Изобретение относится к обработке печатной продукции, а именно к устройствам для набора гибких разноименных предметов типа газет, тонких журналов и т.п. в единую пачку с нанесением адреса подписчика.
Целью изобретения является повышение производительности труда и качества комплектации.
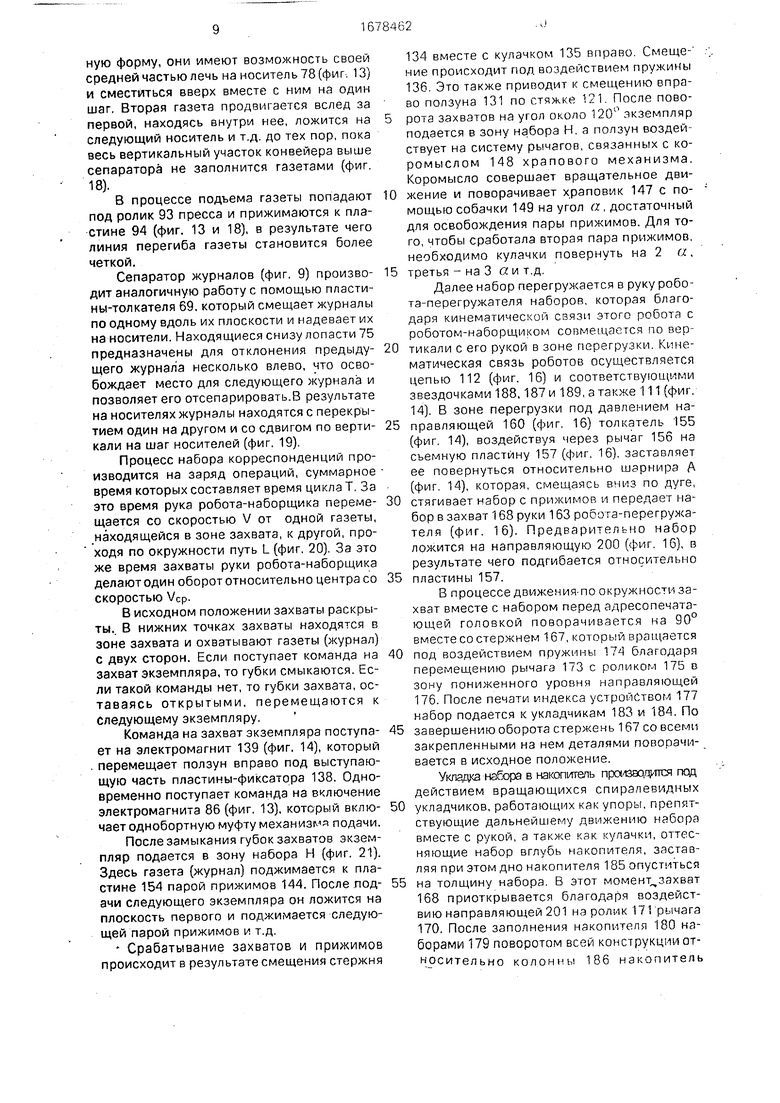
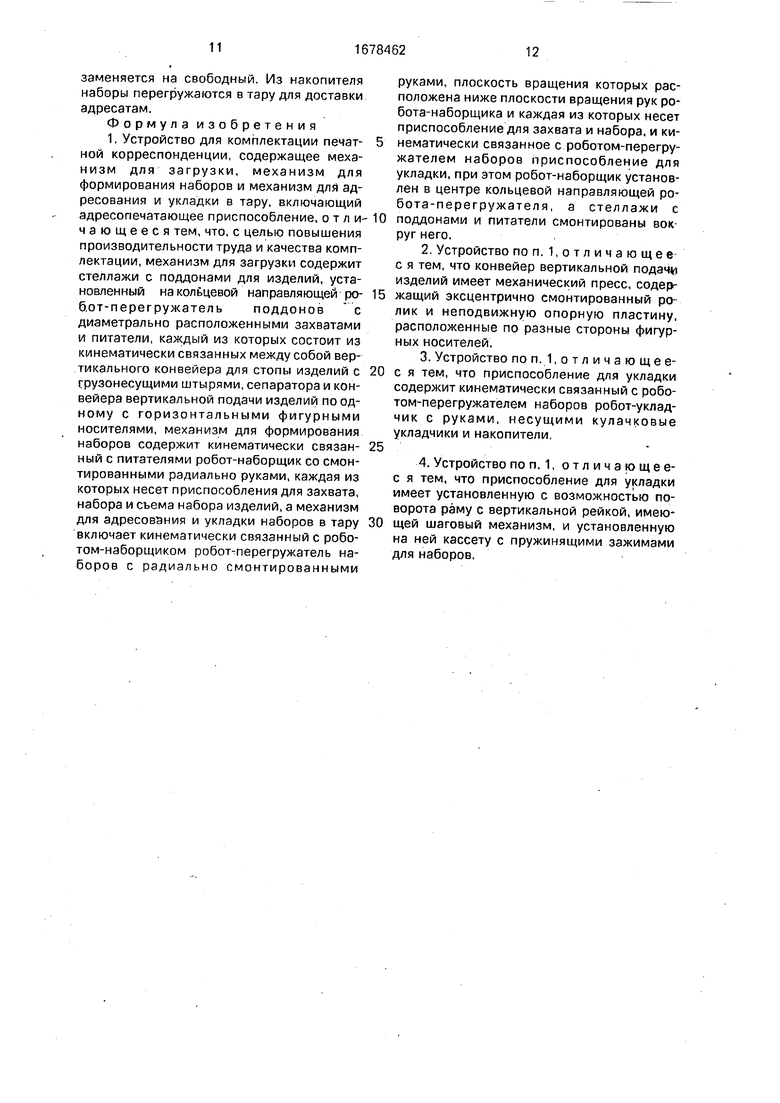
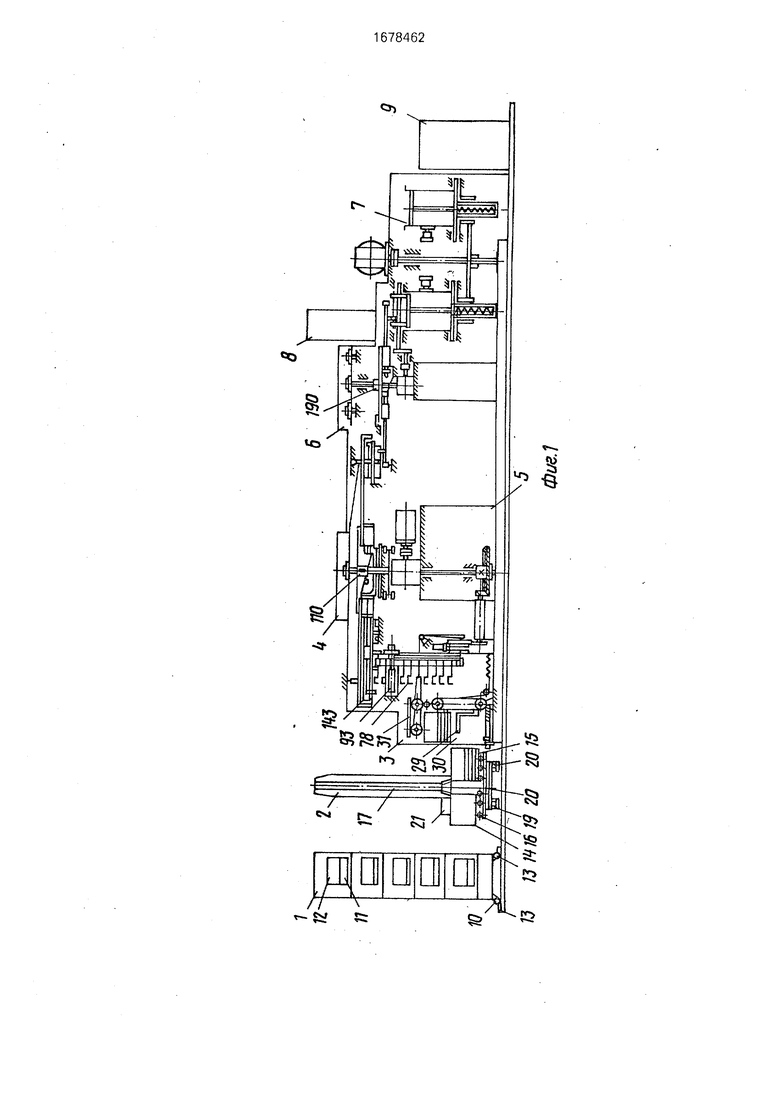
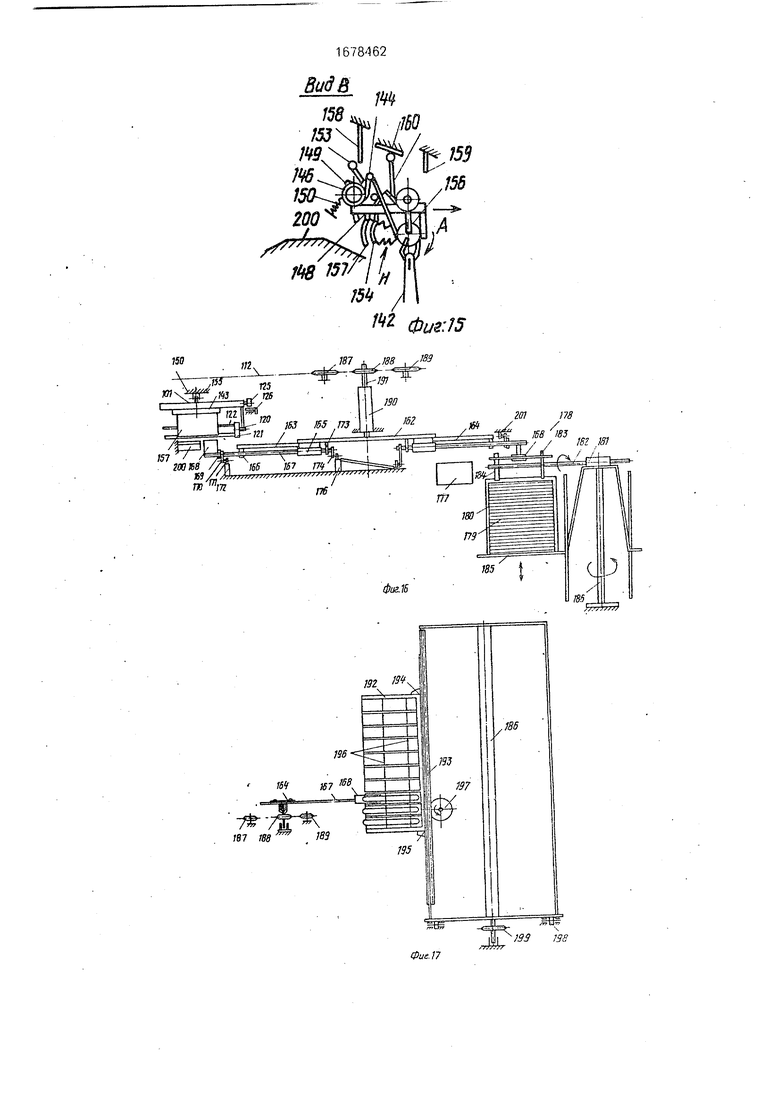
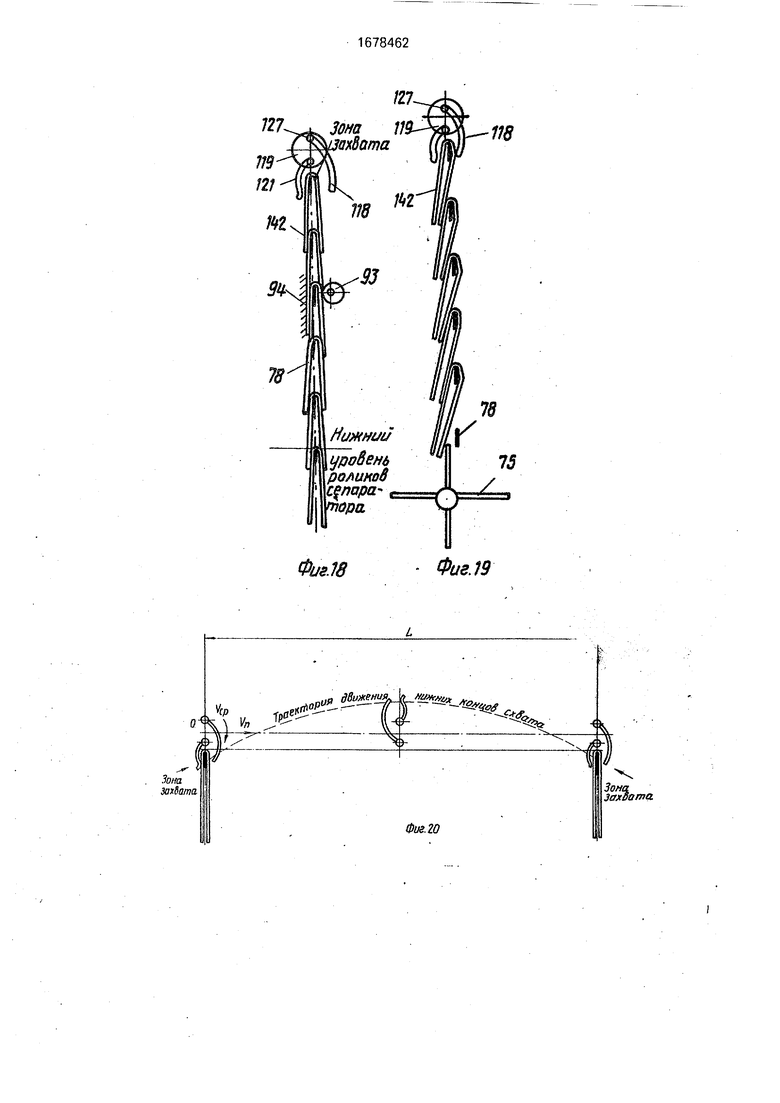
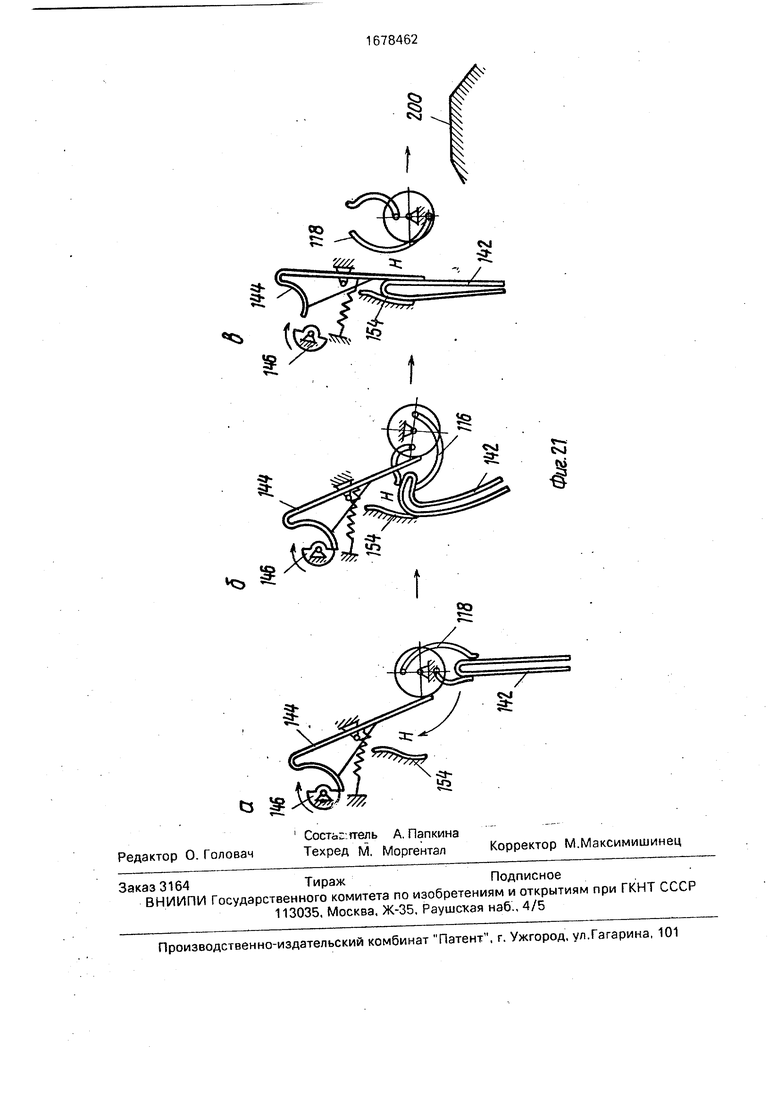
На фиг. 1 схематически изображен роботизированный комплекс, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - поддон для газет; на фиг. 4 - поддон для журналов; на фиг. 5 - вертикальный конвейер питателя газет; на фиг. 6 - грузонесущий штырь конвейера питателя журналов; на фиг. 7 - сепаратор газет; на фиг. 8 - вид А на фиг. 7; на фиг. 9 - сепаратор журналов; на фиг. 10 - вид Б на фиг. 9; на фиг. 11 - отклоняющее устройство сепаратора; на фиг. 12 - тоже, вид сбоку; на фиг. 13 - конвейер вертикальной подачи изделий по одному, на фиг. 14 робот-наборщик с приспособлением для набора, на фиг. 15 - вид В на фиг. 14; на фиг. 16 - робот-перегружатель наборов с рото- том-укладчиком в накопитель, на фиг. 17 - вариант укладки наборов в кассету; на фиг. 18 - схема формирования потока газет одна в другой ; на фиг. 19 - схема формирования потока журналов один в другом ; на фиг. 20 - схема работы захвата руки робота- наборщика; на фиг. 21 - схема работы приспособления для набора.
Устройство (фиг 1) содержит механизм для загрузки, который состоит из стеллажей с поддонами, предназначенными для размещения поступающей на обработку корреспонденцииобслуживающегоробота-перегружателя поддонов 2, питателей 3 по количеству наименований газет и журналов, робота-наборщика для набора печати в комплект 4, приводной станции 5, робота-перегружателя 6 для перегрузки наборов из рук робота-няборщика в приемную
(Л
кассету или накопитель, приспособление для укладки 7 с накопителями или кассетами, адресопечатающего устройства 8 и стойки 9 управления.
Стеллажи 1 - передвижные. Для этой цели они смонтированы на катках 10, Каркасы стеллажей имеют ячейки, вмещающие один поддон 11, заполненный экземплярами газет 12 или журналов. Стеллажи фиксируются в зоне обслуживания башмаками 13.
Робот-перегружатель 2 снабжен двумя расположенными диаметрально вилочными захсатами 14 и 15, имеющими возможность перемещаться вдоль вертикальной стойки 17 вместе с платформой 16, а также по горизонтали вдоль платформы.
Робот-перегружатель смонтирован на самоходной тележке 18, которая движется по кольцевой направляющей в виде рельсов 19 и 20 вокруг робота-наборщика между стеллажами и питателями. Робот снабжен индивидуальным электроприводом 21, обеспечивающим операции подъема-опускания, выдвижения и передвижения.
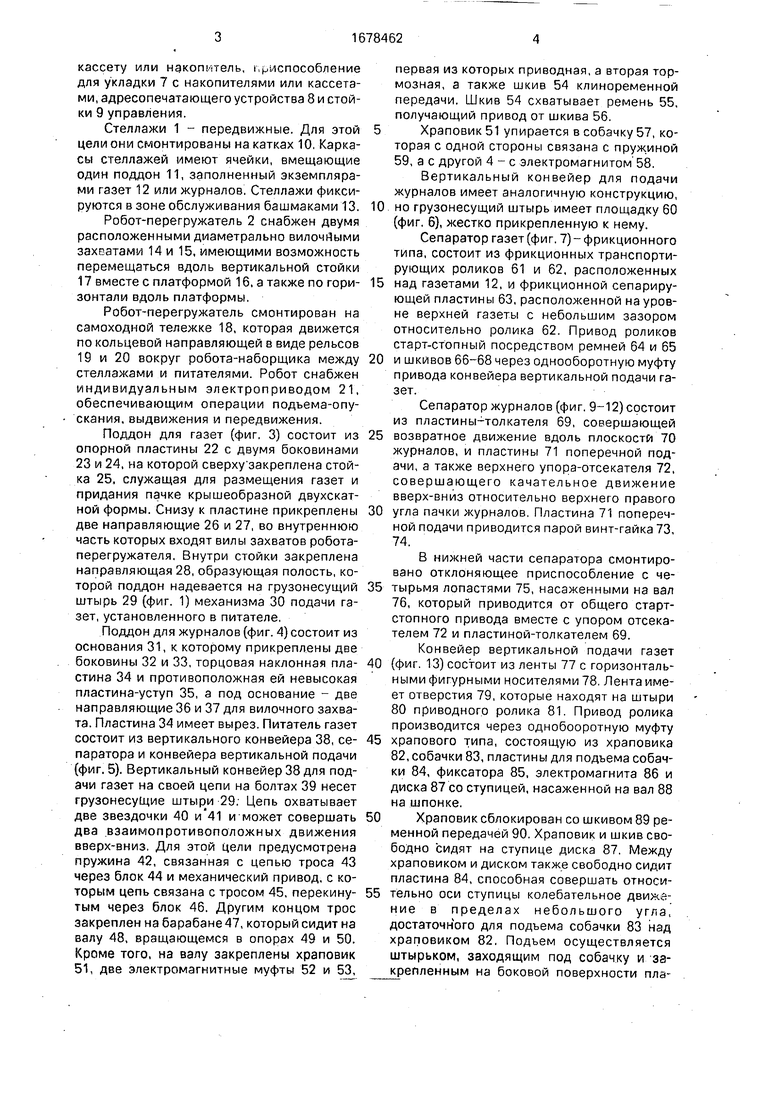
Поддон для газет (фиг. 3) состоит из опорной пластины 22 с двумя боковинами 23 и 24, на которой сверхузакреплена стойка 25, служащая для размещения газет и придания пачке крышеобразной двухскатной формы. Снизу к пластине прикреплены две направляющие 26 и 27, во внутреннюю часть которых входят вилы захватов робота- перегружателя. Внутри стойки закреплена направляющая 28, образующая полость, которой поддон надевается на грузонесущий штырь 29 (фиг. 1) механизма 30 подачи газет, установленного в питателе,
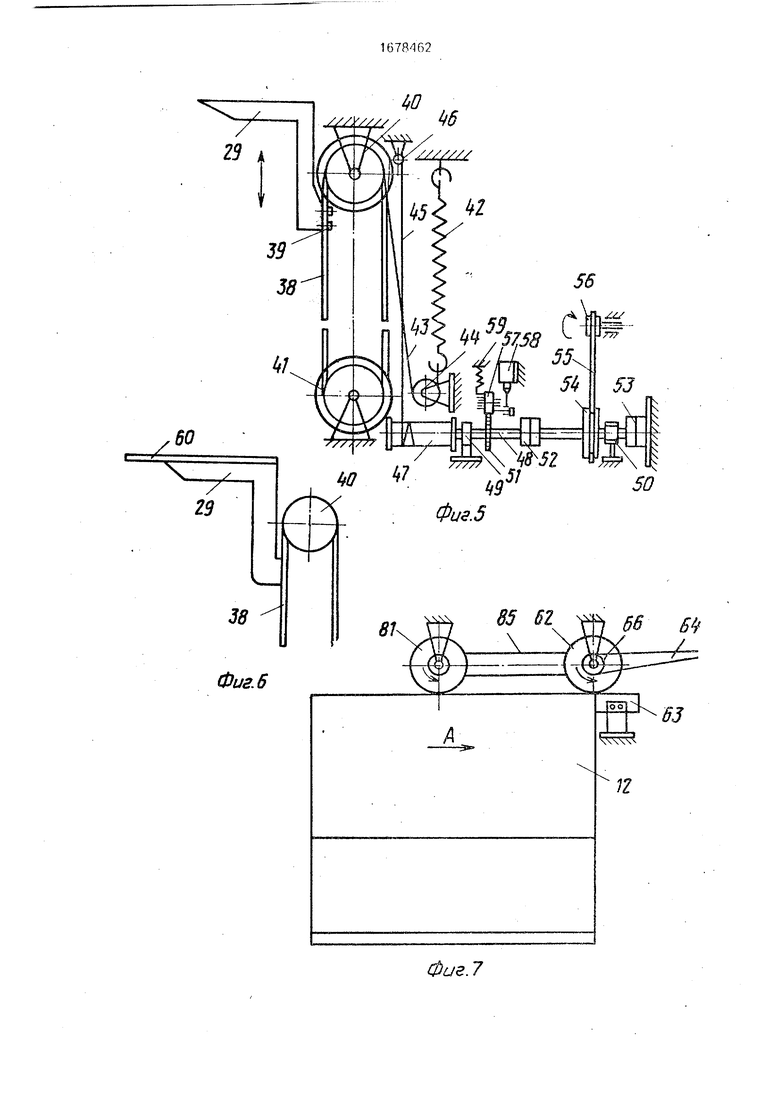
Поддон для журналов (фиг. 4) состоит из основания 31, к которому прикреплены две боковины 32 и 33, торцовая наклонная пластина 34 и противоположная ей невысокая пластина-уступ 35, а под основание - две направляющие 36 и 37 для вилочного захвата. Пластина 34 имеет вырез. Питатель газет состоит из вертикального конвейера 38, сепаратора и конвейера вертикальной подачи (фиг. 5). Вертикальный конвейер 38 для подачи газет на своей цепи на болтах 39 несет грузонесущие штыри 29; Цепь охватывает две звездочки 40 и может совершать два .взаимопротивоположных движения вверх-вниз, Для этой цели предусмотрена пружина 42, связанная с цепью троса 43 через блок 44 и механический привод, с которым цепь связана с тросом 45, перекинутым через блок 46. Другим концом трос закреплен на барабане 47, который сидит на валу 48, вращающемся в опорах 49 и 50. Кроме того, на валу закреплены храповик 51, две электромагнитные муфты 52 и 53,
первая из которых приводная, а вторая тормозная, а также шкив 54 клиноременной передачи. Шкив 54 схватывает ремень 55, получающий привод от шкива 56.
Храповик 51 упирается в собачку 57, которая с одной стороны связана с пружиной 59, а с другой 4 - с электромагнитом 58.
Вертикальный конвейер для подачи журналов имеет аналогичную конструкцию,
0 но грузонесущий штырь имеет площадку 60 (фиг. 6), жестко прикрепленную к нему.
Сепаратор газет (фиг. 7)-фрикционного типа, состоит из фрикционных транспортирующих роликов 61 и 62, расположенных
5 над газетами 12, и фрикционной сепарирующей пластины 63, расположенной на уровне верхней газеты с небольшим зазором относительно ролика 62. Привод роликов старт-стопный посредством ремней 64 и 65
0 и шкивов 66-68 через однооборотную муфту привода конвейера вертикальной подачи газет.
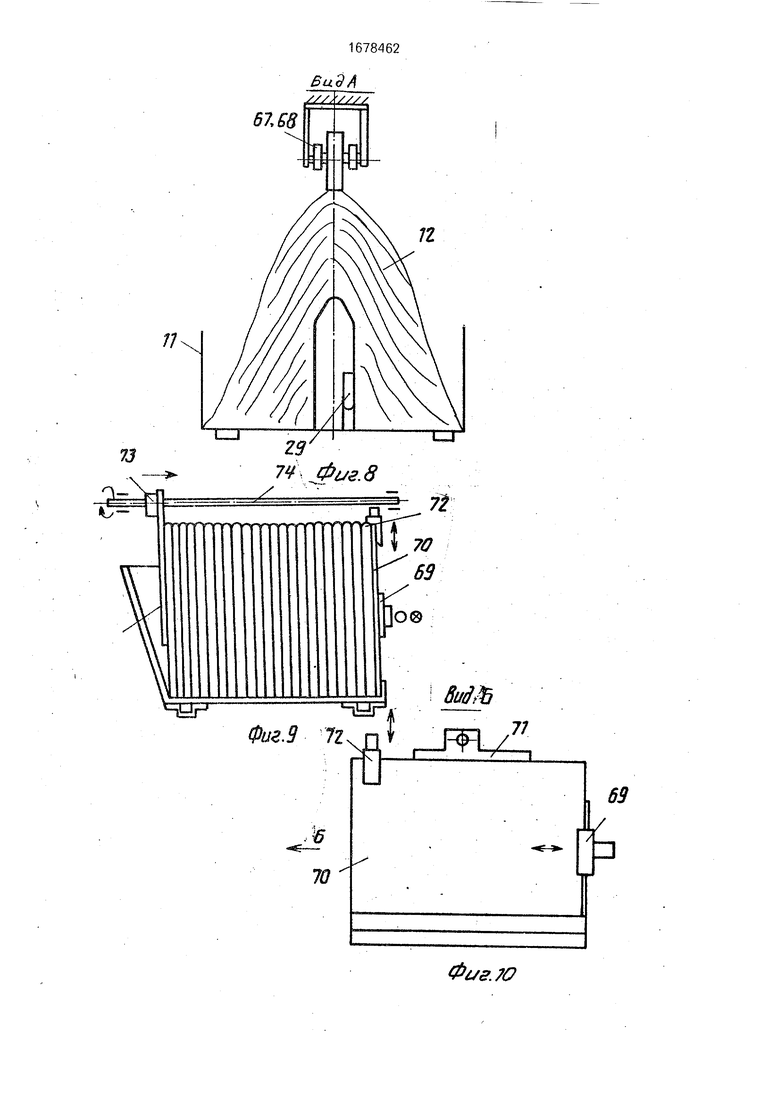
Сепаратор журналов (фиг. 9-12) состоит из пластины-толкателя 69, совершающей
5 возвратное движение вдоль плоскости 70 журналов, и пластины 71 поперечной подачи, а также верхнего упора-отсекателя 72, совершающего качательное движение вверх-вниз относительно верхнего правого
0 угла пачки журналов. Пластина 71 поперечной подачи приводится парой винт-гайка 73, 74.
В нижней части сепаратора смонтировано отклоняющее приспособление с че5 тырьмя лопастями 75, насаженными на вал 76, который приводится от общего старт- стопного привода вместе с упором отсека- телем 72 и пластиной-толкателем 69.
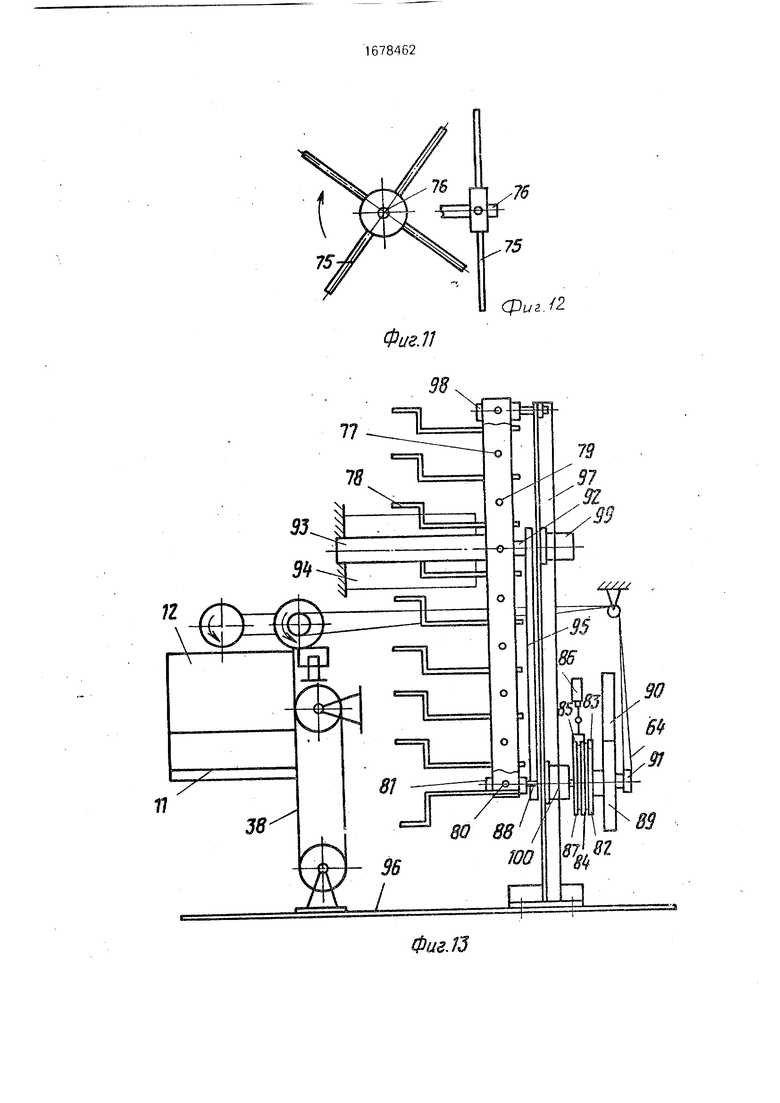
Конвейер вертикальной подачи газет
0 (фиг. 13) состоит из ленты 77 с горизонтальными фигурными носителями 78. Лента имеет отверстия 79, которые находят на штыри 80 приводного ролика 81. Привод ролика производится через однобооротную муфту
5 храпового типа, состоящую из храповика 82, собачки 83, пластины для подъема собачки 84, фиксатора 85, электромагнита 86 и диска 87 со ступицей, насаженной на вал 88 на шпонке.
0 Храповик сблокирован со шкивом 89 ременной передачей 90. Храповик и шкив свободно сидят на ступице диска 87. Между храповиком и диском также свободно сидит пластина 84, способная совершать относи5 тельно оси ступицы колебательное движа- ние в пределах небольшого угла, достаточного для подъема собачки 83 над храповиком 82. Подъем осуществляется штырьком, заходящим под собачку и закрепленным на боковой поверхности пластины. В исходное положение пластина возвращается фиксатором 85, а в рабочее - переводится пружиной.
Справа на валу 88 на шпонке закреплен шкив 91, который посредством ремня 64 приводит сепаратор.
Механический пресс состоит из эксцентрично посаженного на вал 92 ролика 93, находящегося по одну сторону носителей 78, и неподвижной опорной пластины 94 по другую сторону носителей. Привод ролика 93 производится через однооборотную муфту конвейера вертикальной подачи газет посредством ременной передачи 95.
Кроме того, на фиг. 8 показаны основание питателя 96, стойка конвейера вертикальной подачи 97, ролик натяжной конвейера 98, корпус 99 подшипников вала пресса и корпус подшипников 100 вала конвейера.
Конвейер вертикальной подачи журналов имеет аналогичную конструкцию, Б которой механический пресс за ненадобностью отсутствует.
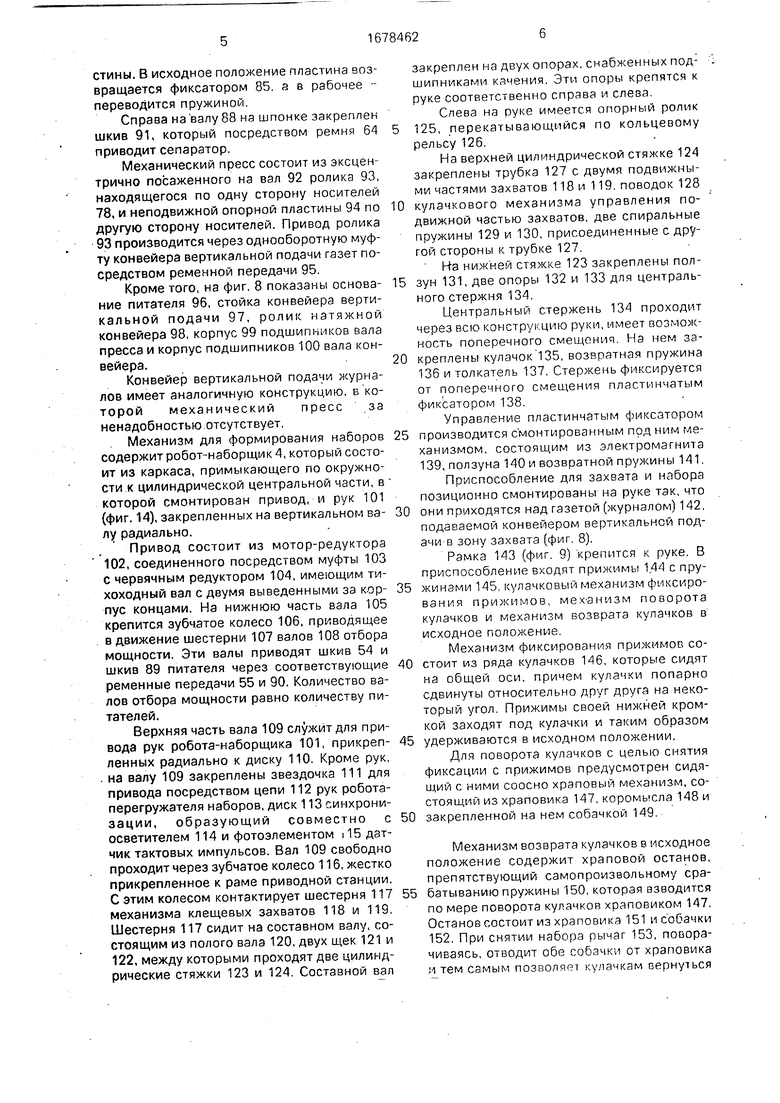
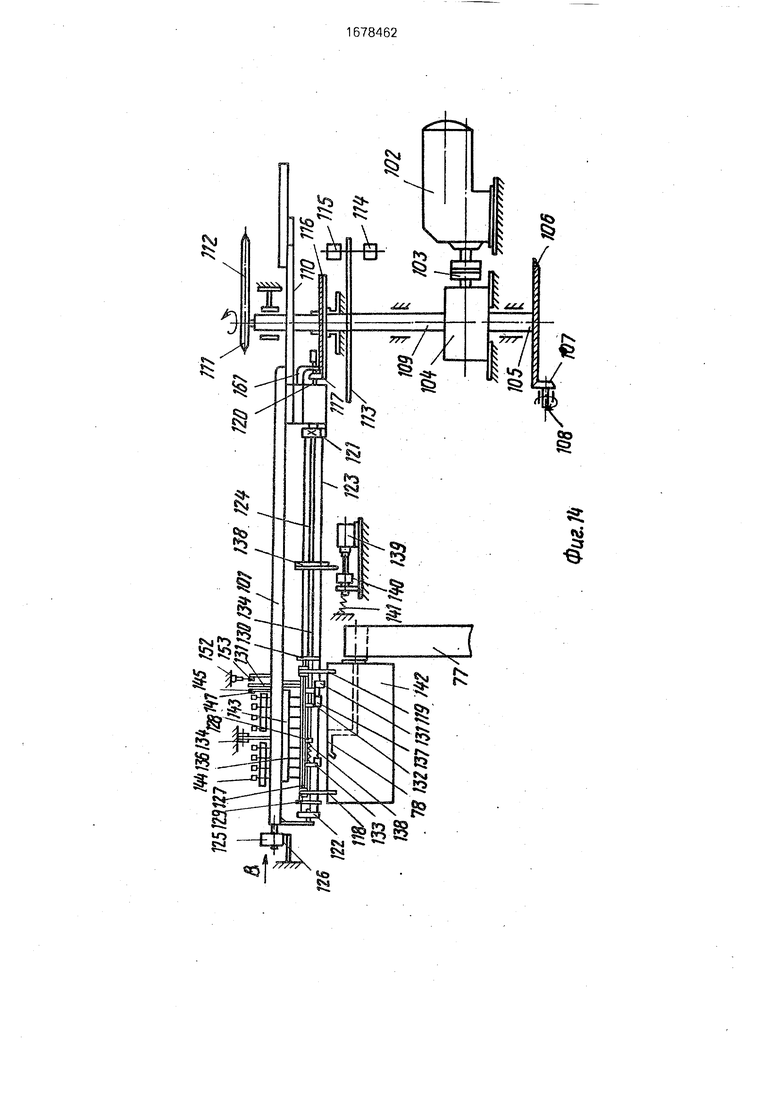
Механизм для формирования наборов содержит робот-наборщик 4, который состоит из каркаса, примыкающего по окружности к цилиндрической центральной части, в которой смонтирован привод, и рук 101 (фиг. 14), закрепленных на вертикальном валу радиально.
Привод состоит из мотор-редуктора 102, соединенного посредством муфты 103 с червячным редуктором 104, имеющим тихоходный вал с двумя выведенными за корпус концами. На нижнюю часть вала 105 крепится зубчатое колесо 106, приводящее в движение шестерни 107 валов 108 отбора мощности. Эти валы приводят шкив 54 и шкив 89 питателя через соответствующие ременные передачи 55 и 90. Количество валов отбора мощности равно количеству питателей.
Верхняя часть вала 109 служит для привода рук робота-наборщика 101, прикрепленных радиально к диску 110. Кроме рук, на валу 109 закреплены звездочка 111 для привода посредством цепи 112 рук робота- перегружателя наборов, диск 113 синхронизации, образующий совместно с осветителем 114 и фотоэлементом И5 датчик тактовых импульсов. Вал 109 свободно проходит через зубчатое колесо 116, жестко прикрепленное к раме приводной станции. С этим колесом контактирует шестерня 117 механизма клещевых захватов 118 и 119. Шестерня 117 сидит на составном валу, состоящим из полого вала 120, двух щек 121 и 122, между которыми проходят две цилиндрические стяжки 123 и 124. Составной вал
закреплен на двух опорах, снабженных подшипниками качения. Эти опоры крепятся к руке соответственно справа и слеза.
Слева на руке имеется опорный ролик 5 125, перекатывающийся по кольцевому рельсу 126.
На верхней цилиндрической стяжке 124 закреплены трубка 127 с двумя подвижными частями захватов 118 и 119. поводок 128
0 кулачкового механизма управления подвижной частью захватов, две спиральные пружины 129 и 130, присоединенные с другой стороны к трубке 127.
Нв нижней стяжке 123 закреплены пол5 зун 131, две опоры 132 и 133 для центрального стержня 134.
Центральный стержень 134 проходит через всю конструкцию руки, имеет возможность поперечного смещения. На нем за0 креплены кулачок 135, возвратная пружина 136 и толкатель 137. Стержень фиксируется от поперечного пластинчатым фиксатором 138.
Управление пластинчатым фиксатором
5 производится смонтированным под ним механизмом, состоящим из электромагнита 139, ползуна 140 и возвратной пружины 141. Приспособление для захвата и набора позиционно смонтированы на руке так, что
0 они приходятся над газетой (журналом) 142, подаваемой конвейером вертикальной подачи в зону захвата (фиг. 8).
Рамка 143 (фиг. 9) крепится к руке. В приспособление входят прижимы 1.44 с пру5 жинами 145, кулачковый механизм фиксирования прижимов, мех-анизм поворота кулачков и механизм возврата кулачков в исходное положение.
Механизм фиксирования прижимов со0 стоит из ряда кулачков 146, которые сидят на общей оси. причем кулачки попарно сдвинуты относительно друг друга на некоторый угол. Прижимы своей нижней кромкой заходят под кулачки и таким образом
5 удерживаются в исходном положении.
Для поворота кулачков с целью снятия фиксации с прижимов предусмотрен сидящий с ними соосно храповый механизм, состоящий из храповика 147, коромысла 148 и
0 закрепленной на нем собачкой 149.
Механизм возврата кулачков в исходное положение содержит храповой останов, препятствующий самопроизвольному сра- 5 батыванию пружины 150, которая взводится по мере поворота кулачков храповиком 147. Останов состоит из храповика 151 и собачки 152. При снятии набора рычаг 153, поворачиваясь, отводит обе собачки от храповика м тем самым позволяет кулачкам вернуться
в исходное положение и зафиксировать прижимы,
Для удерживания набора на рамке предусмотрены шарнирно закрепленные прижимы и пластина 154.
Кроме того, для сьема набора с руки на рамке смонтирован толкатель 155, шарнирно прикрепленный к рычагу 156, способного совершать вращательное движение относительно шарнира А вместе со съемной пластиной 157.
Управление рычагом поворота собачек 153 и прижимами 144 при приведении их в исходное положение упорами 158 и 159, закрепленными на каркасе установки. Управление перегрузочной пластиной - направляющей 160.
Пластина 161 препятствует вращению стержня 134. Для этой цели она с одной стороны закреплена на руке, а с другой - входит в продольный осевой паз в стержне.
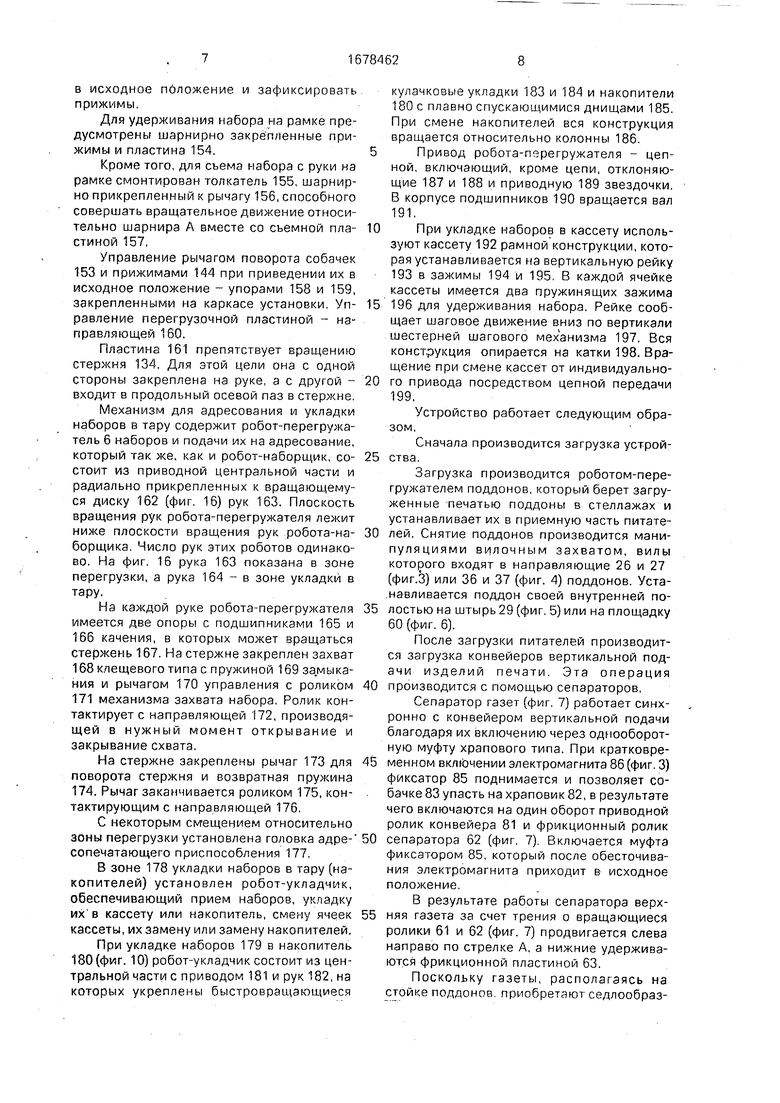
Механизм для адресования и укладки наборов в тару содержит робот-перегружатель 6 наборов и подачи их на адресование, который так же, как и робот-наборщик, состоит из приводной центральной части и радиально прикрепленных к вращающемуся диску 162 (фиг. 16) рук 163. Плоскость вращения рук робота-перегружателя лежит ниже плоскости вращения рук робота-наборщика. Число рук этих роботов одинаково. На фиг. 16 рука 163 показана в зоне перегрузки, а рука 164 - в зоне укладки в тару.
На каждой руке робота-перегружателя имеется две опоры с подшипниками 165 и 166 качения, в которых может вращаться стержень 167. На стержне закреплен захват 168 кпещевоготипа с пружиной 169 замыкания и рычагом 170 управления с роликом 171 механизма захвата набора. Ролик контактируете направляющей 172, производящей в нужный момент открывание и закрывание схвата.
На стержне закреплены рычаг 173 для поворота стержня и возвратная пружина 174. Рычаг заканчивается роликом 175, контактирующим с направляющей 176.
С некоторым смещением относительно зоны перегрузки установлена головка адре- сопечатающего приспособления 177.
В зоне 178 укладки наборов в тару (накопителей) установлен робот-укладчик, обеспечивающий прием наборов, укладку их в кассету или накопитель, смену ячеек кассеты, их замену или замену накопителей.
При укладке наборов 179 в накопитель 180 (фиг. 10) робот-укладчик состоит из центральной части с приводом 181 и рук 182, на которых укреплены быстровращающиеся
кулачковые укладки 183 и 184 и накопители 180 с плавно спускающимися днищами 185. При смене накопителей вся конструкция вращается относительно колонны 186.
Привод робота-перегружателя - цепной, включающий, кроме цепи, отклоняющие 187 и 188 и приводную 189 звездочки. В корпусе подшипников 190 вращается вал 191.
0 При укладке наборов в кассету используют кассету 192 рамной конструкции,которая устанавливается на вертикальную рейку 193 в зажимы 194 и 195 В каждой ячейке кассеты имеется два пружинящих зажима
5 196 для удерживания набора. Рейке сообщает шаговое движение вниз по вертикали шестерней шагового механизма 197. Вся конструкция опирается на катки 198. Вращение при смене кассет от индивидуально0 го привода посредством цепной передачи 199.
Устройство работает следующим образом.
Сначала производится загрузка устрой5 ства.
Загрузка производится роботом-перегружателем поддонов, который берет загруженные печатью поддоны в стеллажах и устанавливает их в приемную часть питате0 лей. Снятие поддонов производится манипуляциями вилочным захватом, вилы которого входят в направляющие 26 и 27 (фиг.З) или 36 и 37 (фиг. 4) поддонов. Устанавливается поддон своей внутренней по5 лостью на штырь 29 (фиг. 5) или на площадку 60 (фиг. 6).
После загрузки питателей производится загрузка конвейеров вертикальной подачи изделий печати. Эта операция
0 производится с помощью сепараторов.
Сепаратор газет (фиг. 7) работает синхронно с конвейером вертикальной подачи благодаря их включению через однооборот- ную муфту храпового типа. При кратковре5 менном включении электромагнита 86 (фиг. 3) фиксатор 85 поднимается и позволяет собачке 83 упасть на храповик 82, в результате чего включаются на один оборот приводной ролик конвейера 81 и фрикционный ролик
0 сепаратора 62 (фиг. 7) Включается муфта фиксатором 85, который после обесточива- ния электромагнита приходит в исходное положение.
В результате работы сепаратора верх5 няя газета за счет трения о вращающиеся ролики 61 и 62 (фиг. 7) продвигается слева направо по стрелке А, а нижние удерживаются фрикционной пластиной 63.
Поскольку газеты, располагаясь на стойке поддонов приобретают седлообразную форму, они имеют возможность своей средней частью лечь на носитель 78 (фиг. 13) и сместиться вверх вместе с ним на один шаг. Вторая газета продвигается вслед за первой, находясь внутри нее, ложится на следующий носитель и т.д. до тех пор, пока весь вертикальный участок конвейера выше сепаратора не заполнится газетами (фиг. 18),
В процессе подъема газеты попадают под ролик 93 пресса и прижимаются к пластине 94 (фиг. 13 и 18), в результате чего линия перегиба газеты становится более четкой.
Сепаратор журналов (фиг. 9) производит аналогичную работу с помощью пластины-толкателя 69. который смещает журналы по одному вдоль их плоскости и надевает их на носители. Находящиеся снизу лопасти 75 предназначены для отклонения предыдущего журнала несколько влево, что освобождает место для следующего журнала и позволяет его отсепарировать.В результате на носителях журналы находятся с перекрытием один на другом и со сдвигом по вертикали на шаг носителей (фиг, 19).
Процесс набора корреспонденции производится на заряд операций, суммарное время которых составляет время цикла Т. За это время рука робота-наборщика перемещается со скоростью V от одной газеты, находящейся в зоне захвата, к другой, проходя по окружности путь L (фиг. 20). За это же время захваты руки робота-наборщика делают один оборот относительно центра со скоростью VCp.
В исходном положении захваты раскрыты.. В нижних точках захваты находятся в зоне захвата и охватывают газеты (журнал) с двух сторон. Если поступает команда на захват экземпляра, то губки смыкаются. Если такой команды нет, то губки захвата, оставаясь открытыми, перемещаются к Следующему экземпляру,
Команда на захват экземпляра поступает на электромагнит 139 (фиг. 14), который перемещает ползун вправо под выступающую часть пластины-фиксатора 138. Одновременно поступает команда на включение электромагнита 86 (фиг. 13), который включает однобортную муфту механизма подачи.
После замыкания губок захватов экземпляр подается в зону набора Н (фиг. 21). Здесь газета (журнал) поджимается к пластине 154 парой прижимов 144. После подачи следующего экземпляра он ложится на плоскость первого и поджимается следующей парой прижимов и т.д.
Срабатывание захватов и прижимов происходит в результате смещения стержня
134 вместе с кулачком 135 вправо Смещение происходит под воздействием пружины 136. Это также приводит к смещению вправо ползуна 131 по стяжке 121 После пово- рота захватов на угол около 120° экземпляр подается в зону набора Н, а ползун воздействует на систему рычагов, связанных с коромыслом 148 храпового механизма. Коромысло совершает вращательное дви0 жение и поворачивает храповик 147 с помощью собачки 149 на угол а, достаточный для освобождения пары прижимов. Для того, чтобы сработала вторая пара прижимов, необходимо кулачки повернуть на 2 «,
5 третья - на 3 а и т.д.
Далее набор перегружается в руку робо - та-перегружателя наборов, которая благодаря кинематической связи этого робота с робогом-наборщиком совмещается по вер0 тикали с его рукой в зоне перегрузки. Кинематическая связь роботов осуществляется цепью 112 (фиг. 16) и соответствующими звездочками 188,187 и 189, а также 111 (фиг. 14). В зоне перегрузки под давлением на5 правляющей 160 (фиг. 16) толкатель 155 (фиг. 14), воздействуя через рычаг 156 на сьемную пластину 157 (фиг. 16), заставляет ее повернуться относительно шарнира А (фиг. 14), которая, смещаясь вниз по дуге,
0 стягивает набор с прижимов и передает на- бор в захват 168 руки 163 росога-перегружа- теля (фиг. 16). Предварительно набор ложится на направляющую 200 (фиг. 16), в результате чего подгибается относительно
5 пластины 157.
В процессе движения по окружносш захват вместе с набором перед адресопечата- ющей головкой поворачивается на 90° вместе со стержнем 167, который вращается
0 под воздействием пружины 174 благодаря перемещению рычага 173 с роликом 175 в зону пониженного уровня направляющей 176. После печати индекса устройством 177 набор подается к укладчикам 183 и 184. По
5 завершению оборота стержень 167 со всеми закрепленными на нем деталями поворачивается в исходное положение.
Укладка набора в накопитель пра-тзаодшся под действием вращающихся спиралевидных
0 укладчиков, работающих как упоры, препятствующие дальнейшему движению набора вместе с рукой, а также как кулачки, оттесняющие набор вглубь накопителя, заставляя при этом дно накопителя 185 опуститься
5 на толщину набора. В этот момент ззхват 168 приоткрывается благодаря воздействию направляющей 201 на ролик 171 рычага 170. После заполнения накопителя 180 наборами 179 поворотом всей конструкции относительно колонны 186 накопитель
заменяется на свободный. Из накопителя наборы перегружаются в тару для доставки адресатам.
Формула изобретения 1. Устройство для комплектации печатной корреспонденции, содержащее механизм для загрузки, механизм для формирования наборов и механизм для адресования и укладки в тару, включающий адресопечатающее приспособление, отличающееся тем, что, с целью повышения производительности труда и качества комплектации, механизм для загрузки содержит стеллажи с поддонами для изделий, установленный на кольцевой направляющей ро- б.от-перегружатель поддонов с диаметрально расположенными захватами и питатели, каждый из которых состоит из кинематически связанных между собой вертикального конвейера для стопы изделий с грузонесущими штырями, сепаратора и конвейера вертикальной подачи изделий по одному с горизонтальными фигурными носителями, механизм для формирования наборов содержит кинематически связанный с питателями робот-наборщик со смонтированными радиально руками, каждая из которых несет приспособления для захвата, набора и съема набора изделий, а механизм для адресования и укладки наборов в тару включает кинематически связанный с роботом-наборщиком робот-перегружатель наборов с радиально смонтированными
руками, плоскость вращения которых расположена ниже плоскости вращения рук робота-наборщика и каждая из которых несет приспособление для захвата и набора, и кинематически связанное с роботом-перегружателем наборов приспособление для укладки, при этом робот-наборщик установлен в центре кольцевой направляющей робота-перегружателя, а стеллажи с
поддонами и питатели смонтированы вокруг него.
2.Устройство по п. 1,отличающее с я тем, что конвейер вертикальной подачу изделий имеет механический пресс, содержащий эксцентрично смонтированный ролик и неподвижную опорную пластину, расположенные по разные стороны фигурных носителей.
3.Устройство поп. 1,отличающее- с я тем, что приспособление для укладки
содержит кинематически связанный с роботом-перегружателем наборов робот-укладчик с руками, несущими кулачковые укладчики и накопители,
4.Устройство по п. 1, отличающее- с я тем, что приспособление для укладки имеет установленную с возможностью поворота раму с вертикальной рейкой, имеющей шаговый механизм, и установленную на ней кассету с пружинящими зажимами для наборов.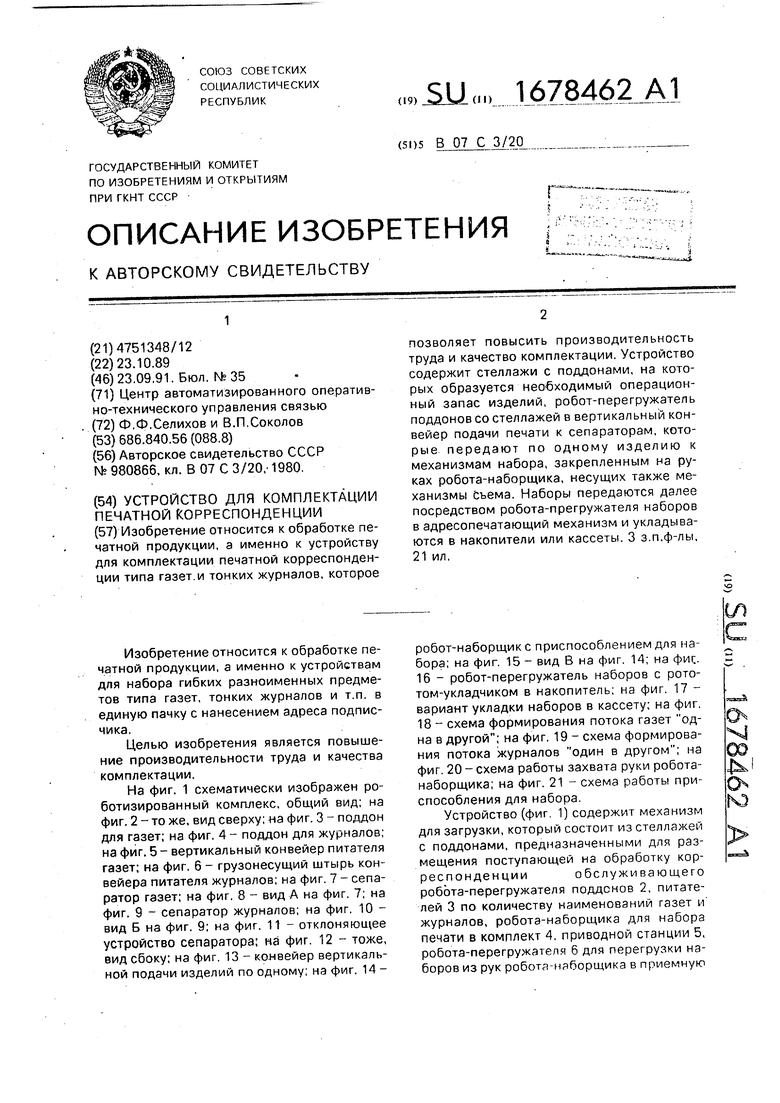
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат-укладчик плит | 1983 |
|
SU1138330A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Способ садки кирпича на обжиговые вагонетки и установка для его осуществления | 1983 |
|
SU1143598A1 |
| ЛИНИЯ НАБОРА НОСЫЛОВ ПЕЧАТИ В ГАЗЕТНО- ЖУРНАЛЬНЫХ ЭКСПЕДИЦИЯХ | 1972 |
|
SU341540A1 |
| Машина для набора комплектов печатной продукции | 1988 |
|
SU1676980A1 |
| КОМПЛЕКС ДЛЯ СУШКИ И ОБЖИГА КИРПИЧА С ЕГО ТРАНСПОРТИРОВКОЙ В КАССЕТАХ, КАССЕТА ДЛЯ ТРАНСПОРТИРОВКИ КИРПИЧА, АВТОМАТ-САДЧИК, АВТОМАТ-УКЛАДЧИК, СУШИЛО И НАКОПИТЕЛЬ КАССЕТ | 2006 |
|
RU2333831C2 |
| Установка для укладки сырца керамических камней на сушильную вагонетку | 1976 |
|
SU579148A1 |
| Технологическая линия для изготовления строительных изделий | 1979 |
|
SU897518A1 |
| Машина для набора комплектов печатной корреспонденции | 1990 |
|
SU1747201A1 |
| Автоматизированная поточная линия для сборки и сварки металлоконструкций | 1976 |
|
SU656786A1 |
Изобретение относится к обработке печатной продукции, а именно к устройству для комплектации печатной корреспонденции типа газет и тонких журналов, которое позволяет повысить производительность труда и качество комплектации. Устройство содержит стеллажи с поддонами, на которых образуется необходимый операционный запас изделий, робот-перегружатель поддонов со стеллажей в вертикальный конвейер подачи печати к сепараторам, которые передают по одному изделию к механизмам набора, закрепленным на руках робота-наборщика, несущих также механизмы съема. Наборы передаются далее посредством робота-прегружателя наборов в адресопечатающий механизм и укладываются в накопители или кассеты. 3 з.п.ф-лы, 21 ил,
26 гг
Фиа.З
пл
/
t
F/
J 37J7
Фиг. 9
Фие.1
27
/
35
N
Z9HU9l
9 гпф
8Ј
6158
73
29 7t Фиг.8
Фиг.9 7z4 n v
J
70
5- 7t
ыл
r-PFL
77
69
Фиг.О
(риг 12
Фив.11
Фиг. 13
т
етчТГ/ Р
156
т
150
т /1
№
199 198
Зона // jaxSama
Нижний
уровень ро/шков Cfnapavpa
Фиг.18
Ь vn V
,
,„я .
Зона Захдата
т
Фиг. 19
. «&
«fife
55fe
ЗонаЗахвата
t3
| Устройство для автоматической сортировки и комплектации газет и журналов | 1980 |
|
SU980866A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
