точностью даже при очень низком отношении сигнал-шум,
определять частоту при реализации способа определения частоты для стандарта UMTS, имеющего временное разделение пилот-символов и символов информации, используя только символы пилот-сигнала, за время, незначительно превышающее время оценивания в прототипе,
определять частоту за время, существенно меньшее времени оценивания в прототипе, при реализации способа определения частоты для стандарта cdma2000, имеющего постоянно передаваемый пилот-сигнал.
Изобретение относится к области широкополосных сотовых систем радиосвязи, в частности может быть использовано в прямом канале по стандартам UMTS и cdma2000, для корректировки частоты опорного генератора, необходимой для когерентного приема сообщений, а также может использоваться при построении спутниковых систем связи, где возможно существование больших расстроек частоты. Технический результат - определение частоты при большой априорной области неопределенности частоты [-Fmax, Fmax], достижение высокой точности определения частоты даже при очень низком отношении сигнал/шум, уменьшение стоимостно-габаритных характеристик устройства. Определение частоты последовательно за Q итераций, поэтапное сужение априорной области неопределенности частоты до достижения требуемой точности оценивания позволяет использовать на каждой итерации меньшее количество параллельных частотных каналов приема сигнала относительно прототипа. Необходимая точность определения частоты достигается за счет использования опорной сигнальной функции, позволяющей восстановить информацию о возможном значении частоты на частотных интервалах между выдвинутыми гипотезами. Кроме того, обобщенные оценки корреляции для каждой из гипотез на всех итерациях формируются на основании k соответствующих оценок корреляции, что позволяет получать оценку частоты с высокой точностью даже при очень низком отношении сигнал-шум. 3 с. и 3 з.п. ф-лы, 5 ил.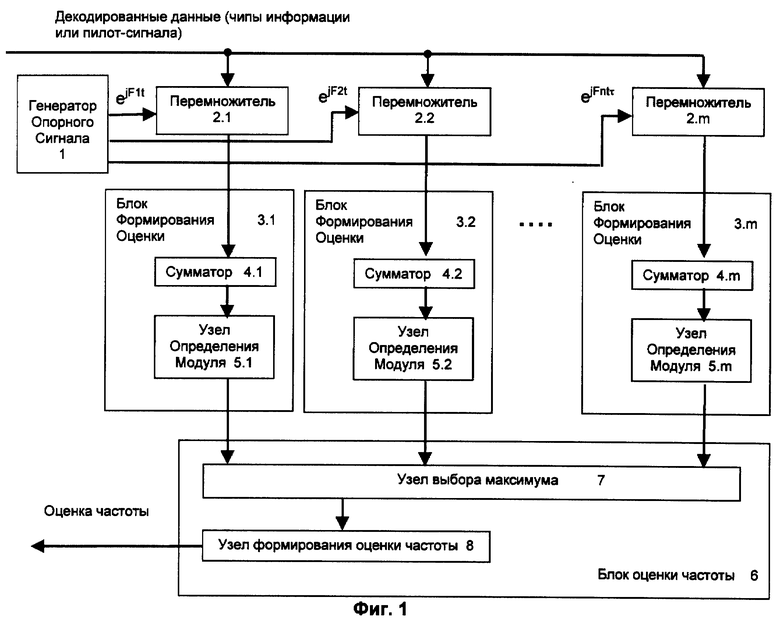
| ТИХОНОВ В.И | |||
| Оптимальный прием сигналов | |||
| - М.: Радио и связь, 1983, с.199, рис.3.13, с.230, рис.3.21 | |||
| ПРИЕМНОЕ УСТРОЙСТВО ФМ-СИГНАЛОВ | 1993 |
|
RU2085036C1 |
| Приемник фазомодулированныхСигНАлОВ | 1979 |
|
SU809602A1 |
| US 5487186 А, 13.01.1996 | |||
| US 4903328 А, 20.02.1990 | |||
| US 5289506 А, 22.02.1994 | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| US 5208835 А, 04.05.1993 | |||
| ПОРШНЕВОЙ ГАЙКОВЕРТ | 2010 |
|
RU2444429C1 |

