Изобретение относится к области машиностроения, а именно к системам управления поворотом гусеничных машин.
Высокий уровень удельных мощностей, установка современных агрегатов системы "двигатель-трансмиссия-ходовая часть" позволяют получить высокие максимальные и средние скорости движения гусеничных машин на местности. Однако реализация технических возможностей, заложенных в конструкцию гусеничных машин, существенно ограничивается их низкой управляемостью, склонностью к заносу, особенно при движении на высоких скоростях. Известные системы управления поворотом гусеничных машин содержат приводы управления и исполнительные механизмы. Для автоматизации управления движением вводятся в системы задающие устройства и блоки автоматики (см. "Автоматические системы транспортных машин" Петров В. А. - М., Машиностроение, 1974 г.). Однако в этих системах задачи по повышению средних скоростей движения решаются созданием автоматов переключения передач, обеспечивающих согласование моментов переключения передач с наиболее экономичными режимами работы двигателя, а также исключение цикличности работы системы. В связи с тем, что значительную часть при движении машины составляет криволинейное движение, одним из путей повышения средней скорости движения является автоматизация управления движением машины в повороте. В связи с этим существует необходимость в разработке системы, обеспечивающей контроль поведения машины при движении в повороте, и при возникновении угрозы потери управления движением автоматически ограничивать скорость и тем самым предотвращать занос.
Основная трудность в разработке такой системы заключается в выборе параметров, по которым бы контролировалось поведение машины при повороте. Искомые параметры должны правильно отражать физическую суть процессов, протекающих при движении машины. Также важное значение имеет простота определения данных параметров, так как это будет определять уровень сложности и надежности работы системы.
Система управления существующих гусеничных машин представляет собой совокупность механизма поворота и приводов управления, с помощью которых водитель осуществляет управление машиной.
За прототип принята система управления поворотом машины ГМ 569А. Данная система содержит гидрообъемно-механическую передачу (ГОМП) и приводы управления ГОМП (Гусеничная машина ГМ-569А и ее модификации ГМ-577А, ГМ-579А, ГМ-567. Техническое описание и инструкция по эксплуатации. М.: Военное издательство, 1987, стр. 28-29). Водитель, воздействуя посредством приводов управления на ГОМП, изменяет режим ее работы и тем самым изменяет направление движения машины. При этом контроль за поведением машины осуществляет водитель.
Целью настоящего изобретения является совершенствование данной системы управления поворотом и обеспечение возможности автоматического контроля поведения машины при повороте и снижения скорости движения при возникновении опасности потери управления движением.
В результате проведенных теоретических исследований определено, что величины теоретической угловой скорости поворота машины, определяемой скоростями вращения гусениц, и фактической угловой скорости, которая отличается от теоретической за счет скольжения гусениц, при достижении скорости движения гусеничной машины предельной по управляемости близки по значению друг к другу. То есть при возникновении угрозы заноса отношение этих скоростей стремится к единице.
Полученные результаты можно использовать для разработки системы автоматического управления движением машины в повороте (предотвращения потери управления движением), так как эти параметры связаны с характеристиками управляемого движения и легко измеряемы современными средствами. Замеряя скорости вращения гусениц, можно рассчитать по ним теоретическую угловую скорость. Фактическая угловая скорость определяется с помощью датчика угловой скорости. Сравнивая эти скорости можно прогнозировать момент возникновения заноса и в случае появления угрозы потери управления движением автоматически ограничивать скорость движения.
Автоматическая система управления поворотом (см. чертеж) состоит из датчиков 1 и 2 частоты вращения гусениц правого и левого бортов, блока конструкционных параметров 3, датчика угловой скорости 4 поворота гусеничной машины, блока вычисления теоретической угловой скорости поворота машины 5, блока деления 6, компаратора 7, блока опорного сигнала 8, исполнительного механизма 9.
Предлагаемая система управления поворотом работает следующим образом. При движении машины сигналы от датчиков частоты вращения 1 и 2 гусениц правого и левого бортов поступают в блок 5 вычисления теоретической угловой скорости поворота гусеничной машины и затем в блок деления 6. В этот же блок поступает сигнал от датчика 7 угловой скорости поворота машины, где рассчитывается отношение значений теоретической и фактической угловых скоростей поворота машины. Далее сигнал поступает в компаратор 7, где сравнивается с опорным сигналом, поступающим из блока опорного сигнала 8. Если величина сигнала из блока деления равна или меньше величины опорного сигнала, то компаратор выдает сигнал управления на исполнительный механизм 9 привода изменения режима работы двигателя, уменьшающего частоту вращения вала двигателя до тех пор, пока не пропадет сигнал от компаратора. Блок конструкционных параметров 3 служит для ввода конструкционных параметров машины, необходимых для расчета теоретической угловой скорости поворота машины.
Заявляемое изобретение позволит создать простую конструкцию системы автоматического управления поворотом и повысить ее надежность.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ МАСТЕРСТВА ВОЖДЕНИЯ ОПЕРАТОРА БРОНИРОВАННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 1997 |
|
RU2123724C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ДВИЖЕНИЯ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2011 |
|
RU2480361C1 |
| РАБОЧЕЕ МЕСТО ОПЕРАТОРА ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 1998 |
|
RU2146797C1 |
| РАБОЧЕЕ МЕСТО ОПЕРАТОРА ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 1998 |
|
RU2146796C1 |
| ТАНКОВАЯ СИЛОВАЯ УСТАНОВКА | 1998 |
|
RU2137617C1 |
| СИСТЕМА КОЛЛЕКТИВНОЙ ЗАЩИТЫ ТАНКА | 1998 |
|
RU2131578C1 |
| ТРЕНАЖЕР ВОЖДЕНИЯ | 1998 |
|
RU2150753C1 |
| СПОСОБ БУКСИРОВАНИЯ ТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2121937C1 |
| ТАНКОВЫЙ ТРЕНАЖЕР ОБУЧЕНИЯ ВОЖДЕНИЮ | 1998 |
|
RU2138079C1 |
| СПОСОБ ВИЗИРОВАНИЯ | 1994 |
|
RU2090823C1 |
Изобретение относится к технике комбинированного управления приводами транспортных средств на гусеничном ходу. Предложенная автоматическая система управления содержит гидрообъемно-механическую передачу и исполнительные приводы управления этой передачей. Кроме того, в ее состав входят датчики частот вращения гусениц правого и левого бортов, блок конструктивных параметров, соединенные с блоком вычисления теоретической угловой скорости поворота машины, который вместе с датчиком угловой скорости через блок деления соединен с компаратором. Последний сравнивает сигнал на выходе блока деления с опорным сигналом и воздействует соответствующим образом на исполнительный привод. Система контролирует поведение машины при поворотах и в случае возникновения угрозы потери управления движением автоматически ограничивает скорость, предотвращая занос. За счет упрощения задачи оценки водителем соответствия дорожных условий возможностям машины обеспечивается возможность сведения к минимуму потерь средней скорости движения. 1 ил.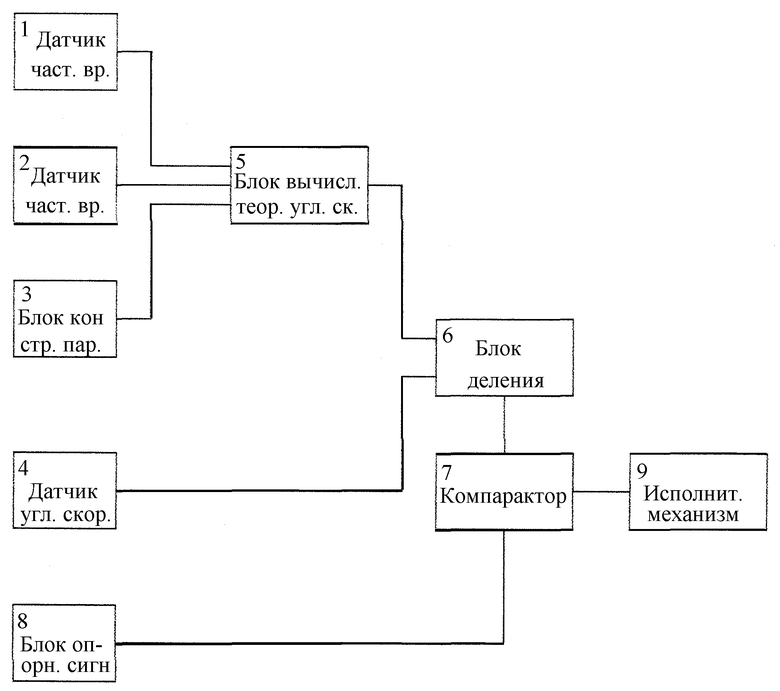
Автоматическая система управления поворотом гусеничной машины, содержащая гидрообъемно-механическую передачу и исполнительные приводы управления этой передачей, отличающаяся тем, что содержит датчики частот вращения гусениц правого и левого бортов, блок конструктивных параметров, соединенные с блоком вычисления теоретической угловой скорости поворота машины, который через блок деления соединен с компаратором, датчик угловой скорости поворота машины, также имеющий электрическую связь через блок деления с компаратором, и блок опорного сигнала, соединенный с компаратором, имеющим электрическую связь с исполнительным приводом.
| СУРДИНА ДЛЯ МЕДНЫХ ДУХОВЫХ ИНСТРУМЕНТОВ | 1923 |
|
SU569A1 |
| Техническое описание и инструкция по эксплуатации | |||
| - М.: Военное издательство, 1987, с.28, 29 | |||
| Устройство управления гидрообъемной трансмиссией | 1989 |
|
SU1756181A1 |
| Устройство управления гидрообъемной трансмиссией транспортной машины с бортовым поворотом | 1987 |
|
SU1449377A1 |
