Изобретение относится к гидроакустическим способам обнаружения малых подводных объектов в мелком море - подводных пловцов, малых подводных лодок, подводных скутеров и т.п.
Для обнаружения подводных объектов на определенном морском рубеже используют набор активных гидроакустических станций, устанавливаемых, как правило, на дне, образующих барьерную линию рубежа. С целью уменьшения количества станций, образующих барьерную линию, стремятся увеличить дальность действия каждой станции за счет увеличения ее энергетического потенциала (излучаемой мощности, увеличения направленности излучающих и приемных антенн и т.п.). Для увеличения дальности действия станций используют также разнесение излучения и приема вдоль барьерной линии, т.е. бистатические системы обнаружения. Координаты обнаруженных целей относительно точек расположения станций определяются в таких системах по времени и направлению прихода эхо-сигнала от цели. Дальность действия этих систем, как правило, значительно превышает глубину моря в месте их установки, и надежность обнаружения существенно зависит от гидрологических характеристик моря на трассе распространения сигналов, которые подвержены изменчивости в течение года, времени суток и других факторов. При этом обнаружение эхо-сигналов ведется на фоне поверхностной и донной реверберации, которые существенно затрудняют обнаружение полезного сигнала. Для борьбы с реверберацией в этих системах применяют способы, основанные на уменьшении одновременно озвучиваемого объема, поверхности моря и дна. Это достигается за счет сокращения длительности импульсов, использования направленного, сканирующего в пространстве излучения и приема. Подобный способ применен в "Бистатической-моностатической гидроакустической заградительной системе" по пат. США N 5305286 с приоритетом 21.05.1992 г., а также в размещенном на платформе "Бистатическом гидролокаторе" по пат. США N 5237541 от 21.05.1992 г.
В условиях мелкого моря влияние гидрологии на трассе распространения звука, поверхностной и донной реверберации особенно сильно. Для обеспечения осмотра всего контролируемого водного объема приходится сканировать узкий луч в вертикальной плоскости и по азимуту, что требует сложного устройства сканирования и не обеспечивает постоянное наблюдение всего поля вдоль рубежа.
Известен способ обнаружения малых объектов в мелком море, примененный в "Системе обнаружения пловцов" (справочник Yanes 1995-96 гг., с.105). В этой системе осуществляют ненаправленное или малонаправленное излучение из ряда точек, расположенных на дне на линии охраняемого барьера, принимают эхо-сигналы, отраженные от объектов в этих же точках, и о местоположении объекта судят по координатам приемника, обнаружившего эхо-сигнал. Способ может быть применен на мелководье при довольно частом расположении точек приема-излучения с расстоянием между ними, сравнимым с глубиной (cм. фиг.1.) Способ позволяет исключить влияние изменений гидрологии на распространение звука в зоне обнаружения за счет малой рефракции звука при вертикальном распространении от дна к поверхности.
К недостаткам способа можно отнести образование зон неуверенного обнаружения, в случаях, когда дальность до объекта превышает глубину места установки и обнаружение ведется на фоне поверхностной реверберации, особенно при больших углах падения звука на поверхность, характерных для освещения снизу (cм.фиг.1.) При одновременном излучении из всех активных точек барьерной линии образуются перекрестные помехи, в связи с чем требуется последовательная работа подводных акустических модулей в точках барьерной линии, что также исключает непрерывный контроль пространства.
Таким образом, желательно получить такой способ обнаружения подводных объектов на морском рубеже в мелком море, который обеспечил бы достоверный и непрерывный контроль пространства и исключил бы наличие зон неуверенного приема.
В предлагаемом способе обнаружения подводных объектов на морском рубеже в мелком море так же, как и в известном, излучают направленные в верхнее полупространство гидроакустические импульсы из ряда точек с известными координатами, расположенных на дне на линии рубежа, принимают отраженные от объектов эхо-сигналы в этих же точках и о месте положения объекта судят по координатам приемника, обнаружившего эхо-сигнал.
В обеспечение достоверного и непрерывного контроля пространства без зон неуверенного приема в предлагаемом способе излучение в соседних точках производят на разных частотах и во всех точках одновременно принимают в каждой точке сигнал собственной частоты и по меньшей мере двух других частот от соседних по линии излучателей с каждой стороны, время приема эхо-сигналов ограничивают временем прихода отраженных от поверхности моря импульсов на каждой из принимаемых в данной точке частот, расстояние между соседними точками излучения выбирают равным двойной глубине моря по линии рубежа, а местоположение объекта уточняют по координатам излучателя, работающего на частоте принятых эхо-сигналов.
Повышение достоверности обнаружения достигается за счет того, что прием эхо-сигналов производится только до возникновения мешающего влияния поверхностной реверберации и за счет одновременного излучения в соседних точках зондирующих сигналов разных частот, отличающихся на величину, обеспечивающую возможность фильтрации по частоте принятых эхо-сигналов. Прием эхо-сигналов в каждой точке осуществляется одновременно как минимум на трех частотах: "собственной", частоте соседнего излучателя слева и частоте соседнего излучателя справа по линии барьера. Таким образом, вдоль барьера осуществляется набор чередующихся моностатических и бистатических систем. На фиг.2 показаны условия работы фрагмента барьерной линии с несколькими точками приема-излучения. Зоны уверенного (до поверхностной реверберации) приема для моностатических систем являются сферами радиусов, равных глубине моря. Зоны уверенного приема для бистатических систем являются эллипсоидами с фокусами в точках излучения и приема на одной частоте. Из фиг.2 видно, что зоны неуверенного (на фоне поверхностной реверберации) приема между сферами моностатических систем перекрываются эллипсоидами зон уверенного приема бистатических пар излучатель-приемник, и, таким образом, одновременно контролируется весь водный объем вдоль барьерной линии.
Время, в течение которого принимаются эхо-сигналы без поверхностной реверберации, в моностатической системе Tм определяется глубиной моря в месте установки - H и может изменяться от 0 до  где C - скорость звука в воде.
где C - скорость звука в воде.
Для бистатической пары излучатель-приемник время приема из безреверберационного эллипсоида может изменяться от  до
до  где d - расстояние, равное половине большой оси эллипса.
где d - расстояние, равное половине большой оси эллипса.
Таким образом, ограничивая время приема у моностатического приемника величиной Tм, а у бистатического приемника от  до
до  , мы обеспечим зондирование поля до возникновения мешающего влияния поверхностной реверберации.
, мы обеспечим зондирование поля до возникновения мешающего влияния поверхностной реверберации.
Применение взаимосвязанных моностатических и бистатических систем в способе позволяет уточнить координаты обнаруженного объекта по координатам излучателя, сигнал которого принял приемник на частоте этого излучателя.
Если цель обнаружена только одной моностатической системой, т.е. частота принятого сигнала совпадает с частотой излучателя, расположенного в той же точке, что и приемник, то цель находится в сфере (см. фиг.2) этой системы.
Если цель обнаружена приемником, расположенным в соседней точке с точкой излучателя, излучившего сигналы этой частоты, т.е. только бистатической системой, значит она находится в заштрихованной области между точками нахождения приемника и излучателя данной бистатической пары (фиг. 2).
И, наконец, если цель обнаружена и моностатической и бистатической системами, то координаты цели уточняются по зоне совместного действия моностатической и бистатической систем (фиг. 2).
При разнесенной системе излучение-прием возникает возможность контролировать придонное пространство между излучателем и приемником по непосредственному затенению объектом прямого гидроакустического импульса от излучателя к соседнему приемнику. Если следить за уровнем принятых гидроакустических импульсов, то при изменении этого уровня можно судить о появлении объекта вблизи дна.
На фиг. 1 показаны условия работы малонаправленных излучателей, расположенных в точках на дне и излучающих в верхнее полупространство. На фиг.1 обозначены: 1 - дно, 2 - водная поверхность, 3 - точки приема-излучения, 4 - зона (заштрихована), эхо-сигнал из которой придет к приемникам в точках 3 на фоне поверхностной реверберации (зона неуверенного приема).
На фиг. 2 показаны условия работы фрагмента барьерной сонарной линии, состоящей из нескольких акустических модулей при моностатическом и бистатическом приеме. Обозначения: 6 - сферы моностатических систем, 5 - эллипсоиды бистатических систем.
В точке К-1 излучается частота fK-1, а прием осуществляется на частотах fK-1, fK-2>, fK.
В точке К излучается частота fK, а прием осуществляется на частотах fK, fK-1, fK+1.
В точке К+1 излучается частота fK+1, а прием осуществляется на частотах fK+1, fK, fK+2.
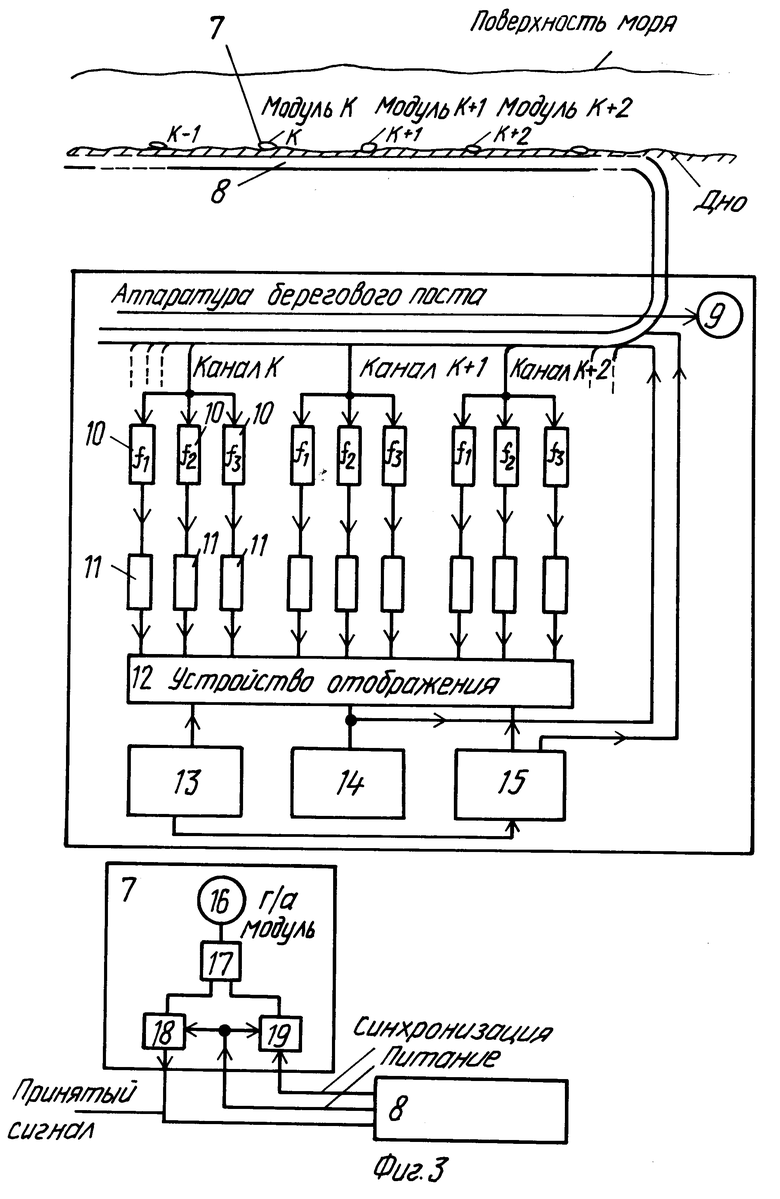
Предлагаемый способ может быть реализован в виде барьерной линии системы обнаружения подводных объектов в мелком море, фрагмент которой изображен на фиг.3.
Барьерная система состоит из N приемно-излучающих гидроакустических модулей 7, расположенных на дне и объединенных кабельной линией связи 8 с аппаратурой берегового поста 9. Каждый из гидроакустических модулей 7 состоит из приемно-излучающей гидроакустической антенны 16, излучающей и принимающей гидроакустические сигналы из верхнего полупространства. Через коммутатор приема- передачи 17, антенна 16 подключена к усилителю входных сигналов 18 и генератору сигналов 19, питание на которые подается от кабельной линии связи от устройства питания берегового поста. Принятые и усиленные усилителем 18 эхо-сигналы передаются по кабельной линии связи 8 в аппаратуру берегового поста 9 от каждого приемника на свой канал обработки, состоящий из набора частотных фильтров 10, где принятые сигналы разделяются по частоте. Затем сигналы каждой из частот поступают на стробирующие устройства 11, которые пропускают сигналы в устройство отображения только в течение времени от момента излучения до момента прихода сигнала, отраженного от поверхности моря на данной частоте.
Устройство отображения 12 представляет оператору принятые эхо-сигналы от всех N приемно-излучающих модулей, на всех рабочих частотах в каждом канале. Оператор при появлении эхо-сигнала в любом из каналов на любой частоте принимает решение об обнаружении и определяет номер канала, принявшего эхо-сигнал, и рабочую частоту, на которой данный сигнал принят. По номерам каналов и сочетанию частот определяется место нахождения обнаруженного объекта. Координаты точек расположения гидроакустических модулей на дне моря определяются при установке модулей.
Для отсчета времени от начала излучения в устройство отображения 9 подаются синхронизирующие импульсы от синхронизирующего устройства 14.
Питание аппаратуры берегового поста и приемно-излучающих гидроакустических модулей осуществляется от устройства питания 15. Устройство управления 13 осуществляет включение и выключение питания и управление работой системы.
Генератор 19 при приходе синхронизирующего импульса по кабельной линии связи 8 от устройства синхронизации 14 генерирует зондирующий сигнал, который через коммутатор приема-передачи 17 поступает на антенну 16 и излучается в море.
В устройстве отображения 12 ведется также наблюдение за уровнем прямого сигнала, принятого на частотах соседних гидроакустических модулей, и, в случае изменения уровня, оператором делается вывод о пересечении объектом пространства между этими модулями вблизи дна.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2366973C1 |
| Бистатический способ обнаружения подводной цели и бистатический гидролокатор | 2018 |
|
RU2694795C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШЕНИЯ РУБЕЖА ОХРАНЫ | 2013 |
|
RU2573259C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2365938C1 |
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2017 |
|
RU2653956C1 |
| КОРАБЕЛЬНАЯ ГИДРОЛОКАЦИОННАЯ СТАНЦИЯ | 2000 |
|
RU2173865C1 |
| Мультистатическая система подводного наблюдения | 2019 |
|
RU2713005C1 |
| СПОСОБ ОБНАРУЖЕНИЯ, РАСПОЗНАВАНИЯ И ВЫТЕСНЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ ОТ МОРСКОЙ НЕФТЕГАЗОВОЙ ПЛАТФОРМЫ | 2010 |
|
RU2434245C2 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ОБНАРУЖЕНИЯ И ВЫТЕСНЕНИЯ ПЛОВЦОВ И МОРСКИХ БИОЛОГИЧЕСКИХ ОБЪЕКТОВ ОТ СИСТЕМЫ ВОДОЗАБОРА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ | 2003 |
|
RU2256196C2 |

Способ обнаружения подводных объектов на морском рубеже в мелком море, в котором излучают направленные в верхнее полупространство гидроакустические импульсы из ряда точек с известными координатами, расположенных на дне на линии рубежа, принимают отраженные от объектов эхо-сигналы в этих же точках и о месте положения объекта судят по координатам приемника, обнаружившего эхо-сигнал, излучают импульсы в соседних точках на разных частотах и во всех точках одновременно, принимают в каждой точке эхо-сигналы собственной частоты и по меньшей мере двух других частот от соседних по линии излучателей с каждой стороны, расстояние между соседними точками приема-излучения выбирают равным двойной глубине моря по линии рубежа, время прихода эхо-сигналов ограничивают временем прихода отраженных от поверхности моря импульсов на каждой из принимаемых в данной точке частот, а местоположение обнаруженного объекта уточняют по координатам излучателей, работающих на частоте принятых эхо-сигналов. Следят за уровнем прямых гидроакустических импульсов, принятых от соседнего излучателя, и при изменении этого уровня судят о появлении объекта вблизи дна. Технический результат заключается в обеспечении достоверности и непрерывности контроля, исключении зон неуверенного приема. 1 з.п. ф-лы, 3 ил.
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ОБЪЕКТОВ ПО АКУСТИЧЕСКОЙ ЖЕСТКОСТИ | 1991 |
|
RU2006877C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ И КООРДИНАТ ПОДВОДНОГО ОБЪЕКТА | 1993 |
|
RU2038615C1 |
| СПОСОБ ПАВЛОВА Ю.К. ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РЫБНЫХ СКОПЛЕНИЙ В ВОДЕ | 1991 |
|
RU2029973C1 |
| РЕДУКТОР ДАВЛЕНИЯ ГАЗА | 1993 |
|
RU2042173C1 |
| КОМБИНИРОВАННЫЙ ТОПЛИВНЫЙ ФИЛЬТР | 2011 |
|
RU2478822C1 |

