Изобретение относится к технике проведения грузоподъемных операций, монтажных, ремонтных, подсобных и т.п. работ.
Известен грузоподъемный кран на транспортном средстве, содержащий поворотное в вертикальной плоскости основание в виде плоской треугольной фермы, на котором с помощью шарниров смонтированы три гидроцилиндра, штоки которых соединены между собой и с грузозахватным органом, при этом кран снабжен дополнительным гидроцилиндром для поворота основания (SU 594021, кл. B 66 C 23/44, 01.03.78).
Технический недостаток данного крана: недостаточная зона действия в горизонтальной плоскости.
Известен также кран-манипулятор, содержащий смонтированное на транспортном средстве поворотное в вертикальной и горизонтальной плоскостях основание в виде плоской треугольной фермы и три гидроцилиндра, корпуса которых шарнирно закреплены на вершинах основания, а штоки всех трех цилиндров соединены между собой и с грузозахватным органом, содержащий два гидроцилиндра для поворота основания, расположенные под углом друг к другу, причем штоки этих цилиндров соединены со стороной основания, противолежащей закрепленной на транспортном средстве вершине (RU 2053191 C1, кл. B 66 C 23/44, 27.01.96).
Технический недостаток этого крана-манипулятора: недостаточно широкие функциональные возможности и отсутствие средств для регулирования зоны действия и усилий в гидроцилиндрах.
Техническая задача: расширение функциональных возможностей, регулирование зоны действия и усилий в гидроцилиндрах за счет изменения положения точек крепления цилиндров на поворотном основании.
Согласно изобретению в кране-манипуляторе указанная сторона основания снабжена: с одной стороны - двумя установленными на своих опорах и расположенными на одной оси независимыми винтами, каждый из которых взаимодействует с гайкой-ползуном, шарнирно соединенной с соответствующим гидроцилиндром, шток которого соединен со штоками двух других цилиндров, с другой стороны - установленным на двух опорах винтом с правой и левой резьбой, взаимодействующей с гайками-ползунами, шарнирно соединенными с гидроцилиндрами поворота основания, оси которых совместно с участком винта и поперечиной транспортного средства образуют трапецию с возможностью ее преобразования в прямоугольник, при этом малая сторона трапеции расположена на винте. Все три винта имеют привод в виде маховика.
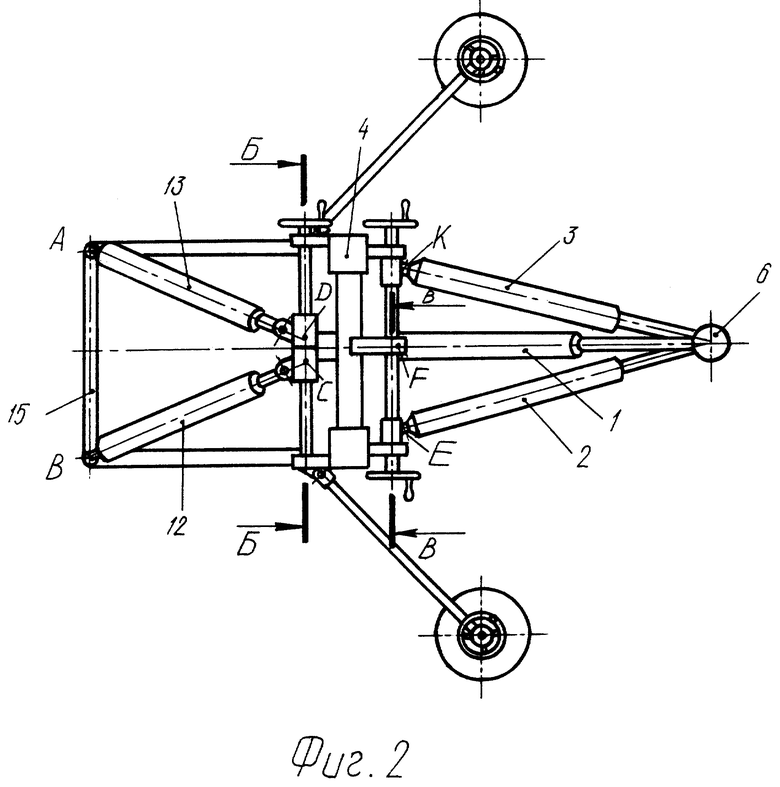
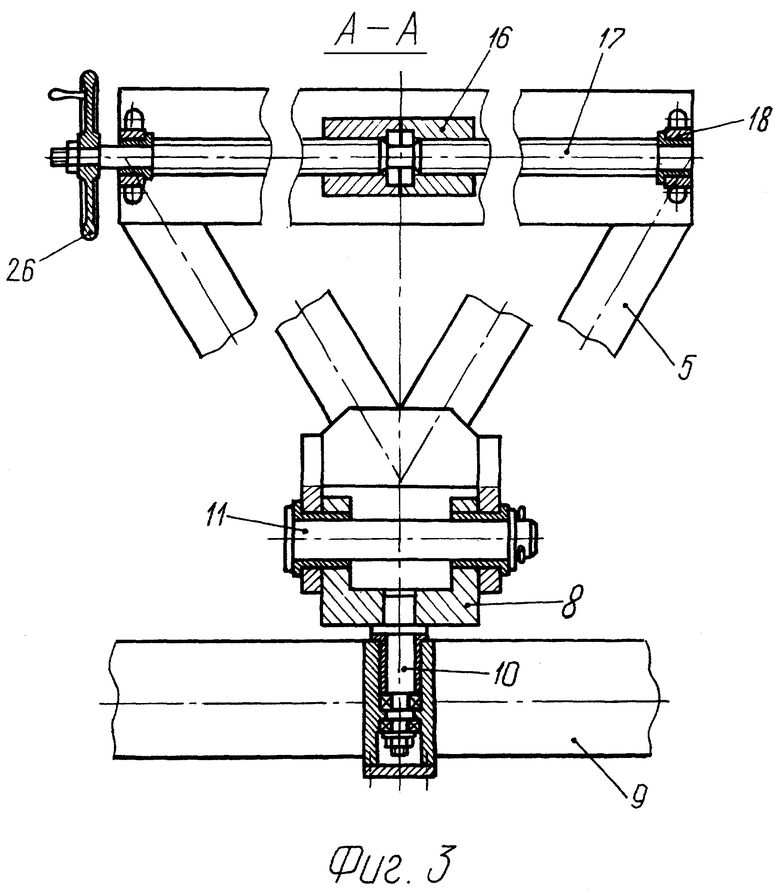
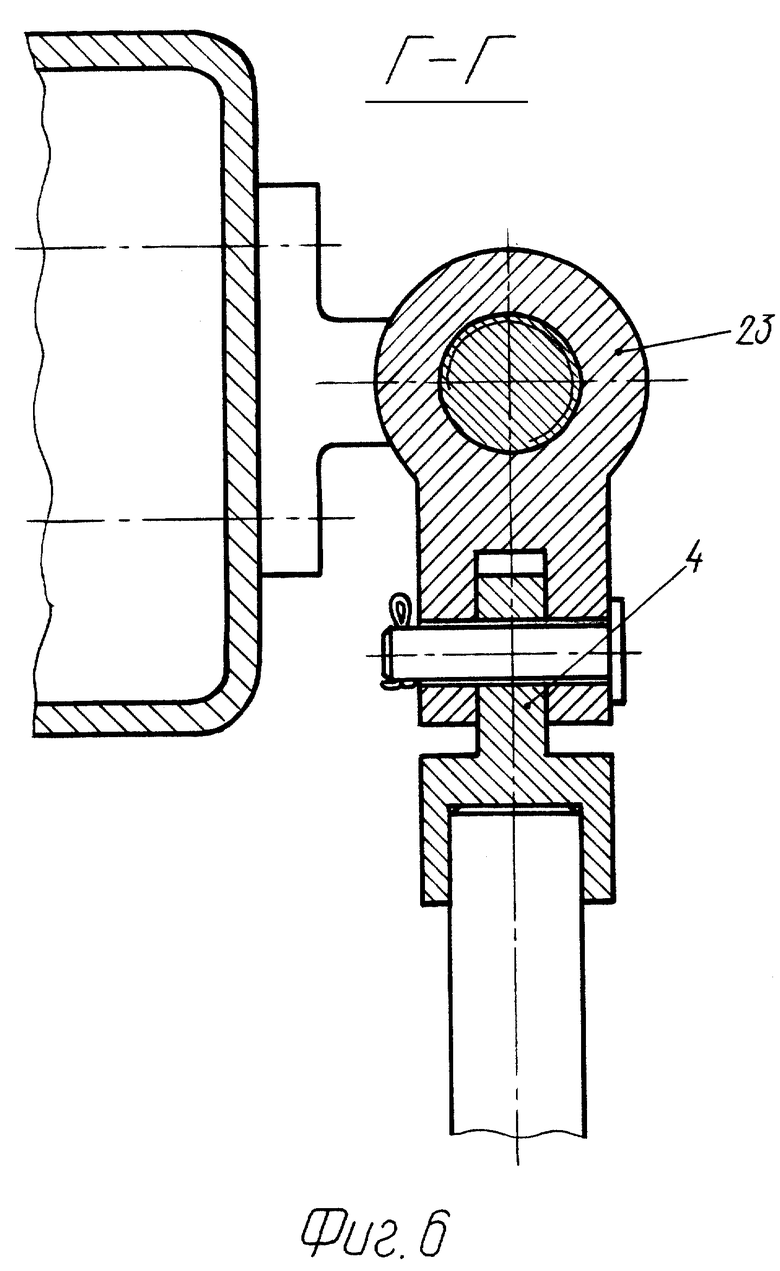
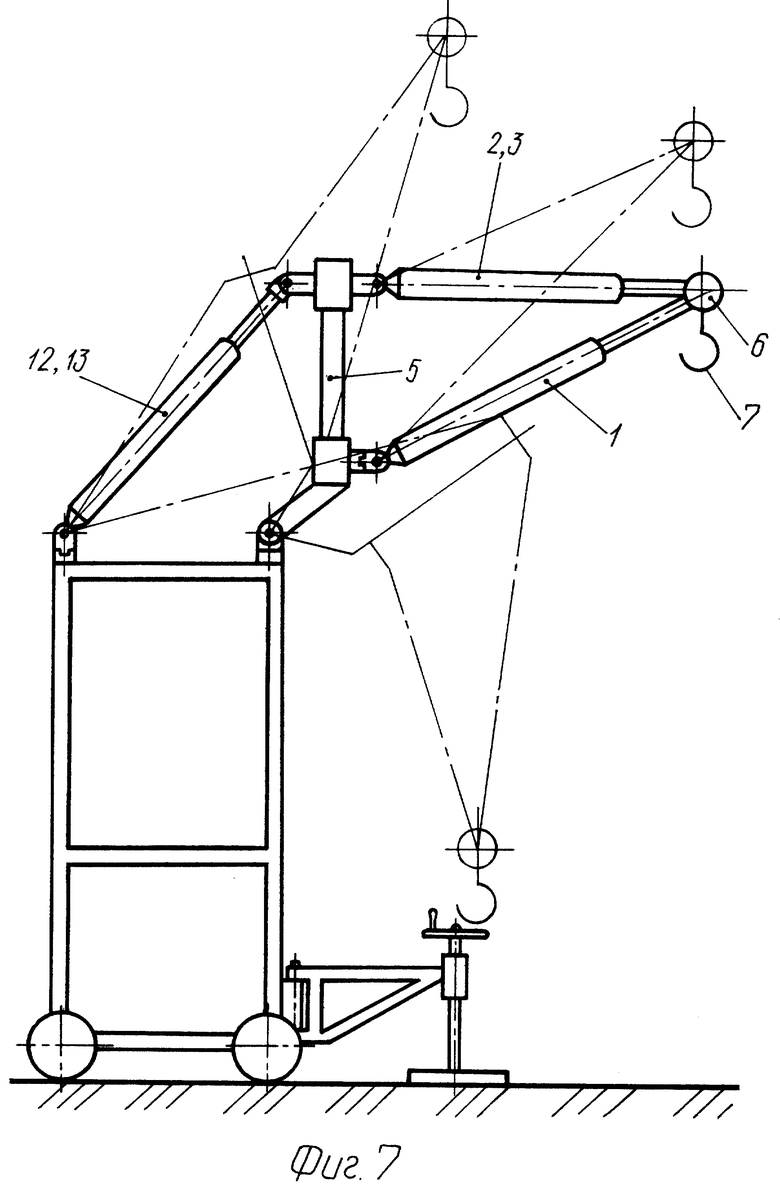
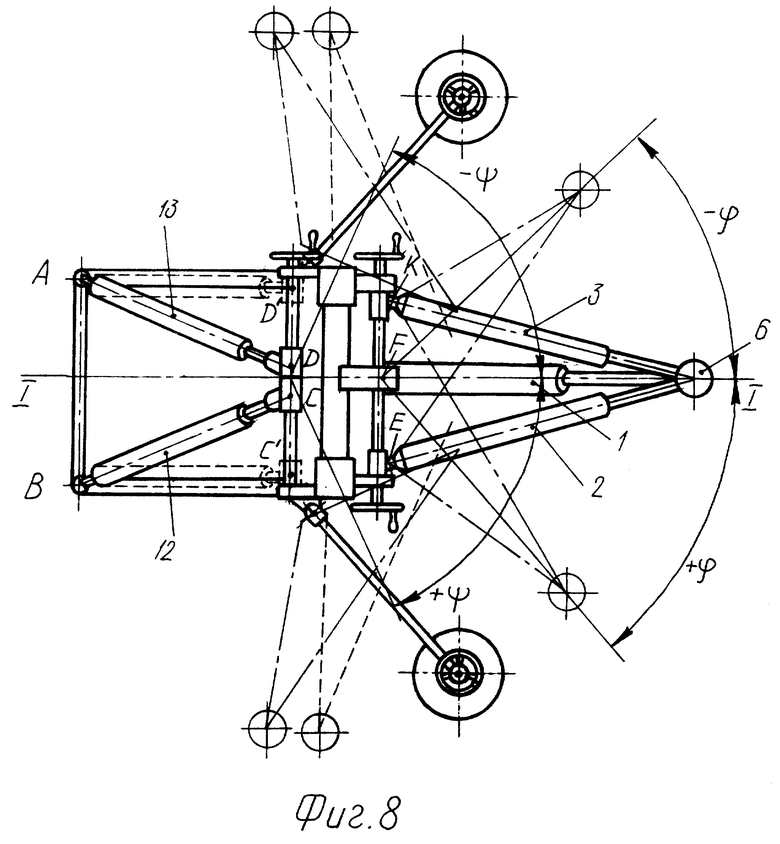
На фиг. 1 изображен общий вид крана-манипулятора, вид сбоку; на фиг. 2 - то же, вид в плане; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 и 5 - разрезы Б-Б и В-В на фиг. 2 соответственно; на фиг. 6 - разрез Г-Г на фиг. 5; на фиг. 7 - схема, иллюстрирующая работу крана-манипулятора, вид сбоку; на фиг. 8 - то же, вид в плане.
Основу рабочего оборудования крана-манипулятора составляют три гидравлических силовых цилиндра 1, 2 и 3 (фиг. 1 и 2). Корпуса этих цилиндров с помощью шарниров 4, имеющих две степени свободы, закреплены на вершинах основания 5. Противоположные концы (штоки) всех трех цилиндров сведены вместе при помощи особого шарнира 6, несущего функции головной траверсы, к которой присоединен также грузозахватный орган 7. Основание 5 выполнено в виде плоской треугольной фермы (фиг. 3). Основание одной из вершин смонтировано на транспортном средстве посредством опорно-поворотного устройства 8. Последнее закреплено на одной из поперечин 9 транспортного средства. Устройство 8 содержит вертикальную 10 и горизонтальную 11 взаимно перпендикулярные оси поворота.
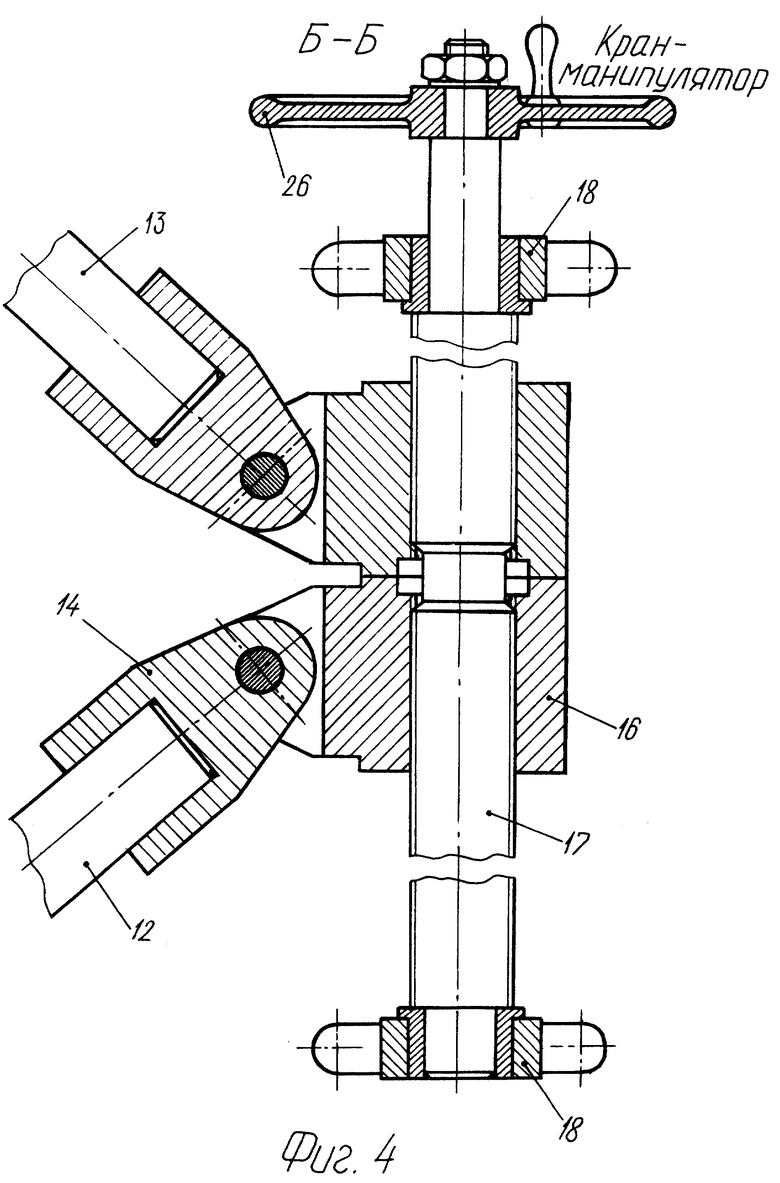
Для поворота основания предусмотрены два гидроцилиндра 12 и 13 (фиг. 1 и 2). Корпуса этих цилиндров с помощью шарниров 14 с двумя степенями свободы закреплены на концах второй поперечины 15 транспортного средства. Цилиндры 12 и 13 расположены под углом друг к другу, их противоположные концы (штоки) посредством подобных шарниров соединены с гайками-ползунами 16, взаимодействующими с винтом 17 с правой и левой резьбой (фиг. 3 и 4). Винт установлен на двух опорах 18 на стороне основания 5, противолежащей закрепленной на транспортном средстве вершине. Оси цилиндров 12 и 13 совместно с участком винта 17 и поперечиной 15 транспортного средства образуют трапецию ABCD (фиг. 2 и 8) с возможностью ее преобразования в прямоугольник ABC'D' при этом малая сторона CD трапеции расположена на винте.
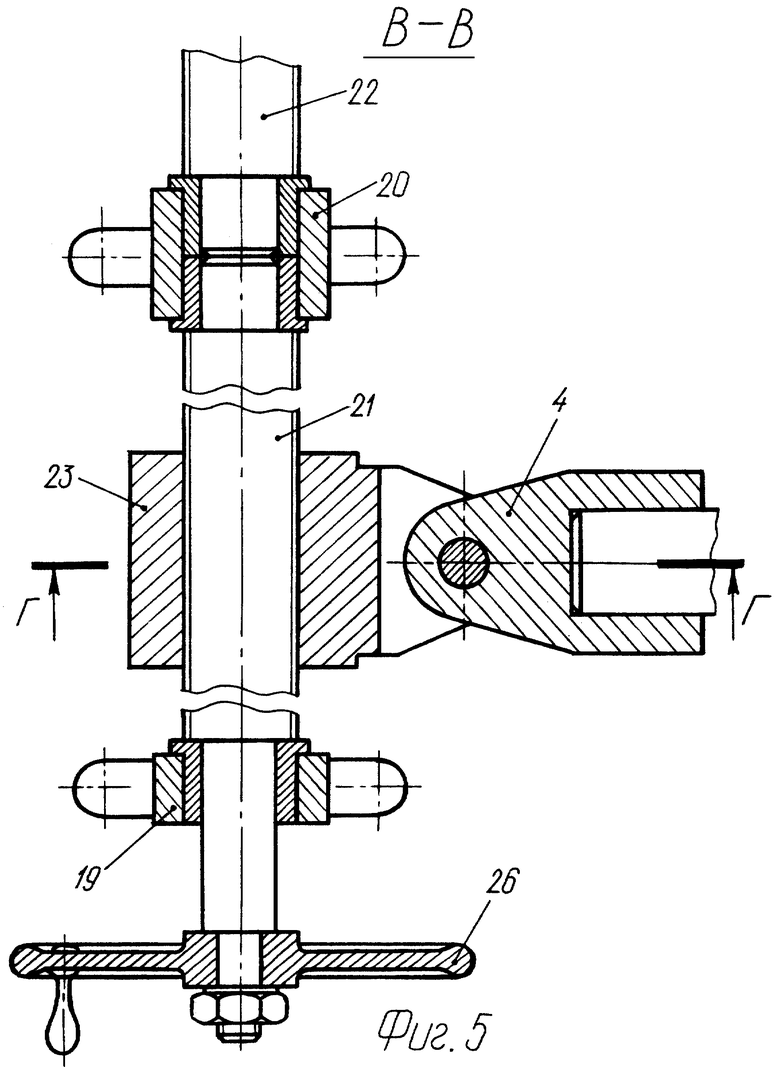
С другой стороны упомянутой стороны основания 5 установлены на своих опорах 19 и 20 (фиг. 5 и 6) и расположены на одной оси два независимых винта 21 и 22. Каждый винт взаимодействует с гайкой-ползуном 23, шарнирно соединенной через шарнир 4 с соответствующим гидроцилиндром 2 или 3, шток которого соединен со штоками двух других цилиндров. Транспортное средство может иметь различные схемно-конструктивные исполнения. В варианте, представленном на фиг. 1, 2, 7, 8, это передвижная специальная тележка 24, снабженная откидными опорами 25. Рама тележки представляет вертикальную четырехгранную ферму, внутри которой размещена гидросиловая установка с приводом от электродвигателя и распределительная гидроаппаратура, а снаружи - органы управления (не показаны). Винты 17, 21 и 22 имеют привод в виде маховика 26.
Кран-манипулятор работает следующим образом.
При изменении длины - перемещении штока с поршнем хотя бы одного гидроцилиндра 1, 2 или 3 - изменяется геометрическая форма пространственной структуры, образованной этими цилиндрами и основанием 5. Вследствие этого вершина структуры - ее шарнир (головная траверса) 6 - начинает перемещаться, увлекая за собой грузозахватный орган 7. Манипулируя работой одного, двух или всех трех цилиндров, головную траверсу выводят в заданное положение в пространстве. Некоторые положения цилиндров и шарнира 6 показаны на фиг. 7 и 8; в транспортном положении манипулятор максимально сокращает свои габариты путем втягивания штоков всех пяти цилиндров, включая цилиндры 12 и 13.
При задействовании гидроцилиндров 12 и 13 основанию 5 вместе с закрепленными на нем цилиндрами 1, 2 и 3 сообщаются дополнительные подвижности. Если штоки цилиндров 12 и 13 максимально сближены между собой - при соприкосновении гаек-ползунов 16, то при одновременном изменении длины этих цилиндров основание 5 с оборудованием разворачивается в вертикальной плоскости. Подобный разворот, но на другие углы, происходит и при удалении друг относительно друга гаек-ползунов 16, вплоть до параллельного расположения цилиндров 12 и 13 (фиг.8), когда трапеция ABCD преобразуется в прямоугольник ABC'D'. В этом случае основание разворачивается относительно горизонтальной оси 11 поворота опорно-поворотного устройства 8.
Если гидроцилиндры 12 и 13 являются сторонами трапеции ABCD, то при работе одного из этих цилиндров основанию 5 с оборудованием сообщается совмещенное движение одновременно в вертикальной и горизонтальной плоскостях. В этом случае основание разворачивается одновременно относительно вертикальной 10 и горизонтальной 11 осей поворота устройства 8. Возможды и иные сочетания работы гидроцилиндров 12 и 13, при этом угол ψ горизонтального разворота (фиг. 8) основания 5 зависит от размеров трапеции ABCD. Чем меньше сторона CD, тем больше ψ. По мере увеличения размера CD, что достигается вращением винта 17 посредством соответствующего маховика 26 и раздвижением гаек-ползунов 16 за счет правой и левой резьбы на винте, угол ψ уменьшается. Если цилиндры 12 и 13 располагаются параллельно (трапеция преобразуется в прямоугольник ABC'D'), то ψ = 0. При сдвинутых гайках-ползунах 16 угол ψ горизонтального разворота основания 5 составляет ± 50...65o (кроме размера CD обесценивается соотношением и других размеров системы). От значения угла ψ и хода штоков гидроцилиндров 12 и 13 зависит и угол поворота основания в вертикальной плоскости.
Если в процессе работы гидроцилиндры 12 и 13 сохраняют наклон друг относительно друга, то максимальные углы ψ поворота основания 5 в горизонтальной плоскости вправо и влево (при определенном значении стороны CD трапеции) имеют одинаковую величину, система является симметричной. При равенстве расстояний между шарнирами 4 верхних гидроцилиндров 2 и 3 относительно продольной оси I-I тележки 24 (EF=FK) углы Φ разворота в горизонтальной плоскости (вправо и влево) нижнего цилиндра 1, несущего функции телескопической стрелы, также имеют одинаковую величину - пространственная структура, образованная цилиндрами 1. . . 3 и основанием 5, в этом варианте является симметричной. При задействовании посредством своего маховика 26 одного из независимых винтов 21 или 22 соответствующая гайка-ползун 23 смещает шарнир одного из гидроцилиндров и сам цилиндр 2 или 3 относительно продольной оси I-I, при этом EF≠FK. Вследствие этого нарушается симметрия указанной пространственной структуры и максимальные углы Φ поворота цилиндра 1 вправо и влево имеют различные значения. Одновременно с этим изменяются и углы поворота этого цилиндра в вертикальной плоскости. Приведением в действие обоих независимых винтов 21 и 22 получают (за счет соответствующего перемещения гаек-ползунов 23): различные, но симметричные, максимальные значения углов ψ горизонтального разворота цилиндра 1 Φmax = ± 65o; необходимые несимметричные углы Φ. Суммарные углы поворота цилиндра 1 вместе с основанием 5: Φ+ψ.
Указанные перемещения гаек-ползунов 16 и 23, приводящие к изменениям местоположения шарниров 4 гидроцилиндров путем варьирования размером CD на винте 17 и размерами EF и FK на независимых винтах 21 и 22, вызывают также изменение усилий в гидроцилиндрах 1...3, 12, 13 и грузовой устойчивости всего крана-манипулятора, включая его тележку 24 с выносными опорами 25. Наряду с этим изменяется зона действия и функциональные возможности манипулятора. Высота подъема грузозахватного органа 7 обеспечивается также высотой тележки 24. Шарниры 4 и 14 с двумя степенями свободы не препятствуют пространственным перемещениям гидроцилиндров 1. . .3 относительно основания 5 и цилиндров 12 и 13 относительно поперечины 15 транспортного средства и относительно того же основания 5, а особый шарнир 6 обеспечивает взаимные эволюции штоков цилиндров 1. ..3 друг относительно друга и относительно штанг, несущих грузозахватный орган 7, причем под действием гравитационной силы штанги сохраняют вертикальное положение.
Таким образом, описанные особенности устройства и принципа действия крана-манипулятора обеспечивают расширение его функциональных возможностей, регулирование зоны действия и усилий в гидроцилиндрах, что достигается простыми средствами - изменением положения точек крепления цилиндров на поворотном основании.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран-манипулятор | 2024 |
|
RU2823660C1 |
| Кран-манипулятор | 2019 |
|
RU2722762C1 |
| Кран-манипулятор | 2021 |
|
RU2760370C1 |
| КРАН-МАНИПУЛЯТОР | 2001 |
|
RU2207317C1 |
| Манипулятор-трипод параллельно-последовательной структуры | 2016 |
|
RU2616493C1 |
| Кран-манипулятор | 2019 |
|
RU2725367C1 |
| Кран-манипулятор | 2022 |
|
RU2776888C1 |
| КРАН-МАНИПУЛЯТОР | 1992 |
|
RU2053191C1 |
| Манипулятор-трипод промышленного назначения | 2017 |
|
RU2651781C1 |
| Кран-манипулятор с расширенной зоной действия | 2021 |
|
RU2768059C1 |
Изобретение относится к технике проведения грузоподъемных операций, монтажных, ремонтных, подсобных и т.п. работ. Кран-манипулятор содержит смонтированное на транспортном средстве поворотное в вертикальной и горизонтальной плоскостях основание в виде плоской треугольной фермы и три гидроцилиндра, корпуса которых шарнирно закреплены на вершинах основания, а штоки всех трех цилиндров соединены между собой и грузозахватным органом. Кран содержит также два гидроцилиндра поворота основания, расположенные под углом друг к другу, их штоки соединены со стороной основания, противолежащей закрепленной на транспортном средстве вершине. Указанная сторона основания снабжена с одной стороны двумя независимыми винтами, каждый из которых взаимодействует с гайкой-ползуном, шарнирно соединенной с соответствующим цилиндром, шток которого соединен со штоками двух других цилиндров, а с другой стороны - винтом с правой и левой резьбой, взаимодействующей с гайками-ползунами, шарнирно соединенными с цилиндрами поворота основания. Изобретение направлено на расширение функциональных возможностей, регулирование зоны действия и усилий в гидроцилиндрах. 1 з.п. ф-лы, 8 ил.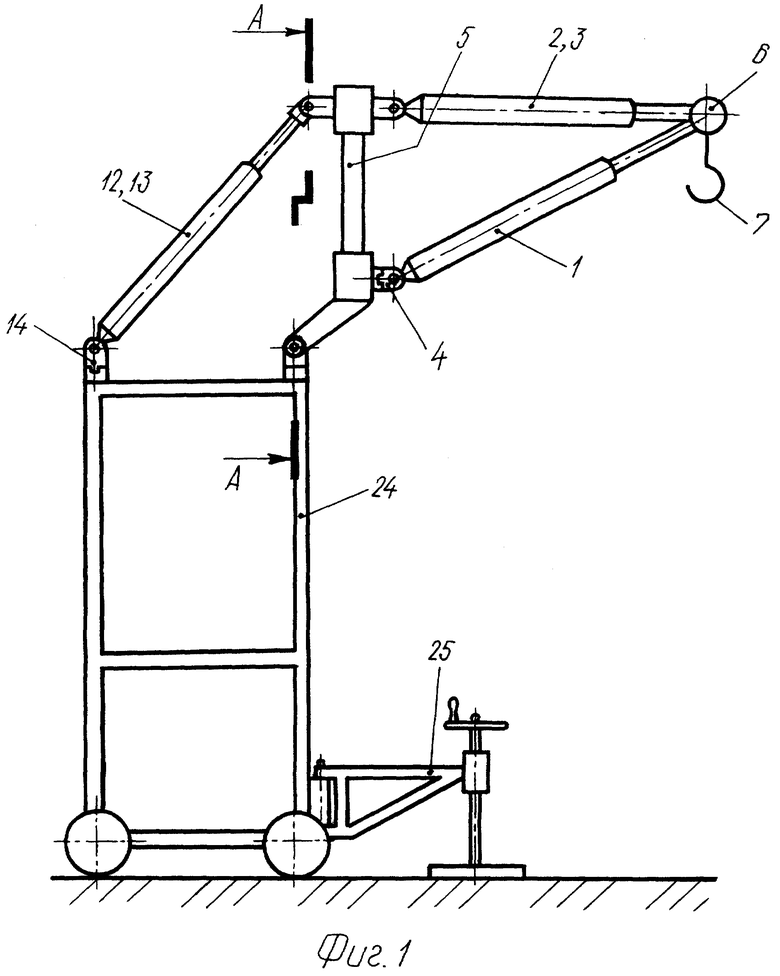
| КРАН-МАНИПУЛЯТОР | 1992 |
|
RU2053191C1 |
| Грузоподъемный кран | 1976 |
|
SU594021A1 |
| Устройство для подъема и перемещения грузов | 1983 |
|
SU1207847A1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 0 |
|
SU274318A1 |
| Грузоподъемное устройство | 1983 |
|
SU1240728A1 |
