1
Изобретение относится к машиностр кию,в частности к приводам, микромани- пупяторов.
Известны приводы микроманипупяторов, содержащие устройство прямопиней- ного перемещения и поворота, связанное с корпусом 13.
Однако такие приводы не обладают высокой точностью при небольшой величине возможных перемещений и сложны по конструкции.
Цель изобретения - повышение точности, расширение диапазона зависимых перемещений и упрощение конструкции привода.
Это достигается тем, что предлагаемый привод выполнен в виде пьезоэлектрического преобразователя, состояшего, например, из трех взаимно параллельных стержней,два из которых жестко закрепле ны на корпусе, а третий подпружинен к к сферическому элементу, расположенному между этими стержнями.
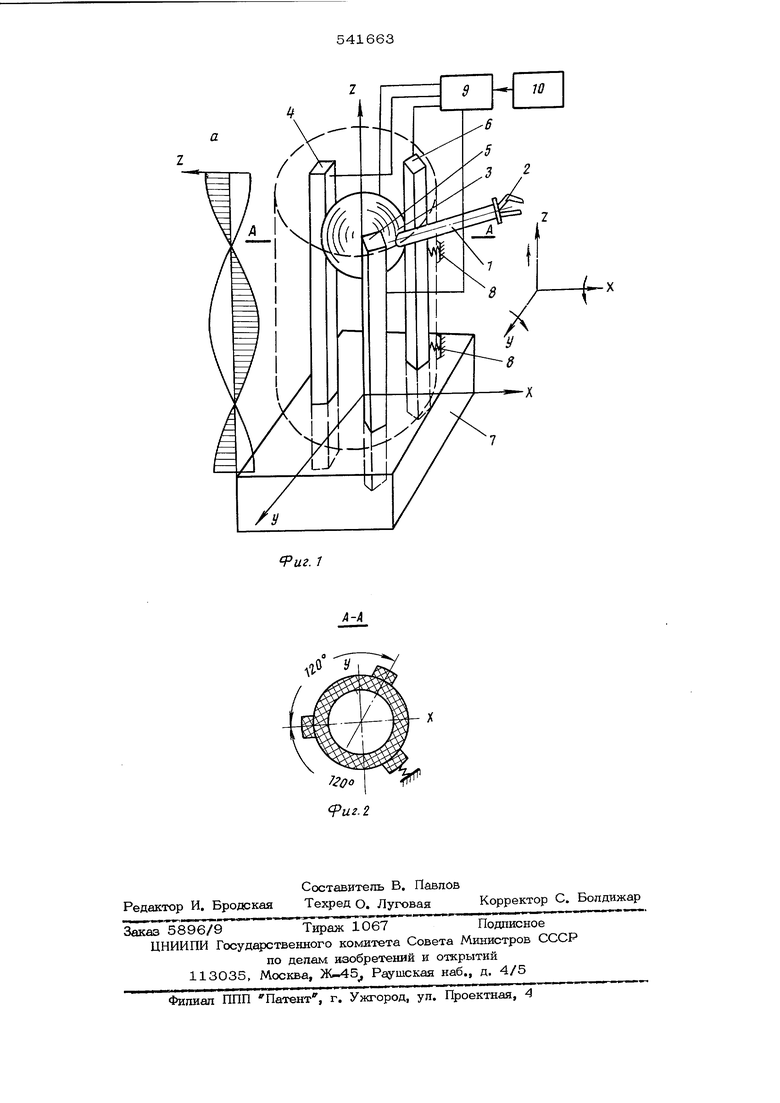
На фиг. 1 изображена принципиальная схема предлагаемого привода микроманипулятора; на фиг. 2 - разрез по А-А на фиг. 1.
Привод микроманипулятора сообщает три степени подвижности механической рухе 1, несущей захват 2, присоединенной к сферическому элементу 3, выполненному из пьезокерамического материала.
Сферический элемент 3 охвачен тремя стержнями 4, 5, 6, расположенными взаимно параллельно и выполне1шыми из пьезокерамического материала. Стержни 4 и 5 жестко закреплены на корпусе 7 в узле колебаний. Стержень 6 подпружинен к сферическому элементу 3 пружиной 8 и фиксирован на корпусе 7 в узле колебания. Стержни 4-6 и сферический элемент 3 снабжены электродами и соединены с коммутирующим, устройством 9, к входу которого подсоединен генератор 10 электрических колебаний. Длина стерх;ней 4, 5, и 6 подобрана таким, образом, что при возбуждении резонансных колебаний в длине стержня укладывается одна полная длина волны, а частота продоль
ных колебаний стержней равна частоте радиальных колебавши сферического элемета 3.
Привод ргботает следуюшик образом.
При подсоединения генератора электрИ ческих колебаний 10 к сферическому элементу 3 ;: стержням 4, 5, 6 они начинаю колебаться на рбэоналской частоае. Пье- зокерамические стержни 4, 5, 6 совершают продольные колебания, а сферический элемент 3 - радиальные. Вследствие симметричности системы (см фиг. 2) пружина е обеспечивает одинаковый натяг сфер ;ч:еского элемента 3 с каждым. иа стерхкней 4-6. Форма колебаний стержней приведена на графике (см. фиг. 1). В местах контакта стержней 4-6 со сферичесииы. элементом 3 происходят косые соударения болыиой частоты (один удар за период колебаний стержней). Косые соударения в кaJкдoм вз трех контактов iiuncasfieHbi в сторону, определяемую соотношением фаз колебаний сферы 3 и стержней 4, 5, 6, т.е. оно может быть направлено как вверх, так и вниз. При равенстве фаз колебаний всех стержней 4, 5, 6, сферичесхшй элемент 3 будет перемещаться либо вверх, либо вниз (в завнсим.ости от взаимной фазы ее колебаний относительно стержней. Движение сферического элемента 3 с захватом 2 вниз и вверх (реверсирование) происходт1т при перемене фазы колебаний стержней 4, 5, 6 на 180
Вращение по осям X и Y достигается за счет соответствующего изменения фаз колебаний стержней 4, 5, 6. Так вращение по оси Y задается таким образом, что косые соударения в паре сферический элемент 3 - стержень 4 направлены в строну, противоположную направлению косых соударений в паре сферический элемент 3 стержни 5, 6.
Поворот по оси Х происходит следуюошм. образом Направление косых соударений в паре сферический элемент 3 - стержень 5 противоположно паре сферический элемент 3 - стержень 6, при этом стержень 4 колебаний не совершает. Коммутирующее устройство 9 служит для соответствующего изменения фазы колебаний всех стержней, т.е. для задания движения по одной из трех осей.
Частоты, применяемые для такого вида привода, лежат в пределах от 20 кГц до 200 кГц, а амплитуды колебаний весьма малы (от долей микрометра до нескольких микрометров),-поэтому вешгчина перемещения по любой из координат во времени одного цикла колебаний также мала и составляет величину порядка микрометров. Управляя амплитудой колебаний, можно достичь еще меньших перемещений. Чувствительность привода составила 0,01 мкм.
Формула изобретения
Привод, например, микроманипулятора, содержащий устройство прямолинейного перемещения и поворота, связанное с корпусом, отличающийся тем что, с целью повышения точности, расширения диапазона задаваемых перемещений и упрощения конструкции, он выполнен в виде пьезоэлектрического преобразователя, состоящего, по меньшей мере, из трех взаимно параллельных стержней, два из которых жестко закреплены на корпусе, а третий подпружинен к сферическому элементу, расположенному между этими стержнями.
Источники информации, принятые во внимание при экспертизе:
1. Авт.свид. СССР № 40О459, М.Ю1. В 25 J 7/00, 1971 г.
Риг. /
Х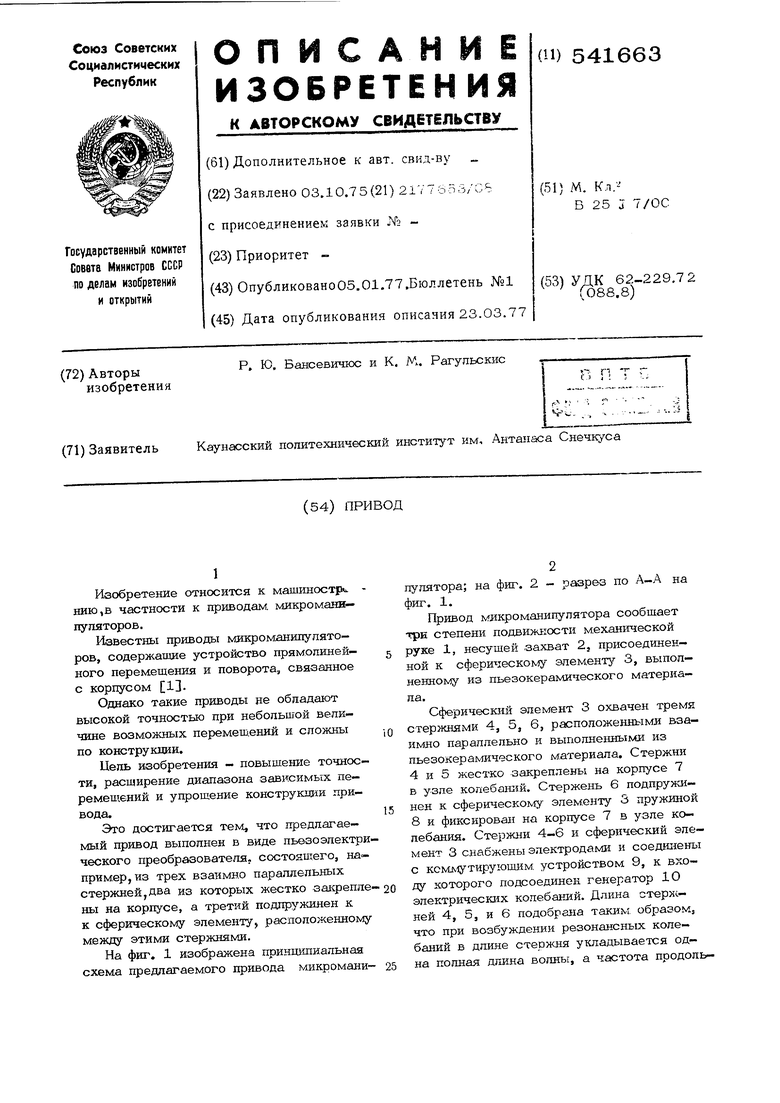
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКООРДИНАТНЫЙ ПЬЕЗОДВИГАТЕЛЬ | 1999 |
|
RU2166832C1 |
| Двухкоординатное сканирующее устройство | 1978 |
|
SU742853A1 |
| Контактное устройство | 1980 |
|
SU938340A1 |
| Микроманипулятор | 1980 |
|
SU960004A1 |
| Устройство для юстировки дискового растра | 1985 |
|
SU1273863A1 |
| ТЕРМОЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ МИКРОМАНИПУЛЯТОРА (ВАРИАНТЫ) | 2004 |
|
RU2259914C1 |
| РОТАЦИОННЫЙ ПРИВОД МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2266811C1 |
| ВИБРАЦИОННЫЙ ДАТЧИК | 2006 |
|
RU2331076C1 |
| Сканирующее устройство | 1983 |
|
SU1121642A1 |
| ГИДРОАКУСТИЧЕСКИЙ ВЕКТОРНЫЙ ПРИЕМНИК МГУ | 1988 |
|
RU2090012C1 |