(54) УСТАНОВКА ДЛЯ УПАКОВКИ РУЛОНОВ НА ПОДДОНЕ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи поддонов | 1980 |
|
SU899391A1 |
| Установка для упаковки изделий | 1981 |
|
SU1034949A1 |
| Устройство для обвязки рулонов с поддоном | 1976 |
|
SU600033A1 |
| АГРЕГАТ УПАКОВКИ ПАЧЕК ЛИСТОВ | 1995 |
|
RU2094339C1 |
| Агрегат для упаковки рулонов проката | 1983 |
|
SU1131775A1 |
| Агрегат для упаковки пакетов листов | 1978 |
|
SU753718A1 |
| Автомат-укладчик плит | 1983 |
|
SU1138330A1 |
| Автоматизированный укладчик плит | 1974 |
|
SU607736A1 |
| Устройство для упаковки в металлическую обертку рулонов | 1983 |
|
SU1137019A1 |
| Автоматическая линия по упаковке рулонов и их стоп | 1983 |
|
SU1122568A1 |
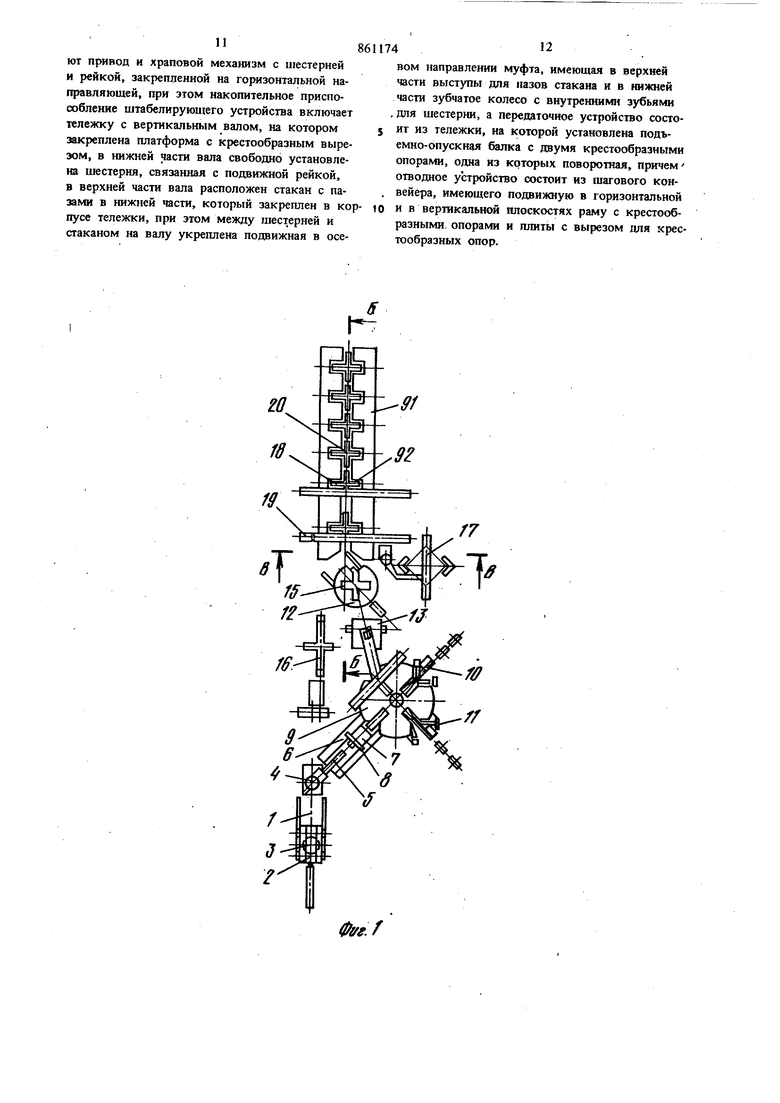
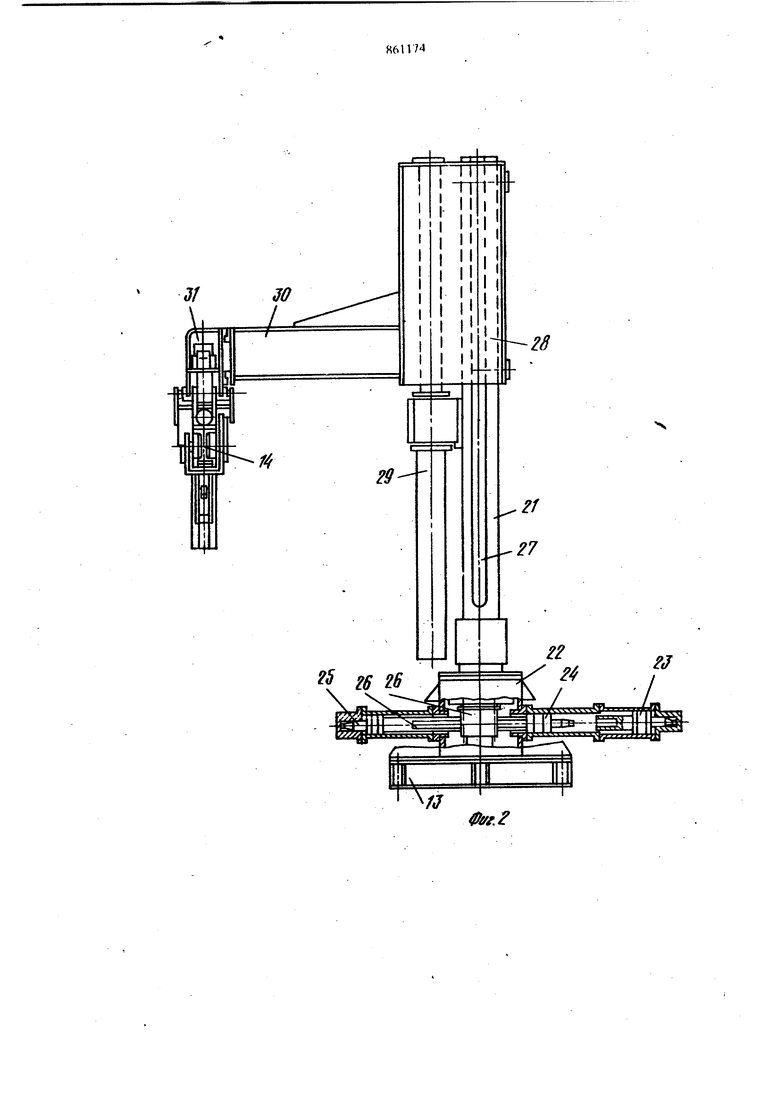
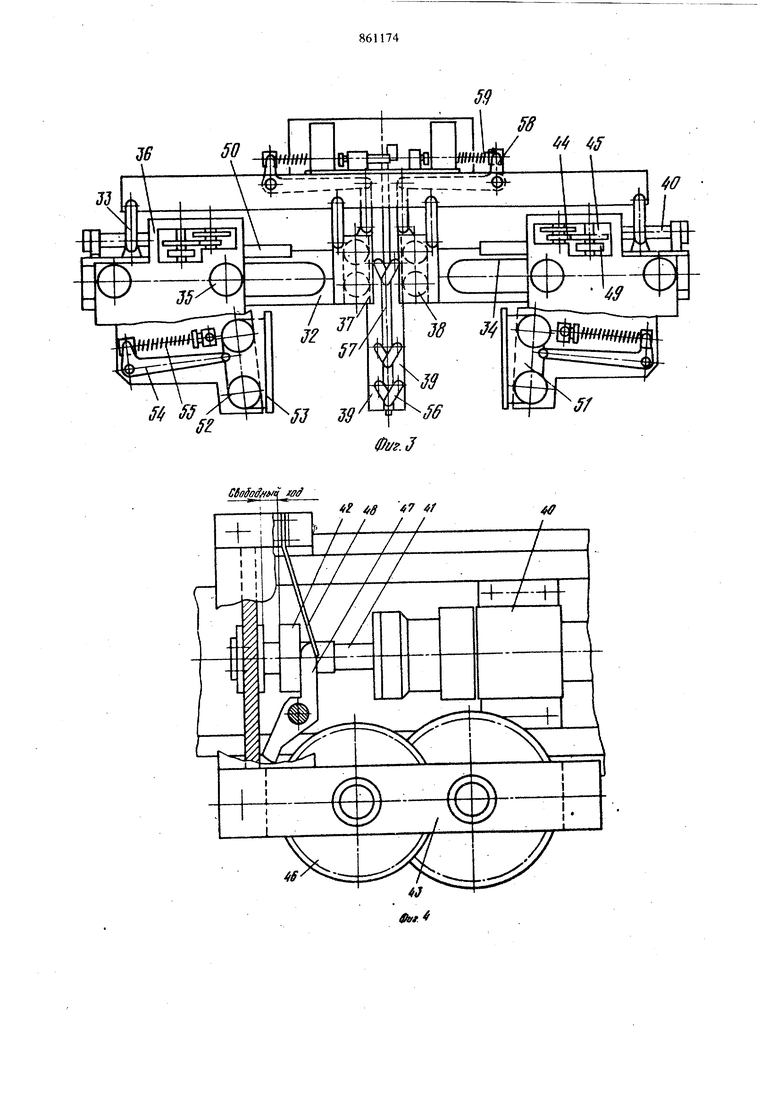
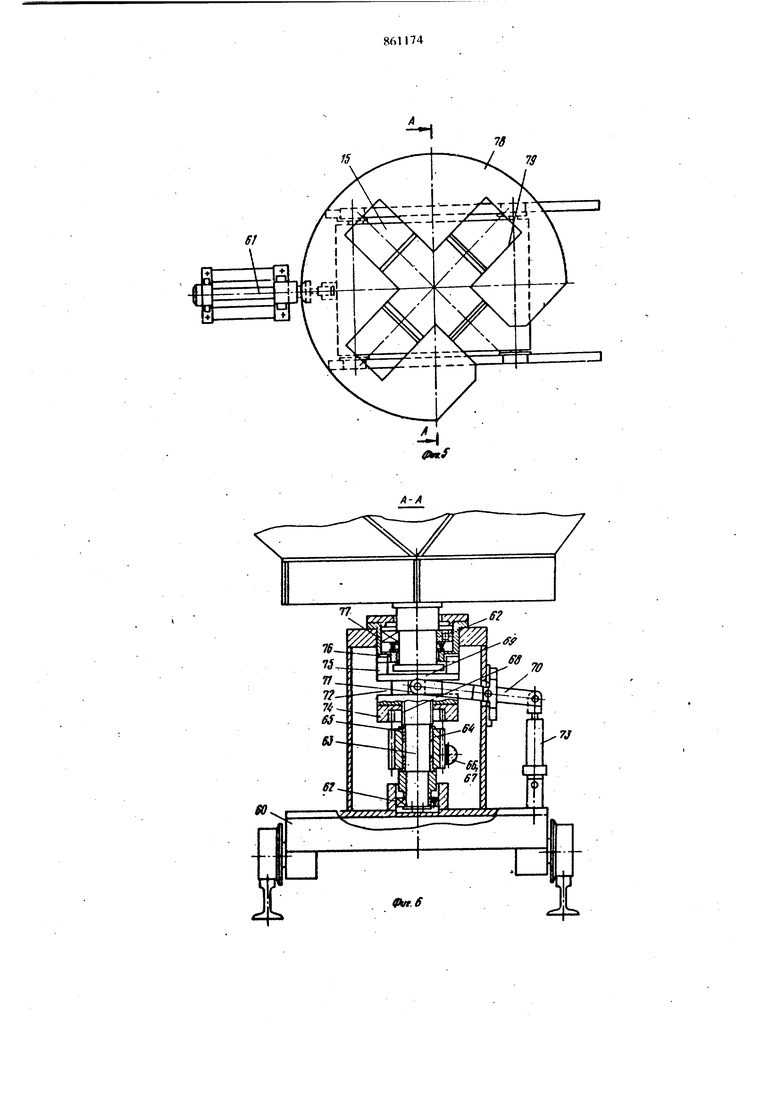
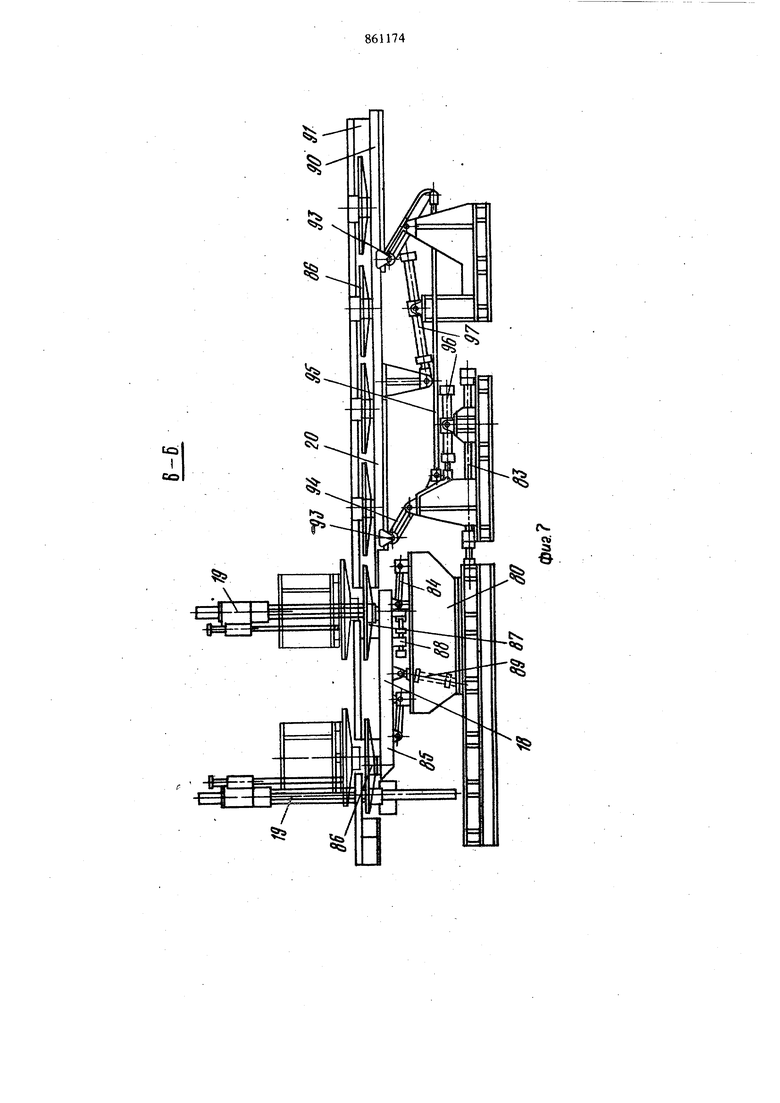
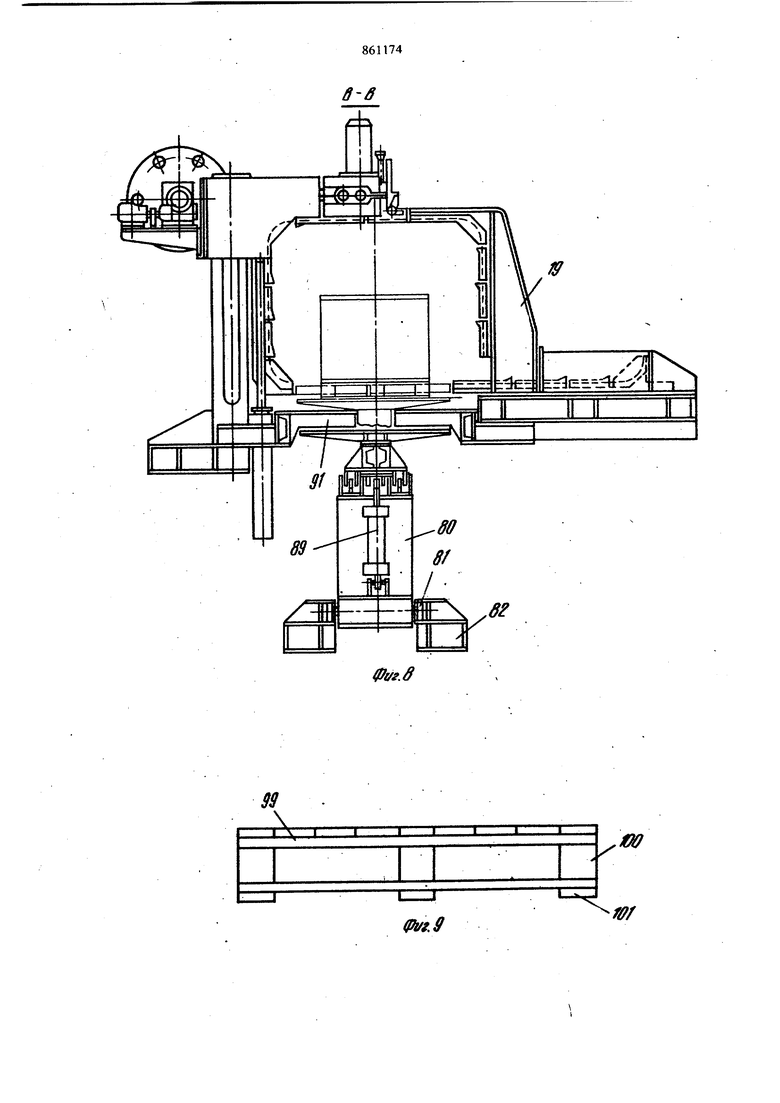
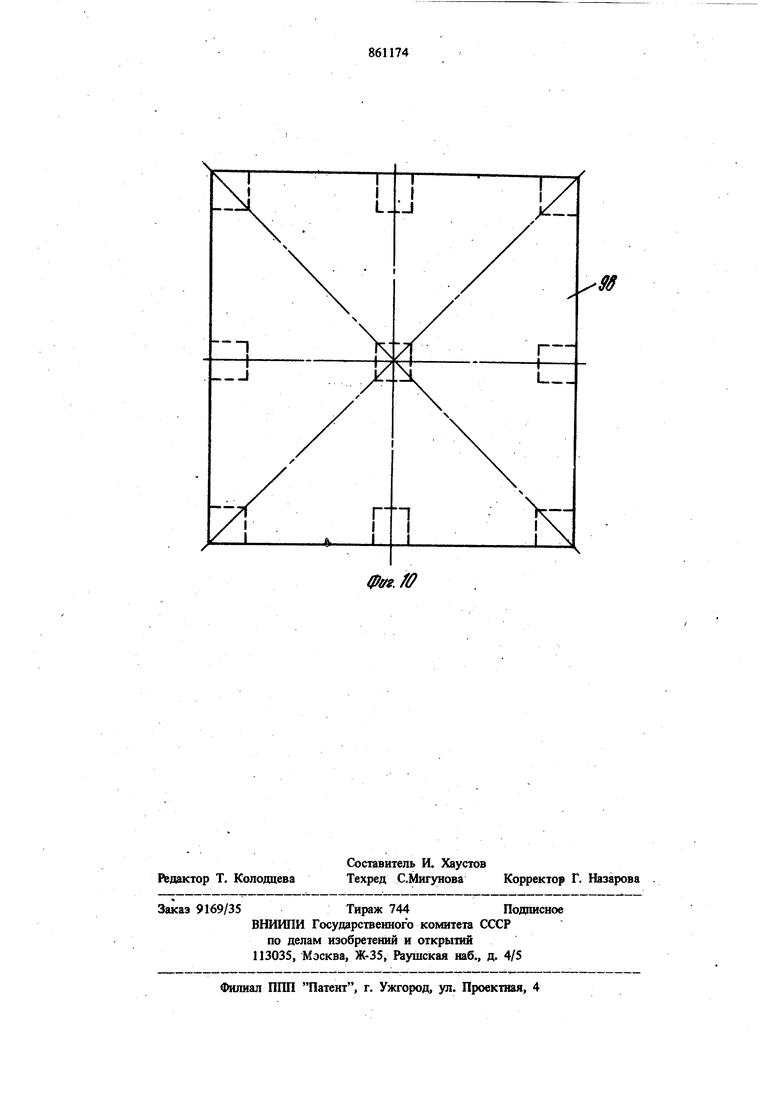
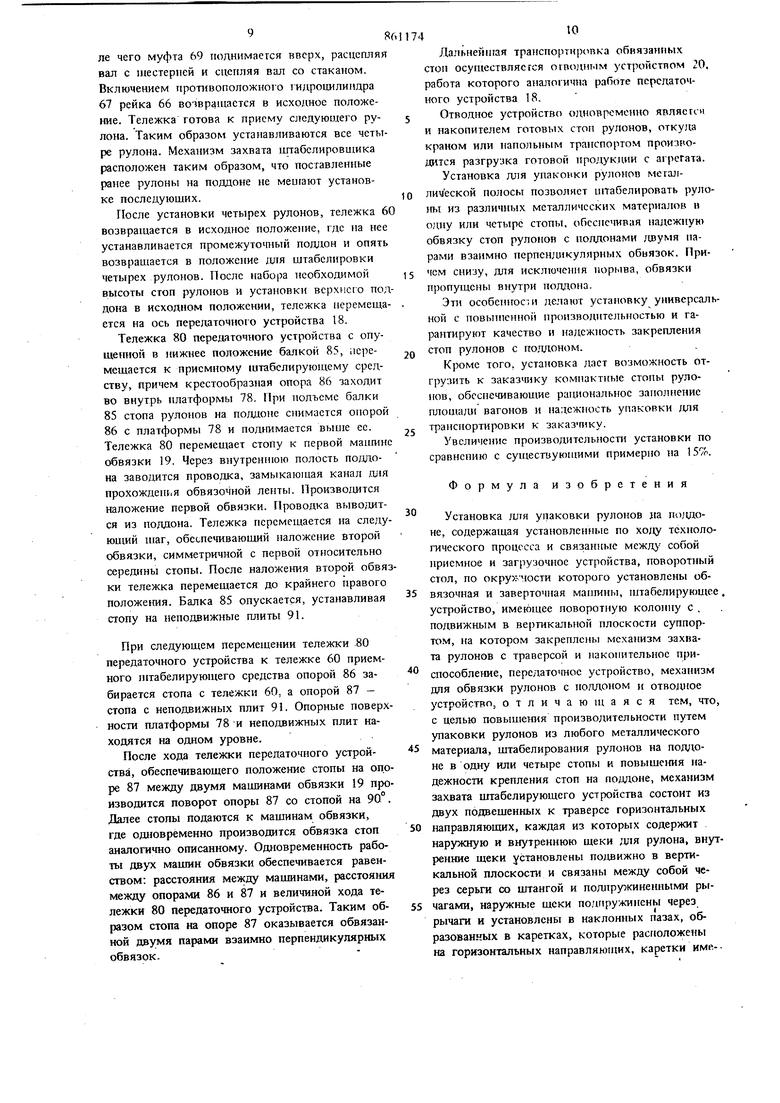
Изобретение относится к оборудованию цехов металлургических заводов, выпускающих металлическую полосу в рулонах и касается линий упаковки узких рулонов. Известна установка для упаковки рулонов на -поддоне, содержащая установленные по ход технологического процесса и связанные между собой приемное и загрузочное устройства, поворотный стол, по окружности которого установлены обвязочная и заверточная мапшны, щтабелирующее устройство, имеющее поворотную колонку с подвижным в вертикальной пло кости суппортом, на котором закреплен механизм захвата рулонов с траверсой и накопительное приспособление, передаточное устройство, механизм для обвязки рулонов с поддоном и отводное устройство. В этой установке полностью исключается перекатывание рулонов за счет передачи их с одной технологической позиции на другую под емно-поворотным столом. В установке имеется маишиа упаковки, позволяющая механизироват и частично автоматизировать процесс упакрвки рулона. Захват упакованных рулонов и установка их в стопу щтабелировщиком производится электромагнитной плитой, исключающей иыпадение витков при транспортировке рулонов. Однако установка не позволяет произбошпъ щгабелировку рулонов из немагнитных металлов, например, алюминия. Штабелирующее устройство может устанавливать рулоны только в одну стопу. При небольщих диаметрах рулона и легких материалах, например для алюминия, одна стопа на поддоне крайне невыгодна при транспортировке продукгщи к заказчику, и кроме того, снижается производительность хвостовой части агрегата. Кроме того, передаточное устройство с машиной обвязки рулонов с поддоном и цепной транспортер не позволяют производить обвязку стопы через внутреннюю полость поддона. Обвязка накладьгаается по нису поддона. Такое расположение обвязкн приводит к ее обрыву в процессе погрузочно-разгрузочных работ при транспортировке к заказчику и распадению всей стопы. 38 Целью изобретения является повышение производительности установки путем упаковки рулонов из любого металлического материала, штабелирование рулонов на поддоне в одну или четыре стопы и повышение надежности креп ления стоп на поддоне. Это достигается тем, что в установке для упаковки рулонов механизм захвата штабелирующего устройства состоит из двух подвешенных к траверсе горизонтальных направляющих, каждая из которых содержит наружную и внутреннюю щеки для рулона, внутренние щеки установлены подвижно в вертикальной плоскости и связаны между собой через серьги со гой и подпружиненными рычагами, наружные щеки подпрумсинены. через рычаги и установлены в наклонных пазах, образованных в каретках, расположенных на горизо.талып 1х направляющих, каретки имеют привод и храповой механизм с шестерней и рейкой, закрепленной на горизонтальной направляющей, при этом накопительное приспособление штабелирующего устройства состоит из тележки с вертикальным валом, на котором закреплена платформа с крестообразным вырезом, в нижней части вала свободно установлена шестерня, связанная с подвижной рейкой, в верхней части вала расположен стакан с пазами в своей нижней части, закрепленный в корпусе тележки, при этом меж ду шестерней и стаканом на валу установлена подвижная в осевом направлении муфт имеющая в верхней части выступы для сцепления с пазами стакана и в нижней части зубчатое колесо с внутренними зубьями для сцепления с шестерней а передаточное устройство состоит из тележки, на которой установлена подъемноопускная балка с двумя крестообразными опорами, одна из которых выполнена поворотной, причем отводное устройство состоит из шагового конвейера, имеющего подвижную в горизонтальной и вертикальной плоскостях раму с кре тообразными опорами и шшты с вырезом для крестообразных опор. На фиг. 1 - установка для упаковки рулонов, вид в плане; на фиг. 2 - штабелировщик общий вид; на фиг. 3 - механизм захвата щтабелировщика; на фиг. 4 - храповой механизм шт;.3елировщика; на фиг. 5 - приемноштабелирующее средство, вид в плане, на фиг, разрез А-А на фиг. 5; im фиг. 7 - разрез Б-Б на фиг. I; на фиг. 8 - разрез В-В на фиг. 1; на фиг. 9 - поддон, общий вид; на фиг. 10 - поддон, вид в плане. Установка для упаковки рулонов металличес кой полосы включает последовательно расположенные по ходу технологического процесса при емное устройство 1, состоящее из тележки 2 с подъемным столом 3 и поворотной колонны со штырем 5; загрузочное устройство 6, включающее подвижную тележку 7, на которой смонтирован кантователь 8; подъемно-поворотный стол 9, работающий в кольцевом шаговом режиме, по окружности которого расположены две упаковочные машины 10, каждая из которых снабжена установкой из трех поворотных конусных роликов 11; штабелирующее устройство 12, состоящее з штабелировщика 13 с Механизмом захвата 14 и приемного накопительного штабепирующего средства 15; весы 16; устройство подачи поддонов 17; передаточное устройство 18; две машины 19 обвязки рулонов с поддоном и отводное устройство 20. Штабелировщик 13 состоит из колонны 21, установленной в корпусе 22 с приводом поворота от гидроцилиндров одностороннего действия 23, 24 и 25 через зубчатую реечную передачу 26 на необходимый угол. В направляющих пазах 27 колонны 21 подвижно установлен суппорт 28, перемещение которого осуществляется гидроцилиндром 29. Механизм захвата 14 через кронштейн 30 и траверсу 31 жестко закрепляется на суппорте и состоит из двух направляющих 32, каждая из которых шарнирно через две пары серег 33, подвешена к траверсе 31. В горизонтальных пазах 34 направляющих 32 располагаются бегунки 35 каретки 36, в вертикальных пазах 37 - бегунки 38 внутренних щек 39. Каждая каретка снабжена гидроцилиндром 40 перемещения, на штоке 41 которого установлена головка 42, и храповым механизмом 43, состояпшм из зубчатой передачи 44, 45, храпового колеса 46, собачки 47 с пружиной 48, постоянно прижимающей к головке 42 собачку 47. Головки 42, соединяющая щток гидроцилиндра 40 с кареткой имеет свободный ход относительно места закрепления в каретке. На одном -валу с зубчатым колесом 45 установлена шестерня 49, сцепленная с зубчатой рейкой 50, закрепленной на направляющей 32. В наклонных пазах 51 кареток на бегунках 52 установлены наружные щеки 53, которые через рычаги 54 переуравновешены пружинами 55. Внутренние щеки через серьги 56 и промежуточную штангу 57 связаны между собой и через рычаги 58 переуравновешены пружинами 59. Приемное накопительное штабелирующее средство 15состоит из подвижной тележки 60 с приводом от гидроцилиидра 61. В тележке установлен на подшипниках 62 вертикальный вал 63, на котором на подшипнике 64 располагается иОестерня 65, постояиио сцеплеиа с зубчатой рейкой 66, с приводом от двухгидроцилиндров 67 одаосторониего действия. На валу 63 на штшцах 68 установлеиа муфта 69, которая через рычаг 70 и камни 7, шариирио устаиовлеииые иа рычаге 70 и размещенные в кольцевом пазу 72 муфты 69, перемещается вдоль вала от гидроцилинцра 73. С нижней стороны к муфте жестко прикрепле но зубчатое колесо 74 с внутренними зубьями В крайнем верхнем положении муфта 69 сцепляется своими верхними выступами 75 с пазами 76 стакана 77, жестко закрепленного в корпусе тележки 60. В крайнем нижнем положении зубчатое колесо 74 муфты сцепляется с шестерней 65. Пр перемещении муфта 69 всегда находится в зацеплении либо с шестерней 65, либо со стаканом 77, лкбо с обеими сразу. На верхнем конце вертикального вала 63, для приема штабелируемой стопы рулонов на поддоне, жестко установлена платформа 78 с крестообразным вырезом 79. Передаточное устройство 18, транспортирующее стопы рулонов на поддонах от штабелирующего устройства 12 к обвязочным машинам 19, выполнено в виде тележки 80, которая на бегунках 81 установлена в неподвижных направляющих 82. Перемещение тележки осуществляется гидроцилиндром 83. На тележке на рычагах 84 установлена подъ емная балка 85 с двумя крестообразными опо рами 86 и 87. Опора 87 имеет привод поворота от гидроцилиндра 88 на 90°. Подъем балки 85 производится гидроцилиндром 89. Отводное устройство 20 представляет собой шагающий конвейер, включающий в себя подвижную раму 90 и неподвижные плиты 91 с крестообразными вырезами 92. На подвижной раме 90 установлены неподвижные крестообраз ные опоры 86. Рама опирается на бегуйки 93 рычагов 94. Подъем и опускание рамы производится качанием рычагов 94, связаьгаых между.собой тягой 95, с приводом от гидроцилиндра 96. Для обвязки стоп рулонов на поддоне в дв взаимно перпендикулярных направлениях через внутреннею полость поддона 98, конструкция последнего выполнена в виде щита 99, опирающегося на отдельные бруски 100, кубической формы. Снизу бруски для придания им устойчивости связаны между собой отдельными досками 101. Такая конструкция поддона 98 позволяет проводить через его внутреннюю полость обвязочные ленты, но транспортировка таких поддонов на известных транспортных средствах невозможна. Транспортировка поддонов 98 со стопами рулонов обеспечивается наличием крестообразных опор 86 и 87 на подвижных узлах и крестообразными вырезами 92 в неподвижных плитах передаточного и уборочного устройств., Крестообразные вырезы предназначены для прохождения крестообразных опор в момент их подъема или опускание при крайних положениях подвижных узлов устройств. Поддоны опираются на опоры 86 и S7 брусками 100, расположенными посредине каждой стороны поддона, а на неподвижньш плиты 1 брусками, расположенными в углах погщона. Установка упаковки рулонов работает следующим образом. Комплект рулонов в горизонтальном положении краном с помощью скобы устанавливается на стол 3 тележки 2 приемного устройства 1, которым рулоны устанавливаются на штырь 5 поворотной колонны 4. Штырь вместе с установленным на нем комплектом рулонов поворачивается и устанавливается по оси загрузочного устройства 6. Кантоваюлем 8 загрузочного устройства 6 рулоны по одному снимаются со штыря поворотной колонны и укладь1ваются на на загрузочную позицию подъемноповоротного стода 9. Подъемно-поворотным столом, работающим в кольцевом шаговом режиме, рулон подается к упаковочной машине 10 и устанавливается на приводные конусные ролики 11. Конец упаковочного материала вручную проводится между шпулями упаковочной цепи и закрепляется в захвате на станине машины. Одновреме1П1ЫМ вращением цепи со шпулями и конусных роликов с установленным на них рулоном; производится упаковка рулона. Изменением соотношения скоростей вращения цепи и рулона можно изменять степень перекрытия витков упаковочного материала, а также выполнять упаковку в несколько слоев. После упаковки на первой машине, рулон подъемно-поворотю 1м столом передается ко второй упаковочной машине, работа которой аналогична работе первой машинъ1. Нз первой машине в качестве упаковочного материала используется крспированная влагонепроницаемая бумага, на второй - полиэтиленовая Пленка. Упаковочные материалы в зависимости от условий упаковки могут быть и другими. После второй упаковки рулон подъемно-поворотным столом подается в разгрузочную позицию к штабелирующему устройству 12. В исходном положении штабелировщика 13 штабелирующего устройства суппорт 28 поднят в крайнее верхнее положение, а колонна 21 повернута таким образом, что механизм захвата располагается над разгрузочной позицией подъемно-поворотного стола, каретки 36 разведены. После установки рулона в разгрузочную позшщю суппорт опускается. Внутрешше щеки 39 механизма захвата входят во внутренний диаметр рулота, наружные щеки 53 располагаются с внешней стороны. После остановки cynftopта включаются гидро1щлиндры 40 перемещения кареток, которые первоначально выбирают своГюяиый ход в месте закрепления головки 42 штока в каретке, при этом собачка 47 под действием пружины 48 прижимается к храповому колесу 46. После выбора свободного кода происхо,шт перемещение кареток и прижатие наруж}«з1Х щек 53 к наружному диаметру рулона. При дальнейщей подаче рабочей жидкости в порщневые полости гидронилиндров, ввиду того, что щтоки, упираясь через каретки в наружные щеки, перемещаться не могут, начинают перемещаться корпуса гидроцилиндров 40, а вместе с ними направляющие 32 и внутренние щеки 39. Таким образом происходит сжатие витков рулона в радиальном направлеш1и в двух местах между наружными и внутрен1гами щеками. Усилие этого сжатия от гидрсцилиндров имеет постоянную величину. Затем суппорт начинает подниматься. При этом, если усилием гидроцилиндров перемещения кареток создается достаточная сила трения между щеками и рулоном, для поднятия рулона, то рулон поднимается. Если же сила тре1шя окажется недостатошой (в случае тяжелых рулонов), т.е. она неспособна преодолеть вес рулона, но способна преодолеть силу переурановещивания от пружин внутренних и наружных щек, то в этом случае при подъеме суппорта внутренние и наружные щеки, прижатые к рулону, остаются вместе с ним на месте. При этом наружные щеки, перемещаясь в наклонных пазах каррток 36, тем самым уменьшают расстояние между на зужными и внутренними щеками, т.е. происходит дальнейшее увеличение сжатия рулона. Возрастает реактивное усилие со стороны рулона, действующее через щеки и каретки на гидроцилиндр 40, находящийся под постоянным давлением. При этом рабочая жидкость из гидроцилиндра начинает выжиматься в магистральдо тех пор, пока не сработает храповой механизм 43, собачка 47 под давлением пружины . 48 заскочит во впадину храпового колеса 46, тем самым воспринимая на себя прирост реактивного усилия и препятствуя дальнейшему перемещению кареток. Таким образом, дополнительное реактивное усилие от рулона замыкается через щеки, каретки, храповой механизм каретки и направляющие и может возрастать в зависи. -ости от веса поднимаемого рулона, не передаваясь на гидроцилиндр. Соответственно изменяется и сила трения между щеками и рулоном. В процессе дальнейшего подъема суппорта наступает момент, когда сила трения становится способной преодолеть вес рулона и рулон вместе с суппортом начинает подниматься до крайнего верхнего положения. Для поворота колонны 21 к позиции весов 16, включаются гидроцилиндры 23 и 25, при этом поршень гидроцилиндра 25 перемещает рейку зубчатой реечной передачи 26 и поршень гидроцилиндра 24 до упора в выдвинутый поршень гидроцилиндра 23. Таким образом при повороте колонны 21 обеспечивается точная остановка суппорта с рулоном над весами.
Далее рулон вместе с суппортом опускается на платформу весов 16. Включаются гидроцилиндры перемещения кареток на обратный ход. Головка 42 штоков выбирают свободный ход, при этом они отводят собачки 47 храповых
колес 46 и разводят каретки в краЙ1ше положения. При этом освобожденные щеки под действием переуравновеашвающих пружин поднимаются вверх. Рулон взвещивается и после этого, в описанной последовательности, произво5 дится передача его с позиции весов на позицию приемного штабелирующего средства 15. При этом гидроцилиндр 23 включен на слив, а поршень гидроцилиндра 25 идет на полный ход, обеспечивая в крайнем положении точную остановку суппорта с рулоном над приемным штабелируюищм средством.
Предварительно на платформу 78 тележки 60 устройством подачи поддонов 17, из отдельно стоящей стопы поддонов, устанавливается один
. деревянный поддон.
В зависимости от штабелировки одлой или четырех стоп рулонов на одном поддоне разлинются два режима работы приемного щтабелирующего средства.
При штабелировке одной стопы тележка, после ее набора, гидроцилиндром 16 перемещается из исходного положения в положе ше на ось передаточного устрюйства, где происходит съем стопь с тележки. В этом случае штабелировщик устанавливает рулон по центру поддо5 на. Поддоны во всех случаях устанавливаются по центру платформы 78. При штабелировке на один поддон четырех стоп, приемное штабелирующее средство работает в следующей последовательности. После установки нижнего поддона, тележка из исходного положения перемещается в сторону уборочного устройства, удаляясь от оси штабелировки на величину, определяемую следующим. Так как поддон имеет квадратную форму, то центр каждой из четырех стоп, из условий их симметричного расположений- на поддоне, должен лежать на диагонали поддона на расстоянии, равном четверти длины этой диагонали от центра поддона. На эту величину и перемещается тележка.
0 После установки первого рулоиа и подъема консоли штабелировщика, муфта 69 до этого находящаяся в зацеплешш со стаканом 77, опускается гидроцилиндром 73 вниз и расцепляя платформу 78 и вал 63 от стакана 77, сцепля5 ет их через зубчатое колесо 74 с шестерней 65. Включением одного из гидроцилиндров 67 производится, через реечное зацепление, поворот платформы с поддоном и рулоном ин 90°. После чего муфта 69 поднимается вверх, расцепля вал с шестерней и сцепляя вал со стаканом. Включеш1ем противоположного т идрош1ли1щра 67 рейка 66 вочвращается в исходное положение. Тележка готова к приему следующего рулона. Таким образом устанавливаются все четы ре рулона. Механизм захвата 1шабелировшика расположен таким образом, что поставленные ранее рулоны на поддоне не меигают установке последующих. После установки четырех рулонов, тележка 6 возвращается в исходное положение, где на не устанавливается промежуточный поддон и опят возвращается в положение Ш1Я штабелировки четырех рулонов. После набора необходимой высоты стоп рулонов и установки верхнего по дона в исходном положении, тележка перемеща ется на ось передаточного устройства 18. Тележка 80 передаточного устройства с опущенной в нижнее положение балкой 85, перемещается к приемному штабелирующему средству, причем крестообразная опора 86 заходит во внутрь платформы 78. При подъеме балки 85стопа рулонов на поддоне снимается опорой 86с платформы 78 и поднимается выиш ее. Тележка 80 перемещает стопу к первой машин обвязки 19. Через внутреннюю полость поддона заводится проводка, замыкающая канал Ш1Я прохождения обвязочной ленты. Производится наложение первой обвязки. Проводка выводатся из поддона. Тележка перемещается па следу юпщй шаг, обеспечивающий наложение второй обвязки, симметричной с первой относительно середины стопы. После наложения второй обвя ки тележка перемещается до крайнего правого положения. Балка 85 опускается, устанавливая стопу на неподвижные плиты 91. При следующем перемещении тележки 80 передаточного устройства к тележке 60 приемного штабелирующего средства опорой 86 забирается стопа с тележки 60, а опорой 87 - стопа с неподвижных плит 91. Опорные поверх ности платформы 78 И неподвижных плит находятся на одном уровне. После хода тележки передаточного устройства, обеспечивающего положение стопы на опо ре 87 между двумя машинами обвязки 19 про изводится поворот опоры 87 со стопой на 90 . Далее стопы подаются к машинам обвязки, где одновременно производится обвязка стоп аналогично описанному. Одновременность работы двух машин обвязки обеспечивается равенством: расстояния между машинами, расстояния между опорами 86 и 87 и величиной хода тележки 80 передаточного устройства. Таким образом стопа на опоре 87 оказывается обвязанной двумя парами взаимно перпендикулярных обвязок. Дальнейшая транспортирстка обвязанных стоп осуществляется огподпым устройством 20. работа которого аналогична работе передаточного устройства 18. Отводное устройство одновременно являегсм и накопителем готовых стоп рулонов, откуда краном или напольным транспортом производится разгрузка готовой продукции с агрегата. Установка для упаконки рулонов металлической полосы позволяет штабелировать рулоны из различ Н)1х металлических материалов и одну или четыре стопы, обеспечивая надежную обвязку стоп рулонов с поддонами двумя нарами взаимно перпендикулярных обвязок. Причем снизу, для исключе}|мя порыва, обвязки пропущены внутри поддона. Эти особешгостн делают установку универсальной с повышенной производителытостью и гарантируют качество и надежность закрепления стоп рулонов с поддоном. Кроме того, установка дает возможность отгрузить к заказчику компактные стопы рулонов, обеспечивающие рациональное заполнение площади вагонов и на;гежпость упаковки для транспортировки к заказчику. Увеличение производительности установки по сравнению с существующими примерно на 15%. Формула изобретения Установка для упаковки рулонов ла поддоне, содержашая установленные по ходу технологического процесса и связанные собой приемное и загрузочное устройства, поворотный стол, по окру лмости которого установлены обвязочная и заверточная мапжны, плабелирующее. устройство, имеющее поворотную колонну с . подвижным в вертикальной плоскости суппортом, на котором закреплены меха1газм захвата рулонов с траверсой и накопительное приспособление, передаточное устройство, механизм для обвязки рулонов с поддоном н отвошюе устройство, отличающаяся тем, что, с целью повышения производительности путем упаковки рулонов из любого металлического материала, штабелирования рулонов на пошюне в одну или четыре стопы и повыше1тя надежности крепления стоп на пошюне, механизм захвата штабелирующего устройства состоит из двух подвешенных к траверсе горизонтальных направляющих, каждая из которых содержит наружную и внутреннюю щеки для рулона, внутренние щеки установлены подвижно в вертикальной плоскости и связаны между собой через серьги со штангой и подпружиненными рычагами, наружные щеки подпружинены через рычаги и установлены в наклонных пазах, образованных в каретках, которые расположены на горизонтальных направляющих, каретки имк-.
ют привод и храповой механизм с шестерней и рейкой, закрепленной на горизонтальной направляющей, при этом накопительное приспособление штабелирующего устройства включает тележку с вертикальным валом, на котором закреплена платформа с крестообразным вырезом, в нижней части вала свободно установлена шестерня, связанная с подвижной рейкой, в верхней части вала расположен стакан с пазами в нижней части, который закреплен в копусе тележки, при этом между шестерней и стаканом на валу укреплена подвижная в осега.
W
fff.
BOM }1аправлении муфта, имеющая в верхней части выступы для пазов стакана и в нижней части зубчатое колесо с внутренним1« зубьями , для шестерни, а передаточное устройство состоит из тележки, на которой установлена подъемно-опускная балка с двумя крестообразными опорами, одна из которых поворотная, причем отводное устройство состоит из шагового конвейера, имеющего подвижную в горизонтальной и в вертикальной плоскостях раму с крестообразными, опорами и плиты с вырезом для крестообразных опор.
Сбоёо щ /Д/
/ / У /
$l/.J
/ в 7 4f
99
JGff
X
т
(pyf,ff
(ffgJG
