Изобретение относится к способам определения характеристик профиля рельсов и может быть использовано в процессах рельсошлифования.
Ближайшим аналогом данного изобретения является способ определения параметров поверхности катания головки рельса, описанный Х.Функе "Шлифовка рельсов", М., 1992, сс. 47 - 52.
Известный способ включает перемещение по рельсовому пути измерительной тележки, с расположенными вдоль оси пути датчиками измерения продольного и датчиками измерения поперечного профилей поверхности катания головки рельса, причем последние расположены в плоскости, перпендикулярной оси пути.
Датчики фиксируют отклонение точек поверхности рельса от общей базы измерительной тележки. Полученные данные используют для построения кривых, характеризующих профили рельса.
Проведение измерений через равномерные интервалы времени или пройденного пути служат основой для определения характеристик рельса.
Недостатком известного способа является то, что используемые для построения кривых математические выражения не позволяют точно определять вышеназванные характеристики, поскольку требуют повышенного количества датчиков и их определенного месторасположения, что ограничивает качество и производительность труда в процессе рельсошлифования. Кроме того, известный способ не позволяет проводить прямые измерения в реальном масштабе времени, поскольку данные измерений обрабатываются после прохождения некоторого участка пути.
Задачей представленного изобретения является повышение точности определения параметров поверхности катания головки рельса при меньшем количестве датчиков, а также возможность проведения прямых измерений.
Данный технический результат достигается тем, что в способе определения параметров поверхности катания головки рельса, включающем измерение параметров при помощи перемещения по рельсовому пути датчиков измерения продольного и поперечного профилей головки рельса, фиксацию отклонений точек поверхности рельса по показаниям датчиков от общей базы и осуществление построения профильных кривых поверхности катания рельса по зафиксированным данным, показания датчиков фиксируют в одних и тех же, общих для них, точках пути при их последовательном прохождении, при этом построение кривых осуществляют по формуле (1) и/или (2):

Δy(j)= y
где x - горизонтальная координата по оси пути;
y - вертикальная координата;
z - горизонтальная координата по оси, перпендикулярной оси пути;
i, j, i' = (0, 1, 2, 3...) - индексы, указывающие номер точки, в которой производилось измерение. Индекс i' численно равен i, но обозначает точки, находящиеся на расстоянии l от точек, обозначаемых индексом i;
Y (x) - отклонение по вертикали кривой продольного профиля рельса от горизонтальной линии;
y1, y2 - показания 1-го и 2-го датчиков перемещения;
Y(z) - отклонения по вертикали кривой поперечного профиля рельса относительно оси z горизонтальной плоскости;
Ys(z) - отклонение по вертикали кривой поперечного профиля рельса относительно базы измерительной тележки, регистрируемое системой измерения поперечного профиля;
l - расстояние между 1-м датчиком перемещения и плоскостью установки датчиков системы измерения поперечного профиля;
m - расстояние между 1-м и 2-м датчиками перемещения.
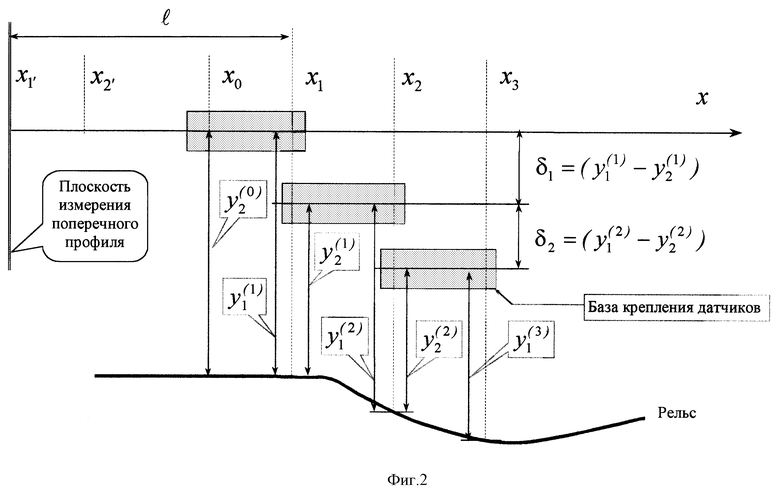
Способ иллюстрируется фиг. 1 и 2 и осуществляется следующим образом. По рельсовому пути перемещают измерительную тележку 9, с установленными на ней двумя датчиками 1 и 2 перемещения, фиксирующими вертикальные отклонения продольного профиля рельса 10. Расстояние между датчиками 1 и 2 равно m, и они подключены к системе 3 построения кривых продольного профиля поверхности катания рельса. На расстоянии l от датчика 1 (первого по направлению движения) в плоскости, перпендикулярной оси пути, расположены датчики 4 системы 5 измерения поперечного профиля (построения профильных кривых) головки рельса.
Перед началом измерений оба датчика 1 и 2 юстируются таким образом, чтобы относительно горизонтальной линии (оси пути) они давали одинаковые показания. Это можно сделать, например, путем введения поправки на показания одного из датчиков. Таким образом, в 1-й точке пути x1 (фиг. 2) отклонение по вертикали продольного профиля от горизонтальной линии равно показанию датчика 1, тем самым определяется ордината нулевой точки по вертикали, относительно которой производится измерение остальных точек продольного профиля Y(i). Во 2-й точке пути x2 ордината продольного профиля Y(2) равна показанию 1-го датчика в точке x2 с коррекцией на разность показаний датчиков 1 и 2 в точке пути x1. Разность показаний датчиков физически представляет собой смещение по вертикали базовой линии (базы крепления датчиков), относительно которой датчики неподвижны, произошедшее при передвижении измерительной тележки 9 из точки пути x1 в точку x2, затем из x2 в x3 и так далее. Таким образом, при данном способе измерений постоянно учитывается смещение базы, что позволяет производить прямые измерения в реальном масштабе времени при движении по рельсовому пути.
Для того, чтобы обеспечить проведение измерений двумя датчиками в одной и той же точке xi, используется датчик пути 6, который через формирователь 7 выдает команды на системы 3 и 5 на проведение измерений после прохождения измерительной тележкой 9 расстояния, равного m. При использовании дискретного датчика пути, повышение точности данного способа достигается за счет выбора расстояния между датчиками при проектировании измерительной тележки кратного единице дискретизации датчика пути.
Учет колебаний базовой линии при измерениях поперечного профиля производится аналогично измерениям продольного профиля. При этом сигналы с датчиков 1 и 2 подаются в систему 5 через согласующие устройства 8, т.к. датчики 4 могут отличаться по принципу действия и выходным сигналам отдатчиков 1 и 2.
Изобретение относится к способам определения характеристик профиля рельсов и может быть использовано в процессах рельсошлифования. Сущность способа заключается в том, что фиксируют показания датчиков измерения продольного и поперечного профилей головки рельса с определением отклонений этих показаний от общей базы. Показания замеряют в одних и тех же общих точках пройденного рельсового пути при их последовательном прохождении. По данным показаний осуществляют построение профильных кривых поверхности катания рельса с помощью математической формулы, связывающей показания датчиков. Техническим результатом данного изобретения является повышение точности определения параметров при меньшем количестве используемых датчиков и возможность проведения прямых измерений в реальном масштабе времени. 2 ил.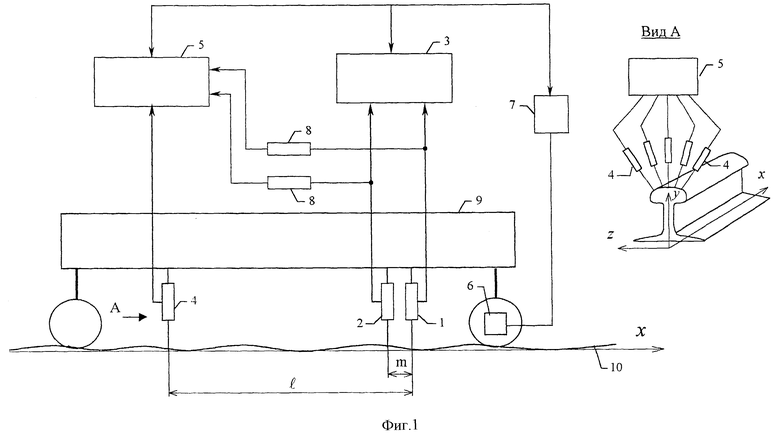
Способ определения параметров поверхности катания головки рельса, включающий измерение параметров при помощи перемещения по рельсовому пути датчиков измерения продольного и поперечного профилей головки рельса и фиксации отклонений точек поверхности рельса по показаниям датчиков от общей базы, после чего по зафиксированным данным осуществляется построение профильных кривых поверхности катания рельса, отличающийся тем, что показания датчиков фиксируют в одних и тех же общих для них точках пути при их последовательном прохождении, а построение кривых осуществляют по формулам

Δy(j)= y
где x - горизонтальная координата по оси пути;
y - вертикальная координата;
z - горизонтальная координата по оси, перпендикулярной оси пути;
i, j, i = (0, 1, 2, 3...) - индексы, указывающие номер точки, в которой производилось измерение: индекс i численно равен i, но обозначает точки, находящиеся на расстоянии l от точек, обозначаемых индексом i;
Y(x) - отклонение по вертикали кривой поперечного профиля рельса от горизонтальной линии;
y1, y2 - показания 1- и 2-го датчиков перемещения;
Y(z) - отклонение по вертикали кривой поперечного профиля рельса относительно оси z горизонтальной плоскости;
Ys(z) - отклонение по вертикали кривой поперечного профиля рельса относительно общей базы, регистрируемое системой измерения поперечного профиля;
l - расстояние между первым датчиком перемещения и плоскостью установки датчиков системы измерения поперечного профиля.
| RU "Шлифовка рельсов" Хайнц Функе | |||
| - М., 1992 | |||
| RU 94011026 A1, 1995 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ РЕЛЬСОВОГО ПУТИ | 1994 |
|
RU2081232C1 |
| Регулируемый индуктивно-емкостный преобразователь источника напряжения в источник тока | 1989 |
|
SU1658330A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕДВИЖЕНИЯ ПО ВОДЕ (ВАРИАНТЫ) | 2009 |
|
RU2392169C2 |
| Магнитный сепаратор для муки или иных подобных материалов | 1934 |
|
SU44885A1 |
