Изобретение относится к области вооружения, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения.
Известна система наведения управляемого снаряда [1], содержащая гироскоп инерциальный (ГИ), рулевой привод (РП) и головку самонаведения (ГСН), включающую фотоприемное устройство, усилители релейной и линейной следящих систем, пороговые устройства релейной и линейной следящих систем, схему ИЛИ, схемы суммарно-разностной обработки, пиковые детекторы, сумматор, селектор, формирователь выходных сигналов, схему нормирования, логическую схему, усилитель мощности, схему ШИМ, усилительно-преобразовательные элементы, обмотки катушек коррекции и обмотку компенсации веса с соответствующими связями, выход "Захват" которой соединен с первым входом первого элемента И и через инвертор с первым входом второго элемента И, вторые входы которых соединены соответственно с вторым и третьим выходами гироскопа инерциального, выход первого элемента И соединен с входом "Компенсация" ГСН и с третьим входом первого элемента ИЛИ, второй вход которого соединен с первым выходом гироскопа инерциального, а его выход - с входом первого усилителя мощности, выход второго элемента И соединен с вторым входом второго элемента ИЛИ, выход второго элемента ИЛИ соединен с входом второго усилителя мощности, выходы головки самонаведения "-Y" и "+Y" соединены с первыми входами первого и второго элементов ИЛИ соответственно, выходы головки самонаведения "+Z" и "-Z" соединены с входами третьего и четвертого усилителей мощности соответственно, выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых соединены с входом гироскопа инерциального и источником питания бортовой аппаратуры.
Существенным недостатком данной системы является то, что в начальный момент самонаведения, при выборе начального промаха, обусловленного ошибками подготовки и техническим рассеиванием, когда промах составляет максимальную величину, с головки самонаведения начинают поступать максимальные по величине команды управления, которые, поступая на рулевой привод, воздействуют на находящуюся в покое систему (ступенчатое воздействие). Планер же большинства управляемых снарядов имеет, как правило, коэффициент аэродинамического демпфирования на участке управления 0,05-0,1 и при отработке максимальных команд управления величина перерегулирования снаряда по углам атаки α и скольжения β в следствии реакции на сигнал управления может достигать 100%, а амплитуда колебаний снаряда по углам атаки и скольжения, в зависимости от сочетаний конструкторских допусков на элементы планера, может превысить предельно допустимую величину (определяемую полем зрения ГСН), что приводит к снижению точности наведения, а в некоторых случаях и к срыву процесса наведения в следствии потери цели ГСН.
Известен формирователь импульсов [2], содержащий реверсивный счетчик, суммирующий вход которого соединен с выходом первого элемента совпадения, первый вход которого соединен с первым входом второго элемента совпадения, выход которого соединен с вычитающим входом реверсивного счетчика импульсов, второй вход - с выходной шиной и с прямым выходом RS триггера, R- вход которого соединен с выходом формирователя импульсов, шину тактовых импульсов, входную шину, шину синхронизации, инвертор, элемент ИЛИ, выход которого соединен с входом формирователя импульсов, выход которого соединен с входом сброса реверсивного счетчика импульсов, выход обратного переноса которого соединен с первым входом элемента ИЛИ, второй вход которого соединен через инвертор с третьим входом второго элемента совпадения и непосредственно с входной шиной и с вторым входом первого элемента совпадения, первый вход которого соединен с шиной тактовых импульсов, третий вход - с инверсным выходом RS- триггера, S- вход которого соединен с шиной синхронизации.
Недостатком данного устройства является то, что при наличии привязки выходных импульсов к синхроимпульсу в нем отсутствует возможность изменения длительности выходных импульсов по отношению к входным. В тоже время часто в системах автоматического управления в начальный момент времени (начало участка управления) ошибка системы управления максимальна и на исполнительный орган системы управления поступает максимальная команда, приводящая к большому ступенчатому воздействию на систему управления, что может привести к срыву контура управления и к возбуждению системы. Поэтому в таких системах при больших ошибках управления в начальный момент времени на время переходного процесса необходимо подавать на исполнительный орган системы сигнал, изменяющийся по определенному закону, например по линейно нарастающему, начиная от минимально допустимого до величины, определяемой длительностью входного сигнала, а по окончании времени переходного процесса входной сигнал должен проходить на исполнительный орган без изменения. При этом во избежании фазовых сдвигов при формировании сигналов середина импульсов управления не должна изменять своего временного положения.
Задачей предлагаемой группы изобретений является повышение точности наведения управляемых снарядов. Это достигается тем, что в начальный момент самонаведения, определяемый временем переходного процесса, команды с ГСН на рулевой привод проходят не на прямую, а их длительность меняется на время переходного процесса по определенному закону, например по линейно нарастающему, начиная от минимально допустимого значения до величины, определяемой длительностью входного сигнала, а по окончании времени переходного процесса входной сигнал проходит на рулевой привод без изменения. При этом во избежании фазовых сдвигов при формировании сигналов середина импульсов управления не изменяет своего временного положения.
Поставленная задача решается тем, что в систему наведения управляемого снаряда, содержащую рулевой привод, гироскоп инерциальный и головку самонаведения, включающую функциональные элементы, в том числе элемент ИЛИ, с соответствующими связями, выход "Захват" которой соединен с первым входом первого элемента И и через инвертор с первым входом второго элемента И, вторые входы которых соединены соответственно с вторым и третьим выходами гироскопа инерциального, выход первого элемента И соединен с входом "Компенсация" головки самонаведения и с третьим входом первого элемента ИЛИ, второй вход которого соединен с первым выходом гироскопа инерциального, а его выход - с входом первого усилителя мощности, выход второго элемента И соединен со вторым входом второго элемента ИЛИ, выход второго элемента ИЛИ соединен с входом второго усилителя мощности, выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых соединены с четвертым входом гироскопа инерциального и источником питания бортовой аппаратуры, введены третий элемент И и формирователь импульсов, первый, второй, третий и четвертый входы которого соединены соответственно с выходами "Y", "+Y", "+Z" и "-Z" головки самонаведения, пятый вход соединен с выходом третьего элемента И, первый и второй его выходы соединены с первыми входами первого и второго элементов ИЛИ соответственно, а третий и четвертый его выходы соединены соответственно с входами третьего и четвертого усилителей мощности, при этом первый вход третьего элемента И соединен с выходом элемента ИЛИ головки самонаведения, а второй его вход - с выходом "Захват" головки самонаведения;
а в формирователь импульсов, содержащий входную шину, первый элемент И, первый вход которого соединен со входной шиной, второй элемент И, генератор тактовых импульсов, первый счетчик импульсов, шину синхронизации и выходную шину, введены второй счетчик импульсов, постоянное запоминающее устройство (ПЗУ) и элементы И, общее количество которых соответствует количеству выходных формируемых сигналов, причем шина синхронизации соединена с входом установки в исходное положение первого счетчика импульсов и счетным входом второго счетчика импульсов, информационные выходы которого соединены с первой группой адресов ПЗУ, вторая группа адресов которого соединена с информационными выходами первого счетчика импульсов, счетный вход которого соединен с выходом генератора тактовых импульсов, второй выход ПЗУ соединен с входом разрешения работы второго счетчика импульсов, а первый выход - с вторыми входами всех элементов И, первые входы которых соединены с входной шиной, а выходы соединены с выходной шиной.
На фиг.1 приведена блок-схема предлагаемой системы, а на фиг.2 и фиг.3 - диаграммы, поясняющие работу системы; фиг.4 - пример выполнения формирователя импульсов, где:
1 - головка самонаведения, содержащая фотоприемное устройство 19, усилители релейной и линейной следящих систем 20 и 22, пороговые устройства релейной и линейной следящих систем 21 и 28, схему ИЛИ 23, схемы суммарно-разностной обработки 24 и 27, пиковые детекторы 25, сумматор 26, селектор 29, формирователь выходных сигналов 30, схему нормирования 31, логическую схему 32, усилитель мощности 33, схему ШИМ 35, усилительно-преобразовательные элементы 34, обмотки катушек коррекции 36 и 37, обмотку компенсации веса 38 с соответствующими связями, выполненную, например, как в прототипе, 2 - гироскоп инерциальный с ламельным датчиком, выполненный, например, как в прототипе, 3 - рулевой привод, 5 - формирователь импульсов, выполненный, например, как приведено ниже на фиг.4, 6 элемент НЕ, 7, 8, 4 - первый, второй и третий элементы И, 9, 10 - первый и второй элементы ИЛИ, 11, 12, 13, 14 - первый, второй, третий и четвертый усилители мощности, 15, 16, 17, 18 - обмотки управления автопилота.
Причем выход "Захват" ГСН 1 соединен с первым входом первого элемента И 7 и через инвертор 6 с первым входом второго элемента И 8, вторые входы которых соединены соответственно с вторым и третьим выходами гироскопа инерциального 2, выход первого элемента И 7 соединен с входом "Компенсация" ГСН 1 и с третьим входом первого элемента ИЛИ 9, второй вход которого соединен с первым выходом гироскопа инерциального 2, а его выход - с входом первого усилителя мощности 11, выход второго элемента И 8 соединен с вторым входом второго элемента ИЛИ 10, выход второго элемента ИЛИ 10 соединен с входом второго усилителя мощности 12, выходы первого 11, второго 12, третьего 13 и четвертого 14 усилителей мощности соединены с первыми входами первой 15, второй 16, третьей 17 и четвертой 18 обмоток управления рулевого привода, вторые входы которых соединены с входом гироскопа инерциального 2 и источником питания бортовой аппаратуры, при этом первый, второй, третий и четвертый входы формирователя импульсов 5 соединены соответственно с выходами "-Y", "+Y", +Z" и "-Z" ГСН 1, пятый вход формирователя импульсов 5 соединен с выходом третьего элемента И 4, первый и второй его выходы соединены с первыми входами первого 9 и второго 10 элементов ИЛИ соответственно, а третий и четвертый его выходы соединены соответственно с входами третьего 12 и четвертого 13 усилителей мощности, первый вход третьего элемента И соединен с выходом элемента ИЛИ головки самонаведения, а второй вход соединен с выходом "Захват" головки самонаведения.
Работает система наведения следующим образом.
Производится выстрел и снаряд летит по баллистической траектории. В расчетной точке траектории разарретируется и раскручивается ротор гироскопа инерциального 2, выходят на режим батареи питания бортовой аппаратуры и ГСН 1, отделяется блок носовой, открывается входной зрачок ГСН.
При подлете снаряда к цели и при приеме отраженных от цели импульсов лазерного излучения ГСН формирует сигнал "Захват", который, поступая на первый вход первого элемента И 7, разрешает проход импульсов с первого и второго выхода ГИ 2 на вход "Компенсация" ГСН 1 и в рулевой привод 3.
При вращении снаряда на первом и втором выходах гироскопа 2 вырабатываются импульсы, суммарная длительность которых приблизительно равна половине периода вращения снаряда.
Под действием этого сигнала ось ГСН будет стремиться разворачиваться в вертикальной плоскости вниз, а в ГСН при этом будет вырабатываться сигнал, компенсирующий влияние прецессии, обусловленной сигналом с инерциального гироскопа, при этом сигнал на выходе ГСН в процессе ее слежения за целью будет иметь следующий вид:
где f - функция, определяемая пеленгационной характеристикой ГСН, е - угловая скорость линии "снаряд-цель",  - угловая скорость прецессии головки под действием сигнала "Компенсация" с гироскопа инерциального.
- угловая скорость прецессии головки под действием сигнала "Компенсация" с гироскопа инерциального.
Указанный сигнал является исходным для формирования импульсов управления рулевым приводом автопилота (сигналов, вырабатываемых ГСН по выходам +Y, -Y, +Z, -Z). При этом в начальный момент наведения, когда начальный промах максимален, по выходам +Y, -Y, +Z, -Z ГСН 1 вырабатываются максимальные по величине команды (фиг.2б), середина которых жестко привязана к импульсам подсветки цели, т.е. к сигналу Uс.вх (фиг.2а), вырабатываемому релейными или линейными площадками ФПУ и поступающими с выхода элемента ИЛИ 23 ГСН. Эти импульсы поступают на первый вход третьего элемента И 4 и при наличии сигнала с выхода "Захват" головки самонаведения 1 на его втором входе эти импульсы проходят на пятый вход формирователя импульсов 5. Начиная с первого сигнала Uс. вх, поступающего после сигнала "Захват", формирователь импульсов 5 начинает формировать временные "ворота" переменной длительности в течение всего времени переходного процесса по каждому входному сигналу, принятому ГСН (фиг. 2б). Причем длительность временных "ворот", сформированных по первому входному импульсу, соответствует минимальной длительности сигналов управления, формируемых ГСН по выходам +Y, -Y, +Z, -Z, а последующие могут увеличиваться по любому закону, например по линейно нарастающему, при котором длительность временных "ворот" с каждым входным импульсом увеличивается, например, на одну и ту же постоянную величину при линейно нарастающем законе до величины, соответствующей длительности максимальной команды, причем середина временных "ворот" строго соответствует середине команд управления, формируемых ГСН. При этом если промах был максимальным, то входные команды (фиг.2б) ограничиваются по длительности и их длительность, определяемая длительностью временных "ворот" (фиг.2в), нарастает постепенно до максимальной величины, а если величина промаха была незначительной (фиг.2г), то и длительности части команд управления, определяемые выражением (1) будут меньше длительностей временных "ворот" на конечном участке переходного процесса, эти команды управления пройдут через временные "ворота" без ограничения (фиг.2д). По окончании переходного процесса входные команды проходят через формирователь импульсов без изменения.
Команды управления +Y и -Y, прошедшие через формирователь импульсов 5, с его первого и второго выходов поступают на первые входы первой 9 и второй 10 схем ИЛИ, где они суммируются с сигналами компенсации веса, поступающими на их вторые и третьи входы с гироскопа инерциального 2. С выходов первой 9 и второй 10 схем ИЛИ сигналы управления поступают через первый 11 и второй 12 усилители мощности на первую 15 и вторую 16 обмотки управления рулевым приводом 3. Команды управления +Z и -Z с 3 и 4 выходов формирователя импульсов 5, пройдя через третий 13 и четвертый 14 усилители мощности, поступают соответственно на третью 17 и четвертую 18 обмотки управления рулевым приводом 3.
Под действием этих сигналов происходит отклонение рулей, в следствие чего происходит уменьшение рассогласования между осью снаряда и оптической осью ГСН. Т. о. происходит наведение снаряда на цель, причем на переходном участке обеспечивается не ступенчатое воздействие на планер, а плавное.
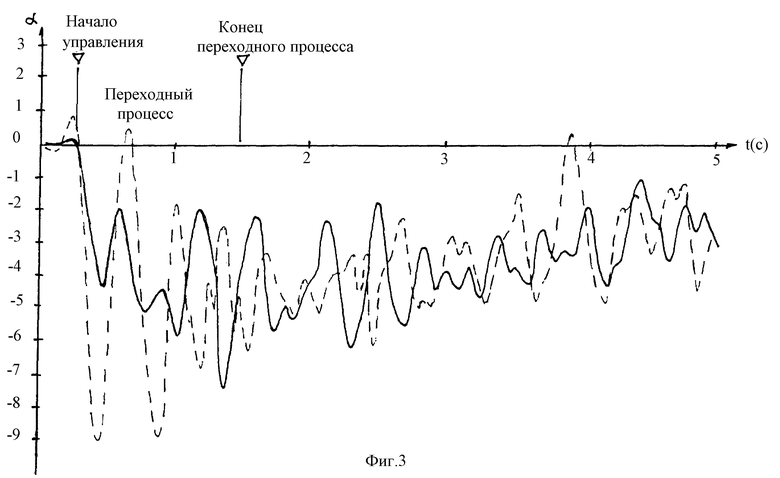
Т. о. , за счет того, что в начале участка самонаведения поступление команд на рулевой привод обеспечивается по линейно нарастающему закону, значительно (1,5 раза) уменьшается амплитуда колебаний продольной оси снаряда (фиг. 3) относительно его центра масс на переходном участке наведения и тем самым повышается точность наведения, что исключает нарушение процесса наведения, возникающее при углах колебаний продольной оси снаряда, превышающих предельно допустимое значение.
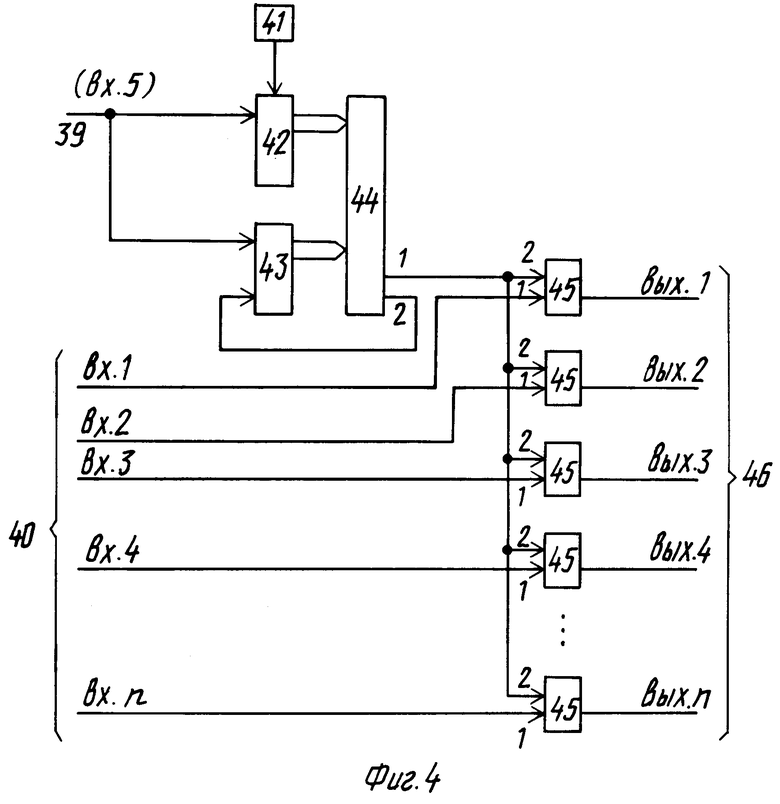
На фиг. 4 приведена структурная схема формирователя импульсов, где 39 - шина синхронизации (вход 5), 40 - входная шина (входы 1,2,3,4,...,N), 41 - генератор тактовых импульсов, 42 - первый счетчик импульсов, 43 - второй счетчик импульсов, 44 - постоянное запоминающее устройство, 45 - схемы И, 46 - выходная шина (выходы 1,2,3,4,...,N).
При этом входная шина 40 соединена с первыми входами всех элементов И 45, шина синхронизации 39 соединена со входом установки в исходное положение первого счетчика импульсов 42 и счетным входом второго счетчика импульсов 43, информационные выходы которого соединены с первой группой адресов ПЗУ 44, вторая группа адресов которого соединена с информационными выходами первого счетчика импульсов 42, счетный вход которого соединен с выходом генератора тактовых импульсов 41, второй выход ПЗУ 44 соединен со входом разрешения работы второго счетчика импульсов 43, а первый выход - с вторыми входами элементов И 45, выходы которых соединены с выходной шиной 46.
Все устройства, входящие в данную схему, могут быть выполнены на микросхемах, например 561 серии, а запоминающее устройство - на 1623РТ1, либо реализованы на микро-ЭВМ, например, типа 1830ВЕ48.
Перед постановкой в схему происходит программирование ПЗУ.
Например, пусть период следования входных импульсов равен 50 мс. При этом длительность входных сигналов может изменяться от 0 до 50 мс, синхроимпульс привязан к началу формирования команд управления, а сама команда (входной сигнал), ее середина, формируется относительно центра между двумя соседними синхроимпульсами. При этом необходимо обеспечить, например, линейное нарастание импульсов на выходе устройства от 10 до 50 мс в течение времени, определяемого, например, девятью импульсами входного сигнала, при этом точность формирования выходных сигналов не должна быть хуже 1 мс.
Исходя из заданной точности, определяем период импульсов тактового генератора, она должна быть не более 1 мс.
Производится программирование ПЗУ, исходя из следующих соображений. Старшая часть адресов ПЗУ определяет номер входного импульса, т.к. счетчик 42 считает входные синхроимпульсы, а младшая - сигнал для формирования выходного сигнала, т.к. на счетчике 43 присутствует мгновенное значение времени между синхроимпульсами. Так для нашего примера для первого импульса в ячейки памяти от 0 до 20 записывается логический ноль, в следующие 10 ячеек памяти - логическая единица и далее с 30 по 50 ячейки памяти - логический ноль. Далее для второго импульса (старшая часть ПЗУ) в ячейки памяти с 0 по 18 записывается логический ноль, с 19 по 32 - логическая единица и с 33 до 50 - логический ноль.
Работает устройство следующим образом.
При подаче питания происходит принудительное обнуление счетчика 43 и на первом выходе ПЗУ присутствует логический ноль.
При поступлении синхроимпульса по шине синхронизации 39 счетчик 43 увеличивает свое состояние на единицу, а счетчик 42 обнуляется. В течении первых 20 мс после этого (двадцати тактов тактового генератора) на первом выходе ПЗУ присутствует сигнал логического нуля, и если в это время на входной шине присутствуют сигналы, то они не проходят на выходную шину через элементы И 45. В течение последующих 10 мс (десять периодов тактового генератора) на первом выходе ПЗУ присутствует сигнал логической единицы, и если на входной шине есть сигналы, то они проходят на выход устройства. А в течение последующего времени на первом выходе ПЗУ - сигнал логического нуля, который запрещает проход входных сигналов (если они есть) на выходную шину устройства.
При поступлении следующего синхроимпульса процесс повторяется, но уже для второго импульса (счетчик 43 увеличил свое состояние на единицу) и входные сигналы могут пройти на выход устройства только в интервал времени с 18 по 32 мс после поступления синхроимпульса. И т.д. При поступлении девятого синхроимпульса на втором выходе ПЗУ появляется сигнал логической единицы, запрещающий дальнейшую работу счетчика 43, а на первом выходе ПЗУ сигнал логической единицы будет присутствовать всегда, независимо от состояния ее младших адресов, и т.о. после девятого импульса входные сигналы будут проходить на выходную шину устройства без изменения.
Т. о. , введение в формирователь импульсов второго счетчика импульсов и ПЗУ позволяет формировать выходные сигналы из входных по закону, определяемому пользователем.
Источники информации
1. "152-мм выстрел 3ВОФ64(3ВОФ93) с осколочно-фугасным управляемым снарядом 3ОФ39 и зарядом 1 (уменьшенным переменным зарядом). Техническое описание и инструкция по эксплуатации 3ВОФ64.00.00.000ТО (3ВОФ93.00.00.000ТО)". М. , Военное издательство. 1990 г., с. 39-64.
2. А.С. 1626348 от 07.02.1991 г., Н 03 К 5/04.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205358C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2205361C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2184925C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2187781C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2001 |
|
RU2210727C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205359C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2217692C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2224972C2 |
| СПОСОБ ВЗВЕДЕНИЯ БОРТОВЫХ СИСТЕМ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2191984C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
Изобретение относится к области вооружения, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения. Техническим результатом изобретения является повышение точности наведения и достигается тем, что система наведения управляемого снаряда содержит рулевой привод, гироскоп инерциальный и головку самонаведения, включающую функциональные элементы, в том числе элемент ИЛИ, с соответствующими связями, выход "Захват" которой соединен с первым входом первого элемента И и через инвертор - с первым входом второго элемента И, вторые входы которых соединены соответственно с вторым и третьим выходами гироскопа инерциального. Выход первого элемента И соединен с входом "Компенсация" головки самонаведения и с третьим входом первого элемента ИЛИ, второй вход которого соединен с первым выходом гироскопа инерциального, а его выход - с входом первого усилителя мощности, выход второго элемента И соединен с вторым входом второго элемента ИЛИ. Выход второго элемента ИЛИ соединен с входом второго усилителя мощности, выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых соединены с четвертым входом гироскопа инерциального и источником питания бортовой аппаратуры. Введены третий элемент И и формирователь импульсов, первый, второй, третий и четвертый входы которого соединены соответственно с выходами "-Y", "+Y", "+Z" и "-Z" головки самонаведения, пятый вход соединен с выходом третьего элемента И, первый и второй его выходы соединены с первыми входами первого и второго элементов ИЛИ соответственно, а третий и четвертый его выходы соединены соответственно с входами третьего и четвертого усилителей мощности, при этом первый вход третьего элемента И соединен с выходом элемента ИЛИ головки самонаведения, а второй его вход - с выходом "Захват" головки самонаведения. Формирователь импульсов содержит входную шину, первый элемент И, первый вход которого соединен с входной шиной, второй элемент И, генератор тактовых импульсов, первый счетчик импульсов, шину синхронизации и выходную шину. Введены второй счетчик импульсов, постоянное запоминающее устройство (ПЗУ) и элементы И, общее количество которых соответствует количеству выходных формируемых сигналов. Причем шина синхронизации соединена с входом установки в исходное положение первого счетчика импульсов и счетным входом второго счетчика импульсов, информационные выходы которого соединены с первой группой адресов ПЗУ, вторая группа адресов которого соединена с информационными выходами первого счетчика импульсов, счетный вход которого соединен с выходом генератора тактовых импульсов. Второй выход ПЗУ соединен с входом разрешения работы второго счетчика импульсов, а первый выход - с вторыми входами всех элементов И, первые входы которых соединены с входной шиной, а выходы соединены с выходной шиной. 2 с.п. ф-лы, 4 ил.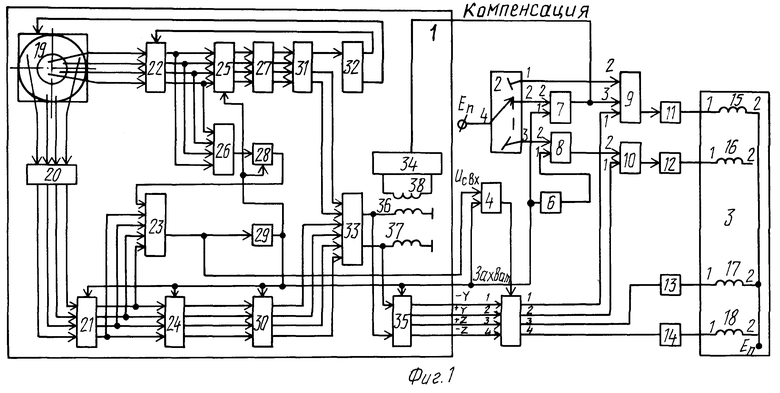
| Способ образования азокрасителей на волокнах | 1918 |
|
SU152A1 |
| - М.: Военное издательство, 1990, с | |||
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
| Формирователь импульсов | 1989 |
|
SU1626348A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2138767C1 |
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |
| Экономайзер | 0 |
|
SU94A1 |
| РАСШИРИТЕЛЬ ПРЯМОУГОЛЬНЫХ ИМПУЛЬСОВ | 1993 |
|
RU2067788C1 |
| СПОСОБ ПРОКЛАДКИ ТРУБОПРОВОДА ПОД ВОДНЫМ ПРЕПЯТСТВИЕМ | 2007 |
|
RU2342585C2 |
| GB 1222160, 10.02.1971. | |||
