Изобретение относится к области гидроакустики и может быть использовано для обнаружения и сопровождения подводной цели в морских акваториях.
Известен способ обнаружения подводной цели в морской акватории, заключающийся в инициировании в зоне предполагаемого расположения цели ударной звуковой волны с помощью специального взрывного заряда, сбрасываемого с летательного аппарата, и приеме отраженной от цели звуковой волны гидроакустическим приемником, установленным на радиогидроакустическом буе (1).
Недостатком известного аналога (1) является низкая точность в определении координат цели и трудности сопровождения последней при ее движении в подводной акватории.
Известен способ обнаружения и локации подводной цели в охраняемой морской акватории, принятый за прототип (5).
Способ заключается в инициировании в зоне предполагаемого расположения цели ударной звуковой волны и приеме инициированной в воде звуковой волны, а также звуковой волны, отраженной от цели, гидроакустическим приемником с остронаправленной характеристикой направленности, при последующей обработке выходных сигналов с гидроакустического приемника, в результате которой по известной скорости распространения звука определяют пространственные координаты, кинематические и геометрические параметры подводной цели (2).
В качестве инициатора ударной звуковой волны в прототипе используют пороховой снаряд, в качестве гидроакустического приемника с остронаправленной характеристикой направленности - плоскую двумерную матрицу - решетку из восьми приемных элементов, в которой множество приемных элементов располагается по нескольким радиальным линиям, расположенным в одной плоскости.
Недостатком прототипа являются трудности, возникающие при сопровождении цели, из-за неподвижности места инициирования ударной звуковой воды и невозможности скрытного обнаружения цели, а также нарушение экологии водной среды продуктами взрыва.
Техническим результатом, получаемым от внедрения изобретения является устранение недостатков прототипа, т.е. обеспечение скрытного оперативного сопровождения цели при экологической чистоте.
Данный технический результат достигают за счет того, что в известном способе обнаружения и локации подводной цели в охраняемой морской акватории путем инициирования в зоне предполагаемого расположения цели ударной звуковой волны и приема инициированной в воде звуковой волны, а также волны, отраженной от цели, гидроакустическим приемником с остронаправленной характеристикой направленности, при последующей обработке выходных сигналов с гидроакустического приемника, в результате которой определяют пространственные координаты, кинематические и геометрические параметры подводной цели, инициирование в воде ударной звуковой волны проводят с помощью импульсного лазерного излучения, сфокусированного в зоне предполагаемого расположения цели в диапазоне длин волн (0,6 - 1,1) мкм.
При этом фокусировку лазерного излучения в зоне предполагаемого расположения цели проводят с помощью нескольких пересекающихся в одной области лазерных лучей лазеров, расположенных на одном или нескольких надводных плавсредствах. Плавсредства могут быть надводные и подводные.
При этом инициирование в воде ударной звуковой волны с помощью импульсного лазерного излучения проводят через определенный интервал времени, а пиковую мощность в каждом импульсе сфокусированного лазерного излучения задают не превышающей 109 Вт/см2.
Область фокусировки лазерного излучения в водной среде перемещают в зоне предполагаемого расположения цели как по горизонтали, так и по вертикали.
При этом импульсное лазерное излучение генерируют с помощью рубинового или неодимового лазеров, работающих в режиме свободной генерации импульсов или в режиме модуляции добротности резонаторов лазеров.
Пиковую мощность в импульсе сфокусированного лазерного излучения можно задавать также более 109 Вт/см2.
Частоту следования лазерных, а значит, и звуковых импульсов задают учетом дальности до цели.
На выходе гидроакустического приемника с остронаправленной характеристикой направленности используют индикатор кругового обзора.
Существо способа обнаружения и локации подводной цели в охраняемой морской акватории заключается в возможности инициирования в морской воде с помощью сфокусированного лазерного излучения ударной звуковой волны. В зависимости от формы места перетяжки сфокусированного лазерного излучения с помощью последнего в воде можно создавать плоские, цилиндрические и сферические ударные гидроакустические волны.
Так с помощью цилиндрических линз получают плоские ударные волны, с помощью сферических линз - цилиндрические ударные волны, а при "точечной" фокусировке лазерного излучения получают сферические ударные волны.
В последнем случае фокусировку лазерных лучей проводят с помощью нескольких пересекающихся в одной области лазерных лучей.
Многочисленные эксперименты авторов изобретения (3, 4) показали, что наиболее оптимальным волновым диапазоном для реализации способа является диапазон (0,6 - 1,1 мкм), а наиболее подходящими лазерами для решения поставленной задачи являются импульсные рубиновые и неодимовые лазеры, работающие или в режиме свободной генерации импульсов или в режиме модуляции добротности резонаторов лазеров. В первом случае генерируются импульсы длительностью (10-3 - 10-6) с, во втором (10-7 - 10-8) с.
При этом в первом случае при пиковой мощности в импульсе меньше 109 Вт/см2 в воде могут возникать тепловые неоднородности порядка несколько градусов по температуре, живущие несколько секунд и не участвующие в динамике описываемых процессов.
В месте фокусировки лазерного излучения и нагрева водной среды инициируется также ударная звуковая волна за время, равное длительности лазерного импульса.
Если пиковая мощность в лазерном импульсе превышает пороговую величину (порядка 109 - 1010 Вт/см2), то в водной среде в области фокусировки лазерного излучения получают не только тепловые неоднородности, но диэлектрический пробой, сопровождающийся генерацией ударных звуковых волн с уровнем давления в несколько атмосфер.
Превышение порога пиковой мощности 1010 Вт/см2 в импульсе достигают на практике с помощью лазерного излучения, получаемого с помощью лазеров, работающих в режиме модуляции добротности их резонатора. А с помощью лазеров, работающих в режиме свободной генерации длительность лазерного импульса (10-3 - 10-6) с, уровень давления в генерируемых ударных волнах можно регулировать изменением уровня лазерной энергии в импульсе.
Это позволит использовать в способе работу лазера в режиме генерации последовательности импульсов с управляемой частотой следования и длительности.
Причем для большей скрытности системы обнаружения импульса можно задавать на уровне (или ниже уровня) естественных морских шумов, присутствующих в акватории на момент поиска и локации цели. Признаком, позволяющим выделить зондирующие импульсы на фоне морских шумов, является частота следования последовательности звуковых импульсов, на которую настраивается аппаратура, обрабатывающая принятые гидроакустическим приемником сигналы.
В качестве индикатора гидроакустического приемника удобно использовать индикатор кругового обзора, работа которого синхронизирована с частотой следования лазерных импульсов.
Изобретение поясняется чертежом.
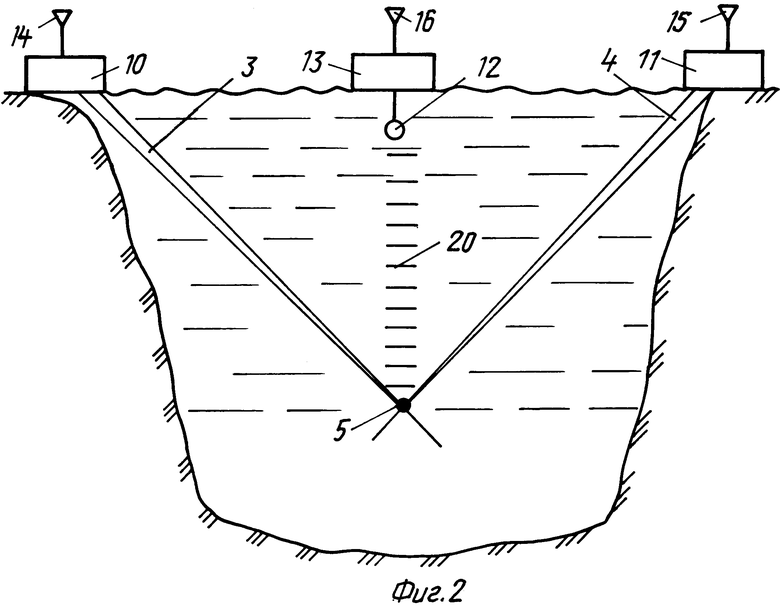
На фиг. 1 представлена схема реализации способа, вариант, когда лазеры расположены на одном надводном плавсредстве, а гидроакустический приемник - на другом надводном плавсредстве; на фиг. 2 представлена схема реализации способа для случая, когда фокусировка лазерных лучей в зоне предполагаемого расположения цели проводится с помощью пересекающихся лучей лазеров, расположенных на берегу, а гидроакустический приемник расположен в море на буе.
Схема для реализации способа включает в себя надводное плавсредство 1 (фиг. 1) с радиоантенной 2, лазерные устройства с фокусирующей и сканирующей оптикой (на чертеже не показаны), расположенные на кормовой и носовой частях надводного плавсредства.
Лазерные устройства позволяют с помощью сфокусированных лазерных лучей 3 и 4 получить в местах 5 из перетяжки и пересечения наибольшую интенсивность лазерного излучения.
Лазерные устройства снабжены также оптической аппаратурой для смещения лазерных лучей и изменения временного и энергетического режима работы лазеров (на чертеже не показаны).
Схема также включает в себя дополнительное надводное плавсредство 6 с радиоантенной 7, снабженное гидроакустическим приемником 8 с индикатором кругового обзора на выходе.
Второй вариант реализации способа (фиг. 2) отличается от первого тем, что описанные выше лазерные установки 10, 11 расположены на берегу охраняемой морской акватории на некотором расстоянии друг от друга, а гидроакустический приемник 12 - на буе 13.
Синхронизация работы лазерных установок 10, 11 с работой приемной аппаратуры, расположенной в буе 13, осуществляется по радиоканалу с помощью радиоантенны 14, 15, 16 или же с помощью кабелей (на чертеже не показаны).
Способ обнаружения и локации подводной цели 17 в охраняемой морской акватории 18 реализуется следующим образом (фиг. 1).
Надводное плавсредство 1, патрулирующее охраняемую морскую акваторию 19 (вместе с плавсредством 6), облучает с помощью лазеров место 5 морской акватории 18.
В данном месте возникает ударная звуковая волна, распространяющаяся в воде со скоростью звука. Звуковые волны 19 достигают подводной цели 17, отражаясь от последней, достигают гидроакустического приемника 8, надводного судна 6, принимающего также и прямые звуковые волны 20 от места 5 инициирования звуковой волны. По результатам обработки принятых гидроакустических сигналов определяют пространственные координаты, геометрические размеры, направление и скорость движения цели 17.
Для обеспечения скрытности системы обнаружения и локации цели 17 лазеры на надводном плавсредстве 1 работают в режиме свободной генерации последовательности импульсов без превышения пороговой величины пиковой мощности в импульсе порядка 109 Вт/см2.
В этом случае в месте 5 морской акватории 18 инициируется последовательность ударных звуковых волн, следующих через определенный промежуток времени. Процесс инициирования и приема звуковых волн 19, 20 синхронизируются через радиоантенны 2, 7. Это позволяет выделить полезный сигнал на фоне морских шумов и помех даже для случая их равенства по уровням.
Причем для обеспечения идентичности инициируемых звуковых волн зону 5 сканируют (периодически смещают на новое место) от импульса к импульсу.
Маскировка уровня зондирующего ударного сигнала под морские шумы позволит обеспечить скрытность системы обнаружения и локацию цели. С другой стороны, в отличие от прототипа место 5 инициирования ударной звуковой волны с надводного плавсредства 1 можно оперативно перемещать в любую необходимую область охраняемой акватории 19. Это позволяет повысить оперативность обнаружения и сопровождения цели по сравнению с известными способами-аналогами.
Схема реализации способа, представленная на фиг. 2, работает аналогично описанному выше.
Источники информации
1. Р.Дж. Урик. Основы гидроакустики, Л.: "Судостроение", 1978, стр. 26, 27.
2. Патент Японии N 2761487B28086866A, кл. 6 G 01 S 15/06, 1998. Краткий перевод НСМ, 1999, вып. 85, N 14, с. 27 - прототип.
3. Ю.Н. Власов. "Разработка оптико-визуального метода и образцовых средств измерений характеристик турболентности" Кандидатская диссертация, М., ВНИИФТРИ, 1975, стр. 39.
4. Ю. Н. Власов "Оптические метки в гидродинамических исследованиях и обеспечении единства измерений скорости и турбулентности истоков жидкости".- Метрология, 1974, N 11, стр. 29-36.
5. US 5646907 A, 08.07.1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОЙ ЦЕЛИ В ОХРАНЯЕМОЙ АКВАТОРИИ | 1999 |
|
RU2154841C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВОДНОЙ ЦЕЛИ | 1999 |
|
RU2154842C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВОДНОЙ ЦЕЛИ В ОХРАНЯЕМОЙ АКВАТОРИИ | 1999 |
|
RU2157551C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА В КОНТРОЛИРУЕМУЮ ОБЛАСТЬ НАТУРНОГО ВОДОЕМА | 1999 |
|
RU2150123C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОГО ПЛАВСРЕДСТВА СО СТАЦИОНАРНЫМ РАЗМАГНИЧИВАЮЩИМ УСТРОЙСТВОМ В ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2168737C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНОГО ОБЪЕКТА НА ОХРАНЯЕМОЙ МОРСКОЙ АКВАТОРИИ | 2000 |
|
RU2177626C2 |
| ТЕРМООПТИЧЕСКИЙ СПОСОБ ОБСЛЕДОВАНИЯ ПОДВОДНОГО ОБЪЕКТА | 2001 |
|
RU2192023C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НАД МОРСКОЙ АКВАТОРИЕЙ С ПОДВОДНОГО ПЛАВСРЕДСТВА | 2001 |
|
RU2210087C1 |
| СПОСОБ ЗАЩИТЫ ПОДВОДНОГО ПЛАВСРЕДСТВА ОТ ОБНАРУЖЕНИЯ ГИДРОЛОКАТОРОМ | 2001 |
|
RU2195684C1 |
| ПОДВОДНОЕ РАЗВЕРТЫВАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2214656C2 |
Изобретение относится к области гидроакустики и может быть использовано для обнаружения и сопровождения подводной цели в морских акваториях. Существо способа заключается в том, что с помощью сфокусированного лазерного излучения в месте предполагаемого расположения цели в охраняемой морской акватории инициируют ударную звуковую волну или последовательность ударных звуковых волн. Отраженные от подводной цели звуковые волны вместе с инициированными звуковыми волнами принимаются гидроакустическим приемником с остронаправленной характеристикой направленности. Обработка принятых сигналов позволяет произвести обнаружение и сопровождение подводной цели. Для обеспечения скрытности системы обнаружения, что является достигаемым техническим результатом, амплитуду последовательности звуковых импульсов задают ниже или на уровне морских шумов или помех морской акватории. 6 з.п. ф-лы, 2 ил.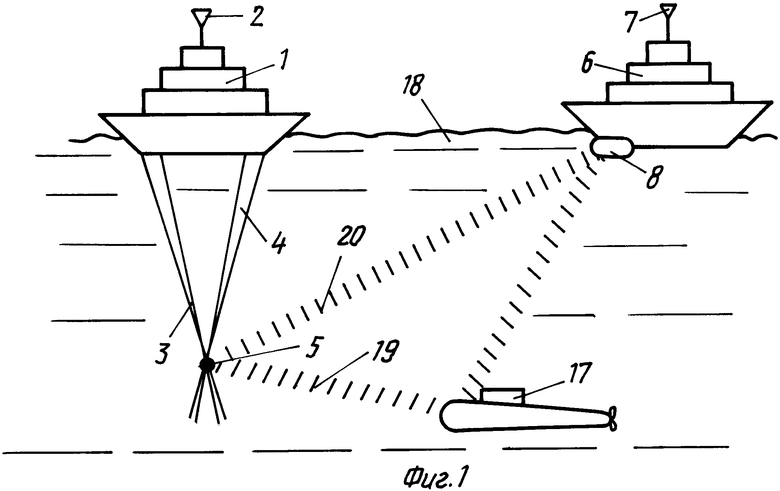
| US 5646907 А, 08.07.1997 | |||
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШУМОИЗЛУЧЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 1995 |
|
RU2105991C1 |
| СПОСОБ ЛИКВИДАЦИИ РАКЕТ | 1998 |
|
RU2139491C1 |
| US 5161125 A, 03.11.1992 | |||
| US 5316983 A, 31.05.1994. | |||

