Изобретение относится к гироскопической технике, в частности к системам управления объектов, движущихся в пространстве.
Известна бесплатформенная инерциальная навигационная система [1,2] , содержащая измерители линейных ускорений или скоростей, датчики угловых скоростей, вычислительное устройство.
Наиболее близким техническим решением является бесплатформенная инерциальная навигационная система, содержащая блок датчиков линейных ускорений или скоростей, блок датчиков угловых скоростей, вычислитель вектора состояния объекта, входы которого связаны с блоком датчиков угловых скоростей и блоков датчиков линейных ускорений или линейных скоростей [3] .
Недостатком описанных БИНС является то, что абсолютная ошибка при программном развороте объекта нарастает пропорционально углу разворота, что приводит к ужесточению требований к точности масштабного коэффициента ДУС.
Целью изобретения является повышение точности в режимах программных разворотов.
Цель достигается тем, что в бесплатформенную инерциальную навигационную систему, содержащую блок датчиков линейных ускорений или линейных скоростей, блок датчиков угловых скоростей и вычислитель вектора состояния объекта, входы которого связаны с блоком датчиков угловых скоростей и блоком датчиков линейных ускорений или линейных скоростей, в нее введены программные механизмы углового разворота, число которых соответствует числу датчиков угловых скоростей в блоке датчиков угловых скоростей, каждый программный механизм программного разворота кинематически связан с соответствующим датчиком угловой скорости, вход каждого из программных механизмов программного разворота связан с выходом вычислителя вектора состояния объекта.
На чертеже представлена функциональная схема бесплатформенной инерциальной навигационной системы, где приняты следующие обозначения:
1 - вычислитель вектора состояния;
2 - блок датчиков линейных ускорений или линейных скоростей,
3 - блок датчиков угловых скоростей;
4 - программные механизмы углового разворота.
Бесплатформенная инерциальная навигационная система (БИНС) содержит блок датчиков линейных ускорений или линейных скоростей 2 и блок датчиков угловых скоростей 3, вычислитель вектора состояния 1, соответствующие входы которого связаны с выходами блока датчиков линейных ускорений или линейных скоростей 2 и блока датчиков, угловых скоростей 3, причем каждый из датчиков угловой скорости в блоке датчиков угловых скоростей 3 кинематически связан с соответствующим программным механизмом углового разворота 4, входы каждого из которых соединены с соответствующим выходом вычислителя вектора состояния 1.
Устройство работает следующим образом.
При движении объекта, снабженного системой стабилизации, по заданной траектории с БИНС определяется недетерминированная погрешность смещения "нуля" ДУС 3i/i = 1,2,3). При программном изменении траектории движения объекта программные механизмы 4i разворачивают ДУС 3i на требуемый программный угол разворота с обратным знаком. При этом программная угловая скорость, измеряемая ДУС 3i близка к нулю за счет стабилизации углового положения объекта, т. е. тем самым ДУС 3i работает в малом диапазоне угловых скоростей, в то время как объект может поворачиваться со скоростями, равными угловой скорости программного механизма 4i.
При включении ДУС 3i в контур обратной связи системы автоматического регулирования объекта вычислитель вектора состояния I формирует сигнал обратной связи Uхi = Fi (Uвыхi), Fi(Uвыхi) - управляющий функционал, формируемый таким образом, что обеспечивается равенство нулю интеграла от выходного сигнала ДУС 3i.

 dt = 0 Подставляя значения выходного сигнала ДУС 3i Uвыхi= KiДУС(ϕi-ϕoi) в формулу (I), получаем:
dt = 0 Подставляя значения выходного сигнала ДУС 3i Uвыхi= KiДУС(ϕi-ϕoi) в формулу (I), получаем: (
( -
- )dt = 0
)dt = 0 dt =
dt =  dt
dt
ϕi= ϕoi , где ϕi - угол разворота объекта по соответствующей оси;
ϕoi - угол программного разворота, на который разворачивается ДУС 3i программным механизмом 4i по соответствующей оси i. Тем самым точность программного разворота будет сведена к точности измерения смещения "нуля" за время движения объекта.
Введение в известную БИНС программного механизма разворота позволяет устранить влияние масштабного коэффициента КДУС на точность программного разворота объекта, так как в существующей БИНС абсолютная ошибка разворота нарастает пропорционально углу разворота, что позволяет повысить точность программного разворота объекта, уменьшить требования к точности масштабного коэффициента КДУС ДУС, следовательно снизить его себестоимость. (56) Бычков С. И. и др. Лазерный гироскоп. М. ; Сов. радио, 1975.
Раушенбах Б. В. и др. Управление ориентацией космических аппаратов. М. ; Наука, 1974.
Лукьянов Д. П. и др. Генеральные навигационные системы морских объектов. Л. : Судостроение, 1989, с. 88.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241959C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2313067C2 |
| СПОСОБ КАЛИБРОВКИ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334947C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПОСЛЕ СБОЯ АППАРАТУРЫ | 2020 |
|
RU2754128C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО АППАРАТА, ПОДВЕШЕННОГО К САМОЛЕТУ-НОСИТЕЛЮ | 2014 |
|
RU2553776C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАЧАЛЬНОЙ ВЫСТАВКИ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО БЛОКА ОТНОСИТЕЛЬНО БАЗОВОЙ СИСТЕМЫ КООРДИНАТ | 2004 |
|
RU2279635C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634071C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2014 |
|
RU2564379C1 |
| Способ выставки БИНС ЛА корабельного базирования и устройство для его осуществления | 2016 |
|
RU2635398C2 |
| Способ астроинерциальной ориентации и устройство для его осуществления | 2022 |
|
RU2836748C2 |
Изобретение относится к гироскопической технике, в частности к системам управления объектов, движущихся в пространстве. Целью изобретения является повышение точности в режимах программных разворотов. Цель достигается тем, что в бесплатформенную инерционную навигационную систему, содержащую блок датчиков линейных ускорений и/или скоростей 2, блок датчиков угловых скоростей (ДУС) 3, вычислитель вектора состояния 1, введены программные механизмы углового разворота ДУС 3 вокруг их осей чувствительности относительно корпуса объекта, назначением которых является разворот ДУС 3 по сигналу вычислителя состояния объекта 1 на углы, соответствующие углам разворота объекта. 1 ил.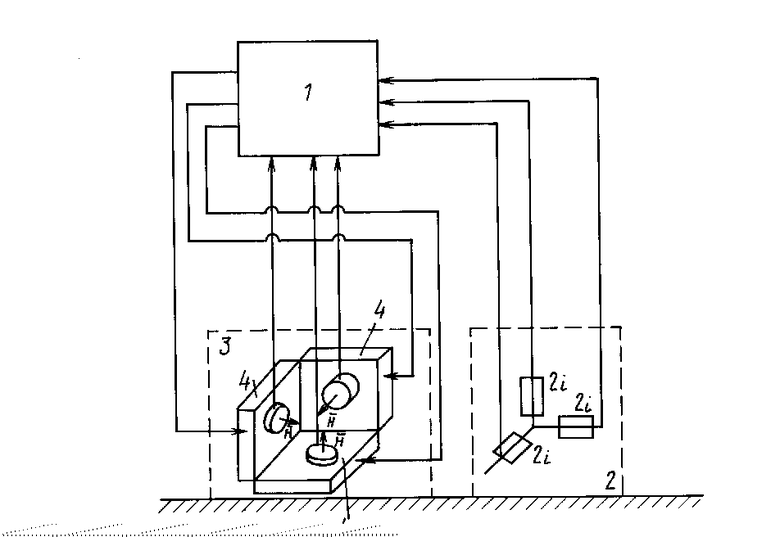
БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА, содержащая блок датчиков линейных ускорений или линейных скоростей, блок датчиков угловых скоростей и вычислитель вектора состояния объекта, входы которого связаны с блоком датчиков угловых скоростей и блоком датчиков линейных ускорений или линейных скоростей, отличающаяся тем, что, с целью повышения точности в режимах программных разворотов, в нее введены программные механизмы углового разворота, число которых соответствует числу датчиков угловых скоростей в блоке датчиков угловых скоростей, каждый программный механизм программного разворота кинематически связан с соответствующим датчиком угловой скорости, вход каждого из программных механизмов программного разворота связан с выходом вычислителя вектора состояния объекта.
