Изобретение относится к конструкции маховика с парными массами, предназначенного для передачи крутящего момента и поглощения или компенсации вибраций при вращении, которые могут возникать в узле трансмиссии транспортного средства.
Более конкретно, изобретение относится к маховику с парными массами того же типа, который описан в патенте GB 2254906, где две коаксиальные массы устанавливаются для ограничения их углового вращения относительно друг друга; множество рычагов соединяют две массы маховика, каждый рычаг имеет первое звено, осью вращения присоединенное к одной из масс маховика, и второе звено, осью вращения присоединенное к другой массе маховика, а также элементы для соединения первых и вторых звеньев осью вращения.
Конструкция, являющаяся предметом данного изобретения, обеспечивает усовершенствованную форму указанного выше типа маховика с парными массами.
Таким образом, в соответствии с настоящим изобретением получена конструкция маховика, содержащего две коаксиально расположенные массы, которые устанавливаются для ограничения углового вращения относительно друг друга; множество рычагов, соединяющих эти две массы маховика, и каждый рычаг имеет первое звено, осью вращения присоединенное к одной из масс маховика, а также второе звено, осью вращения присоединеное к другой из масс маховика, и центр вращения для соединенных осью первого и второго звеньев, характеризующийся тем, что он связан с осевым соединением, по крайней мере, одного звена с соответствующей ему массой маховика; имеется также эластичное звено для борьбы с вращением относительно друг друга указанных масс маховика.
Именно эластичные звенья будут препятствовать жестким элементам (хотя и не всем) при относительном вращении масс маховика.
Гибкие звенья могут подвергаться радиальному кручению (как это описано здесь ниже) или подвергаться аксиальному кручению (что также описано ниже).
Одно из звеньев может быть непосредственно присоединено к гибкому элементу.
В выбранной конструкции гибкое звено выполняется из упругого полимерного материала.
Гибкое звено может быть в виде пружины.
Смысл настоящего изобретения будет теперь описываться только на примере со ссылкой на сопровождающие текст чертежи, где на:
фиг. 1 - осевой вид маховика с парными массами, соответствующий настоящему изобретению и своей геометрически нейтральной позиции, выполненный в направлении B по фиг. 2;
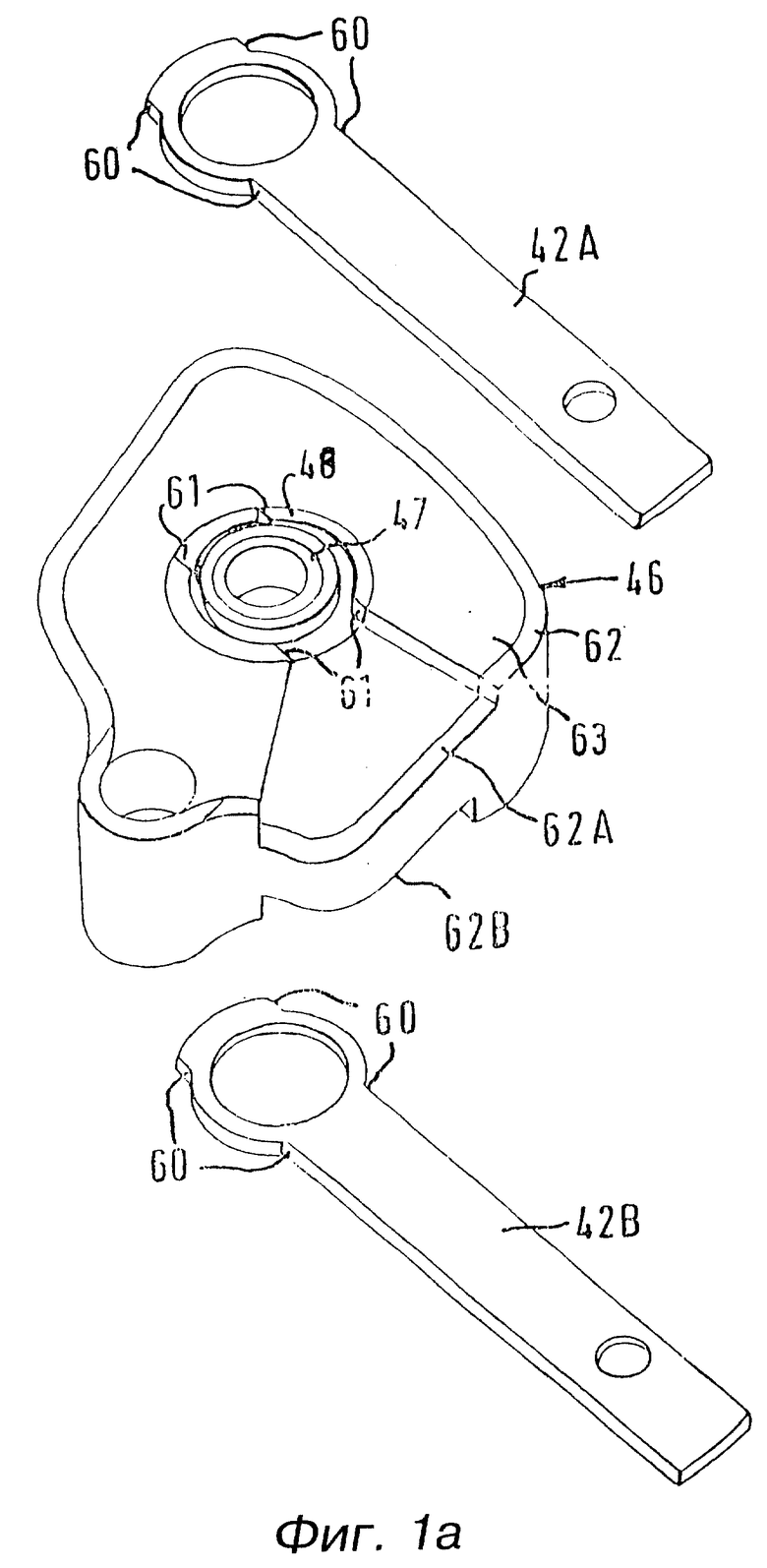
фиг. 1 a - аксонометрия узла кручения и соответствующих звеньев в разобранном виде;
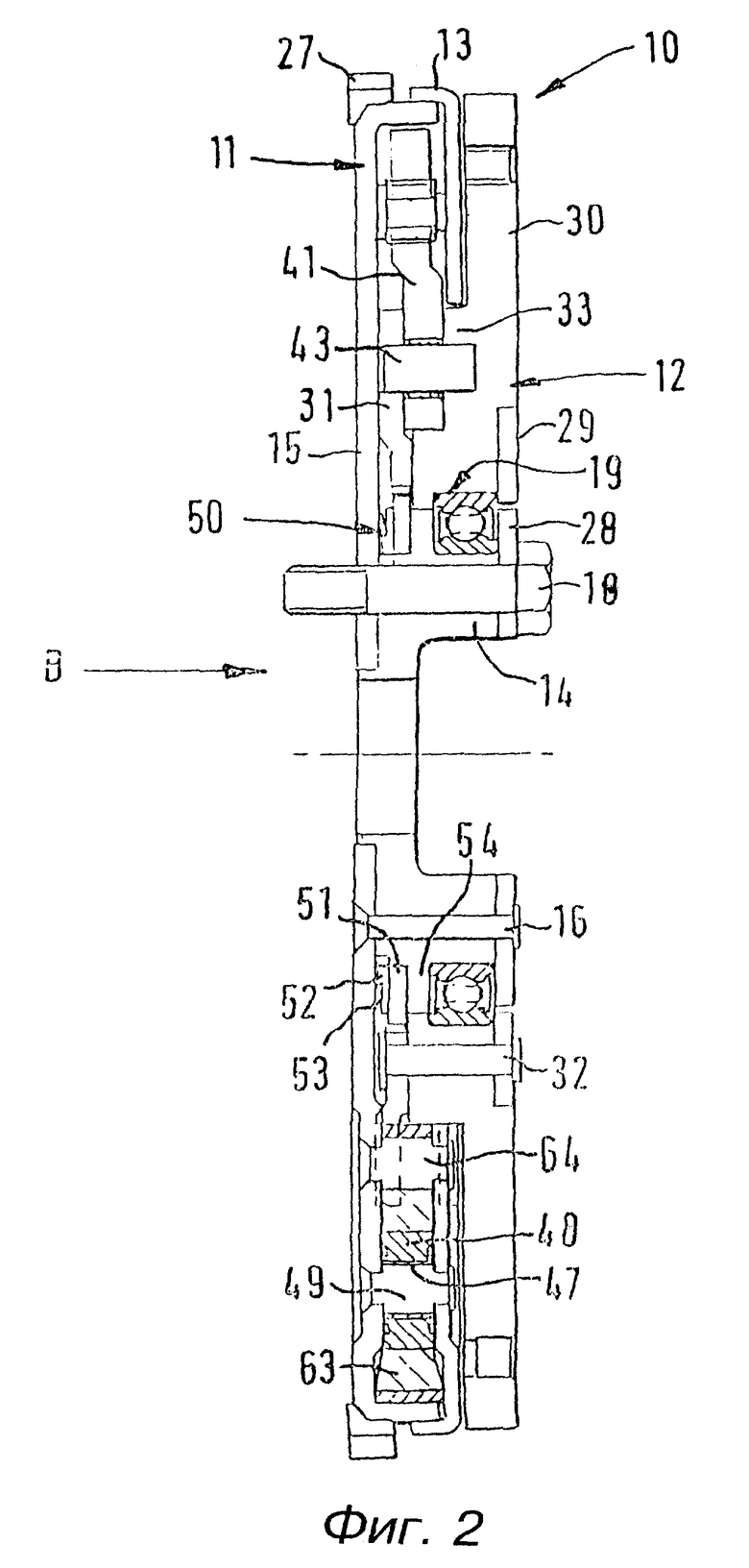
фиг. 2 - радиальное поперечное сечение по линии X-X на фиг. 1;
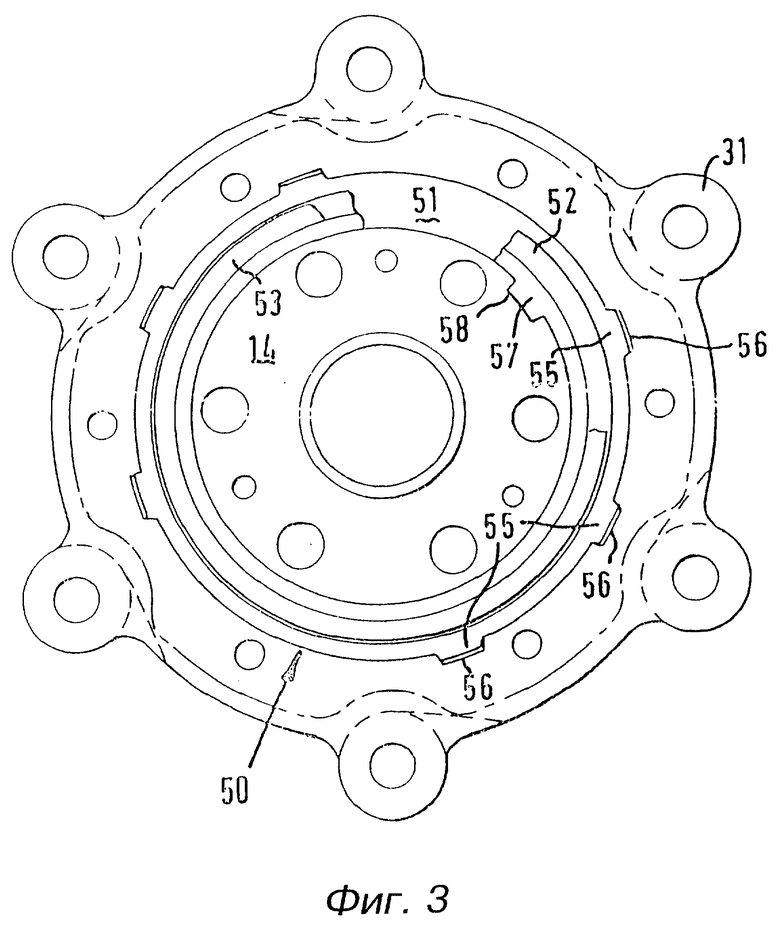
фиг. 3 - осевой вид в направлении B на фиг. 2;
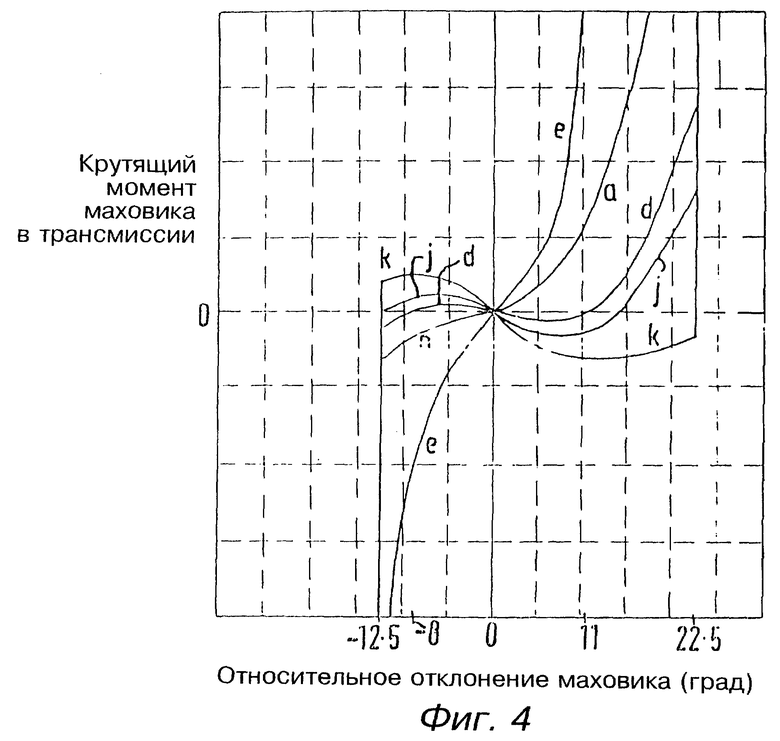
фиг. 4 - график относительного отклонения маховика в функции характеристик кручения трансмиссии для различных элементов кручения, которые могут быть использованы в маховике с парными массами, показанном на фиг. 1;
фиг. 5 - график относительного отклонения маховика в функции характеристик кручения соединяющегося звена маховика, используемого в маховике с парными массами, показанного на фиг. 1, для различных скоростей вращения (b, b1, b2, b3, b4 представляют соответственно скорости вращения маховика 800, 1600, 2400, 3200 и 4000 об/мин);
фиг. 6 - график относительного отклонения маховика в функции характеристик кручения для различных скоростей вращения одной конкретной конструкции маховика с парными массами, показанного на фиг. 1 (C, C1, C2, C3, C4 представляют скорости вращения маховика 800, 1600, 2400, 3200 и 4000 об/мин соответственно);
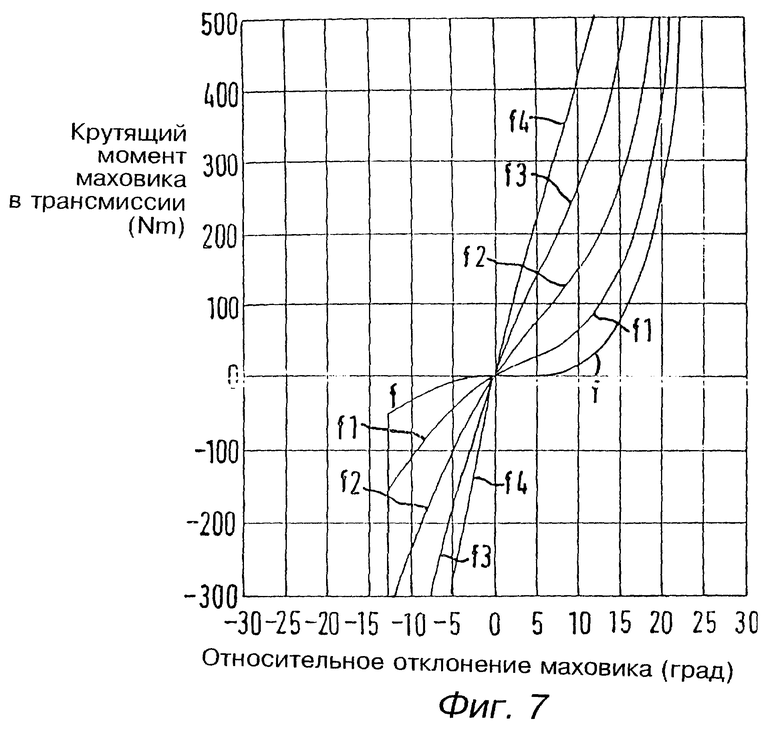
фиг. 7 - график относительного отклонения маховика в функции характеристик кручения для различных скоростей вращения модифицированной конструкции маховика с парными массами, показанного на фиг. 1 (F, F1, F2, F3, F4 представляют скорости вращения 800, 1600, 2400, 3200 и 4000 об/мин соответственно);
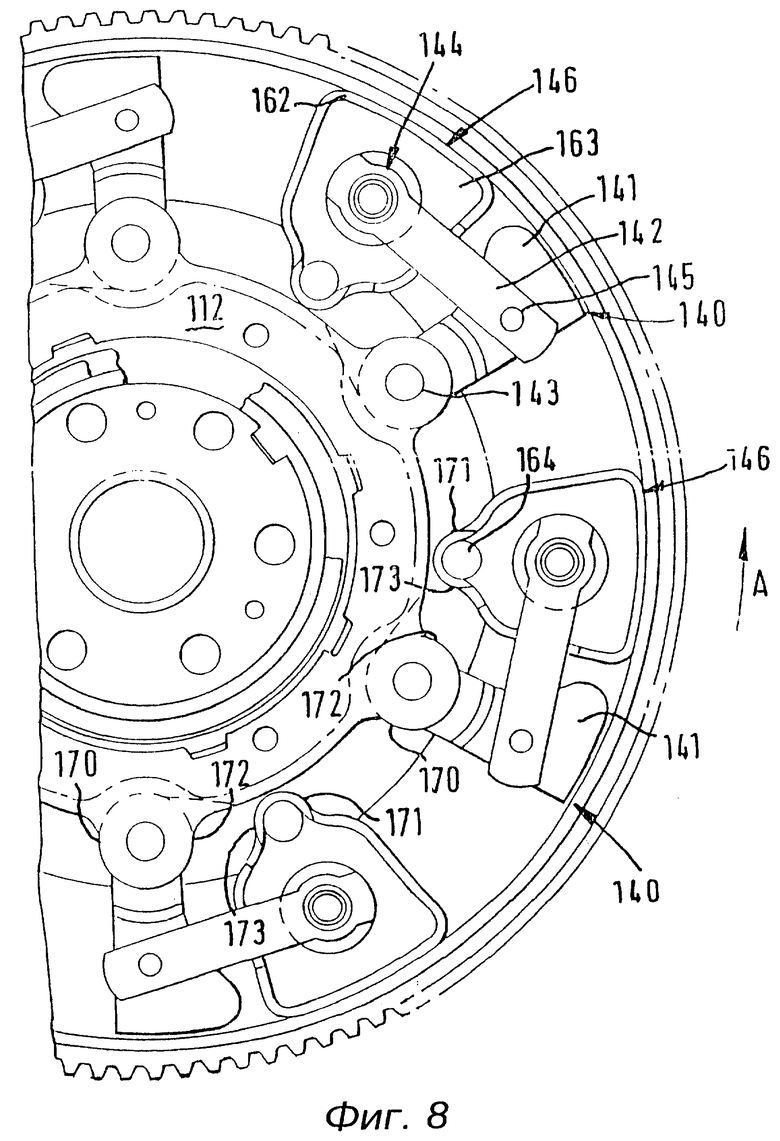
фиг. 8 - осевой разрез в том же направлении, как и на фиг. 1 второго варианта маховика с парными массами, в соответствии с настоящим изобретением;
фиг. 9 - график относительного отклонения маховика в функции характеристик кручения звена, используемого в маховике с парными массами, показанном на фиг. 8, для различных скоростей вращения (G, G1, G2, G3, G4 представляют скорости вращения маховика 800, 1600, 2400, 3200 и 4000 об/мин соответственно);
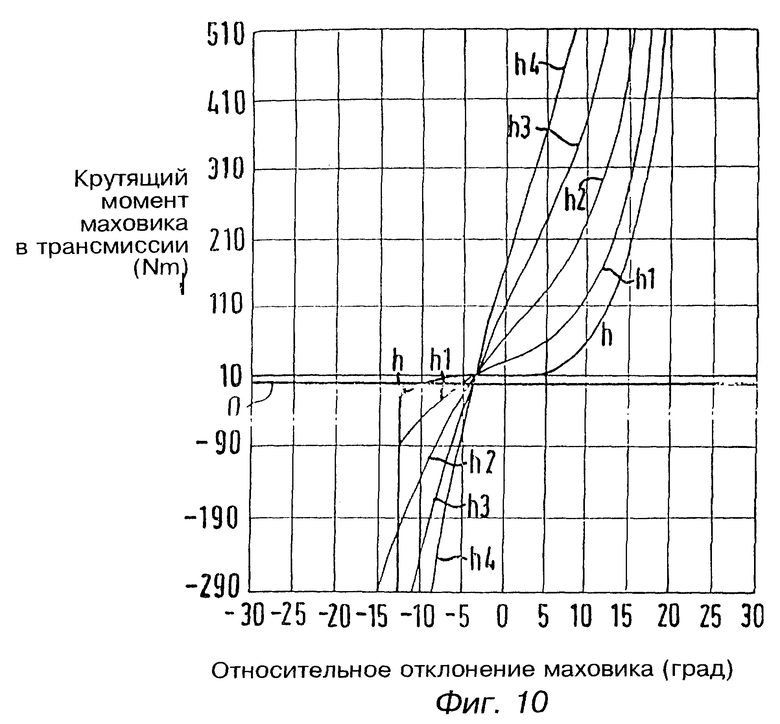
фиг. 10 - график относительного отклонения маховика в функции характеристик кручения для различных скоростей вращения маховика с парными массами, показанного на фиг. 8 (H, H1, H2, H3, H4 представляют скорости вращения маховика 800, 1600, 2400, 3200 и 4000 об/мин соответственно);
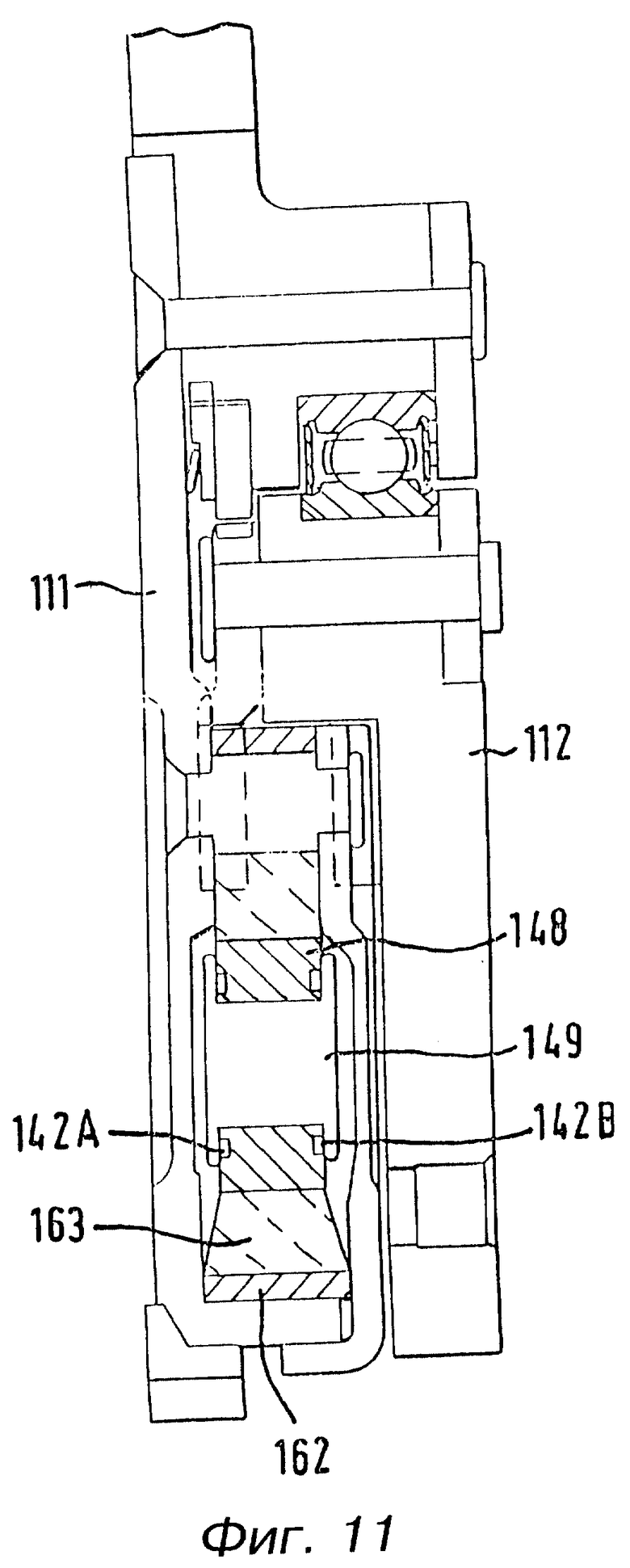
фиг. 11 - радиальное поперечное сечение в том же направлении, что и на фиг. 2, для третьего варианта маховика с парными массами в соответствии с настоящим изобретением;
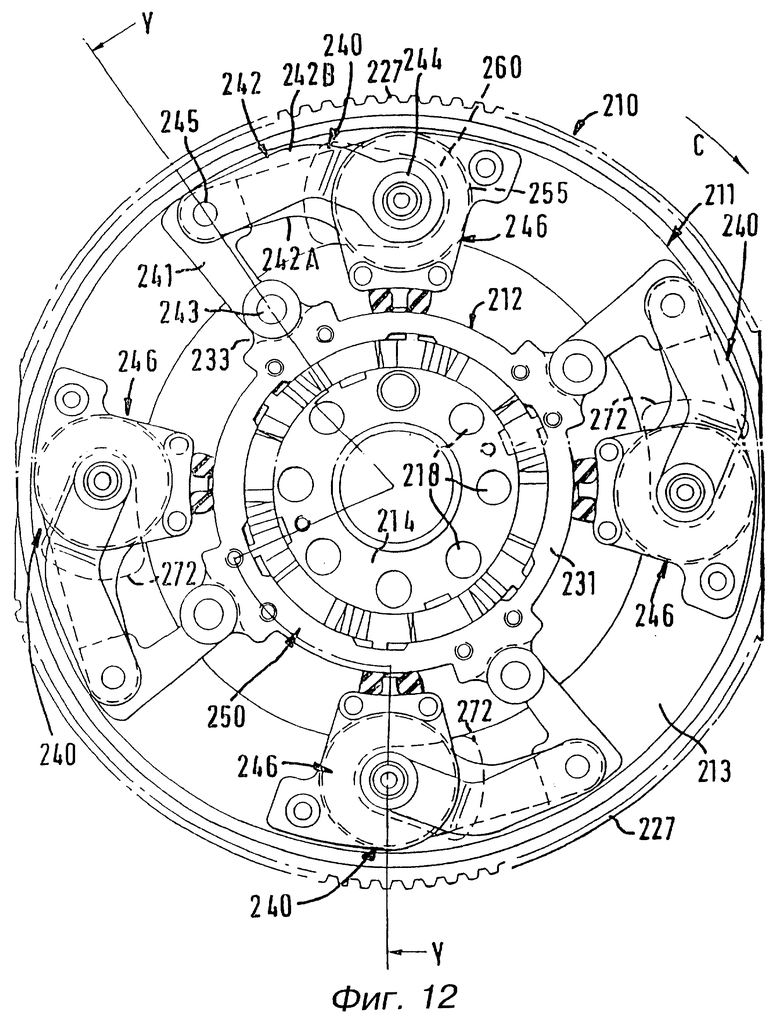
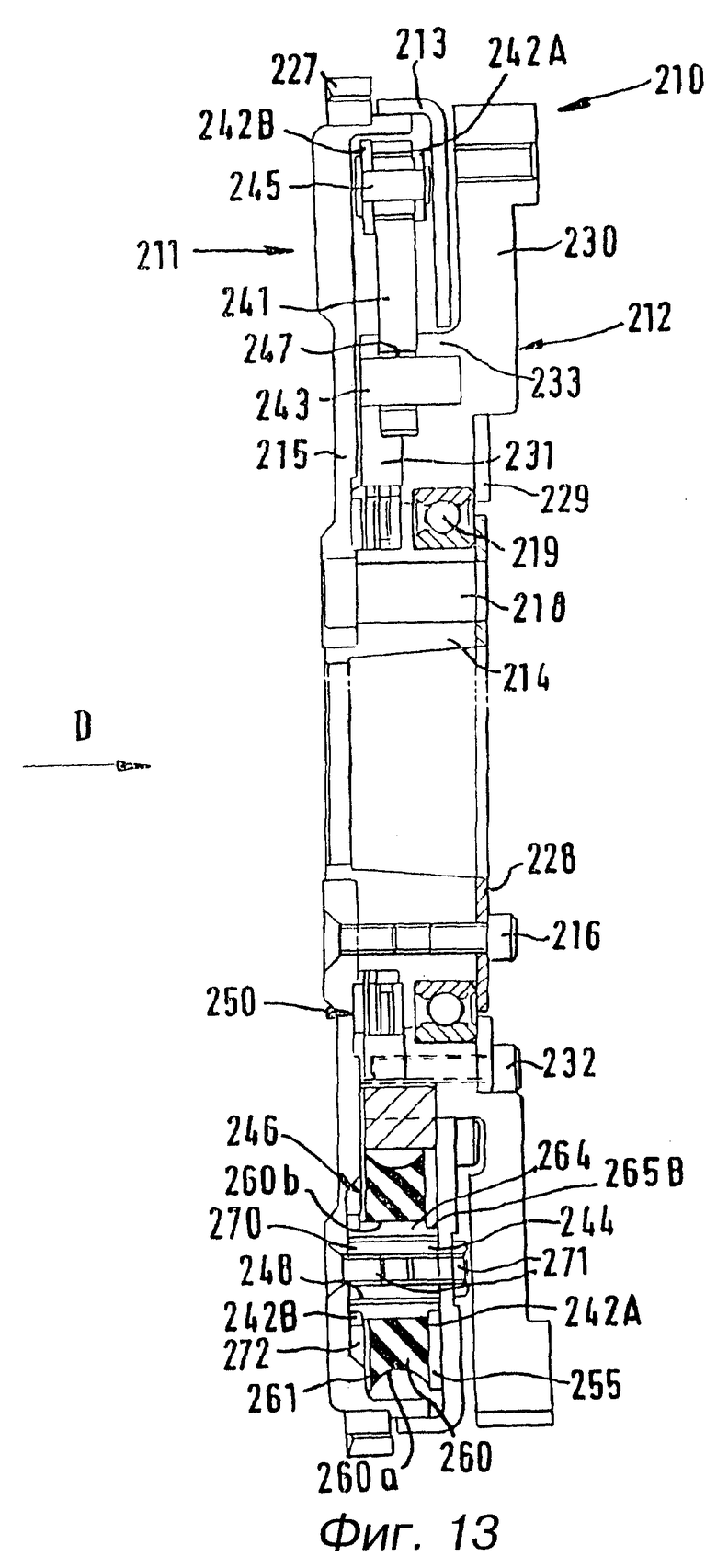
фиг. 12 - аксиальный разрез четвертого варианта маховика с парными массами в соответствии с настоящим изобретением в направлении D, показанном на фиг. 13;
фиг. 13 - радиальное поперечное сечение по линии Y-Y, показанное на фиг. 12;
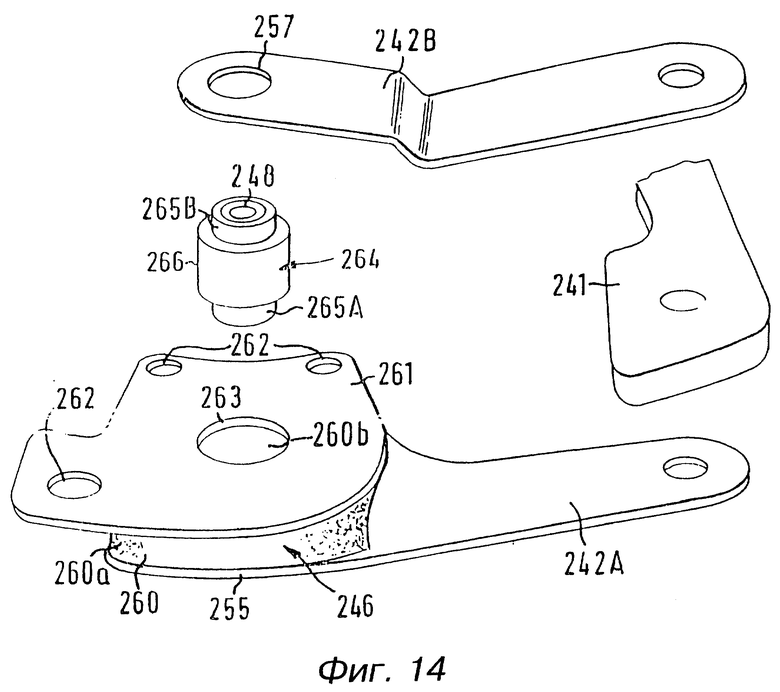
фиг. 14 - изометрия узла кручения в разработанном виде (каким он используется на фиг. 12 и 13) с примыкающими к нему деталями;
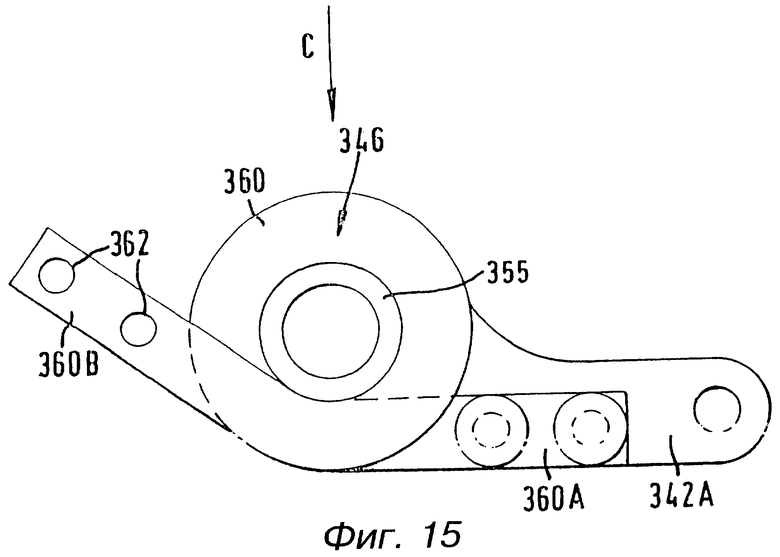
фиг. 15 - осевой вид еще одной конструкции узла кручения, которую можно будет использовать в маховике, показанном на фиг. 12 и 13;
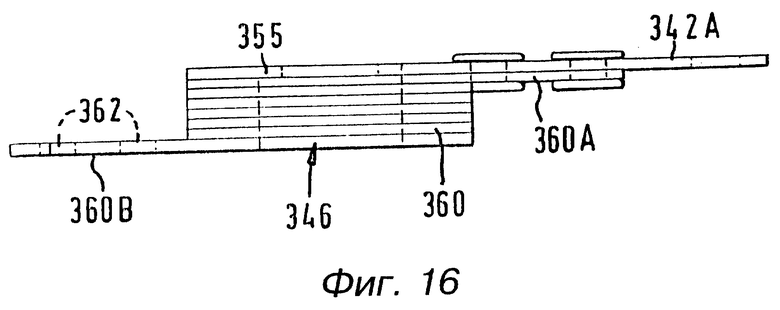
фиг. 16 - вид узла кручения, показанного на фиг. 15, в направлении стрелки C;
фиг. 17 - радиальное поперечное сечение еще одной конструкции узла кручения, которую можно будет использовать в маховике, показанном на фиг. 12 и 13;
фиг. 18 - осевой разрез маховика с парными массами в геометрически нейтральной позиции, включающий третью возможную конструкцию узла кручения;
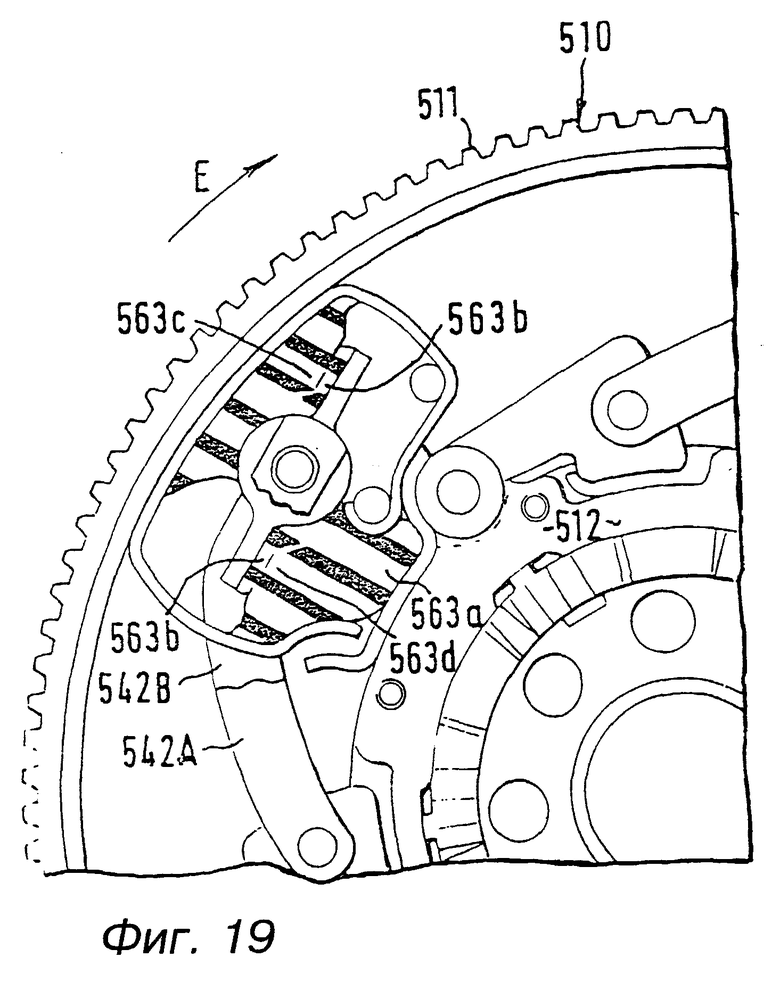
фиг. 19 - маховик с парными массами в позиции полного хода.
Если обратиться к чертежам на фиг. 1 и 2, то на них показан маховик с парными массами 10, который разделен на две массы 11 и 12. Одна из масс маховика 11 закреплена на коленчатом валу (здесь не показан) двигателя внутреннего сгорания с помощью центральной втулки 14 и болтов 18. В работе муфта сцепления (здесь не показана) соединяется со второй массой маховика 12. При условиях нормального движения и обратного движения транспортного средства маховик с парными массами 10 вращается в направлении против часовой стрелки, как видно из фиг. 1, что и показано стрелкой A.
Масса маховика 11 имеет центральную втулку 14, главную корпусную плиту 15, плиту в виде крышки 13 и кольцо-стартер 27, которое приваривается к главной корпусной плите 15. Поддерживающая внутренний подшипник плита 28 крепится к втулке 14 заклепками 16, чтобы удерживать подшипник 19, на котором устанавливается вторая масса 12 маховика.
Вторая масса 12 маховика имеет плиту маховика 30 с внешней поддерживающей подшипник плитой 29 и осевой плитой 31, обе последние плиты закрепляются на плите 30 заклепками 32.
Относительное вращение двух масс 11 и 12 маховика предотвращается множеством рычагов 40, множеством узлов кручения 46 и с помощью антифрикционных приспособлений 50.
В варианте, показанном на фиг. 1, имеются 6 рычагов 40, но их число может меняться, чтобы удовлетворять любому другому варианту. Каждый рычаг 40 имеет первое звено 41, закрепленное на оси вращения между центральной втулкой 33 массы 12 маховика и осевой плитой 31 на плоском подшипнике 47 так же, как ось вращения 43; и второе звено 42, установленное на оси вращения на маховиковой массе 11 так же, как ось вращения 44 узла кручения 46. Два звена 41 и 42 соединены друг с другом с помощью третьей оси 45. Следует заметить на основании фиг. 1, что ось вращения 43 установлена радиально ближе к центру, чем оси 44 и 45. Первое звено 41 выполняется в бобообразном виде и имеет на шаровом конце большую массу, удаленную от оси вращения 43. Второе звено 42 имеет пару параллельных плеч 42A, 42B (см. фиг. 1A), которые расположены аксиально на каждой стороне звена 41.
Предпочтительнее, чтобы был один узел кручения 46 на каждом рычаге 40, но возможно, чтобы их было больше чем один или их совсем бы не было в зависимости от варианта конструкции.
Каждый узел кручения 46 (см. фиг. 1A) имеет центральную металлическую втулку 48 и внешнюю листовую металлическую обшивку 62, а также внутренний корпус из упругого пластика 63, внешняя поверхность которого ограничена обшивкой 62, а внутренняя поверхность ограничивается втулкой 48.
Обычно упругим полимерным материалом (63 или 163, 260, 460, 560 см. ниже) может служить этилен-пропиленовый штампованный мономер (EPDM) или гидрогенированная нитрилбутиловая резина (HNBR), причем твердость материала может быть от 70 до 80 градусов по шкале A твердости Шора, но нет необходимости ограничиваться указанными выше материалами и указанной выше величиной твердости.
Каждый узел кручения закреплен между основной корпусной плитой 15 и корпусной плитой в виде крышки 13 заклепками 49 (см. фиг. 2), которые образуют оси 44, и с помощью заклепок 64, установленных радиально ближе к центру. Каждая втулка 48 поддерживается относительно соответствующей заклепки 49 на плоском подшипнике 47, чтобы дать возможность ограниченного вращения относительно корпуса 62 путем деформации упругого полимерного материала 63.
Это вращение втулок находится под воздействием соответствующих звеньевых пар 42A, 42B благодаря выточкам на концах втулок 48, как показано на фиг. 1A, что создает опоры 61, которые контактируют с соответствующими опорами 60 на соответствующих концах звеньев 42A, 42B.
Следует отметить, что относительное вращение маховиковых масс 11, 12 приводит к вращению вокруг оси звеньевых пар 42A, 42B на соответствующих осях вращения 49, которые вращают втулки 48. Это создает крутящий момент в упругом полимерном материале, предотвращая таким образом относительное вращение маховиковых масс.
Заметим, что так как первая и вторая поверхности упругого полимерного материала разделены радиально, то при вращении втулки 48 относительно обшивки 62 упругий полимерный материал 63 подвергается радиальному сдвигу, то есть первая и вторая ограничительные поверхности упругого полимерного материала, которые вращаются относительно друг друга, расходятся радиально в противоположные стороны.
Каждый корпус узла кручения 62 имеет две аксиальные выточки 62A, 62B, которые позволяют моментам от плечей 42A, 42B передаваться так, что эти плечи могут сближаться, создавая конструкцию компактного узла.
Радиально удаленная от центра часть первого звена 41 аксиально перемещается от радиально близкой к центру части первого звена 41 (то есть она имеет аксиальный паз), образуя конструкцию компактного узла. В качестве альтернативной может использоваться ненарезная беспазовая конструкция.
Все компоненты рычагов, соответствующие оси вращения, и узлы кручения помещаются радиально и аксиально между основной корпусной плитой 15 и плитой в виде крышки 13, чтобы в случае выхода из строя упругого полимерного материала все сломанные детали остались бы между этими плитами.
Устройство 50 для уменьшения трения (см. фиг. 2 и 3) включает в себя круглую фрикционную пластину 51, имеющую выступы 55, которые входят в прорези 56 в центральной пластине 31, так что фрикционная пластина 51 не вращается, но может перемещаться по центральной пластине 31. Антифрикционное устройство 50 также включает в себя круглую прижимающую пластину 52, имеющую выступ 57, который входит в прорезь 58 в центральной втулке 14 (так что пластина 52 не вращается, но может аксиально перемещаться по центральной втулке 14), которая смещается куполообразной пружиной 53 и входит во фрикционный контакт с фрикционной пластиной 51 между основной корпусной пластиной 15 и опорой 54 на центральной втулке 14. Следует отметить, что устройство 50 для уменьшения трения гасит любой ротационный момент маховиковых масс 11 и 12 относительно друг друга.
Действие маховика с парными массами, показанного на фиг. 1 - 3, здесь не будет описываться. При условии отсутствия нагрузки с незадействованной муфтой центробежная сила действует на рычаг 40 и частично на первое звено 41 и приводит в движение рычаги в направление радиально от центра. При более высоких скоростях вращения центробежная сила больше, и хотя это не влияет на конфигурацию при условиях отсутствия нагрузки, но оказывает значительное влияние на силу, требуемую для перемещения маховиковой массы 12 относительно маховиковой массы 11, то есть на жесткость маховика при кручении.
Если муфта включена и мощность передается в направлении движения от маховиковой массы 11 к маховиковой массе 12 (то есть маховиковая масса 11 вращается против часовой стрелки относительно маховиковой массы 12, как видно из фиг. 1), существует тенденция для этих двух масс вращаться относительно друг друга. При относительно низких скоростях, когда влияние центробежной силы мало, маховиковые массы быстро движутся относительно друг друга, то есть жесткость маховика при кручении относительно мала. Следовательно, при относительно высоких скоростях влияние центробежной силы значительно больше и относительное вращение маховиковых масс требует больших усилий, то есть жесткость маховика при кручении относительно высока. Регулирующее влияние рычага на относительное вращение маховиковых масс и на скорость показано на фиг. 5. Кривые b, b1, b2, b3 и b4 на фиг. 5 показывают отклонение в функции характеристик кручения для скоростей вращения маховика 500, 1600, 2400, 3200 и 4000 об/мин соответственно.
Если муфта включена и мощность передается в направлении от маховиковой массы 12 к маховиковой массе 11 (то есть маховиковая масса 11 вращается по часовой стрелке относительно маховиковой массы 12, как показано на фиг. 1), воздействия будут такими же, как описанные выше, но не для вариантов маховика, показанного на фиг. 1-3, где первое звено 41 складывается под второе звено 42.
В условиях низкой скорости вращения и высокого крутящего момента в направлении движения транспортного средства относительное вращение между маховиковыми массами 11 и 12 имеет место до тех пор, пока опоры 70 на маховиковой массе 12 находятся в контакте с опорами 71 на обшивке узла кручения 62. Опоры 70, 71 действуют как конечные точки движения, которые ограничивают дальнейшее вращение маховиковых масс 11, 12.
При условиях низкой скорости вращения и высокого крутящего момента в обратном направлении движения относительное вращение маховиковых масс 11 и 12 возникает до тех пор, пока опоры 72 на маховиковой массе 12 контактируют с опорами 73 на обшивке узла вращения 62. Опоры 72, 73 действуют как конечные точки при обратном движении транспортного средства, чтобы и далее ограничивать вращение маховиковых масс 11, 12.
Опоры 70, 71 и 72, 73 выполнены таким образом, что оси вращения 44, 45 и 43 не устанавливаются в одну линию. Влияние этих опор при движении в прямом и обратном направлении видно на фиг. 5 и представляется вертикальными линиями с абсциссами +22,5 и -12 градусов соответственно относительно отклонения маховика.
Регулирующее влияние узла кручения (см. фиг. 4) не зависит от скорости вращения маховика с парными массами, но зависит от геометрии рычагов 40, формы узла кручения и упругого полимерного материала.
У каждого рычага 40 в его геометрически нейтральной позиции (см. фиг. 1), то есть с осями вращения 45 и 43 каждого рычага, установленными в одну линию на радиальной плоскости маховика с парными массами 10, ось 45 находится в своей наиболее радиально удаленной от центра позиции и, следовательно, вторая ось 42 также находится в своей радиально наиболее удаленной от центра позиции. Любое относительное вращение маховиковых масс 11 и 12 либо в прямом, либо в обратном направлениях будет существенно перемещать ось вращения 45 в радиальном направлении к центру, следовательно, второе звено 42 и втулка узла кручения 48 будут вращаться относительно обшивки узла кручения 62.
Если маховик с парными массами 10 собран так, что узлы кручения 46 не наклоняют звено 42 относительно соответствующих осей вращения при любом направлении вращения (то есть каждый узел кручения находится в его нейтральной позиции), и когда рычаг 40 находится в его геометрически нейтральной позиции, тогда любое относительное вращение маховиковых масс 11 и 12, отклоняющееся от этой позиции в прямом или обратном направлении, вызывает в узле кручения 46 возвратную силу, которая пытается возвратить звено 40 в его геометрически нейтральную позицию. Регулирующий эффект этой возвратной силы на относительное вращение маховиковых масс показан на фиг. 4 по линии a.
Регулирующий эффект узла кручения 46 является дополнительным к регулирующему эффекту рычага 40 при любой заданной скорости, следовательно, характеристика маховика с парными массами 10 при указанной скорости 800 об/мин представлена на фиг. 4 по линии a и фиг. 5 по линии b, а также фиг. 6 по линии c. В этом случае жесткость при кручении маховика с парными массами 10 возросла благодаря величине относительной скорости вращения маховика по сравнению с жесткостью при кручении рычагов 40.
Маховик с парными массами 10 может быть также собран так, что когда рычаг 40 находится в его геометрически нейтральной позиции, узел кручения 46 наклоняет второе звено 42 в направлении по часовой стрелке или против часовой стрелки по отношению к соответствующим осям вращения, как показано на фиг. 1.
Это достигается вращением втулки узла кручения 48 по часовой или против часовой стрелки по отношению к обшивке узла кручения 62 (как показано на фиг. 1) до сцепления втулки узла кручения и обшивки узла кручения с упругим полимерным материалом. На фиг. 4 линии d, j и k показывают влияние такого вращения втулки по часовой стрелке, а линия e показывает влияние вращения против часовой стрелки.
В первой конструкции (см. фиг. 4 линия d), когда второе звено 42 наклоняется по часовой стрелке, как показано на фиг. 1, с помощью узла кручения, когда рычаг находится в его геометрически нейтральной позиции, существуют три позиции отклонения маховика, в которых влияние узла кручения равно нулю, т о есть при -8, 0 и +11 градусах (то есть позиции, в которых линия d пересекает ось нулевого кручения на фиг. 4). Это получается, потому что при -8 и +11 градусах узел кручения относительно вращения маховика находится в его нейтральной позиции по кручению (то есть не наклоняет звено 42 ни в направлении по часовой стрелке, ни в направлении против часовой стрелки), а при нуле градусов, хотя узел кручения наклоняет звено 42 по часовой стрелке, как показано на фиг. 1, рычаг находится в позиции мертвой точки (то есть оси вращения 45 и 43 находятся на одной линии на радиальной плоскости маховика с парными массами 10).
Когда кривая (фиг. 4 линия d) добавляется к кривым на фиг. 5, чтобы получить кривые на фиг. 7, тогда получается эффект сглаживания кривых низких величин отклонения, хотя все еще осуществляется ужесточение маховика возле конечных стопорных позиций. Это наилучшим образом демонстрируется сравнением фиг. 6 линия c с фиг. 7 линия f.
На фиг. 4 линия j показывает характеристику еще одной конструкции, где при -12,5, 0 и +14 градусах влияние узла кручения равно нулю. На фиг. 4 линия k показывает характеристику конструкции, в которой величина вращения втулки все еще такова, что существует только одна позиция отклонения маховика (0 градусов) в пределах рабочей величины отклонений маховика, когда влияние узла кручения равно нулю. Это происходит потому, что в конечных стопорных позициях масс маховика узел кручения все еще не достигает своей нейтральной позиции по кручению.
Может оказаться особенно привлекательным использование характеристики маховика с парными массами, показанной на фиг. 7, которая при низких скоростях двигателя имеет низкую жесткость при кручении (то есть низкий градиент графических линий f, f1, f2 и т.д.) на малых углах отклонения, чтобы избежать таких явлений, как дребезжание коробки передач на скорости холостого хода, но которая имеет высокую жесткость при кручении (то есть высокий градиент графических линий f, f1, f2 и т.д.), когда рычаг достигает своей концевой стопорной позиции, чтобы избежать или минимизировать дребезжание при конечной остановке.
Конструкция маховика с парными массами, приведенная выше на фиг. 1-3, имеет следующие преимущества:
a) Узел кручения 46 может быть сконструирован для контроля относительного перемещения маховиковых масс с учетом полной величины их углового перемещения без перенапряжения упругого полимерного материала 63, что может вызвать поломку. Это возможно, поскольку угловая величина перемещения второго звена 42 относительно соответствующей ему маховиковой массы 11 (33 градуса) при полном угловом перемещении маховиковых масс значительно меньше, чем величина перемещения между первым звеном 41 и вторым звеном 42 (97 градусов) при том же самом угловом перемещении масс и, следовательно, узел кручения 46 может быть сконструирован так, чтобы сочленяться по всей величине указанных 33 градусов действия момента.
b) Упругий полимерный материал 63, используемый в качестве гибкого звена в узле кручения, имеет нелинейный и увеличивающийся крутящий момент, зависящий от характеристики отклонения, то есть крутящий момент, требуемый для отклонения втулки, например, на 10 градусов относительно обшивки, окажется более чем в два раза выше крутящего момента, требуемого для вращения втулки на 5 градусов. Также жесткость зависит от частоты приложения момента и увеличивается с ее увеличением. Узел кручения также имеет гистерезис, который сглаживает флуктуации при передаче момента от двигателя. Гистерезис также зависит от частоты приложения момента и увеличивается с ее увеличением. Эти характеристики могут быть привлекательны для демпфирования относительного вращения маховика, в особенности, при запуске двигателя транспортного средства.
c) Позиционирование гибкого звена на оси вращения или позиционирование рычага с соответствующей ему маховиковой массой (а не соединением оси вращения первого и второго звеньев) позволяет звеньям (в частности, звену 41) возможность иметь большую массу, так как упругий полимерный материал имеет меньшую плотность, чем материал звеньев. Это создаст большее регулирующее усилие, зависящее от центробежной силы и скорости.
d) Когда узел кручения устанавливается на маховиковой массе, размер вкладыша из гибкого полимера уже не ограничивается расположением в одном из звеньев 41 или 42. Упругий полимерный материал в большем узле кручения меньше нагружается на каждый градус отклонения при кручении, чем упругий полимерный материал в меньшем узле кручения.
e) Упругий полимерный материал нагружается только при кручении. Коэффициент расширения обшивки и вкладыша узла кручения больше, чем коэффициент расширения упругого полимерного материала. Ограничение упругого полимерного материала обшивкой и втулкой узла кручения осуществляется при повышенной температуре, так что в холодном состоянии упругий полимерный материала находится в напряжении. Для оптимизации срока службы узла кручения, который испытывает усилия кручения, растяжения и сжатия, его втулка должна иметь способность механически расширяться для снятия остаточных напряжений. Однако, когда узел кручения подвергается только крутящим нагрузкам, эта дополнительная операция не требуется.
f) При большей степени управления относительным вращением маховиковым масс амортизирующие конечные опоры больше не требуются, так как усилие и частота воздействия меньше при использовании конечных опор.
g) Возможно также получение преимуществ за счет получения нескольких характеристик жесткости при кручении для маховика с парными массами при тех же самых или аналогичных компонентах. Характеристики узла кручения могут изменяться при использовании различных сортов упругого полимерного материала или при изготовлении узла кручения с пустотами в полимерном материале, или при изменении поперечного сечения полимерного материала, или изготовлением опор 60 и 61 таким образом, что второе звено 42 может вращаться на ограниченную величину до того, как начнет вращаться втулка узла кручения 48 (то есть получить холостой ход между втулкой узла кручения 48 и вторым звеном 42).
Как отмечалось выше, общие характеристики маховика 10 с парными массами могут изменяться при изменении отдельных характеристик узла кручения. Однако узлы кручения не должны быть одинаковыми. Так, например, только с двумя типами узла кручения с различными характеристиками x и y и с маховиком с парными массами с шестью рычагами каждый с одним узлом кручения общие характеристики пяти сбалансированных маховиков с парными массами могут быть получены (например, используя 6x или 6y, или 3x и 3y, или 2x и 4y, или 4x и 2y). Таким образом, с помощью лишь малого числа различных узлов кручения маховик с парными массами может быть оптимизирован для нескольких различных конструкций, обеспечивая таким образом экономию на количестве деталей и стоимости необходимых компонентов.
На фиг. 8 показан второй вариант маховика с парными массами, аналогичный маховику 10 с парными массами на фиг. 1, в котором аналогичные компоненты указываются под теми же номерами, что и на фиг. 1, но с добавлением цифры 100. Различие с конструкцией на фиг. 1 состоит в том, что звенья 141 не являются симметричными по окружности (то есть центры масс звеньев не лежат на линии, по которой перемещаются оси вращения 143 и 145). Узлы кручения 146 имеют то же самое отклонение в зависимости от характеристики кручения, как представлено на фиг. 4 линией d. Влияние асимметричных по окружности звеньев может иметь конкретное преимущество, если они используются в соединении с узлами кручения.
Центробежно нейтральная позиция асимметричного звена (то есть позиция рычага, приспособленного к тому, что маховик вращается и передает нулевой крутящий момент) является в общем случае не той же самой позицией, как геометрически нейтральная позиция, получающаяся благодаря смещению между центром масс звеньев 41 и 141. Она создает эффект перемещения крутящего момента влево в зависимости от графика отклонения (см. фиг. 9) по сравнению с аналогичным графиком (фиг. 5) для симметричных звеньев.
Влияние узла кручения не зависит от асимметрии звена и, следовательно, нет изменения в поведении узлов кручения, которые соответствуют характеристикам, показанным графически на фиг. 4 линия d. Преимуществом оказывается способность изменять характеристики рычага и узла кручения относительно друг друга и получать различные общие характеристики для более легкой оптимизации характеристик конкретной конструкции. На фиг. 10 показаны общие характеристики, построенные с помощью сложения характеристик рычага g-g4 на фиг. 9 с характеристиками узла кручения d на фиг. 4. И еще в одной конструкции, по крайней мере, одно из плеч 42A, 42B может быть выполнено совмещенно с металлической втулкой 48 и без того, чтобы упругий полимерный материал ограничивался непосредственно совмещенным плечом, - в этом случае совмещенное плечо было бы ограничено упругим полимерным материалом.
На фиг. 11 показана еще одна конструкция маховика с парными массами, аналогичная маховику 10 с парными массами на фиг. 1, в которой те же самые компоненты снова пронумерованы так же, как на фиг. 1, но с добавлением цифры 100. На фиг. 11 заклепки 149 только прижимают плечи 142A и 142B к втулке узла кручения 148. Это позволяет ограничить радиальный и периферийный по окружности моменты заклепки 149 относительно обшивки узла кручения 162. Хотя эта конструкция создает дополнительные напряжения растяжения и сжатия в упругом полимерном материале 163, так как все крутящие моменты между маховиковыми массами передаются через упругий полимерный материал, но она обеспечивает уменьшение вибраций при движении транспортного средства между маховиковыми массами 111 и 112, так как плечи 142A и 142B только соприкасаются с маховиковой массой 111 через упругий полимерный материал 163.
На фиг. 12 - 14 соответствующими чертежами иллюстрируется еще одна конструкция маховика 210 с парными массами, которая разделяется на две маховиковые массы 211 и 212. Одна маховиковая масса 211 закрепляется на коленчатом валу (не показан) двигателя внутреннего сгорания с помощью центральной втулки 214 и болтов (не показаны), которые проходят через отверстия 218. В реальной конструкции фрикционная муфта (не показана) прикрепляется ко второй маховиковой массе 212. При условиях движения транспортного средства вперед и назад маховик с парными массами вращается по часовой стрелке, как показано на фиг. 12 стрелкой C.
Маховиковая масса 211 состоит из центральной втулки 214, главной корпусной плиты 215, плиты в виде крышки 213 и стартерного кольца 227, которое приваривается к основной корпусной плите 215. Поддерживающая внутренний подшипник плита 228 закрепляется на втулке 214 болтами 216, поддерживая подшипник 219, на котором устанавливается вторая маховиковая масса 212.
Вторая маховиковая масса 212 состоит из маховиковой плиты 230 с поддерживающей внешней подшипник плитой 229 и осевой плитой 231. Обе последние плиты крепятся к маховиковой плите 230 болтами 232.
Относительное вращение между двумя маховиковыми массами 211 и 212 регулируется множеством рычагов 240, упругими звеньями в виде множества узлов кручения 246 и антифрикционными приспособлениями 250.
Каждый рычаг 240 имеет первое звено 241, установленное на оси вращения между центральной втулкой 233 маховиковой массы 212 и осевой плитой 231 на плоском подшипнике 247 с помощью первой оси вращения 243, и второе звено 242, установленное на оси вращения на маховиковой массе 211 с помощью второй оси вращения 244, связанной с узлом кручения 246. Два звена 241 и 242 соединены друг с другом с помощью третьей оси вращения 245. Следует отметить, что первая ось вращения 243 устанавливается радиально ближе к центру, чем вторая и третья оси вращения 244 и 245. Первое звено 241 имеет бобообразную форму с большей шарообразной массой на его конце, удаленном от оси вращения 243. Второе звено 242 имеет пару плеч 242A, 242B (см. фиг. 14), которые расположены аксиально на каждой стороне звена 241. Плечо 242A имеет форму диска 255 на одном осевом конце, а один конец плеча 242B аксиально расположен по отношению к другому концу, чтобы обеспечить зазор между плечом 242B и различными другими деталями маховика 210 с парными массами.
Каждый узел кручения 246 (см. фиг. 14) состоит из круглого кольца из упругого полимерного материала 260, с одной осевой стороны которого он ограничивается дискообразной частью 255 плеча 242A, а с другой аксиальной стороны которого он ограничивается пластиной 261, которая имеет крепежные отверстия 262 и центральное отверстие 263.
Набивка 264, устанавливаемая внутри узла кручения, выполнена с одноступенчатым аксиальным концом 265A, впрессованным в отверстие в дискообразной части 255 плеча 242A. Другой ступенчатый аксиальный конец 265B набивки 264 впрессовывается в отверстие 257 в плече 242B.
Размеры большего диаметра детали 266 набивки 264 обеспечивает то, что плечо 242B не соприкасается с плитой 261 и набивка не соприкасается с краем отверстия 263. Набивка 264 имеет аксиальное отверстие, в котором закрепляется низкофрикционный подшипник 248 в форме стального опорного PTFE ленточного вкладыша. Этот подшипник вращается на втулке 270, которая закрепляется неподвижно между главной корпусной плитой 215 и плитой в виде крышки 213 болтами 271. Таким образом, болты 271 и втулка 270 образуют неподвижную часть оси вращения 244 и подшипника 248 и набивки 264 в отличие от подвижной части оси вращения 244. Плита 261 крепится болтами (не показаны), которые проходят через крепежные отверстия 262 к главной корпусной плите 215.
Еще одна конструкция гибкого звена может иметь профилированную плиту, ограниченную упругим полимерным материалом, и профилированное плечо, закрепленное на плоскости с профилированной плитой и профилированным плечом, заменяющим плечо 242A.
Основная корпусная плита 215 имеет выточки 272 (позиция которых показана пунктиром на фиг. 12) для того, чтобы не было контакта между плечом 242B и плитой 215 при относительном вращении маховиковых масс 211 и 212.
Антифрикционное приспособление 250 является мультиплоскостным антифрикционным устройством, подобным антифрикционному приспособлению 50, представленному на фиг. 1.
Действие маховика 210 с парными массами аналогично действию маховика 10 с парными массами на фиг. 1, но маховик 210 вращается по часовой стрелке, как показано стрелкой C, и когда мощность передается в направлении движения маховиковая масса 211 вращается по часовой стрелке относительно маховиковой массы 212, и наоборот, когда мощность передается в направлении, обратном движению.
В результате относительное вращение маховиковых масс 211 и 212 будет заставлять плечи 242A и 242B каждого рычага вращаться в унисон с их соответствующим центром вращения 244, вызывая таким образом отклонение при кручении упругого полимерного материала 260 каждого узла кручения 246.
Следует отметить, что упругий полимерный материал 260 имеет одну поверхность, ограниченную плечом 242, и вторую поверхность, ограниченную плитой 261 соответствующего ему узла кручения. Плита 261 жестко скрепляется с маховиковой массой 211, которая регулирует относительное вращение маховиковых масс.
Так как первая и вторая ограничительные поверхности упругого полимерного материала аксиально разделены, то когда плечо 242A вращается относительно плиты 261, упругий полимерный материал 260 подвергается аксиальному сдвигу, то есть первая и вторая ограничительные поверхности, которые вращаются относительно друг друга, раздвигаются аксиально. В противоположность этому в узле кручения 46 упругий полимерный материал 63 подвергается радиальному сдвигу, как это было показано выше.
Следует далее заметить, что упругий полимерный материал 260 имеет две круглые свободные поверхности 260a, 260b, которые не контактируют ни с одной из частей маховика с парными массами. Свободная поверхность 260a вогнута в поперечном сечении, что снижает напряжения в упругом полимерном материале по сравнению со средним напряжением, обеспечивая условия, чтобы полимерный материал не обдирался об ограничивающие его поверхности.
Свободная поверхность 260b является плоской в поперечном сечении, однако, так как упругий полимерный материал находится между поверхностями, которые параллельны (плита 261 и дискообразная часть 255), напряжения в упругом полимерном материале, местные по отношению к свободной поверхности 260b, автоматически меньше, чем среднее напряжение, поскольку (на градус относительного вращения ограничивающих поверхностей) радиальные внутренние части упругого полимерного материала на свободной поверхности 260b требуется растянуть меньше, чем радиальные наружные части упругого полимерного материала.
На фиг. 15 и 16 показана еще одна конструкция узла кручения 346, которая состоит из пружины кручения 360 в виде спирали с концами пружины 360A и 360B. Конец пружины 360A закрепляется закрепками на дискообразной части 355 плеча 342A.
Узел кручения 346 может быть употреблен в маховике 210 с парными массами вместо узла кручения 246 с крепежными отверстиями 362 на конце пружины 360B, которые используются для крепления пружины 360B к главной корпусной плите 215 с помощью болтов или закрепок. Заметим, что набивка 264 и плечо 242B также необходимы для каждого узла кручения 346.
Следует отметить, что пружина кручения 360 подвергается аксиальному кручению, то есть нагрузка кручения получается в результате относительного вращения компонентов (концов пружины 360A и 360B), которые располагаются аксиально на расстоянии друг от друга относительно их оси вращения. В альтернативной конструкции спиральная пружина кручения (например, пружина типа часовой) может быть установлена в положение радиального кручения, т о есть нагрузка кручения может возникать с помощью относительного вращения компонентов, которые расположены на расстоянии друг от друга радиально относительно их оси вращения.
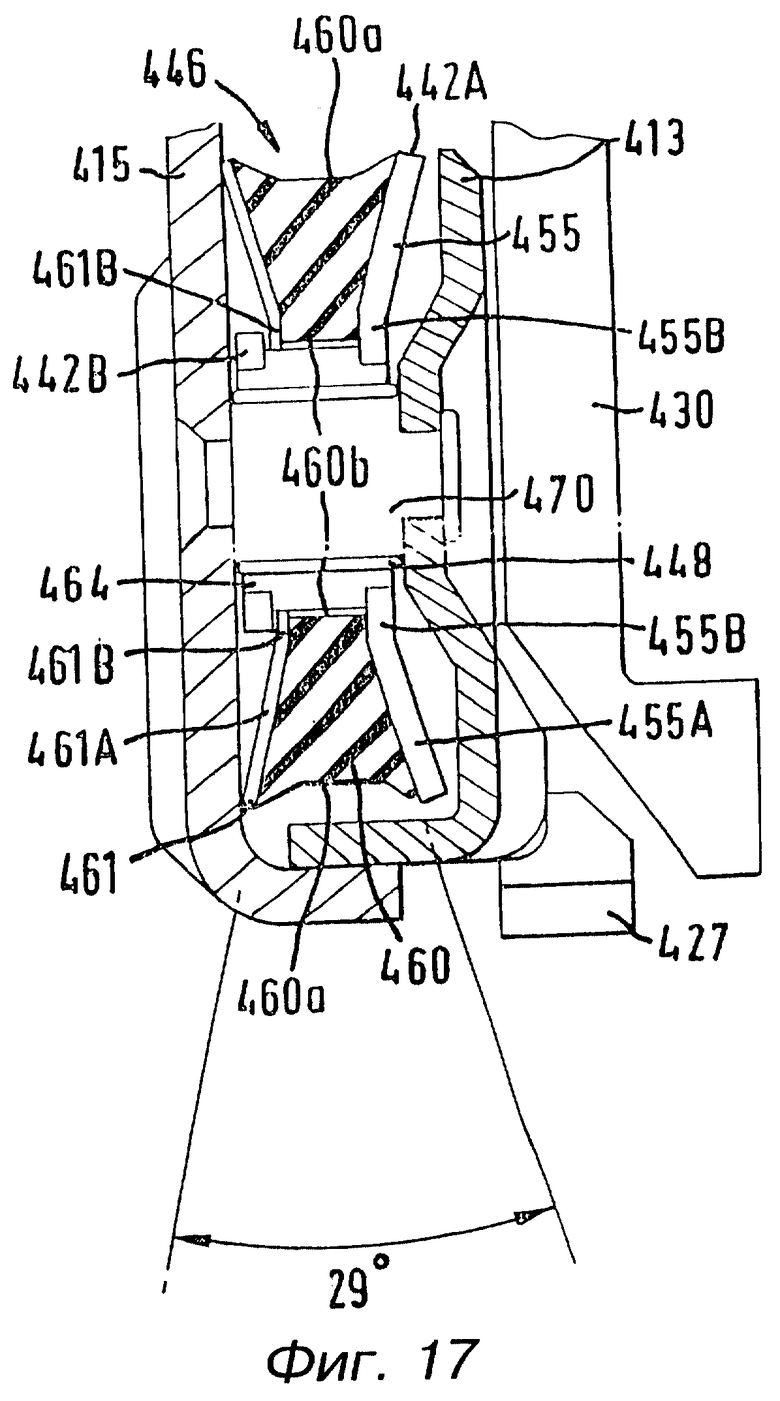
На фиг. 17 показана еще одна модифицированная конструкция узла кручения 446, в которой упругий полимерный материал 460 ограничивается тарелкообразными частями 461A и 455A плиты 461 и плеча 442A соответственно. Радиально ближние к центру части 461B и 455B плиты 461 и плеча 442A располагаются ближе друг к другу, чем радиально удаленные части 461A и 455A. Это обеспечивает более компактную конструкцию с более равномерным нагружением упругого полимерного материала, а также увеличивает срок службы. Отметим что компоненты, которые выполняют ту же самую функцию, что и аналогичные компоненты в маховике 210 с парными массами, имеют номера на 200 больше. Заклепки 470 заменили втулку 270 и болты 271.
Следует также отметить, что свободная поверхность 460a является вогнутой в поперечном сечении, для того чтобы локально снизить напряжения аналогично свободной поверхности 260a.
Плита 461 и плечо 442A имеют короткие части 461B и 455B соответственно, которые параллельны, то есть углы между ограничивающими поверхностями упругого полимерного материала в радиально ближней к центру части (в этом случае нуль градусов) меньше, чем углы между ограничивающими поверхностями упругого эластичного материала в радиально удаленной части (в этом случае 29 градусов). По всей этой параллельной секции напряжения в упругом полимерном материале снижаются по направлению к оси узла кручения таким же образом, как напряжения в упругом полимерном материале 260. Следовательно, напряжения в упругом полимерном материале 460, локальные по отношению к свободной поверхности 460B, ниже, чем среднее напряжение.
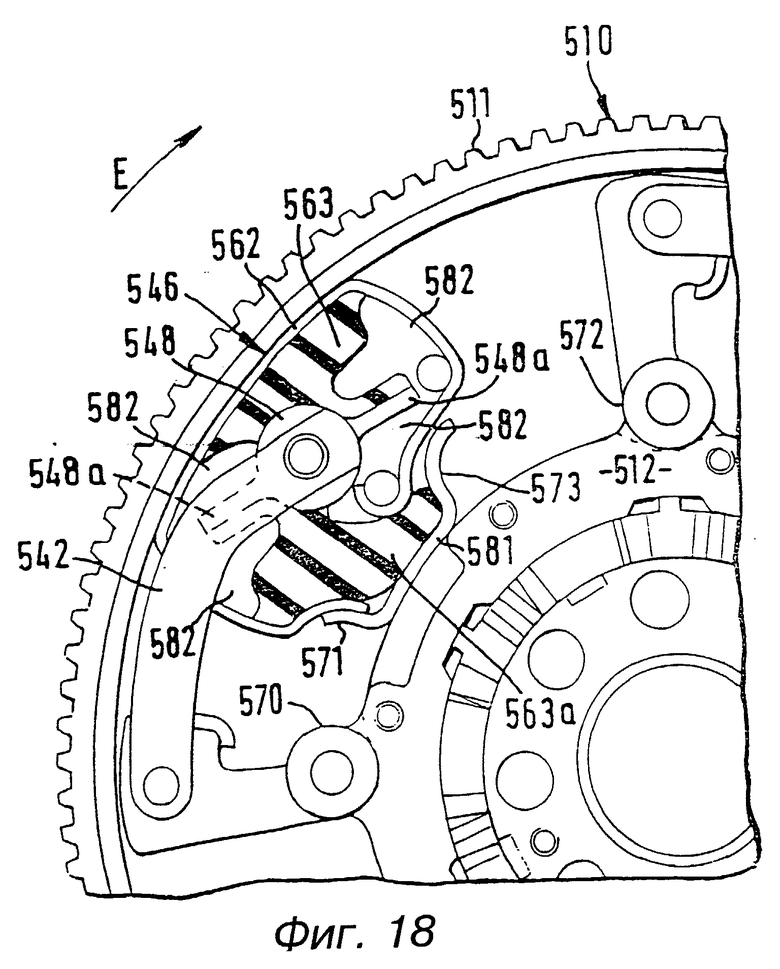
На фиг. 18 и 19 показана альтернативная конструкция узла вращения 546 с компонентами, которые выполняют ту же самую функцию, что и аналогичные компоненты в маховике 10 с парными массами на фиг. 1, но с нумерацией на 500 больше. Следует отметить, что:
a) маховик с парными массами 510 вращается по часовой стрелке, как показывает стрелка E на фиг. 18 и 19;
b) втулка 548 имеет две лопасти 548a;
c) пространство между обшивкой 562 и втулкой имеет пустоты 582;
d) обшивка 562 имеет отверстие, через которое выталкивается часть упругого полимерного материала;
e) предусматривается башмак 581, который может вращаться на ограниченное расстояние по отношению к обеим маховиковым массам.
Действие данного маховика с парными массами аналогично действию маховика 10 с парными массами.
Упругий полимерный материал оказывает противодействие путем радиального сдвига небольшим величинам относительного вращения маховиковых масс относительно геометрически нейтральной позиции при прямом или обратном движении транспортного средства.
Большие величины относительного вращения в прямом или обратном направлениях будут вызывать дальнейший сдвиг и приводить деталь 563b в контакт с частями гибкого полимерного материала 563c и 563d (см. фиг. 19), приводя все эти элементы с состояние сжатия.
Сжатие части 563d также заставит (путем сжатия части 563a) часть 571 башмака нажимать на соединение с маховиковой массой 512 и создавать трение с частью маховиковой массы 512.
Деформация сжатия частей 563b и 563d в сочетании с трением, создаваемым башмаком 581, дает эффект увеличения крутящего момента, требуемого для вращения маховиковых масс вслед за заранее заданной величиной относительного вращения.
На фиг. 19 показан маховик с парными массами в позиции полного хода в направлении движения (то есть в противоположность остановкам в направлении движения) и следует отметить, что в этой позиции башмак 581 толкается опорой 572 и вращается относительно маховика 511, еще больше сжимая часть 563 по сравнению с позицией полного обратного хода (не показана), чтобы создать еще больше сопротивление относительному вращению маховиковых масс.
В следующей модификации конструкции, показанной на фиг. 18 и 19, башмак мог бы быть сконструирован так, чтобы оказывать еще большее давление на часть упругого полимерного материала на полном ходу в обратном направлении. В качестве альтернативного варианта башмак не оказывает дальнейшего давления ни на какую часть упругого полимерного материала на полном ходу в прямом и обратном направлениях.
Следует отметить, что варианты узла кручения, показанные на фиг. 12 и 17, подвергаются аксиальному сдвигу, а узел кручения, показанный на фиг. 18 и 19, подвергается радиальному сдвигу. Все эти узлы кручения могут легко заменяться на месте на узел кручения 46 и могут легко конструироваться с получением любых примерных характеристик, показанных на фиг. 4, или других характеристик узла кручения, которые не показаны.
Очевидно, что любые характеристики узлов кручения на фиг. 4 (или характеристики любых других узлов кручения, которые не показаны) могут сочетаться с любыми характеристиками рычагов на фиг. 5 и 9 (или с любыми другими характеристиками рычагов, которые не показаны), и любая позиция конечной остановки движения в прямом направлении и любая позиция конечной остановки движения в обратном направлении обеспечивается характеристикой маховика, подходящей для конкретной конструкции.



Изобретение относится к конструкции маховика с парными массами, предназначенного для передачи крутящего момента и поглощения ими компенсации вибраций при вращении, которые могут возникнуть в узле трансмиссии транспортного средства. Маховик содержит две коаксиально расположенные массы, установленные с ограничением их углового вращения относительно друг друга, и ряд рычагов, взаимосвязанных с двумя упомянутыми массами, при этом каждый рычаг имеет первое звено, соединенное через ось вращения с одной массой маховика, и второе звено, присоединенное через ось вращения к другой массе, причем оба звена соединены между собой осью вращения. Осевое соединение по крайней мере одного звена с соответствующей ему массой включает в себя гибкое звено для уменьшения относительного вращения указанных масс маховика. Технический результат - расширение арсенала существующих маховиков. 33 з.п. ф-лы, 20 ил.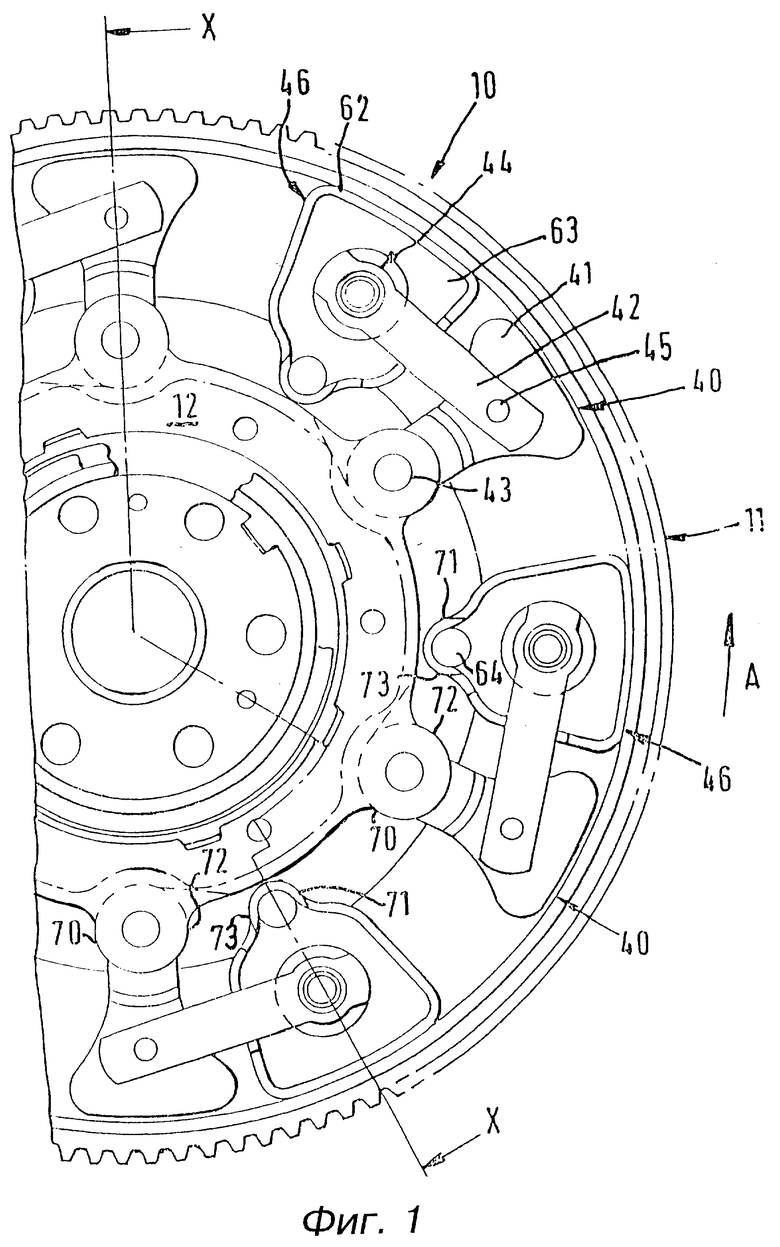
Приоритеты по пунктам:
20.08.94 по пп.1, 2, 4, 6 и 7;
27.05.95 по пп.3, 5, 8 - 34.
| СИСТЕМА БАКТЕРИАЛЬНОЙ ОЧИСТКИ И СБОРА ВОДЫ | 2002 |
|
RU2254906C2 |
| Устройство для усталостных испытаний | 1985 |
|
SU1295286A1 |
| Гаситель крутильных колебаний | 1972 |
|
SU439651A1 |
| Роторная мельница | 1980 |
|
SU939074A1 |
| Демпфер вязкого трения | 1978 |
|
SU691628A1 |
