Предлагаемый стенд относится к учебной технике и может быть использован для исследования параметров движения самоходных средств в процессе обучения студентов соответствующих специальностей.
Известны способы и устройства определения параметров движения транспортных средств, например способ определения тормозного пути, описанный в авторском свидетельстве СССР №1737846, МПК В 60 Q 1/44, заключающийся в том, что информацию о движении преобразовывают в скорость в виде первой последовательности импульсов, а интервалы между упомянутыми импульсами заполняют импульсами второй последовательности с более высокой частотой, запоминают и путем сравнения количества импульсов, запомненных в предыдущем и последующем интервалах между импульсами первой последовательности, определяют знак ускорения, по которому формируют и запоминают сигнал "Начало торможения", и с этого момента заполняют счетчик-сумматор импульсами первой последовательности, а результат отображают на индикации.
Недостатком данного способа и устройства является малая точность определения тормозного пути в условиях юза, когда информация о движении транспортного средства отсутствует, и невозможность использования в учебных целях из-за больших временных и материальных затрат.
Известно устройство определения тормозного пути транспортного средства, описанное в Патенте РФ №2157517, МПК G 01 М 17/007, которое содержит источник информации о движении транспортного средства, формирующий первую последовательность импульсов, генератор постоянной частоты, формирующий вторую последовательность импульсов, блок определения и запоминания сигнала "Начало торможения" (НТ), блок формирования сигнала "Торможение юзом" (ТЮ), инерционный децелерометр, связанный с блоком формирования кодов тормозного пути на участке юза, счетчик-сумматор и блок индикации, связанный с выходом счетчика-сумматора, который своими входами связан с выходами блока формирования сигнала ТЮ, с выходом и входом блока определения и запоминания сигнала НТ, вход которого подключен к первому входу блока формирования сигнала ТЮ и к выходу источника информации о движении транспортного средства, формирующего первую последовательность импульсов, а генератор постоянной частоты связан со вторым входом блока формирования сигнала ТЮ, при этом выход блока формирования кода тормозного пути на участке юза подключен к пятому входу счетчика-сумматора. Это устройство принято за прототип.
Оно имеет следующие недостатки.
1. При использовании его для исследования параметров тормозной системы необходимо реальное транспортное средство, снабженное источником информации о его движении, и децелерометр с блоком формирования кода тормозного пути на участке юза.
2. При использовании его для исследования параметров тормозной системы по тормозному пути необходимы дороги разных типов и разными состояниями покрытий, что возможно при наличие только специальных автодромов.
3. Для проведения исследований необходим профессиональный водитель транспортного средства.
4. Из-за больших затрат материальных средств и времени практически невозможно использовать в учебных целях учебных заведений.
Задача, решаемая в изобретении, заключается в сокращении временных и материальных затрат при исследовании параметров движения транспортных средств в процессе обучения преимущественно в учебных заведениях.
Это достигается тем, что в стенде, содержащем источник информации о движении транспортного средства, формирующий первую последовательность импульсов, генератор постоянной частоты, формирующий вторую последовательность импульсов, блок определения и запоминания сигнала НТ, блок формирования сигнала ТЮ, счетчик-сумматор, децелерометр с блоком формирования кода тормозного пути на участке юза и блок индикации, связанный с выходом счетчика-сумматора, который своими входами связан с выходами блока формирования сигнала ТЮ, с выходом и входом блока определения и запоминания сигнала НТ, вход которого подключен к первому входу блока формирования сигнала ТЮ и к выходу источника информации о движении транспортного средства, формирующего первую последовательность импульсов, а генератор постоянной частоты связан со вторым входом блока формирования сигнала ТЮ, а выход блока формирования кода тормозного пути на участке юза подключен к пятому входу счетчика-сумматора, при этом источник информации о движении транспортного средства, генератор постоянной частоты и децелерометр с блоком формирования кода тормозного пути на участке юза выполнены в виде программных имитационных моделей, расположенные в памяти компьютера и подключенные к соответствующим блокам через выходы компьютера, входы которого связаны с выходом блока определения и запоминания сигнала НТ и выходом счетчика-сумматора.
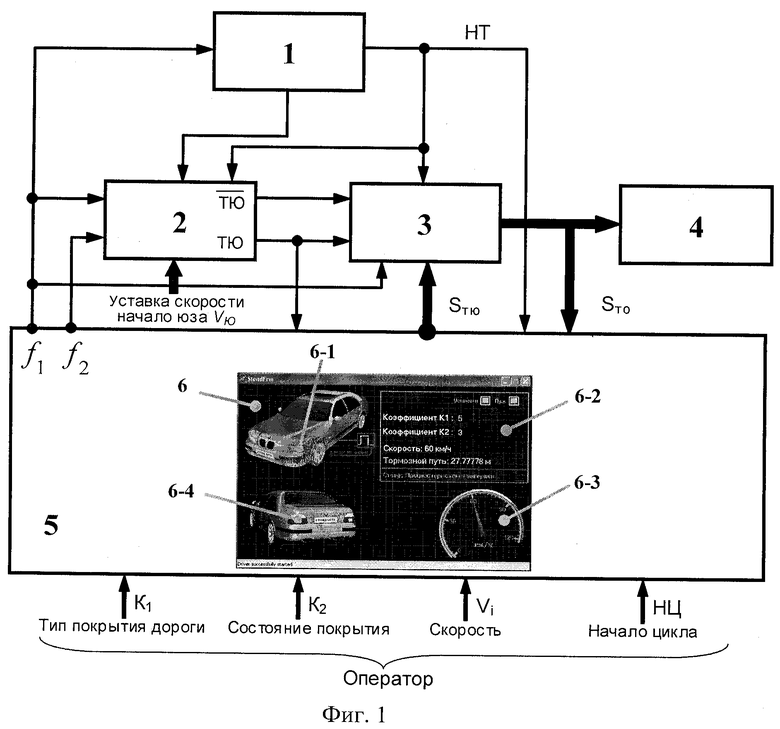
На фиг.1 приведена структурная схема предлагаемого стенда, где обозначены:
1 - блок определения и запоминания сигнала "Начало торможения";
2 - блок формирования сигнала "Торможение юзом" (ТЮ);
3 - счетчик-сумматор;
4 - блок индикации;
5 - компьютер;
6 - экран монитора компьютера;
6-1 - графическое отображение транспортного средства с датчиком движения;
6-2 - поле отображения заданных коэффициентов (К1 - тип покрытия дороги, К2 - состояние покрытия), скорости и тормозного пути;
6-3 - графическое отображение скорости в динамике;
6-4 - графическое отображение транспортного средства со стоп-сигналами.
Выходы ƒ1, ƒ2 компьютера 5 от модели источника информации о движении транспортного средства и от модели генератора постоянной частоты связаны со входом блока 1, входами блока 2 и четвертым входом блока 3. Выход НТ с блока 1 связан с первым входом блока 3, третьим входом блока 2 и первым входом компьютера, второй вход которого связан со вторым выходом блока 2, а информационные выходы компьютера (SТЮ) подключены к пятому входу счетчика-сумматора 3, связанного вторым и третьим входом с выходами блока 2, а выходами с блоком индикации 4 и информационными входами компьютера (SТО).
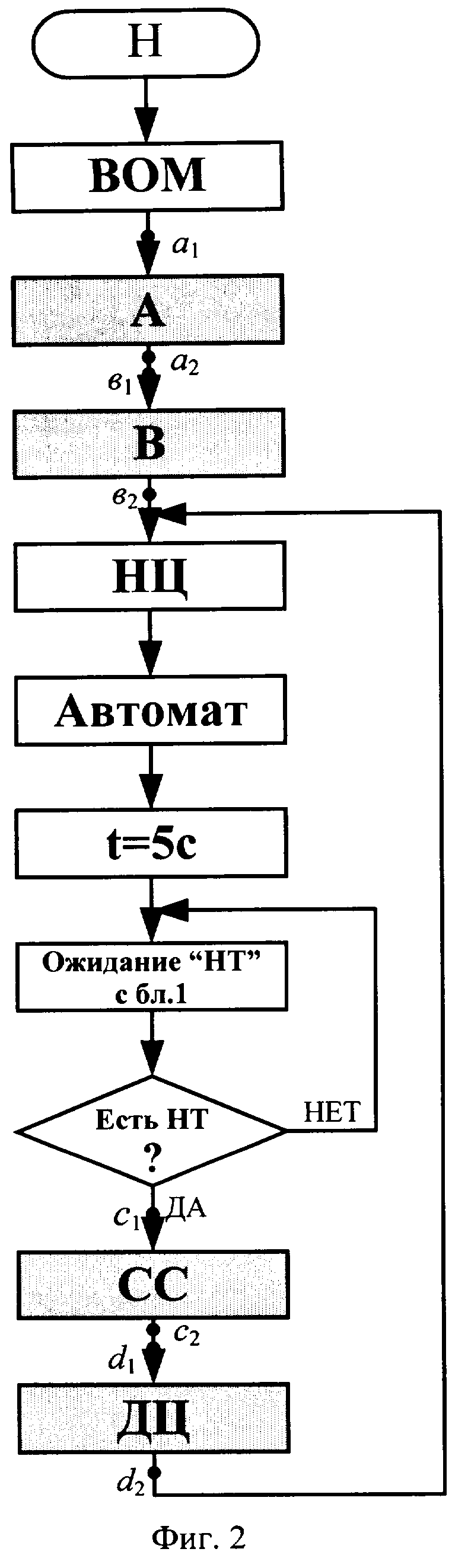
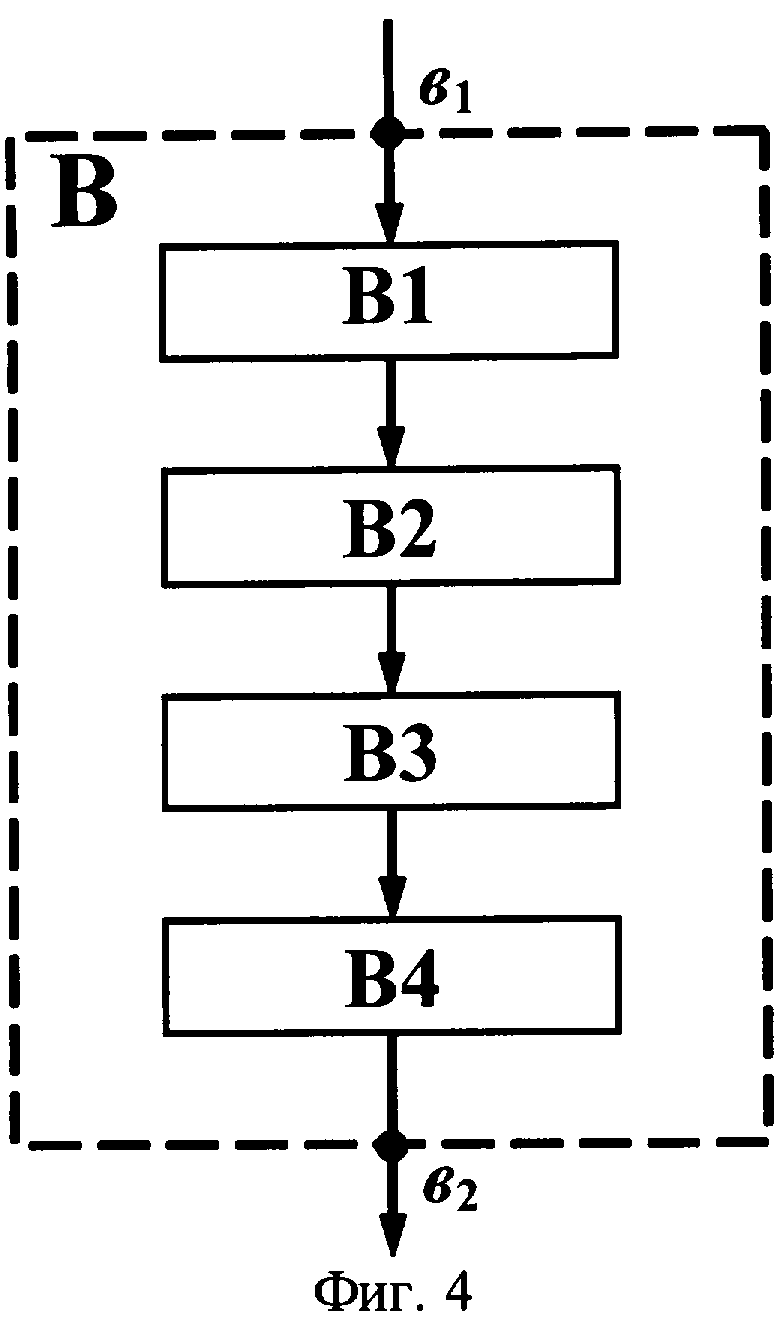
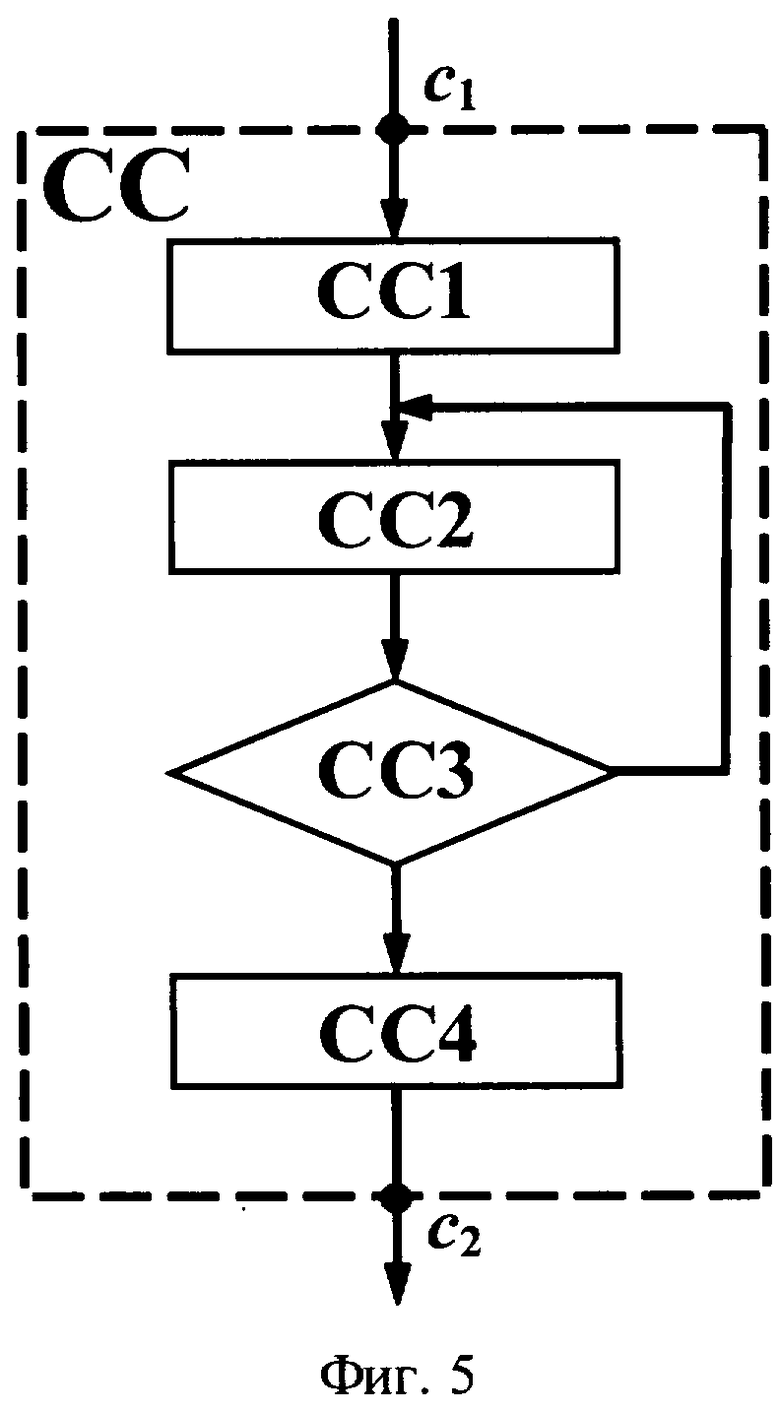
На фиг.2 приведен общий алгоритм работы стенда, на фиг.3 алгоритм работы имитационной модели (подпрограмма А) источника информации о движении транспортного средства, на фиг.4 - алгоритм работы имитационной модели (подпрограмма В) генератора постоянной частоты, на фиг.5 - алгоритм работы имитационной модели (подпрограмма СС) стоп-сигналов, на фиг.6 - алгоритм работы имитационной модели (подпрограмма ДЦ) децелерометра, где обозначены операции:
ВОМ - ввод коэффициентов К1, К2 и скорости Vi с отображением на экране монитора;
А - подпрограмма работы имитационной модели источника информации о движении транспортного средства;
A1 - вычисление заданной скорости с учетом коэффициентов K1 и К2 по формуле
где
Кс - коэффициент продольного сцепления колес для соответствующих K1, К2, задаваемых в виде таблицы из соответствующих справочников;
K1 - типы покрытия дороги, например: цементобетонное, асфальтобетонное, щебеночное с гравием и т.п.;
К2 - состояние покрытия дороги: сухое, мокрое, обледенелое и т.п.
А2 - преобразование вычисленной скорости в частоту ƒ1;
А3 - выдача сигналов с частотой ƒ1 на первый выход компьютера;
А4 - отображение на мониторе компьютера картинки технического средства с датчиком движения;
А5 - формирование в статике изображения прямоугольного импульса фиксированной длительности на мониторе;
А6 - отображение на мониторе компьютера прямоугольного импульса в динамике с частотой, адекватной частоте ƒ1;
B1 - задание времени задержки;
В2 - организация цикла временной задержки;
B3 - формирование сигналов с частотой ƒ2;
B4 - выдача сигналов с частотой ƒ2, на второй выход компьютера;
СС1 - включение стоп-сигналов с отображением на мониторе в режиме мигания и звукового сопровождения;
СС2 - ожидание сигнала конца цикла работы стенда (КЦ);
СС3 - оценка наличия сигнала КЦ;
СС4 - выключение стоп-сигналов из режима мигания и звукового сопровождения;
Д1 - ожидание сигнала ТЮ с блока 2;
Д2 - оценка условия наличия сигнала ТЮ;
Д3 - формирование сигналов частотой ƒ3;
Д4 - вычисление кода тормозного пути (SТЮ) за время t0;
Д5 - выдача кода SТЮ на информационные выходы компьютера;
Д6 - подсчет количества интервалов t0;
Д7 - сравнение вычисленного значения интервалов t0 с заданным значением;
Д8 - ввод общего значения тормозного пути SТО в компьютер через информационные входы;
Д9 - формирование сигнала "конец цикла" (КЦ) работы стенда;
НЦ - начало цикла работы стенда.
Работа стенда заключается в следующем. После включения питания оператор с клавиатуры компьютера 5 вводит следующие данные (фиг.1): значение коэффициентов К1, К2 (например, K1=5 - черное щебеночное покрытие, K2=3 - обледенелое состояние покрытия, при этом KC=0,25), значение скорости Vi, с которой необходимо начинать торможение, и вводит в блок 2 уставное значение скорости VЮ, с которой начинается этап юза. На поле 6-2 экрана монитора 6 компьютера отображаются значения коэффициентов K1, К2 и скорости Vi, на поле экрана 6-3 стрелка устанавливается в положение, показывающее значение скорости Vi. Этим заканчивается операция ВОМ (фиг.2). Начинает работать имитационная модель (подпрограмма А) источника информации о движении транспортного средства и имитационная модель (подпрограмма В) генератора постоянной частоты, отчего на экране монитора отображается контур транспортного средства 6-1 (фиг.1) и сигнал прямоугольной формы в статике.
После ввода оператором команды НЦ стенд переходит в автоматический режим (операция АВТОМАТ фиг.2), отчего на первом и втором выходах компьютера формируются сигналы с частотой ƒ1 и ƒ2, которые поступают на блоки 1, 2, 3. По истечении 5 с начинает уменьшаться частота ƒ1, начинается торможение и на выходе блока 1 формируется сигнал НТ. Сигнал НТ поступает на вход блока 3, тем самым открывая вход для прохождения частоты ƒ1 на счетчик-сумматор, который начинается подсчитывать тормозной путь и отображать на блоке индикации 4. Включается в работу блок 2, в котором происходит сравнение текущей скорости с заданной уставкой VЮ. Сигнал НТ воспринимается компьютером. На экране монитора прямоугольные импульсы начинают двигаться с частотой, адекватной (пропорциональной) ƒ1, начинают мигать стоп-сигналы 6-4 со звуковым сопровождением и начинается поворот стрелки на поле 6-3 в сторону уменьшения угла (скорости). С момента появления НТ выполняется операция СС (фиг.2) и при достижении скорости VЮ блок 2 формирует сигнал ТЮ, который воспринимается компьютером как начало включения имитационной модели децелерометра, начинает выполняться операция ДЦ (подпрограмма ДЦ на фиг.2, 6). Одновременно сигнал ТЮ с блока 2 закрывает поступления импульсов ƒ1 на блок 3 и открывает пятый вход блока 3, на который с модели децелерометра с компьютера 5 поступают коды тормозного пути SТЮ, которые суммируются с предыдущим значением тормозного пути в счетчике-сумматоре 4 и параллельно отображаются на поле 6-2 монитора.
По истечении заданного времени tзад (фиг.6) формируется сигнал конец цикла работы стенда (КЦ), по которому скорость Vi=0, выключаются из работ стоп-сигналы 6-4, прекращается поступление частоты ƒ1 с выхода компьютера, на поле 6-2 отображается общее значение тормозного пути (SТO). Это значение отображается и на блоке индикации 4. Стрелка на поле 6-3 монитора устанавливается в нулевое положение. Стенд готов к новому циклу работы. Изменив значение коэффициентов K1 и К2 и значение скорости Vi, можно получить большое множество значений тормозного пути, по которому рассчитываются другие тормозные характеристики транспортных средств. А если часть тормозного пути юзом определять не по времени (операции Д6, Д7 фиг.6), а задавать специальную траекторию, то количество значений тормозного пути увеличится во много раз и соответственно увеличится количество тормозных характеристик.
Таким образом, введение имитационных программных моделей источника информации о движении транспортного средства, генератора постоянной частоты и децелерометра с блоком формирования кода тормозного пути на участке юза, выполненных в виде подпрограмм, расположенных в памяти компьютера и связанных через входы/выходы компьютера соответствующим образом с остальными блоками, позволяет без использования реальных транспортных средств задавать различные типы дорожных покрытий и состояния покрытий, различные скорости, траектории торможения и наблюдать и фиксировать изменения тормозного пути, по которым рассчитываются тормозные характеристики различных транспортных средств, что позволяет сократить материальные и временные затраты при исследованиях параметров движения транспортных средств и эффективно использовать его в учебных заведениях при изучении ряда дисциплин, связанных с дорожно-транспортными специальностями.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД И СПОСОБ ИССЛЕДОВАНИЯ ДВИЖЕНИЯ РОБОКАРА | 2013 |
|
RU2561405C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2289803C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2342644C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2157517C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2342643C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2404897C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2453822C1 |
| СПОСОБ ВЫБОРА РЕЖИМА ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2450252C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2448853C1 |
| Способ испытания мобильных боевых робототехнических комплексов и стенд для его осуществления | 2016 |
|
RU2630860C1 |


Изобретение относится к области исследования параметров движения самоходных транспортных средств и предназначено для использования в процессе профессионального обучения. Источник информации о движении транспортного средства, генератор постоянной частоты и децелерометр с блоком формирования кода тормозного пути на участке юза выполнены в виде программных имитационных моделей, расположенных в памяти компьютера. Имеются также блок определения и запоминания сигнала “Начало торможения”, блок формирования сигнала “Торможение юзом”, счетчик-сумматор и блок индикации. На стенде задаются различные типы дорожных покрытий и состояния покрытий, различные скорости и траектории торможения. Обеспечивается возможность наблюдения и фиксации изменения тормозного пути для расчета тормозных характеристик транспортных средств. Изобретение позволяет сократить время и материальные затраты на обучение. 6 ил.
Стенд для исследования параметров движения транспортных средств, содержащий источник информации о движении транспортного средства, формирующий первую последовательность импульсов, генератор постоянной частоты, формирующий вторую последовательность импульсов, блок определения и запоминания сигнала “Начало торможения”, блок формирования сигнала “Торможение юзом”, счетчик-сумматор, децелерометр с блоком формирования кода тормозного пути на участке юза и блок индикации, связанный с выходом счетчика-сумматора, который своими четырьмя входами связан с выходами блока формирования сигнала “Торможение юзом”, с выходом и входом блока определения и запоминания сигнала “Начало торможения”, вход которого дополнительно подключен к первому входу блока формирования сигнала “Торможение юзом” и к выходу источника информации, формирующего первую последовательность импульсов, а генератор постоянной частоты связан со вторым входом блока формирования сигнала “Торможение юзом”, другие входы которого связаны с соответствующими выходами блока определения и запоминания сигнала “Начало торможения”, а выход блока формирования кода тормозного пути на участке юза подключен к пятому входу счетчика-сумматора, отличающийся тем, что источник информации о движении транспортного средства, генератор постоянной частоты и децелерометр с блоком формирования кода тормозного пути на участке юза выполнены в виде программных имитационных моделей, расположенных в памяти компьютера, и подключены к соответствующим блокам через выходы компьютера, входы которого связаны с выходом блока определения и запоминания сигнала “Начало торможения”, с одним из выходов блока формирования сигнала “Торможение юзом” и с выходами счетчика-сумматора.
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2157517C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТОРМОЗНОГО ПУТИ АВТОТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2099741C1 |
| Устройство для определения скорости и тормозного пути транспортных средств | 1989 |
|
SU1718258A1 |
| Устройство для определения тормозных и тяговых характеристик колесных машин | 1980 |
|
SU911196A1 |

