Изобретение относится к области путевого хозяйства железнодорожных дорог, в частности к способу выправки железнодорожного пути в плане, продольном профиле и по уровню и к устройству для его осуществления, и может быть использовано при планово-предупредительной выправке пути и отделке пути перед сдачей в эксплуатацию после производства капитальных путевых работ.
Эффективность и качество выправки пути зависят от достоверности и точности задаваемых параметров устройства рельсовой колеи и расчетных сдвигов и подъемок пути, которые в свою очередь зависят от достоверности и точности информации о натурном положении пути, по которой они рассчитываются. Поэтому усовершенствование систем измерений натурного положения железнодорожного пути, инженерно-информационного обеспечения выправочных работ и управления выправкой пути в настоящее время является важной и актуальной задачей.
Известен способ выправки железнодорожного пути, заключающийся в том, что измеряют положение пути относительно реперов в точках их расположения, определяют положение пути между реперами, определяют соответствующие величины сдвигов и/или подъемок пути по результатам сравнения измерительного и определенного положений пути с проектным и выправляют железнодорожный пути в соответствии с этими величинами сдвигов и/или подъемок пути. Положение пути между реперами определяют при помощи перемещаемого по пути измерительного устройства, которое измеряет криволинейность пути в плане и/или в продольном профиле относительно базы измерительного устройства и/или измеряет возвышения пути по уровню и производят расчет положения пути между реперами в неподвижной системе координат с учетом упомянутого измерения криволинейности пути и/или измерения возвышения пути по уровню (патент RU №2212486 С2, Е01В 35/00, В61К 9/08, от 05.02.2001 г.).
Известно устройство для выправки железнодорожного пути, которое описано в указанном источнике, содержащее подъемно-рихтовочное устройство и соединенное с ним измерительное устройство с датчиками измерения криволинейности пути в плане и/или в продольном профиле относительно базы измерительного устройства и/или измерения возвышения пути по уровню. При этом измерительное устройство снабжено устройством для автоматического определения положения пути относительно репера, размещаемого на обочине железнодорожного пути, и компьютером, с входами которого соединены все упомянутые датчики измерительного устройства и устройством для автоматического определения положения пути относительно репера, а выход компьютера соединен с подъемно-рихтовочным устройством.
Недостатками указанных способа и устройства являются высокая стоимость создания и сопровождения реперной сети с применением трудоемких инструментальных измерений, расчетов проектного положения пути по данным этих измерений и определения координат реперов относительно проектного положения пути. Недостатком способа является то, что перед выправкой пути требуется измерительная поездка с занятием перегона, что резко снижает производительность машинной выправки пути, особенно в короткие «окна» (перерывы в движении поездов).
Наиболее близким аналогом (прототипом) предлагаемого способа и устройства для его осуществления является способ выправки железнодорожного пути в плане, продольном профиле и по уровню и устройство для его осуществления, описанные в Руководстве по эксплуатации «Автоматизированная система съемки, расчетов и выправки пути «НАВИГАТОР», (АС «Навигатор), ВМНИ. 663519.001 РЭ, Научно-инженерный центр «Путеец», г.Новосибирск, 2000 г.).
Известный способ (прототип) заключается в том, что предварительно измеряют характеристики натурного положения рельсовых путей железнодорожного пути в плане, продольном профиле и по уровню, записывают полученные характеристики в память компьютера, при этом сопровождая запись ручным вводом маркеров путевой разметки, т.е. отметок, описывающих положение по длине участка пикетных и километровых знаков, сооружений и устройств, ограничивающих горизонтальные и/или вертикальные перемещения пути. По завершению измерений на заданном участке рассчитывают параметры устройства пути в плане, продольном профиле и по уровню и соответствующие им расчетные перемещения пути - сдвиги в плане и подъемки левого и/или правого рельса в точках измерений с заданным шагом, например 0,625 м. При этом параметры определяются с учетом задаваемых скоростей движения поездов, а сдвиги и подъемки - с учетом ограничений, обусловленных габаритными, техническими и технологическими требованиями.
Далее по вычисленным параметрам и перемещениям пути рассчитывают программные задания, содержащие эталонные значения показаний датчиков ВПР-машины, определяющих заданное положение пути в плане, продольном профиле и по уровню в точках измерений натурного положения пути, и выправляют путь, подавая на подъемно-рихтовочное устройство ВПР-машины управляющие сигналы, соответствующие знаку и величине отклонений показаний датчиков от соответствующих эталонных значений. При этом в моменты расположения измерительной тележки ВПР-машины в точках маркеров текущий индекс программного задания корректируют, получая значение индекса этого маркера, зафиксированного при измерительной поездке.
Известное устройство (прототип) содержит контроллер, измерительное устройство ВПР-машины с датчиками, включая датчики пройденного пути, измерения стрел изгиба в плане и продольном профиле относительно базы измерительного устройства и датчик измерения положения рельсовых нитей по уровню. Устройство также содержит подъемно-рихтовочное устройство ВПР-машины и компьютер, при этом вход контроллера соединен с датчиками измерительного устройства ВПР-машины, выход - с подъемно-рихтовочным устройством ВПР-машины, а компьютер с контроллером.
Указанные известные способ и устройство имеют следующие недостатки:
- измерительные поездки ВПР-машины и расчеты программных заданий, выполняемые в «окно», выделенное для машинной выправки пути, резко снижают ее производительность, особенно при коротких «окнах». Непроизводительные затраты машинного времени при 1-часовом «окне» составляют от 50 до 80% для машин типа ВПР-02 и около 25% для машин непрерывно-циклического действия типа Дуоматик;
- необходимость принятия решений по результатам расчетов выправки пути на перегоне в спешке «окна» снижает их качество, что негативно влияет на качество выправки пути и последующую его работу;
- синхронизация положения ВПР-машины по продольной координате пути при съемке и выправке осуществляют вручную и не всегда выполняется персоналом из-за дефицита времени, что может привести к ошибкам позиционирования машины на пути и, следовательно, к отклонениям от заданного положения;
- устройство АС «Навигатор» и ВПР-машина, на которой оно смонтировано, не имеют технических средств контроля положения ВПР-машины относительно путевой разметки.
Задачами заявленных технических решений способа и устройства для выправки железнодорожного пути в плане, профилю и по уровню являются:
- повышение производительности машинной выправки железнодорожного пути и исключить непроизводительные измерительные поездки ВПР-машин;
- снижение затрат времени «окна» на расчеты выправки пути, которые могут быть выполнены для всех ВПР-машин, централизованно по данным ВПИ;
- ускорение тотальной паспортизации геометрических параметров устройства геометрии рельсовой колеи в плане, продольном профиле и по уровню, которая может быть выполнена по данным ВПИ;
- повышение качества паспортизации параметров за счет централизации расчетов, выполняемых квалифицированным персоналом с использованием необходимой информации об условиях эксплуатации пути и с использованием необходимых баз данных;
- обеспечение автоматической привязки показаний ВПИ и ВПР-машин к продольным координатам пути за счет дублирования существующего пикетажа специальной электронной путевой разметкой.
Сущность предложенного способа заключается в том, что проводят электронную разметку железнодорожного пути путем установки электронных меток по оси пути на каждой пикетной и километровой отметке, устанавливают сканеры этих меток на компьютеризированных вагонах-путеизмерителях и выправочно-подбивочно-рихтовочных машинах, проводят измерения натурного положения пути, оборудованного электронными метками, с помощью перемещаемого по пути компьютеризированного вагона-путеизмерителя, при этом непрерывно отмечают метки, запоминают их идентификационные номера и фиксируют пройденный путь на момент их обнаружения.
После окончания измерительной поездки файлы, содержащие геометрическую информацию и данные по электронным меткам, через доступную систему передачи данных отправляют в централизованный пункт ее обработки, где по данным первого (паспортного) прохода вагона-путеизмерителя по размеченному пути рассчитывают постоянные геометрические параметры состояния (положения) рельсовой колеи в плане, продольном профиле и по уровню (паспорта) и соответствующие им расчетные перемещения пути с малым шагом, например 0,625 м, а также создают базу данных электронных меток, сохраняющую информацию о местоположении (железная дорога, перегон, путь, показатель километра, пикет, направление) каждой метки и о расстоянии между смежными метками.
Далее передают результаты расчетов и базу данных электронных меток через доступную систему передачи данных в диспетчерские центры выправочно-подбивочно-рихтовочных машин (ВПР-машин) и затем посредством носителей информации - на компьютеры ВПР-машин. После чего строят программные задания, учитывающие особенности их контрольно-измерительных систем, и выправляют путь начиная с заданной метки, непрерывно считывая информацию с электронных меток и автоматически корректируя текущий индекс программного задания в момент обнаружения метки, если измеренное расстояние от начальной метки отличается от паспортного, а по данным последующих проходов вагонов-путеизмерителей периодически обновляют информацию о текущих расчетных перемещениях пути и передают ее на ВПР-машины вышеупомянутым способом.
Сущность устройства заключается в том, что устройство для выправки железнодорожного пути в плане, продольном профиле и по уровню содержит контроллер, измерительное устройство ВПР-машины, оборудованное датчиками, включая датчики пройденного пути, измерения стрел изгиба в плане и продольном профиле относительно базы измерительного устройства, измерения положения рельсовых нитей по уровню и дополнительно сканером электронных меток, установленных по оси пути на каждой пикетной и километровой отметке. Устройство также содержит подъемно-рихтовочное устройство ВПР-машины и компьютер, при этом вход контроллера соединен с датчиками измерительного устройства ВПР-машины, выход - с подъемно-рихтовочным устройством ВПР-машины, а компьютер - с контроллером.
К тому же вагоны-путеизмерители (ВПИ) имеют сканеры электронных меток, аналогичные сканерам ВПР-машин, соединенные с контроллером ВПИ, который в свою очередь соединен с бортовым компьютером.
Краткое описание чертежей.
На фиг.1 представлена схема установки электронной метки в железобетонной шпале относительно очередного километрового или пикетного знака, где: «а» - очередной пикетный знак с идентификационным номером «N»; «б» - установка электронной метки непосредственно в железобетонной шпале и «в» - железобетонная шпала с электронной меткой, разрез А-А «б»; на фиг.2 - структурная схема подключения сканера электронных меток к вагону-путеизмерителю; на фиг.3 - структурная схема подключения сканера электронных меток к выправочно-подбивочно-рихтовочной машине.
На чертежах показаны следующие элементы заявленного устройства:
- пикетный знак 1 с номером «N» (фиг.1«а»), электронная метка 2 в железобетонной шпале 3 (фиг.1«б»), залитая компаундом 4 (фиг.1«в»);
- элементы, относящиеся к вагону-путеизмерителю (ВПИ): ходовая тележка 5, сканер 6, контроллер 7, измерительное устройство 8, бортовой компьютер 9 (фиг.2);
- элементы, относящиеся к одной из двух выправочно-подбивочно-рихтовочных машин (ВПР-машине): измерительная тележка 10, сканер 11, контроллер 12, измерительное устройство 13, подъемно-рихтовочное устройство 14 и бортовой компьютер 15.
Общими признаками заявленного способа и прототипа являются:
- измерение параметров состояния рельсов железнодорожного пути в плане, продольном профиле и по уровню с помощью перемещаемого по пути компьютеризированного вагона-путеизмерителя;
- обработка полученной информации;
- проведение расчета параметров состояния пути в плане, продольном профиле и по уровню и соответствующих им расчетных перемещений пути;
- построение программных заданий, содержащих эталонные значения показаний датчиков используемых компьютеризированных выправочно-подбивочно-рихтовочных машин, определяющих заданное положение пути в плане, продольном профиле и по уровню;
- осуществляют выправление пути.
Отличительными признаками заявленного способа от прототипа являются:
- предварительно проводят электронную разметку железнодорожного пути путем установки электронных меток по оси пути на каждой пикетной и километровой отметке;
- на вагоне-путеизмерителе и на каждой выправочно-подбивочно-ритовочной машинах устанавливают сканеры этих меток;
- измерение параметров состояния рельсов железнодорожного пути в плане, продольном профиле и по уровню проводят на пути, оборудованном электронными метками, при этом метки отмечают непрерывно, запоминают их идентификационные номера и фиксируют пройденный путь на момент их обнаружения;
- на стадии проведения расчетов параметров состояния пути в плане, продольном профиле и по уровню и соответствующих им расчетных перемещений пути создают базу данных электронных меток, сохраняющую информацию о местоположении каждой метки и о расстоянии между смежными метками;
- результаты полученных расчетов и базу данных электронных меток передают в диспетчерские центры выправочно-подбивочно-рихтовочных машин и далее на компьютеры этих машин;
- выправляют путь, начиная с заданной метки, непрерывно считывая информацию с электронных меток и автоматически корректируя текущий индекс программного задания в момент обнаружения метки, причем если измеренное расстояние от начальной метки отличается от паспортного, то по данным последующих проходов вагона-путеизмерителя периодически обновляют информацию о текущих расчетных перемещениях пути и передают ее на выправочно-подбивочно-рихтовочные машины.
Общими признаками предложенного устройства от прототипа являются:
- смонтированные в вагоне-путеизмерителе ходовая тележка, измерительное устройство с датчиками пройденного пути, измерения стрел изгиба в плане и продольном профиле и измерения положения рельсовых нитей по уровню, контроллер, бортовой компьютер, при этом вход контроллера соединен с датчиками измерительного устройства, а выход - с бортовым компьютером;
- смонтированные в каждом из двух выправочно-подбивочно-рихтовочных машин измерительную тележку, контроллер, измерительное устройство, подъемно-рихтовочное устройство и бортовой компьютер машины, при этом вход контроллера соединен с бортовым компьютером, а выход - с измерительным и подъемно-рихтовочным устройствами.
Отличительными признаками предложенного устройства являются:
- вагон-путеизмеритель и каждая выправочно-подбивочно-рихтовочная машина дополнительно содержат сканеры электронных меток, установленных на оси железнодорожного пути на каждой пикетной и километровой отметке, при этом сканер вагона-путеизмерителя смонтирован на его ходовой тележке и через контроллер соединен с измерительным устройством и его бортовым компьютером, а сканер выправочно-подбивочно-ритовочной машины смонтирован на ее измерительной тележке и соединен через контроллер с бортовым компьютером машины и с ее измерительным и подъемно-рихтовочным устройствами.
Осуществление изобретения.
Компьютеризированные вагоны-путеизмерители (ВПИ), оборудованные сканерами электронных меток, передают в региональные (дорожные) центры диагностики пути файлы, содержащие геометрическую информацию и информацию о положении по длине пути, считанных с электронных меток идентификационных номеров, которые через систему передачи данных поступают в централизованный пункт обработки этой информации.
В централизованном пункте поступающую информацию обрабатывают в двух режимах: паспортизации и постоянном режиме.
В режиме паспортизации обрабатывают информацию первого прохода ВПИ по участку пути, размеченному электронными метками. В этом режиме рассчитывают геометрические параметры состояния (положения) рельсовой колеи и расчетные перемещения пути в плане, продольном профиле и по уровню, а также создают базы данных электронных меток, сохраняющие уникальные идентификационные номера меток и соответствующие им направление, перегон, путь, километр, пикет и расстояние до смежных меток.
В постоянном режиме обрабатывают информацию последующих проходов, при котором обновляются только расчетные перемещения пути с использованием ранее определенных геометрических параметров рельсовой колеи и баз данных электронных меток.
При обработке путеизмерительной информации используют известные методы цифровой обработки сигналов и программ, отраженные в свидетельстве Роспатента №990967 от 28.12.1999 г. об официальной регистрации программ для ЭВМ, «Расчеты выправки и переустройства железнодорожного пути в плане, продольном и поперечном профиле «Навигатор», зарегистрированном на имя заявителя.
Результаты обработки информации направляют в диспетчерские центры ВПР-машин и далее на носителях информации - на ВПР-машины.
Кроме того, рассчитанные параметры и расчетные перемещения пути поступают в дистанции пути, где принимают решения по корректировкам расчетных перемещений пути, связанным с учетом дополнительных ограничений при построении программных заданий на ВПР-машинах.
Далее путь выправляют, начиная от заданной метки, автоматически отрабатывая программное задание и корректируя его текущий индекс в момент чтения электронных меток, и при этом устанавливают индекс, соответствующий расстоянию от стартовой метки по базе данных электронных меток.
Предлагаемое устройство имеет название «Система высокоточной выправки пути «ВПИ-Навигатор», в которую входит один вагон-путеизмеритель (ВПИ) и две выправочно-подбивочно-рихтовочные машины (ВПР-машины), каждая из которых оборудована сканерами электронной путевой разметки.
Заявленная электронная путевая разметка повторяет существующий визуальный пикетаж. Электронные метки 2 устанавливают на шпалы 3 по оси железнодорожного пути, в ближайшие к километровым или пикетным знакам 1 существующей визуальной путевой разметки шпалы 3 и заливают компаундом 4.
Сканер 6 (фиг.2) электронных меток вагона-путеизмерителя (ВПИ), который представлен в виде фрагмента без указания позиции, устанавливают на ходовой тележке 5 ВПИ и подключают к контроллеру 7, соединенному с измерительным устройством 8 и бортовым компьютером 9 ВПИ.
На каждой выправочно-подбивочно-рихтовочной машине (ВПР-машины), одна из которых представлена на фиг.3 в виде фрагмента без указания позиции, устанавливают на передней измерительной тележке 10 «собственный» (по конструкции аналогичный сканеру ВПИ) сканер 11 электронных меток, который подключают к контроллеру ВПР-машины 12, соединенному с измерительным устройством 13, подъемно-рихтующим устройством 14 и бортовым компьютером 15 ВПР-машины.
Пассивная электронная метка 2, т.е. не имеющая собственного блока питания, при прохождении над ней сканера 6 ВПИ или сканера 11 ВПР-машины активируется и передает через сканер и контроллер 7 ВПИ или контроллер 12 ВПР-машины свой идентификационный номер в компьютер 9 ВПИ или компьютер 15 ВПР-машины, где он запоминается совместно с расстоянием, пройденным на этот момент ВПИ или ВПР-машиной от стартовой позиции, и/или принимает и запоминает передаваемую на нее цифровую информацию.
Предложенный способ выправки железнодорожного пути в плане, продольном профиле и по уровню и устройство для его осуществления позволяют централизованно обрабатывать и эффективно использовать периодически обновляемую путеизмерительную геометрическую информацию о натурном положении пути, строго привязанную к заявленной электронной пикетажной разметке пути для инженерно-информационного обеспечения выправочных работ в масштабах сети железнодорожных дорог на всем протяжении измеряемого всеми компьютеризированными ВПИ пути и построения точных и достоверных программных заданий для ВПР-машин любого типа, осуществляющих выправку на произвольных участках пути без измерительных поездок с привязкой к продольным координатам пути, что способствует достижению всех поставленных вышеуказанных задач.
В конце 2006 г. заявленный способ и устройство успешно прошли испытания в промышленных условиях в системе высокоточной выправки пути «ВПИ-Навигатор», по результатам которых они рекомендованы к постановке на производство и внедрения на железных дорогах РФ (акт приемочных испытаний и протокол к нему прилагаются).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОВЕДЕНИЯ РЕМОНТОВ И РЕКОНСТРУКЦИИ ЖЕЛЕЗНОДОРОЖНОЙ ИНФРАСТРУКТУРЫ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ МОДЕЛИ ПУТИ | 2011 |
|
RU2465385C1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2001 |
|
RU2212486C2 |
| Способ выправки железнодорожного пути и устройство для его осуществления | 2023 |
|
RU2824765C1 |
| УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2013 |
|
RU2551637C2 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
| Информационно-управляющая система перемещения рельсов, шпал и балласта для обеспечения работоспособности железнодорожного пути по заданным критериям | 2020 |
|
RU2738026C1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2001 |
|
RU2230848C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2002 |
|
RU2226672C2 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1996 |
|
RU2098538C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ ШПАЛОПОДБИВОЧНЫХ МАШИН | 2018 |
|
RU2704764C1 |


Изобретения относятся к области путевого хозяйства железнодорожных дорог, в частности к способу выправки железнодорожного пути в плане, продольном профиле и по уровню и к устройству для его осуществления, и могут быть использованы при планово-предупредительной выправке пути и отделке пути перед сдачей в эксплуатацию после производства капитальных путевых работ. Способ выправки железнодорожного пути в плане, продольном профиле и по уровню заключается в том, что предварительно проводят электронную разметку железнодорожного пути путем установки электронных меток по оси пути на каждой пикетной и километровой отметке, а на вагоне-путеизмерителе и на каждой выправочно-подбивочно-ритовочной машине устанавливают сканеры этих меток. Измерение параметров состояния рельсов железнодорожного пути в плане, продольном профиле и по уровню проводят на пути, оборудованном электронными метками. Метки считывают непрерывно, запоминают их идентификационные номера и фиксируют пройденный путь на момент их обнаружения. На стадии проведения расчетов и соответствующих им расчетных перемещений пути создают базу данных электронных меток, сохраняющую информацию о местоположении каждой метки и о расстояниях между смежными метками. Результаты полученных расчетов и базу данных электронных меток передают в диспетчерские центры выправочно-подбивочно-рихтовочных машин и далее на компьютеры этих машин. Выправляют путь, начиная с заданной метки, непрерывно считывая информацию с электронных меток и автоматически корректируя текущий индекс программного задания в момент обнаружения метки, если измеренное расстояние от начальной метки отличается от паспортного. По данным последующих проходов вагона-путеизмерителя периодически обновляют информацию о текущих расчетных перемещениях пути и передают ее на выправочно-подбивочно-рихтовочные машины. Техническим результатом изобретений является повышение производительности машинной выправки железнодорожного пути, снижение затрат времени «окна» на расчеты выправки пути, ускорение тотальной паспортизации геометрических параметров устройства геометрии рельсовой колеи и повышение ее качества, обеспечение автоматической привязки показаний ВПИ и ВПР-машин к продольным координатам пути за счет дублирования существующего пикетажа специальной электронной путевой разметкой. 2 н.п. ф-лы, 3 ил.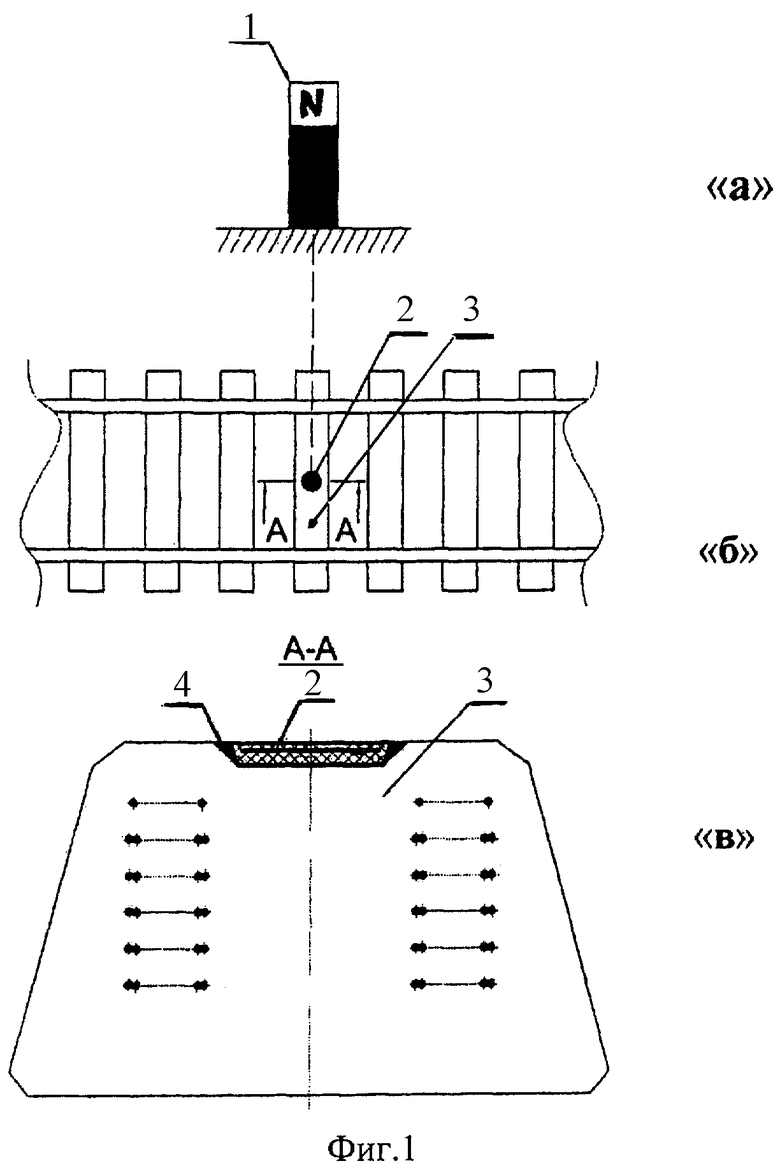
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2001 |
|
RU2212486C2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114950C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ПОПЕРЕЧНОГО ПРОФИЛЯ ИЛИ РАССТОЯНИЯ МЕЖДУ РЕЛЬСАМИ ПУТИ | 2003 |
|
RU2255873C1 |
| WO 9411705 A1, 26.05.1994 | |||
| Способ масс-спектрометрического анализа химических соединений | 1983 |
|
SU1270814A1 |

