Изобретение относится к усовершенствованному погрузчику поддонов, содержащему вертикальную раму и два горизонтальных подъемных вилочных элемента, выступающих из рамы и выполненных с возможностью вертикального перемещения совместно с указанной рамой с помощью подъемного механизма, встроенного в подъемник поддонов. Каждый вилочный элемент снабжен на свободном конце, противоположном раме, опорным колесом, находящимся в контакте с опорной поверхностью.
Подъемники поддонов такого типа, предназначенные для подъема и транспортировки поддонов, обычно снабжены гидравлическим подъемным механизмом. Такой механизм имеет универсальную конструкцию и прост в управлении, даже если груз относительно тяжелый.
Однако эта конструкция имеет определенные недостатки. Например, трудно обеспечить полную герметичность его клапанов и соединений в течение продолжительного времени. Вследствие этого иногда происходит утечка масла, что достаточно неприятно, особенно если погрузчик поддонов работает в "чистых" условиях, например, если его используют на чувствительных покрытиях, таких как ковровые покрытия и т.п. Для уменьшения риска загрязнения или лаже повреждения опорной поверхности можно предотвратить утечку масла путем регулярного обслуживания гидравлики подъемного механизма погрузчика поддонов. Однако экстенсивное обслуживание связано с существенными затратами.
Задачей настоящего изобретения является создание чисто механического подъемного механизма для использования в погрузчиках поддонов, с помощью которого устраняется указанная выше проблема при одновременном обеспечении улучшенного передаточного соотношения для данного погрузчика поддонов, чем в гидравлическом подъемном механизме, что позволяет обрабатывать грузы быстрее и эффективнее.
Эта задача достигается за счет того, что в усовершенствованном погрузчике поддонов, содержащем вертикальную раму и два горизонтальных подъемных вилочных элемента, выступающих из рамы и выполненных с возможностью вертикального перемещения совместно с указанной рамой с помощью подъемного механизма, при этом каждый вилочный элемент снабжен на свободном конце, противоположном раме, опорным колесом, находящимся в контакте с опорной поверхностью, установленным на поворотном рычаге, смонтированном с возможностью поворота на поворотной оси на подъемном вилочном элементе, при этом поворотный рычаг выполнен с возможностью поворота вниз от указанных элементов для увеличения расстояния указанных элементов от опорной поверхности, причем подъемный механизм содержит стойку, которая установлена с возможностью подъема и опускания внутри вертикального полого цилиндра и которая соединена с рамой с возможностью перемещения рамы и подъемных вилочных элементов вверх и вниз, коромысло, которое шарнирно соединено с рамой и один конец которого соединен с поворотным рычагом с помощью стержня, который соединен с поворотным рычагом шарниром, расположенным на расстоянии от поворотной оси, коромысло на противоположном от стержня конце соединено с канатом, тросом или цепью, проходящей через два установленных на раме шкива и через стойку к месту закрепления, при этом стойка установлена с возможностью поднимания рамы при своем перемещении вверх и одновременного поворота с помощью каната, троса или цепи коромысла, коромысло в свою очередь установлено с возможностью поворота посредством тягового усилия, прикладываемого к являющемуся тяговым стержню, поворотного рычага вниз и тем самым поднимания подъемных вилочных элементов относительно опорной поверхности.
В усовершенствованном погрузчике стойка может быть выполнена с возможностью вертикального перемещения с помощью находящейся с ней в зацеплении поворотной, выполненной в форме стержня шестерни, при этом на шестерне установлен рычаг с возможностью свободного поворота на ней, на котором установлен тормозной механизм с возможностью следования за движениями рычага, на одном конце выполненной в форме стержня шестерни установлена муфта свободного хода, взаимодействующая с шестерней и тормозным механизмом так, что тормозной механизм при перемещении рычага для поднимания подъемных вилочных элементов вынуждает муфту свободного хода вращать шестерню для поднимания стойки, а перемещение рычага в обратном направлении не передается на выполненную в форме стержня шестерню, на противоположном конце шестерни жестко установлено храповое колесо, в зацепление с которым может входить клиновидная собачка, установленная с возможностью предотвращения поворота выполненной в форме стержня шестерни в упомянутом обратном направлении.
Целесообразно, чтобы средство ручного управления для возвращения подъемного механизма в исходное положение было соединено с передаточным рычагом, который установлен с возможностью поворота вала при помощи средства ручного управления, при этом на валу жестко установлено средство тормозного механизма для ввода в действие и отпускания фрикционной накладки тормозного механизма.
Возможно размещение фрикционной накладки с возможностью накладывания на муфту свободного хода, причем средство для ввода в действие и отпускания упомянутой накладки может состоять из эксцентрика, находящегося в контакте с концевой частью этой накладки, и установленного с возможностью поворота с валом в направлении указанной концевой части и от нее.
В тормозном механизме может быть предусмотрен регулировочный винт для регулирования прижимного усилия фрикционной накладки к муфте свободного хода с помощью эксцентрика, прижимаемого к противоположной концевой части фрикционной накладки.
Целесообразно также, чтобы клиновидная собачка была жестко установлена на валу вращения, который соединен с передаточным рычагом, и выполнена с возможностью поворота из ее блокирующего положения против действия пружины вследствие перемещения указанного передаточного рычага с помощью средства ручного управления.
Передаточный рычаг может быть соединен с поворотным валом посредством гибкого упругого соединения.
Изобретение описано подробнее ниже с помощью чертежей, на которых изображено:
Фиг. 1 - погрузчик поддонов согласно изобретению в вертикальном разрезе при нахождении погрузчика в нижнем положении;
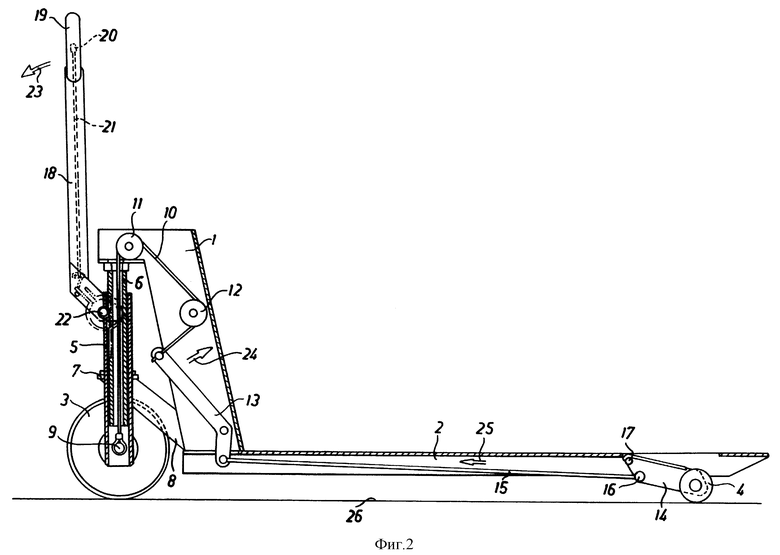
Фиг. 2 - погрузчик поддонов по фиг.1 при нахождении подъемника в поднятом положении;
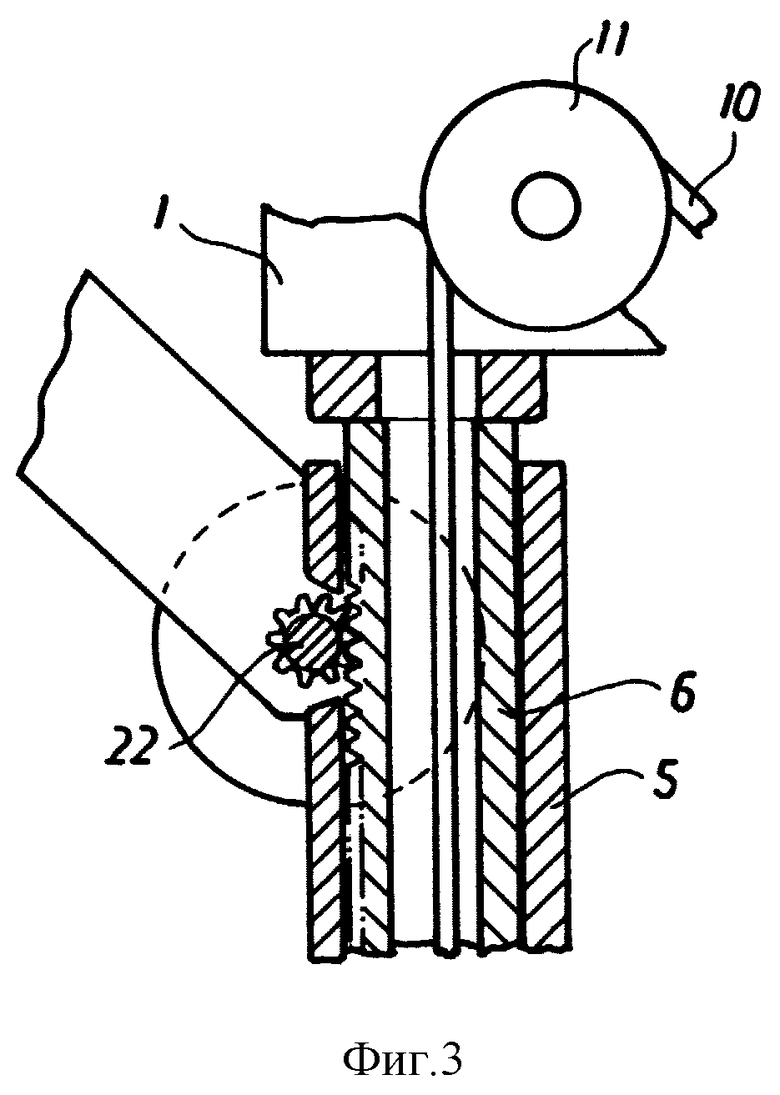
Фиг. 3 - часть подъемного механизма в вертикальном разрезе, в увеличенном масштабе;
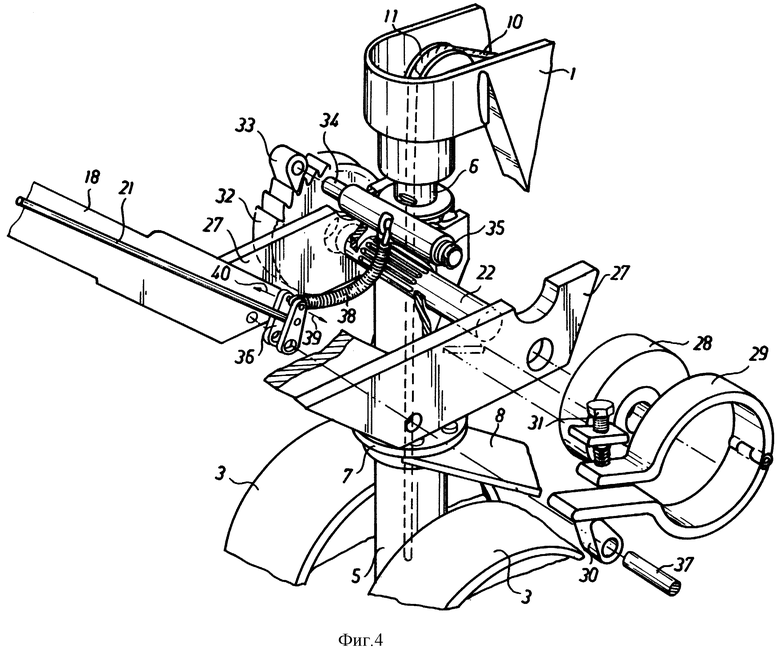
Фиг. 4 - вид в перспективе подъемного механизма в разнесенном виде, в увеличенном масштабе.
Погрузчик поддонов состоит из вертикальной рамной части 1 и двух горизонтальных подъемных вилочных элементов 2, выступающих из рамы. В задней части погрузчик поддонов снабжен двумя большими опорными и управляющими колесами 3, а в передней части, на передних концах вилочных элементов - двумя меньшими опорными колесами 4. Между задними опорными и управляющими колесами 3 установлен вертикальный полый цилиндр 5. Внутри его установлена стойка 6 с возможностью поднимания и опускания, и рамная часть 1 опирается на верхний конец стойки, который выступает из цилиндра 5. Между рамной часть 1 и фиксированным подшипником 7, окружающим полый цилиндр 5, предусмотрены две поперечные опоры 8.
В варианте выполнения изобретения, показанном на фигурах, стойка 6 выполнена в виде трубы. От нижней точки закрепления 9, расположенной ниже стойки 6, через стойку к одному концу плеча двухплечевого коромысла 13 через первый шкив 11 и второй шкив 12 проходит канат, трос, цепь 10 или т.п. Между противоположным концом плеча коромысла 13 и поворотным рычагом 14, на котором установлено опорное колесо 4, расположен тяговый стержень 15. Тяговый стержень 15 соединен с поворотным рычагом 14 шарниром 16, который расположен на некотором расстоянии от шарнирной оси 17, на которой установлен поворотный рычаг 14 с возможностью поворота, для создания момента при приложении силы тяги к тяговому стержню 15.
Кроме того, погрузчик поддонов снабжен рычагом 18 и ручкой 19 с расположенным на ней средством ручного управления 20, с помощью которого может быть приведен в действие подъемный механизм посредством тяги рычажной передачи 21, проходящей через рычаг 18. Это устройство будет подробно описано ниже. Рычаг 18 соединен с выполненной в форме стержня шестерней 22, которая входит в зацепление со стойкой 6.
Подъемный механизм работает следующим образом. При опускании рычага вниз в направлении стрелки 23 на фиг. 2 выполненная в форме стержня шестерня 22 перемещает стойку 6 на некоторое расстояние вверх из цилиндра 5, принуждая тем самым перемещаться вверх рамную часть 1 и подъемные вилочные элементы 2. Так как шкивы 11 и 12 перемещаются вместе с рамной частью 1, то усилие тяги прикладывается к тросу 10 и так далее, заставляя плечо коромысла 13 поворачиваться в направлении стрелки 24. Затем усилие тяги создается в тяговом стержне 15 в направлении стрелки 25, что приводит к повороту поворотного рычага 14 вниз, в результате чего опорное колесо 4 упирается в опорную поверхность 26, на которой стоит погрузчик поддонов. Вследствие указанного перемещения подъема передние концы подъемных вилочных элементов участвуют в подъемном перемещении остальных частей погрузчика поддонов.
Действие подъемного механизма более подробно следует из фиг. 4. Рычаг 18 снабжен двумя угловыми пластинами 27, с помощью которых рычаг 18 может свободно поворачиваться вокруг выполненной в форме стержня шестерни 22. На соседнем конце стержневой шестерни 22, как показано на чертеже, жестко закреплена муфта свободного хода 28, вокруг которой проходит фрикционная накладка 29. Фрикционная накладка 29 соединена с уголковой пластиной 27 так, чтобы следовать за ее поворотным перемещением. С помощью эксцентрика 30 фрикционная накладка 29 затягивается вокруг муфты свободного хода. Предусмотрен регулировочный винт 31 для регулирования прижимного усилия фрикционной накладки 29.
Муфта свободного хода работает следующим образом. При повороте рычага 18 вниз его поворотное движение передается через уголковую пластину 27, фрикционную накладку 29 и муфту свободного хода 28, что заставляет шестерню 22 поворачиваться против часовой стрелки, как показано на фиг. 4, заставляя перемещаться зубчатую рейку 6 вверх, наружу из полого цилиндра 5. При обратном перемещении рычага 18 муфта свободного хода проскальзывает свободно с шестерней 22. На противоположном конце выполненной в форме стержня шестерни 22 установлено жестко соединенное с ней храповое колесо 32, находящееся в зацеплении с клиновидной собачкой 33, при этом собачка установлена на поворотной оси 34, нагруженной пружиной 35 так, чтобы возвращать клиновидную собачку 33 в ее блокирующее положение в контакте с храповым колесом 32. При выполнении упомянутого возвратного перемещения рычага 18 храповое колесо препятствует перемещению выполненной в форме стержня шестерни 22 и опусканию зубчатой рейки 6.
С помощью тяги рычажной передачи 21 средство ручного управления 20 соединено с передаточным рычагом 36, который установлен на том же поворотном валу 37, что и эксцентрик 30. Кроме того, через гибкое соединение 38 передаточный рычаг 36 соединен с поворотным валом 34.
Ручное управление 20 позволяет установить подъемный механизм в три различных положения, а именно: в нижнее положение при перемещении передаточного рычага 36 в направлении стрелки 39, в среднее положение, изображенное на чертеже, и в верхнее положение, когда передаточный рычаг 36 перемещен в направлении стрелки 40. В нижнем положении эксцентрик повернут внутрь в положение торможения фрикционной накладки 29. В этом положении подъемный механизм может поднимать подъемные вилочные элементы 2. При каждом повороте вниз рычага 18 храповое колесо 32 поворачивается под клиновидной собачкой 33 и при каждом возвратном движении рычага 18 клиновидная собачка 33 перемещается в блокирующее положение, в то время как одновременно тормозное устройство и муфта свободного хода свободно перемещаются вокруг выполненной в форме стержня шестерни 22 и тем самым следует за возвратным перемещением уголковой пластины 27.
Если передаточный рычаг 36 перемещен в среднее положение, то соединение 38 слегка растянуто. Если поворачивать ручку 19 и рычаг 18 вниз, то соединение 38 растягивается и освобождает собачку 33 из ее блокирующего положения. Однако эксцентрик 30 будет повернут при этом лишь на незначительное расстояние, поэтому тормозной механизм еще затянут. С помощью натягивания в этой ситуации ручного управления 20 и перемещения тем самым передаточного рычага 36 в верхнее положение, т.е. в направлении стрелки 40, можно постепенно отпускать тормозной механизм, заставляя опускаться подъемные вилочные элементы 2 в сторону опорной поверхности 26 медленнее или быстрее.
Благодаря наличию изогнутого, гибкого соединения 38 возможно обеспечение четвертого положения подъемного механизма. Если потянуть за ручное управление 20 без поворота рычага 18 вниз, то эксцентрик 30 будет повернут из запирающего положения, однако соединение 38 будет только распрямлено и тем самым не выведет из зацепления клиновидную собачку 33. В этом положении рычаг 18 может свободно перемещаться, что облегчает приведение в действие и передвижение погрузчика поддонов.
Изобретение не ограничивается только приведенным и показанным вариантом выполнения, а может видоизменяться в различных направлениях в объеме признаков формулы изобретения. Например, вместо храпового колеса 32 можно и на этой стороне установить муфту свободного хода, действующую в обратном направлении по отношению к муфте свободного хода 28 и снабженную только одним или возможно несколькими углублениями, в которые может заходить клиновидная собачка 33 с целью запирания. Это решение устраняет сильный шум, вызываемый перемещением клиновидной собачки 33 по зубьям храпового колеса 32.
Изобретение относится к грузоподъемной технике, в частности к погрузчикам поддонов. Усовершенствованный погрузчик поддонов содержит вертикальную раму и два горизонтальных подъемных вилочных элемента, выступающих из рамы и выполненных с возможностью вертикального перемещения совместно с указанной рамой с помощью подъемного механизма. Каждый вилочный элемент снабжен на свободном конце, противоположном раме, опорным колесом, находящимся в контакте с опорной поверхностью, установленным на поворотном рычаге, смонтированном с возможностью поворота на поворотной оси на подъемном вилочном элементе. Поворотный рычаг выполнен с возможностью поворота вниз, а подъемный механизм содержит стойку, которая установлена с возможностью подъема и опускания внутри вертикального полого цилиндра и которая соединена с рамой с возможностью перемещения рамы и подъемных вилочных элементов вверх и вниз, и коромысло, которое шарнирно соединено с рамой и один конец которого соединен с поворотным рычагом с помощью стержня, который соединен с поворотным рычагом шарниром, расположенным на расстоянии от поворотной оси. Коромысло на противоположном от стержня конце соединено с канатом, тросом или цепью, проходящей через два установленных на раме шкива и через стойку к месту закрепления, при этом стойка установлена с возможностью поднимания рамы при своем перемещении вверх и одновременного поворота с помощью каната, троса или цепи коромысла, коромысло в свою очередь установлено с возможностью поворота посредством тягового усилия, прикладываемого к являющемуся тяговым стержню, поворотного рычага вниз и тем самым поднимания подъемных вилочных элементов относительно опорной поверхности. Изобретение обеспечивает создание механического подъемного механизма для погрузчика поддонов. 6 з.п.ф-лы, 4 ил.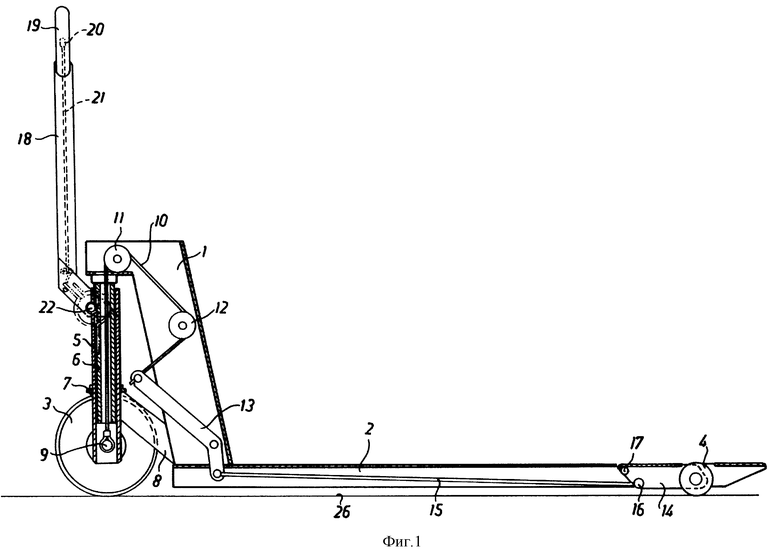
| СПОСОБ И УСТРОЙСТВО СОХРАНЕНИЯ СОСТОЯНИЯ ИГРЫ | 2012 |
|
RU2546498C1 |
| DE 3711662 A1, 27.10.1988 | |||
| Преобразователь "положение-код" | 1973 |
|
SU439837A1 |
| Грузоподъемная тележка | 1988 |
|
SU1614823A1 |

