Изобретение относится к области гидроакустики, а именно к активным системам подводного наблюдения.
Активные системы подводного наблюдения делятся на моностатические гидролокационные системы (ГЛС-моно) [1], характеризующиеся расположением излучающих и приемных антенн в одной точке пространства, и мультистатические гидролокационные системы (ГЛС-мульти) [2], отличающиеся пространственным разнесением излучающих и приемных антенн.
Достоинствами ГЛС-моно являются меньшая стоимость изготовления и большее удобство эксплуатации, что обусловлено возможностью размещения системы на одном корабле либо в едином корпусе при установке ее в стационарном варианте. Другим достоинством ГЛС-моно является возможность наблюдения (оценивания классов, координат, скоростей и курсов находящихся в контролируемом районе подводных объектов) одной системой подводной обстановки во всем круговом секторе углов. Недостаток ГЛС-моно заключается в меньшей (по сравнению с ГЛС-мульти) дальности обнаружения подводных объектов, что обусловлено большим затуханием зондирующего сигнала (ЗС) при его распространении до объекта и обратно. В результате ГЛС-моно устанавливаются на мобильных морских объектах (подводных лодках, надводных кораблях, подводных аппаратах) либо в виде донных станций, не предназначенных для наблюдения за подводной обстановкой в районах большой площади (примером таких станций является станция обнаружения подводных пловцов).
Достоинством ГЛС-мульти по сравнению с ГЛС-моно является большая дальность обнаружения, обусловленная меньшим путем распространения ЗС при расположении приемной антенны ближе к объекту по сравнению с изучающей антенной. Недостатками ГЛС-мульти являются значительная стоимость изготовления и установки на позицию, а также невозможность одной излучающей и одной приемной антенной осветить подводную обстановку в круговом секторе углов относительно излучателя.
В настоящее время актуальной является задача создания систем подводного наблюдения в районах большой площади, причем как в прибрежных районах, так и в открытом море. Ранее использовавшиеся для этой цели гидролокационные комплексы с широкоапертурными антеннами площадью до 1000 м2 оказались неэффективными ввиду их подверженности преднамеренному противодействию со стороны противника. В последние десятилетия на смену идеологии больших гидролокационных комплексов пришла идеология мультистатических систем подводного наблюдения (МСПН) [2-9]. МСПН включает комплект объединенных сетевой гидроакустической связью (СГС) пункта управления (ПУ) МСПН, а также совместно функционирующих пространственно разнесенных автономных излучающих (ИГС) и приемных (ПГС) гидроакустических станций (фиг. 1). ИГС периодически, по заложенной программе, излучают ЗС, которые отражаются от подводных объектов (далее - объекты) и принимаются ПГС. ПГС обнаруживают отраженные сигналы (эхосигналы - ЭС) и путем их анализа определяют класс подводного объекта, его координаты (пеленг и дистанцию) и параметры движения (курс и скорость). Факт обнаружения объекта, его класс, а также координаты и параметры движения в виде формуляра ПГС при помощи СГС передается на ПУ МСПН. Передача осуществляется в режиме ретрансляции, т.е. каждая ПГС, принявшая формуляр, транслирует его на ближайшие ПГС. В результате ретрансляции формуляр доходит до ПУ.
Достоинствами МСПН являются:
- возможность вести наблюдение за подводной обстановкой в районе большой площади, в том числе за счет увеличения количества ИГС и ПГС;
- высокая устойчивость к преднамеренному противодействию ввиду скрытной установки станций и, как следствие, неизвестности для противника расположения ПГС и трудности выведения из строя всех излучающих станций.
Однако для формирования МСПН необходимо решить две задачи:
- определить минимально необходимое количество ИГС и ПГС, обеспечивающих выполнение требований по обнаружению в любой точке контролируемого района объектов заданных классов с заданной вероятностью (при заданном уровне ложных тревог) в заданных гидроакустических условиях;
- определить позицию каждой ИГС и ПГС.
Способы решения этих задач в источниках не приводятся. Исключение составляет работа [6], однако в ней расстановка ИГС и ПГС рассмотрена только с позиции обеспечения заданной точности определения координат объекта.
В качестве прототипа выберем МСПН, описанную в [4]. Данная МСПН состоит из ИГС и ПГС, объединенных в единую сеть с использованием СГС, по которой данные об обнаруженных подводных объектах передаются на ПУ. Основным недостатком прототипа является отсутствие методики определения количества ИГС и ПГС и географических координат их установки для обеспечения заданной вероятности обнаружения объекта в любой точке контролируемого района при заданной вероятности ложной тревоги.
Решаемая техническая проблема - совершенствование состава и структуры МСПН.
Технический результат - определение минимального количества ИГС и ПГС и географических координат их установки для обеспечения заданной вероятности обнаружения подводного объекта заданного класса при заданной вероятности ложной тревоги при нахождении объекта в любой точке контролируемого района.
Указанный технический результат достигается тем, что вся площадь контролируемого района моря разбивается на примыкающие друг к другу одинаковые квадраты, включающие одну ИГС, расположенную в центре квадрата, и набор ПГС, расположенных внутри квадрата. Количество ПГС и их расположение рассчитываются с учетом выполнения следующих условий:
- в каждой точке квадрата вероятность обнаружения подводного объекта в заданных гидроакустических условиях должна быть не менее заданной вероятности обнаружения;
- площадь квадрата должна быть максимально возможной;
- количество ПГС, размещаемых в квадрате, должно быть минимально возможным.
Для выполнения перечисленных условий предлагается следующий алгоритм расчета количества ПГС и их расположения внутри квадрата:
1) Для случая расположения ИГС, ПГС и объекта на одной прямой линии (фиг. 2) определяются такие значения заглубления антенн ИГС (НИГС) и ПГС (НПГС) и расстояния между ИГС и ПГС (RИГС-ПГС), при которых дальность обнаружения объекта (относительно ИГС) с вероятностью обнаружения Робн была бы максимальной (фиг. 2).
В формализованном виде данная задача состоит в нахождении из уравнения [10]:

таких значений НИГС, НПГС и RИГС-ПГС, при которых величина RИГС-Ц будет максимальной.
В уравнении (1):
Qвых(HИГС, НПГС, RИГС-ПГС, RИГС-Ц) - отношение сигнал/помеха (ОСП) обнаруживаемого объекта как функция НИГС, НПГС, RИГС-ПГС, RИГС-Ц;
Qпор - пороговое ОСП, соответствующее заданным Робн и Рлт, для когерентной обработки эхосигнала рассчитываемое по формуле [10]:

Конкретизируя левую часть уравнения (1), получим [10]:
где
В - база ЗС:
B=ΔƒЗС⋅T
ΔƒЗС - полоса частот ЗС;
ƒЗС - средняя частота ЗС;
Т - длительность ЗС;
РЗС - давление ЗС в полосе ΔƒЗС на оси характеристики направленности (ХН) излучающей антенны, приведенное к 1 м от излучающей антенны;
Rэкв - бистатический эквивалентный радиус подводного объекта;
β - коэффициент пространственного затухания акустического сигнала на частоте ЗС;
A(ƒЗС, НИГС, НЦ, RИГС-Ц) - аномалия распространения ЗС на трассе ИГС - объект;
НЦ - глубина расположения подводного объекта (далее глубина объекта);
АЦ-ПГС (ƒЗС, НЦ, НПГС, RИГС-Ц - RИГС-ПГС) - аномалия распространения ЗС на трассе объект - ПГС.
Решение уравнения (3) осуществляется путем перебора в допустимых пределах значений НИГС, НПГС и RИГС-ПГС с одновременным вычислением значения RИГС-Ц из условия равенства левой и правой частей уравнения.
Исходными данными для расчета являются:
- характеристики объекта: глубина НЦ и бистатический эквивалентный радиус Rэкв;
- вероятность обнаружения объекта в каждой точке контролируемого района Робн и вероятность ложной тревоги Рлт;
- технические характеристики ИГС (тип и геометрические размеры излучающей антенны, средняя частота ЗС ƒЗС, полоса частот ЗС ΔƒЗС, давление РЗС ЗС на оси ХН излучающей антенны, приведенное к расстоянию 1 м от излучателя ИГС, тип зондирующего сигнала);
- технические характеристики ПГС: рабочая полоса частот ΔƒПГС, геометрические размеры и тип антенны (расположение гидроакустических приемников в антенной решетке - по образующей цилиндра, сферы и т.п.);
- гидроакустические характеристики контролируемого района работы: глубина района, вертикальное распределение скорости звука, волнение поверхности моря, коэффициент пространственного затухания акустического сигнала.
2) Определяется максимальное расстояние d между двумя ПГС, равноудаленными от ИГС (фиг. 3), при котором вероятность обнаружения подводного объекта, проходящего между ними, была бы не меньше заданной вероятности обнаружения.
Данная задача решается путем решения относительно d уравнения:
где

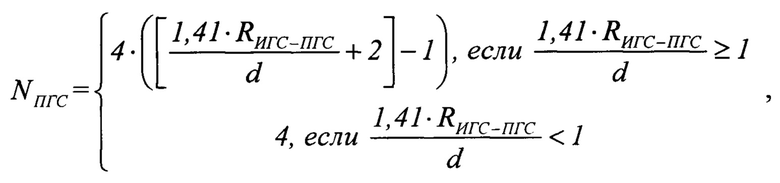
3) Определяется кратное 4-м количество ПГС для установки внутри одного квадрата.

где [x] - операция вычисления наибольшего целого числа, меньшего х.
Из формулы (6) следует, что количество ПГС внутри одного квадрата должно быть кратно четырем.
4) Определяются координаты установки ПГС внутри квадрата (фиг. 4):
- если NПГС=4, ПГС устанавливаются на диагоналях квадрата симметрично ИГС на расстоянии RИГС-ПГС от него;
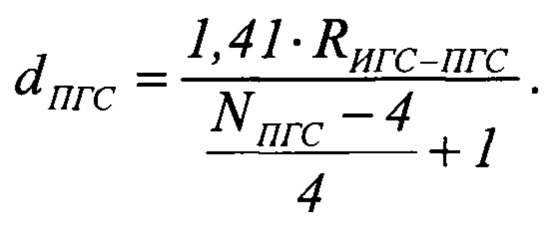
- если NПГС>4, то оставшиеся ПГС (в количестве NПГС - 4) устанавливаются на прямой, соединяющий ближайшие ПГС, в промежутках между ближайшими ПГС, на одинаковом расстоянии dПГС друг от друга, рассчитываемом по формуле

Определяется сторона квадрата L (фиг. 4):

Рассмотрим характерный пример.
Пусть требуется контролировать подводную обстановку в районе, имеющем прямоугольную форму с длинами сторон 85 и 40 км, с вероятностью обнаружения подводного объекта в каждой точке его нахождения в контролируемом районе не менее Робн=0,9 при вероятности ложной тревоги Рлт=10-4.
Гидроакустические условия (ГАУ) соответствуют условиям сплошной акустической освещенности. Вертикальное распределение скорости звука (ВРСЗ) приведено в табл. 1. Волнение моря 4 балла.

Коэффициент пространственного затухания рассчитывается по формуле

Параметры МСПН приняты следующими:
1) характеристики подводного объекта:
- глубина НЦ=75 м;
- бистатический эквивалентный радиус Rэкв=3 м;
2) Характеристики ИГС:
- тип излучающей антенны - цилиндр диаметром 15 см и высотой 20 см;
- частота ЗС ƒЗС=3,0 кГц;
- полоса ЗС ΔƒЗС=400 Гц;
- давление ЗС на оси ХН РЗС=10 кПа (154 дБ);
- зондирующий сигнал представляет собой пачку из 5 импульсов по 40 мс каждый импульс;
3) Характеристики ПГС
- тип приемной антенны - цилиндр с диаметром 2,55 м и высотой 2,4 м;
- рабочая полоса частот 0,5-6 кГц (ее ширина ΔƒПГС=5,5 кГц);
Результаты расчетов:
- оптимальное заглубление антенны ИГС НИГС=125 м;
- оптимальное заглубление антенны ПГС НПГС=100 м;
- оптимальное расстояние между ИГС и ПГС RИГС-ПГС=24,5 км;
- максимальная гарантированная дальность обнаружения подводного объекта (при оптимальных заглублениях антенн, глубине объекта и расстоянии между ИГС и ПГС) RИГС-Ц=32,5 км;
- максимально допустимое расстояние между соседними ПГС, расположенными на расстоянии RИГС-ПГС от ИГС d=46,5 км;
- поскольку d>1,41⋅RИГС-ПГС, то согласно формуле (6) количество ПГС для формирования квадрата NПГС=4;
- длина стороны квадрата L=45,8 км.
Таким образом, каждый квадрат имеет площадь 45,8×45,8 км2 и включает 1 ИГС и 4 ПГС. ИГС расположена в центре квадрата, а ПГС - на диагоналях квадрата на расстоянии 24,5 км от ИГС. Двух таких квадратов оказалось достаточно для покрытия назначенного прямоугольного района площадью 85×40 км2. После виртуального покрытия назначенного района двумя квадратами координаты ИГС и ПГС в системе координат каждого района пересчитываются в географические координаты.
На фиг. 5 приведено результирующее расположение ИГС и ПГС для обеспечения контроля назначенного района с заданной эффективностью.
Таким образом, заявленный технический результат изобретения - определение минимального количества ИГС и ПГС и географических координат их установки для обеспечения заданной вероятности обнаружения подводного объекта заданного класса при заданной вероятности ложной тревоги при нахождении объекта в любой точке контролируемого района - можно считать достигнутым.
Источники информации:
1. Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы. СПб.: Наука, 2004.
2. Коваленко В.В., Корчак В.Ю., Чулков В.Л. Концепция и ключевые технологии подводного наблюдения в условиях сетецентрических войн // Фундаментальная и прикладная гидрофизика, 2011, том 4, №3, стр. 49-64.
3. Пешехонов В.Г., Брага Ю.А., Машошин А.И. Сетецентрический подход к решению проблемы освещения подводной обстановки в Арктике // Известия ЮФУ. Технические науки, 2012, №3, С. 219-227.
4. Коваленко В.В., Корчак В.Ю., Хилько А.И., Чулков В.Л. Требования к сетецентрическим системам подводного наблюдения // Фундаментальная и прикладная гидрофизика, 2014, Т 7, №2, С. 22-26.
5. Машошин А.И. Концепция создания интегрированных сетевых систем подводного наблюдения // Сборник материалов Девятой научно-практической конференции "Перспективные системы и задачи управления, Таганрог, 7-11 апреля 2014, с. 7-16.
6. Михнюк А.Н. Методы повышения эффективности функционирования мультистатической системы подводного наблюдения. Дис. … канд. физ.-мат. наук. М.: Научный центр волновых исследований, 2018.
7. Патент РФ 2364888.
8. Николаев М. Найти невидимку: системы обнаружения субмарин // http://www.popmech.ru/article/5562-nayti-nevidimku.
9. Пичугин С. Состояние и перспективы развития систем гидроакустического наблюдения ВМС США // Зарубежное военное обозрение, 2010, №5 и №6.
10. Зарайский В.А., Тюрин A.M. Теория гидролокации. Л.: ВМА им. А.А. Гречко, 1975. - 604 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Корабль освещения подводной обстановки | 2018 |
|
RU2693767C1 |
| Распределенная система подводного наблюдения | 2020 |
|
RU2741760C1 |
| Способ определения координат и параметров движения подводных объектов при мультистатической гидролокации | 2024 |
|
RU2830066C1 |
| Корабль освещения подводной обстановки | 2022 |
|
RU2803404C1 |
| Бистатический способ обнаружения подводной цели и бистатический гидролокатор | 2018 |
|
RU2694795C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2555192C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2645016C1 |
| ГИДРОАКУСТИЧЕСКАЯ СТАНЦИЯ КОНТРОЛЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2574169C1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЕЙ И ГОРИЗОНТАЛЬНОЙ НАПРАВЛЕННОСТИ ШУМОВ МОРСКОГО НЕФТЕГАЗОВОГО КОМПЛЕКСА | 2011 |
|
RU2480781C2 |
| СИСТЕМА ДЛЯ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538440C2 |
Изобретение относится к области гидроакустики, а именно к мультистатическим системам подводного наблюдения. Решаемая техническая проблема - совершенствование состава и структуры МСПН. Технический результат - определение минимального количества ИГС и ПГС и географических координат их установки для обеспечения заданной вероятности обнаружения подводного объекта заданного класса при заданной вероятности ложной тревоги при нахождении объекта в любой точке контролируемого района. Указанный технический результат достигается тем, что вся площадь контролируемого района моря разбивается на примыкающие друг к другу одинаковые квадраты, включающие одну ИГС, расположенную в центре квадрата, и кратный четырем набор ПГС, расположенных внутри квадрата. Количество ПГС и их расположение рассчитываются с учетом выполнения следующих условий: - в каждой точке квадрата вероятность обнаружения подводного объекта в заданных гидроакустических условиях должна быть не менее заданной вероятности обнаружения при заданной вероятности ложной тревоги; - площадь квадрата должна быть максимально возможной; - количество ПГС, размещаемых в квадрате, должно быть минимально возможным. 2 з.п. ф-лы, 5 ил.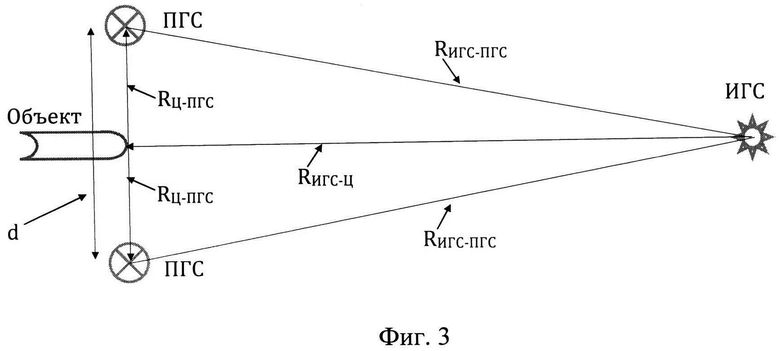
1. Мультистатическая система подводного наблюдения, включающая пункт управления, излучающие гидроакустические станции (ИГС) и приемные гидроакустические станции (ПГС), объединенные сетевой гидроакустической связью, отличающаяся тем, что площадь контролируемого района моря разбивают на примыкающие друг к другу одинаковые квадраты, включающие одну ИГС, расположенную в центре квадрата, и кратное четырем количество ПГС, при этом заглубление антенн ИГС и ПГС, а также их расположение в квадрате рассчитывают исходя из условия максимума площади квадрата в заданных гидроакустических условиях при обеспечении заданной вероятности обнаружения подводного объекта в каждой точке квадрата при заданной вероятности ложной тревоги.
2. Мультистатическая система подводного наблюдения по п. 1, отличающаяся тем, что количество ПГС в квадрате рассчитывают по формуле
где RИГС-ПГС - расстояние между ИГС и ПГС, обеспечивающее максимальную дальность обнаружения с заданной вероятностью обнаружения при заданной вероятности ложной тревоги подводного объекта, находящегося на одной прямой линии с ИГС и ПГС,
d - расстояние между двумя ПГС, находящимися на расстоянии RИГС-ПГС от ИГС, при котором вероятность обнаружения подводного объекта на середине соединяющей их прямой линии равна заданной вероятности обнаружения при заданной вероятности ложной тревоги,
[х] - обозначение операции нахождения ближайшего целого числа, меньшего х.
3. Мультистатическая система подводного наблюдения по п. 2, отличающаяся тем, что четыре ПГС располагают на диагоналях квадрата симметрично ИГС на расстоянии RИГС-ПГС от ИГС, а остальные ПГС, если их общее количество больше четырех, располагают между ближайшими ПГС на соединяющей их прямой на одинаковом расстоянии dПГС друг от друга, рассчитываемом по формуле
| МУЛЬТИСТАТИЧЕСКАЯ АКУСТИЧЕСКАЯ СИСТЕМА И СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВОДНЫХ АППАРАТОВ | 2004 |
|
RU2364888C2 |
| Способ навигации и позиционирования подводных объектов в глубоководном канале на больших дальностях и система для его осуществления | 2018 |
|
RU2674404C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2555192C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2300118C1 |
| АВТОМАТИЗИРОВАННАЯ ПОТОЧНАЯ ЛИНИЯ ДЛЯ УПАКОВКИ РАДИОАКТИВНЫХ ОТХОДОВ | 1992 |
|
RU2012081C1 |

