Изобретение относится к управляемым пальцами многофункциональным манипуляторам, устанавливаемым на рычагах управления летательными аппаратами (ЛА). В частности, оно может быть использовано для взаимодействия с объектами в трехмерном пространстве без отрыва рук от рычагов управления (концепция "HOTAS") различными аппаратами: летательными, наземными, подводными и надводными.
В настоящее время реализация концепции HOTAS идет по пути увеличения количества и номенклатуры оперативных органов управления (ООУ) на рычагах управления ЛА как для левой, так и для правой руки летчика. Благодаря развитию технологий миниатюризации: в области точной механики, небольших размеров датчиков и электроники (микрочипы), появилась возможность разместить на рукоятке рычагов управления летательным аппаратом (ЛА) 5 - 6 органов управления, а на рычаге управления визорными системами и вооружением до 10 ООУ (т. е. всего 20 ООУ). Наиболее ярким представителем такого подхода являются рычаги летчика и оператора на вертолете Longbow (фирмы McDonnell Douglas), разработанные фирмой Mason Electric Co.
Такая большая номенклатура ООУ позволяет наилучшим образом (например, по критерию "быстродействие - точность - безошибочность") решать большое разнообразие задач, для каждой из которых существует свой, оптимальный ООУ.
Однако, данный подход к реализации концепции HOTAS имеет и серьезные недостатки. По существу на рукоятке может быть удобно расположен только один ООУ с учетом обеспечения его необходимых отклонений для эффективного управления. В результате из-за необходимости неосознанного перехвата рукоятки при смене ООУ снижается точность пилотирования ЛА и оперативность управления бортовым комплексом (возникают дополнительные задержки). В задачах слежения подвижным маркером (ПМ) за объектом не обеспечивается "безударность" перехода с одного способа управления им к другому (от более грубого на больших перемещениях к более точному в ограниченных зонах). На рукоятках отсутствуют ООУ, имеющие функциональные свойства, аналогичные известным компьютерным манипуляторам типа "Trackball" (с безграничным изменением выходной величины с двумя или тремя степенями свободы). Эти манипуляторы уже доказали свою высокую эффективность при работе через графический интерфейс на персональном компьютере. Управление бортовым комплексом через иерархическое меню и 3-D и 2-D графика, свойственное персональному компьютеру, будут использоваться и на борту ЛА.
Очевидно, что для устранения указанных недостатков необходимо создать один комбинированный оперативный орган управления (КООУ), соответствующим образом объединяющий функции известных простейших ООУ, и обеспечить многофункциональность его использования, например, за счет автоматического изменения возлагаемых на него функций при последовательном выполнении действий летчиком. При этом возможности по степеням свободы КООУ должны перекрывать возможности простейших ООУ.
Предлагаемое техническое решение по существу является дальнейшим развитием концепции "HOTAS", а именно, управление ЛА осуществляется без отрыва пальцев рук от рычагов, кроме двух (большого и указательного).
Концепция "HOTAS" широко реализована для управления в авиационных компьютерных играх. Известен ООУ, установленный на устройстве под названием "Thrustmaster Gaer", используемом в качестве РУДа в авиационных игрушках. Однако, этот ООУ объединяет только две функции: "Thumbwheel" ("бегункового колеса") и кнопки.
Близким к предлагаемому КООУ по технической сущности и достигаемому результату является изобретение под названием "Манипулятор для управления объектами в моделируемых на ЭВМ пространствах" (заявка 94020862, кл. G 06 F 3/033, 1994 г.), который состоит из головки, соединенной штоком с планшетом. По принципу действия он представляет собой джойстик: три поступательные степени свободы (движения планшета влево-вправо по плоскости и всей головки вверх-вниз вдоль оси штока), головка которого содержит минимум одну кнопку, имеет еще три степени свободы (наклон влево-вправо и вращение вокруг оси штока). Все степени свободы имеют датчики перемещений и концевые микровыключатели.
Наиболее близким к предлагаемому КООУ по технической сущности и достигаемому результату является изобретение под названием "Joystick type multifunctional controller" (патент US 6059660, кл. 7 A 63 F 9/24, 9.05.2000), который состоит из головки, соединенной штоком с узлом вращения в двух плоскостях. По принципу действия представляет собой джойстик, имеющий две вращательные степени свободы (поворот всего джойстика, точнее его штока влево-вправо) и еще две: перемещения головки вверх-вниз вдоль оси штока и ее вращение вокруг оси штока, реализующее функцию дискретного "Thumbwheel".
Использование режима дискретного "Thumbwheel" принципиально не отличается от его непрерывного аналога, так как угол поворота головки КООУ пальцами на самом деле имеет порог чувствительности, т.е. является также дискретным, а мягкая фиксация кольца не мешает непрерывности управления. Кроме того, "Thumbwheel" целесообразно использовать по своему основному назначению для дискретного управления: режимами работы комплекса посредством иерархического меню с выбором альтернативных вариантов, для дискретного ввода и регулировки числовых значений параметров (уровней) с заданным шагом, для ввода букв и цифр способом "вращающаяся клавиатура".
Основным недостатком аналогов и прототипа КООУ является отсутствие реализации функций такого ООУ, как "Trackball".
Изобретение позволит расширить функции КООУ, повысить оперативность и качество управления ранее решаемых задач, повысить точность, быстродействие, безошибочность работы оператора практически без увеличения размеров КООУ (только за счет небольшого увеличения высоты головки).
Сущность изобретения состоит в правильном комбинировании нескольких независимых степеней свободы управления в одном устройстве (КООУ) с учетом физиологических особенностей пальцев.
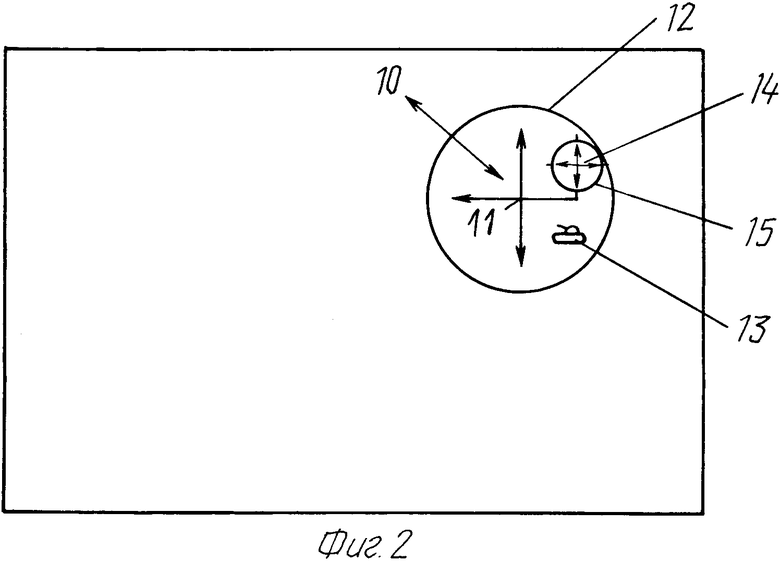
Указанная цель достигается тем (см. фиг.1), что комбинированный оперативный орган управления для пальцев состоит из двух джойстиков, первый (I) из которых имеет две вращательные степени свободы (1, 2), а его головка имеет одну вращательную степень свободы вокруг оси штока джойстика (3) и одну поступательную вдоль оси штока (4), причем, на головку первого джойстика установлен второй джойстик (II), имеющий две поступательные степени свободы перпендикулярно оси штока (5, 6), головкой которого служит "Trackball" (III), имеющий две степени свободы вращения шарика (7, 8) и одну поступательную (9) за счет возможности перемещения шарика вдоль оси штока.
Таким образом, основными новыми возможностями является бесконечное изменение любых двух величин с помощью функций КООУ "Trackball" с реализацией оптимальной чувствительности управления по каждой из них. Универсальные функции "Trackball" хорошо использовать (так же как "Mouse") для графического ввода данных, выбора объектов, непрерывного слежения за подвижными объектами, позиционирования курсора.
На фиг.1 представлен общий вид КООУ:
I - первый джойстик со степенями свободы 1, 2, 3, 4;
II - второй джойстик со степенями свободы 5, 6;
III - "Trackball" со степенями свободы 7, 8, 9;
1, 2 - вращательные степени свободы первого джойстика;
3 - вращательная степень свободы головки первого джойстика;
4 - поступательная вертикальная степень свободы первого джойстика (и всего КООУ в целом);
5, 6 - поступательные горизонтальные степени свободы второго джойстика;
7, 8 - вращательные степени свободы "Trackball" головки второго джойстика;
9 - поступательная вертикальная степень свободы шарика "Trackball".
Фиг. 2 иллюстрирует возможность использования КООУ для взаимодействия с объектами в трехмерном пространстве:
12 - поле технического зрения визорной системы;
11 - степень свободы движения поля 12;
10 - степень свободы для изменения размеров поля 12;
15 - подвижный маркер;
14 - степень свободы движения маркера внутри поля 12;
15 - объект в трехмерном пространстве.
КООУ по существу комбинирует (системно интегрирует) функции следующих простейших ООУ:
1. Головка КООП (II) - это двухстепенной джойстик (2-D) без фиксации нейтрального положения, при поступательном перемещении которого в стороны (5, 6) в нем возникают усилия типа сухого трения и демпфирования.
2. Расположенный внутри головки вращающийся в двух плоскостях (7, 8) шарик - это типичный "Trackball" (III), а нажатие вниз (9) шарика до упора с дополнительным усилием для срабатывания микровыключателя - кнопка.
3. Вся головка вращается вокруг штока (3) и имеет фиксированные положения - это дискретный "Thumbwheel".
4. Головка крепится к штоку, который имеет возможность поворачиваться в двух взаимно перпендикулярных плоскостях (1, 2). Полученная конструкция (I) работает как еще один двухстепенной джойстик (2-D) с фиксацией нейтрального положения и формированием усилий при его повороте типа сухое трение, демпфирование, "нелинейная пружина".
5. При нажатии его до упора в стороны с дополнительным усилием замыкаются микровыключатели в одном из четырех или восьми сегментах, симметрично расположенных по окружности - скользящий переключатель.
6. Фиксируется нажатие головки вниз (4) до упора с дополнительным усилием и вытягивание ее вверх для срабатывания концевых микровыключателей - выключатель типа "тяни-толкай". Для удобного ее вытягивания двумя пальцами головка выполнена в виде перевернутого конуса.
Высокое качество управления обеспечивается независимостью управления по каждой из перечисленных степеней свободы путем правильного согласования динамических характеристик управления и "усилий страгивания" по отдельным степеням свободы:
1. Сила вращения шарика должна быть меньше, чем сила, необходимая для поступательного перемещения головки (II). При нажатии на головку палец надавливает на шарик и отсоединяет его от датчиков, тем самым отключает функцию "Trackball".
2. Максимальная сила нажатия (9) на шарик до упора для замыкания микровыключателей должна быть меньше, чем начальная сила страгивания всей головки при ее движении вниз (4) вдоль штока.
3. Сила, развиваемая при поступательном перемещении головки перпендикулярно штоку (5, 6), должна быть меньше, чем начальная сила, необходимая для поворота штока (1, 2), и только при выходе головки на упор происходит поворот штока.
4. Головка имеет боковые насечки, что увеличивает ее сцепление с пальцами, что при ее вращении (3) двумя пальцами (большим и указательным) обеспечивает отсутствие сил для наклона штока (1, 2).
КООП желательно устанавливать на ограниченно подвижном основании (например, на РУДе). Оно должны иметь рукоятку пистолетного типа, за которую летчик держится не менее, чем тремя пальцами. В этом случае большой и указательный пальцы остаются свободными и могут использоваться в случае необходимости для управления КООУ.
Конструктивное исполнение КООП может быть самым разнообразным с использованием различного типа датчиков перемещения и микровыключателей. Однако, в качестве варианта конструктивного решения "Trackball" целесообразно использовать патент US 5758054 и US 5541621, для поворота всего КООП патент US 6121955, а для оставшихся конструктивных узлов поступательного перемещения головки использовать аналог заявки RU 94020862, а вращательного узла вокруг оси штока и вертикального перемещения вдоль штока использовать прототип патента US 6059660.
Наибольшую эффективность следует ожидать от применения изобретения для взаимодействия с объектами в трехмерном пространстве. Устройство работает следующим образом (см. фиг.1 и 2):
1. Двумя пальцами поворачивают головку (I) вокруг оси штока джойстика для выбора размеров поля (10) технического зрения различных визорных систем.
2. Подушечкой большого пальца вращают (7, 8) "Trackball" (III) для кругового поиска объекта в пространстве с перемещением (11) зоны обзора (12).
3. После обнаружения объекта (13) снова вращают (3) головку (I) для оптимизации размеров (10) зоны поля зрения (12).
4. Большим пальцем (при утопленном шарике "Trackball" (9)) поступательно перемещают (5, 6) головку для наведения (14) подвижного маркера (15) на объект (13), используя при этом способ управления "по положению". Одновременно с выходом маркера (15) (и объекта (13) вместе с ним) на границу выбранной зоны поля зрения (12) происходит достижение головкой (II) упора.
5. Поэтому дальнейшее наведение на объект (13) с прикладыванием боковых усилий к головке (II) происходит с наклоном всего КООП (1, 2) и переходом на управление подвижным маркером (15) "по скорости" с одновременным смещением (11) зоны поля зрения (12) в направлении движения маркера (14). Таким образом внутри зоны (12) всегда происходит управление маркером "по положению", а на границе зоны (12) - "по скорости".
6. При точном наведении маркера (15) на объект (13) нажатием на головку (4) осуществляется его целеуказание, а вытягиванием головки (4) двумя пальцами - отмена этого действия или перевод всей системы в исходное положение при повторном вытягивании.
Таким образом, взаимодействие с объектом (см. фиг.1 и 2) можно условно разделить на три фазы: очень грубое - наведение на него зоны (12) с помощью "Trackball" (7, 8), грубое - наклоном всего КООП (1, 2) с управлением скоростью перемещения зоны (11) и точное - наведением подвижного маркера (15) поступательным перемещением (5, 6) головки КООП (II) с управлением "по положению". Обеспечивается возможность автоматического переключения с управления "по положению" к управлению "по скорости" (и наоборот) при выходе на упор головки (II). Следует особо отметить, что выбором размеров зоны (10) вращением (3) головки (I) определяется оптимальная чувствительность управления по всем степеням свободы КООП (1, 2, 5, 6, 7, 8). Все это существенно повышает точность, быстродействие и безошибочность всего процесса взаимодействия с объектом без отрыва рук от рычагов управления аппаратом.
Изобретение относится к управляемым пальцами многофункциональным манипуляторам, устанавливаемым на рычагах управления летательными аппаратами. Техническим результатом является расширение функций комбинированного оперативного органа управления, повышение оперативности и качества управления, а также повышение точности быстродействия и безошибочности работы оператора. Технический результат достигается за счет того, что комбинированный оперативный орган управления для пальцев состоит из двух джойстиков, первый из которых имеет две вращательные степени свободы, а его головка имеет одну вращательную степень свободы вокруг оси штока джойстика и одну поступательную вдоль оси штока, на головку первого джойстика установлен второй джойстик, имеющий две поступательные степени свободы перпендикулярно оси штока, головкой которого служит ТРЕКБОЛ, имеющий две степени свободы вращения шарика и одну поступательную за счет возможности перемещения шарика вдоль оси штока. 2 ил.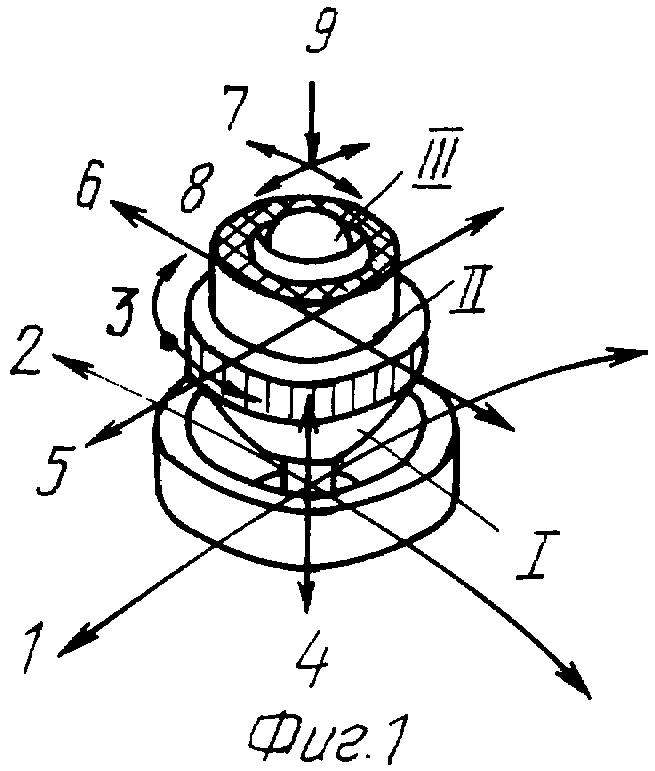
Комбинированный оперативный орган управления для пальцев состоит из двух джойстиков, первый из которых имеет две вращательные степени свободы, а его головка имеет одну вращательную степень свободы вокруг оси штока джойстика и одну поступательную вдоль оси штока, отличающийся тем, что на головку первого джойстика установлен второй джойстик, имеющий две поступательные степени свободы перпендикулярно оси штока, головкой которого служит ТРЕКБОЛ, имеющий две степени свободы вращения шарика и одну поступательную за счет возможности перемещения шарика вдоль оси штока.
| US 6059660 А, 09.05.2000 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ КОНСЕРВИРОВАННОГО ПРОДУКТА "СИЧЕНИКИ РЫБНЫЕ УКРАИНСКИЕ" | 2007 |
|
RU2347487C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ С АНАЛОГОВЫМ ДЖОЙСТИКОМ (ВАРИАНТЫ) | 1996 |
|
RU2163159C2 |
| СИСТЕМА ОБРАБОТКИ ИЗОБРАЖЕНИЯ С АНАЛОГОВЫМ ДЖОЙСТИКОМ | 1996 |
|
RU2155368C2 |
| US 5786807 A, 28.07.1998 | |||
| US 5781180 А, 14.07.1998 | |||
| US 5774114 А, 30.06.1998. | |||
