Изобретение относится к области систем управления, более конкретно к устройствам определения взлетной массы самолета.
Известно устройство для определения взлетной массы самолета (патент США N 4110605), содержащее измеритель воздушных параметров, акселерометр продольного направления, акселерометр вертикального направления, измеритель положения закрылков, измеритель положения стабилизатора, измеритель мощности силовых установок, вычислитель, причем вычислитель состоит из подвычислителя определения импульса, подвычислителя определения функций управления, подвычислителя определения массы, а также делитель, при этом 1 выход измерителя воздушных параметров связан с 1 входом подвычислителя определения массы, 1 входом вычислителя определения импульса, 2 входом подвычислителя определения функций управления, 2 выход измерителя воздушных сигналов связан со 2 входом подвычислителя определения массы и со 2 входом подвычислителя определения импульса, выход акселерометра продольного направления связан с 3 входом подвычислителя определения массы, выход акселерометра вертикального направления связан с 1 входом подвычислителя определения функций управления, выход измерителя положения закрылков связан с 3 входом подвычислителя определения функций управления, выход измерителя мощности силовых установок связан с 3 входом подвычислителя определения импульса, а выход подвычислителя определения импульса связан с 1 входом делителя, выход делителя связан с 5 входом подвычислителя определения функций управления, при этом 1 выход подвычислителя определения функций управления связан с 4 входом подвычислителя определения массы, а выход подвычислителя определения массы связан со 2 входом делителя, а также с индикатором.
Недостатками указанного устройства являются:
отсутствие учета влияния величины и направления ветра на параметры движения самолета;
низкая чувствительность акселерометров при измерении ускорений;
инерционность выполнения измерений акселерометрами;
существенные помехи на входе акселерометров вследствие вибраций при движении самолета по взлетно-посадочной полосе, искажающие сигнал на выходе акселерометра;
необходимость применения гиростабилизированных платформ для размещения акселерометров или проведения других специальных мероприятий с целью их точной ориентации по строительным осям самолета, что значительно удорожает общую стоимость устройства для определения взлетной массы самолета.
Следствием указанных выше недостатков является невысокая точность измерений с помощью данного устройства.
Техническим результатом изобретения является повышение точности определения массы самолета более дешевыми средствами.
Указанный технический результат достигается тем, что в устройство определения взлетной массы самолета, содержащее измеритель воздушных сигналов, измеритель параметров силовых установок, измеритель положения механизации крыла, измеритель положения поверхностей управления и вычислитель, введены пульт ввода параметров, измеритель угла тангажа, измеритель угла атаки, запоминающие устройства, логические устройства, сумматор, индикатор и регистратор, при этом выход пульта ввода параметров связан с первым входом вычислителя, первый выход измерителя воздушных сигналов соединен со входом первого запоминающего устройства и с третьим входом первого логического устройства, второй выход измерителя воздушных сигналов связан со вторым входом вычислителя, третий выход измерителя воздушных сигналов соединен с измерителем параметров силовых установок, выход которого соединен с третьим входом вычислителя, выход измерителя положения механизации крыла соединен с первым входом второго запоминающего устройства, выход измерителя положения поверхностей управления соединен со вторым входом второго запоминающего устройства, причем выход измерителя угла тангажа соединен с первым входом первого логического устройства, а выход измерителя угла атаки соединен со вторым входом первого логического устройства, выход которого связан с третьим входом второго запоминающего устройства, выход которого соединен с четвертым входом вычислителя, при этом выход вычислителя соединен со входом третьего запоминающего устройства, выход первого запоминающего устройства связан с первым входом сумматора, а выход третьего запоминающего устройства соединен со вторым входом сумматора, выход которого соединен с первым входом второго логического устройства и входом четвертого запоминающего устройства, выход которого соединен со вторым входом второго логического устройства, а выход последнего соединен со входами индикатора и регистратора.
Данное техническое решение содержит новую совокупность существенных признаков в отличительной части патентной формулы:
в устройство дополнительно включен пульт для ввода в вычислитель значения скорости и направления ветра, угла наклона взлетно-посадочной полосы, величины коэффициента трения качения шасси и величины ускорения свободного падения на взлетно-посадочной полосе;
в устройство дополнительно включен измеритель угла атаки на больших скоростях движения самолета для определения аэродинамических коэффициентов при наличии ветрового воздействия и эффекта "воздушной подушки";
в устройство дополнительно включен измеритель угла тангажа для определения аэродинамических коэффициентов на малых скоростях, когда показания измерителя угла атаки нестабильны, действие эффекта "воздушной подушки" не велико и угол атаки можно принять равным углу тангажа;
в устройство дополнительно включено логическое устройство 1, которое осуществляет переключение сигнала об угле атаки с датчика угла тангажа на датчик угла атаки в зависимости от скорости движения самолета;
дополнительно включено запоминающее устройство 1 для хранения значений измеренной скорости;
дополнительно включено запоминающее устройство 2 для хранения аэродинамических коэффициентов самолета, величины которых пропорциональны углу атаки;
дополнительно включены запоминающие устройства 3 и 4 для хранения промежуточных результатов вычислений;
в устройство дополнительно включен регистратор, позволяющий анализировать на земле исправность устройства и величину взлетной массы.
Настоящее техническое решение соответствует критерию "промышленная применимость". Данное устройство может применяться в авиакомпаниях и экипажами воздушных судов для определения взлетной массы и контроля соответствия техники пилотирования эксплуатационным ограничениям.
Материалы заявки содержат достаточное и необходимое количество сведений, которые с полной ясностью раскрывают возможность реализации изобретения.
Физическая сущность предлагаемого технического решения, а именно повышение точности определения массы самолета заключается в следующем. Движение самолета по взлетно-посадочной полосе (ВПП) происходит под действием суммы сил, представленных на фиг. 1, и подчиняется второму закону Ньютона
где m - масса самолета;
V - скорость движения самолета;
P - суммарная тяга силовых установок;
αcу - угол между средней аэродинамической хордой крыла и вектором тяги силовой установки;
G - вес самолета;
ϕвпп - угол наклона взлетно-посадочной полосы, принимаемый отрицательным, если самолет разбегается под уклон, и положительным в противоположном случае;
Xа - аэродинамическая сила лобового сопротивления;
Fтр - сила трения.
Сила тренья Fтр может быть представлена в виде
Fтр = fтр(Gcosϕвпп-Ya-Psinαcу), (2)
где fтр - коэффициент трения;
Yа - аэродинамическая подъемная сила.
Суммарная мощность силовых установок P для реактивных двигателей является известной функцией частоты вращения турбины, температуры газов за турбиной, скорости самолета, атмосферного давления, температуры окружающего воздуха, которые могут быть определены. Сила лобового сопротивления Xа и аэродинамическая подъемная сила Yа являются известными функциями атмосферного давления, температуры воздуха, угла атаки, выпущенной механизации крыла, отклоненных рулевых поверхностей, скорости и направления ветра, а также выпущенного шасси, величину которых можно определить. Коэффициент трения fтр может быть определен путем замера характеристик взлетно-посадочной полосы непосредственно перед взлетом. Ускорение силы тяжести g является известной величиной для каждого аэродрома взлета. Задаваясь различными значениями массы и решая уравнение (1), можно получить семейство расчетных зависимостей скорости от времени Vрас(tj,mi) при mi = mi0-m(P,tj). Реальная зависимость Vизм(tj) может быть с высокой точностью измерена либо с помощью датчика воздушной скорости, либо с помощью датчика скорости вращения колес самолета.
Решением дифференциального уравнения может служить соотношение
где Vизм(tj) - величина скорости, измеренная в соответствующие моменты времени tj;
Vрас(tj, mi) - расчетная величина скорости, рассчитанная для соответствующих моментов времени tj при прогнозируемых взлетных массах mi;
Vвет скорость ветра;
ϕвeт - угол между направлением ветра и взлетной полосой;
mi - прогнозируемая масса в моменты времени tj;
P - тяга силовых установок;
αcу - угол между средней аэродинамической хордой крыла и вектором тяги силовой установки;
ϕвпп - угол наклона взлетно-посадочной полосы;
Xа - аэродинамическая сила лобового сопротивления;
Yа - аэродинамическая подъемная сила;
fтр - коэффициент трения.
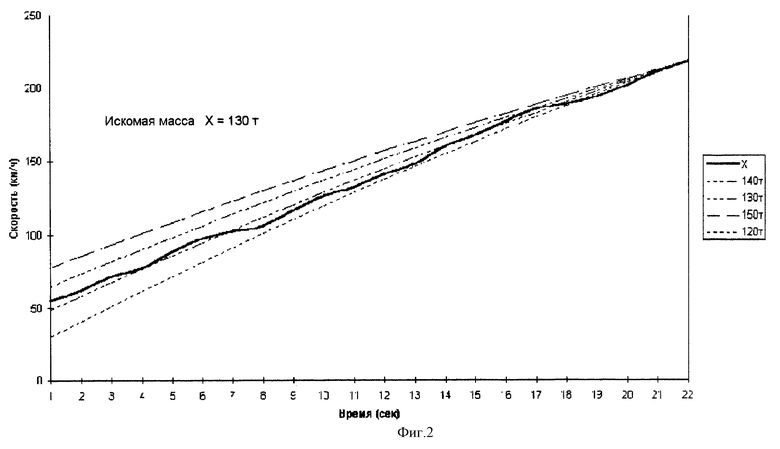
В результате решения уравнения (3), будет получено семейство зависимостей скорости для различных взлетных масс самолета (фиг. 2). Для каждой взлетной массы находится сумма квадратов разностей между скоростью измеренной и рассчитанной. Та масса, при которой эта сумма будет минимальной, и будет искомой
где M - взлетная масса; - перебор значений функции при изменении прогнозируемой массы от минимальной до максимальной;
- перебор значений функции при изменении прогнозируемой массы от минимальной до максимальной;
tmin - время начала регистрации движения самолета;
tmax - время окончания регистрации движения самолета.
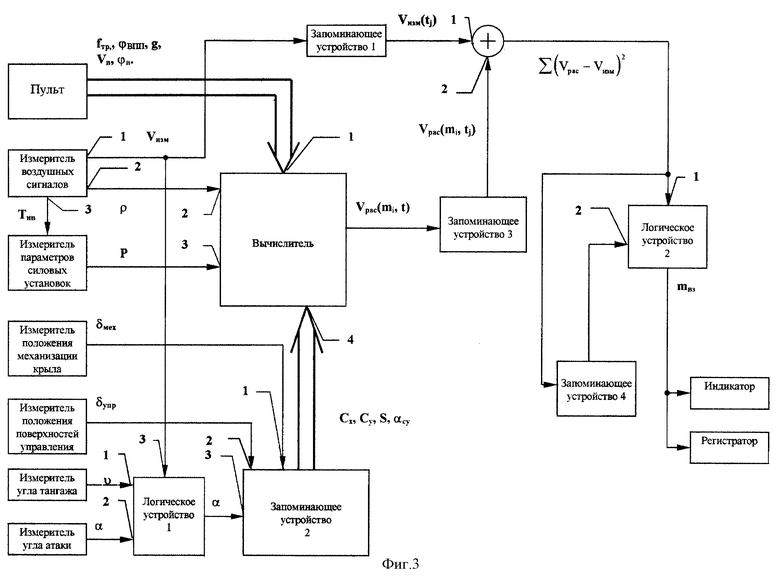
Реализация данного способа осуществляется устройством, включающим в себя (фиг. 3): пульт управления, измеритель воздушных сигналов, измеритель параметров силовых установок, измеритель положения механизации крыла, измеритель положения поверхностей управления, измеритель углов тангажа, измеритель угла атаки, вычислителя, запоминающих устройств 1, 2, 3 и 4, логических устройств 1 и 2, сумматора, индикатора и регистратора.
Работа устройства заключается в следующем. В процессе разбега по ВПП измеритель воздушных сигналов через промежутки времени Δt = ti+1-ti измеряет скорость Vизм(tj). Массив ее значений запоминается запоминающим устройством 1. С измерителя углов атаки и измерителя угла тангажа на вход логического устройства поступают сигналы угла атаки и тангажа. В зависимости от скорости движения самолета, которая измеряется системой воздушных сигналов, на вход запоминающего устройства 2 подается угол атаки. В запоминающем устройстве 2 хранятся значения аэродинамических коэффициентов, пропорциональных углу атаки. Аэродинамические коэффициенты поступают на вход вычислителя совместно с остальными коэффициентами уравнения (3) с пульта, измерителя воздушных сигналов и измерителя параметров силовых установок. Массив рассчитанных значений скорости при различных прогнозируемых массах m0i в те же моменты времени tj запоминается запоминающим устройством 3. Для каждого значения взлетной массы m0i рассчитывается сумма квадратов разностей рассчитанной и измеренной скорости. Величина этой суммы запоминается запоминающим устройством 4. Логическое устройство 2 определяет минимальную сумму квадрата разности скоростей и массу m0i, при которой эта минимальная сумма была достигнута в соответствии с уравнением (4). Определенная таким образом величина взлетной массы выводится на индикатор и документируется регистратором.
Шаг изменения масс Δm = mi+1-mi и соответственно количество решений уравнения (3) могут быть выбраны для каждого конкретного типа самолета в зависимости от его геометрических размеров и особенностей в технике пилотирования.
Моделирование устройства с использованием цифровой вычислительной машины для самолета Ил-76 дало положительные результаты. Семейство графиков скоростей, рассчитанных для взлетных масс 120 т, 130 т, 140 т, 150 т, и скорость, зарегистрированную датчиком скорости ДАС системы объективного контроля МСРП-64 при разбеге с взлетным весом 130 т, представлены на фиг. 2.
Данный способ и устройство существенно расширяют возможности для контроля взлетной массы самолета, что значительно повысит безопасность выполнения полетов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЗЛЕТНОЙ МАССЫ САМОЛЕТА | 2001 |
|
RU2196967C2 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА НАГРУЗКИ САМОЛЕТА | 2003 |
|
RU2260179C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2008 |
|
RU2435707C2 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| СПОСОБ И УСТРОЙСТВО ВЫЧИСЛЕНИЯ ТЕКУЩЕГО ЗНАЧЕНИЯ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2663315C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ТЯГИ ДВИГАТЕЛЕЙ САМОЛЕТА | 2015 |
|
RU2582492C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
Изобретение относится к области систем управления. Устройство содержит пульт ввода параметров, измеритель воздушных сигналов, измеритель параметров силовых установок, измеритель положения механизации крыла, измеритель положения поверхностей управления, измеритель угла тангажа, измеритель угла атаки, вычислитель, четыре запоминающих и два логических устройства, сумматор, индикатор и регистратор. Ввзлетную массу определяют путем сравнения показаний скорости, измеренной системой воздушных сигналов, и семейства рассчитанных скоростей для различных величин взлетной массы. Технический результат - повышение точности определения массы самолета более дешевыми средствами. 3 ил.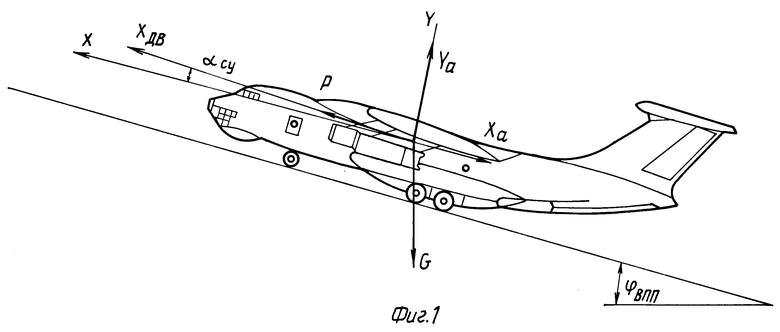
Устройство определения взлетной массы самолета, содержащее измеритель воздушных сигналов, измеритель параметров силовых установок, измеритель положения механизации крыла, измеритель положения поверхностей управления и вычислитель, отличающееся тем, что в него введены пульт ввода параметров, измеритель угла тангажа, измеритель угла атаки, запоминающие устройства, логические устройства, сумматор, индикатор и регистратор, при этом выход пульта ввода параметров связан с первым входом вычислителя, первый выход измерителя воздушных сигналов соединен со входом первого запоминающего устройства и с третьим входом первого логического устройства, второй выход измерителя воздушных сигналов связан со вторым входом вычислителя, третий выход измерителя воздушных сигналов соединен с измерителем параметров силовых установок, выход которого соединен с третьим входом вычислителя, выход измерителя положения механизации крыла соединен с первым входом второго запоминающего устройства, выход измерителя положения поверхностей управления соединен со вторым входом второго запоминающего устройства, причем выход измерителя угла тангажа соединен с первым входом первого логического устройства, а выход измерителя угла атаки соединен со вторым входом первого логического устройства, выход которого связан с третьим входом второго запоминающего устройства, выход которого соединен с четвертым входом вычислителя, при этом выход вычислителя соединен со входом третьего запоминающего устройства, выход первого запоминающего устройства связан с первым входом сумматора, а выход третьего запоминающего устройства соединен со вторым входом сумматора, выход которого соединен с первым входом второго логического устройства и входом четвертого запоминающего устройства, выход которого соединен со вторым входом второго логического устройства, а выход последнего соединен со входами индикатора и регистратора.
| US 4110605 A, 03.09.1978 | |||
| RU 94039253 A1, 27.03.1997 | |||
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ЖИДКОСТИ | 2008 |
|
RU2381998C1 |
| Приспособление для проточки опорных буртиков овальных лючков в коллекторах паровых котлов | 1948 |
|
SU82663A1 |

