Изобретение относится к области авиационного приборостроения.
Системы измерения курса являются основным навигационным средством на борту самолетов и вертолетов. От качества и надежности их работы во многом зависит эффективность их применения.
На борту современных летательных аппаратов (ЛА) для измерения курса, а также параметров крена и тангажа широкое применение нашли системы на основе гироскопических устройств - курсовые системы (КС), гировертикали (ГВ), курсовертикали (KB) и инерциальные навигационные системы (ИНС). Описание некоторых из них приведено в книге "Аппаратура измерения курса и вертикали на воздушных судах гражданской авиации". М. : Машиностроение, 1989.
КС, как правило, объединяют в своем составе гироскопический и магнитный датчики курса и служат для измерения и выдачи потребителям ортодромического, истинного и магнитного курсов ЛА. С помощью гироскопических датчиков в составе ГВ измеряют углы крена и тангажа. С помощью гироскопических датчиков в составе KB и ИНС, которые могут быть платформенного или бесплатформенного типа, измеряют одновременно углы курса, крена, тангажа, составляющие векторов ускорения, угловой и линейной скорости.
Измерение курса, крена и тангажа с помощью гироскопических датчиков базируется на свойстве гироскопов или их аналогов сохранять неизменную ориентацию в пространстве или измерять угловую скорость изменения соответствующих параметров.
Системы для измерения курса, а также крена и тангажа относятся к основным навигационным средствам на борту самолетов и вертолетов. От качества и надежности их работы во многом зависит эффективность применения этих ЛА. Поэтому в составе бортового оборудования ЛА всегда присутствуют, в какой-либо комбинации системы измерения курса и крена, тангажа. Например, это могут быть одновременно КС и ГВ или KB, или ИНС.
В силу важности параметра курса, в составе бортового оборудования ЛА, как правило, осуществляют дублирование канала его измерения. Например, как показано на стр. 246 вышеупомянутой книги "Аппаратура измерения курса и вертикали на воздушных судах гражданской авиации", в составе бортового оборудования самолета Ил-86 установлено три комплекта инерциальной курсовертикали ИКВ-72.
В силу массогабаритных и экономических ограничений, в составе бортового оборудования некоторых ЛА не всегда представляется возможным осуществить резервирование КС. Поэтому отказ КС на таких ЛА приводит к существенному снижению эффективности применения ЛА. Повышение надежности определения курса может быть осуществлено за счет обработки сигналов датчиков угловой скорости (ДУС), которые используются в контуре управления ЛА.
В настоящее время в составе бортового оборудования ЛА широкое применение нашли спутниковые навигационные системы (СНС), обеспечивающие высокоточное измерение координат местоположения и составляющих вектора скорости ЛА в географической системе координат.
В связи с этим известна также система, в которой повышение надежности определения курса обеспечивается использованием путевого угла, рассчитанного по сигналам о составляющих вектора скорости от спутниковой навигационной системы (СНС). Описание такой системы приведено в патенте РФ RU 2077028 С1 "Комплексная навигационная система".
Указанная "Комплексная навигационная система" по патенту РФ RU 2077028 С1 является наиболее близким аналогом к заявляемой "Комплексной системе определения курса".
Данная система содержит ИНС, спутниковую навигационную систему (СНС), пульт управления, датчик магнитного курса, датчик сигнала обжатия шасси, блок вычисления модуля относительной скорости, пороговое устройство, логический блок, ключ.
Данная система предназначена, прежде всего, для довыставки гироскопического датчика курса, из состава ИНС, в процессе разгона ЛА по взлетно-посадочной полосе.
С учетом того, что ИНС представляет собой устройство, выполняющее одновременно функции КС, ГВ и ДУС, для целей большей общности, а также с учетом только существенных для предлагаемого изобретения признаков, в дальнейшем рассматриваем систему-прототип как состоящую из КС, ГВ, блока ДУС (БДУС), блока определения скорости курса (БОСК), интегратора, устройства коммутации (УК), СНС и блока определения путевого угла (БОПУ).
Основным устройством для измерения курса в составе данной системы служит КС. Но гироскопические датчики курса из состава КС, как правило, не достаточно точны и имеют увеличивающуюся во времени погрешность. Погрешности магнитных датчиков курса из состава КС также велики и кроме этого случайным образом зависят от координат местоположения, времени года и суток, природных электромагнитных явлений и других случайных факторов.
В составе данной системы по сигналам крена, тангажа и угловой скорости определяется скорость изменения курса, интеграл от которой в полете, при отказе КС, используется в качестве курса ЛА.
Но, как правило, датчики угловой скорости имеют повышенные погрешности и курс, полученный интегрированием скорости изменения курса, будет очень грубым.
В составе данной системы по сигналам от СНС о составляющих вектора скорости ЛА в географической системе координат VN и VE также определяется путевой угол, который в полете, при отказе КС и ДУС, используется в качестве курса ЛА.
Но в сигнале путевого угла не учитывается снос ЛА и использование его в качестве курса обосновано только при отсутствии бокового движения ЛА.
Предлагаемая комплексная система определения курса позволяет обеспечить повышение точности определения курсовых параметров ЛА.
На многих ЛА, особенно на вертолетах, по-прежнему широко применяются доплеровские измерители скорости (ДИС), обеспечивающие высокоточное измерение составляющих вектора скорости ЛА в связанной системе координат.
По данным от ДИС о составляющих вектора скорости ЛА в связанной системе координат VX, VY и VZ, а также параметрах крена и тангажа от ГВ может быть определено направление вектора путевой скорости ЛА относительно проекции продольной оси ЛА на горизонтальную плоскость (угол сноса).
Разность между путевым углом и углом сноса может быть использована в качестве курса ЛА
Таким образом, технический результат в части повышения точности определения курса и соответственно повышения эффективности самолетовождения обеспечивается введением в состав комплексной системы определения курса доплеровского измерителя скорости (ДИС), блока определения угла сноса (БОУС) и разностного устройства (РУ).
Однако СНС и ДИС являются радиотехническими устройствами, которые подвержены помехам, имеют перерывы в своей работе и имеют повышенные погрешности на маневренных участках полета. Поэтому курс, полученный с использованием сигналов СНС и ДИС, будет иметь прерывистый характер и включать в свой состав высокочастотную погрешность. Сигналы курса от КС и курса, полученного интегрированием скорости изменения курса, имеют непрерывный характер и включают в свой состав низкочастотную погрешность.
Таким образом, технический результат в части повышения точности определения курса также обеспечивается введением в состав комплексной системы определения курса блока оценки погрешности КС (БОПКС), блока оценки погрешности курса по данным об угловой скорости (БОПУС) и дополнительных четырех разностных устройств (РУ2, РУ3, РУ4, РУ5).
На фиг. 1 и 2 представлены блок-схемы предлагаемой комплексной системы определения курса, обеспечивающей достижение поставленных целей и содержащей: 1 - автономную КС, 2 - ГВ, 3 - БДУС, 4 - БОСК, 5 - интегратор, 6 - УК, 7 - СНС, 8 - БОПУ, 9 - РУ1, 10 - ДИС, 11 - БОУС, 12 - РУ2, 13 - БОПКС, 14 - РУ3, 15 - РУ4, 16 - БОПУС, 17 - РУ5.
С помощью КС определяют курс ЛА ψКС. В составе комплексной системы определения курса КС связана с УК или РУ3.
С помощью ГВ определяют параметры углового положения ЛА относительно местного горизонта (крен γ, тангаж υ). В составе комплексной системы определения курса ГВ связана с БОСК и БОУС.
С помощью БДУС определяют составляющие вектора угловой скорости ЛА ωX, ωY, ωZ в связанной системе координат. В составе комплексной системы определения курса БДУС связан с БОСК.
С помощью БОСК определяют угловую скорость изменения курса ЛА ωψ в соответствии с соотношением (для полета с υ<80o):
ωψ= (ωY•cosγ-ωZ•sinγ)/cosυ.
В составе комплексной системы определения курса БОСК связан с интегратором, ГВ, БДУС и БОПУС.
С помощью интегратора определяют курс ЛА ψИУС в соответствии с соотношением:
ψИУС= ψ0+∫ωψdt.
Начальное состояние интегратора ψ0 задается в момент перевода системы в рабочий режим по сигналу из УК: ψ0= ψУК.
В составе комплексной системы определения курса интегратор связан с БОСК с УК и РУ5.
С помощью СНС определяют составляющие вектора путевой скорости ЛА в географической системе координат VN и VЕ. В составе комплексной системы определения курса СНС связана с БОПУ.
С помощью БОПУ определяют путевой угол ЛА ψСНС в соответствии с соотношением:
ψСНС = arctg(VE/VN).
В составе комплексной системы определения курса БОПУ связан с СНС и РУ1.
С помощью ДИС определяют составляющие вектора путевой скорости ЛА в связанной самолетной системе координат VX, VY и VZ. В составе комплексной системы определения курса ДИС связан с БОУС.
С помощью БОУС определяют направление вектора путевой скорости ЛА относительно проекции продольной оси ЛА на горизонтальную плоскость ψДИС (угол сноса ЛА) в соответствии с соотношениями:
ψДИС = arctg(VZГ/VXГ);
VXГ= VX•cosϑ-VY•cosγ•sinϑ+VZ•sinϑ•sinγ;
VZГ= VY•sinγ-VZ•cosγ.
В составе комплексной системы определения курса БОУС связан с ДИС, ГВ и РУ1.
С помощью РУ1 определяют курс ЛА относительно географического меридиана - разность сигналов от БОПУ и БОУС:
ψИ= ψСНС-ψДИС.
В составе комплексной системы определения курса РУ1 связано с БОПУ, БОУС, УК, РУ2 и РУ4.
С помощью РУ2 осуществляют измерение погрешности в откорректированном сигнале курса от КС:
Δψ
В составе комплексной системы определения курса РУ2 связано с РУ1, РУ3 и БОПКС.
С помощью БОПКС осуществляют оценку погрешности курса, полученного от КС δψКС.
Как правило, погрешности КС по курсу ΔψКС с достаточной степенью точности описываются соотношением:
ΔψКС= Δψ0+ωψ•t,
где Δψ0 и ωψ - постоянные величины случайного характера, t - время работы системы.
Оценка погрешности определения курса по данным от КС δψКС может быть осуществлена с использованием любого из известных методов оптимального оценивания случайных сигналов. Например, в БОПКС может быть использован метод оптимальной фильтрации Калмана. Описание этого метода приведено в книге Ривкин С. С. и др. Статистическая оптимизация навигационных систем. - Л. : Судостроение, 1976.
В составе комплексной системы определения курса БОПКС связан с РУ2 и РУ3.
С помощью РУ3 осуществляют компенсацию в сигнале курса от КС оценки ее погрешности δψКС:
ψ
В составе комплексной системы определения курса РУ3 связано с РУ2, КС, БОПКС и УК.
С помощью РУ4 осуществляют измерение погрешности в откорректированном сигнале курса, полученного интегрированием угловой скорости изменения курса:
Δψ
В составе комплексной системы определения курса РУ4 связано с РУ1, РУ5 и БОПУС.
С помощью БОПУС осуществляют оценку погрешности курса, полученного интегрированием угловой скорости изменения курса δψУС.
Как правило, погрешности датчиков угловой скорости с достаточной степенью точности описываются соотношением:
Δωψ= Δω0+K•ωψ.
где Δω0 и К - постоянные величины случайного характера.
Оценка погрешности определения курса, полученного интегрированием угловой скорости изменения курса δψУС, может быть осуществлена с использованием любого из известных методов оптимального оценивания случайных сигналов. Например, в БОПУС, как и в БОПКС, может быть использован метод оптимальной фильтрации Калмана.
В составе комплексной системы определения курса БОПУС связан с РУ4, РУ5 и БОСК.
С помощью РУ5 осуществляют компенсацию в сигнале курса, полученного интегрированием угловой скорости изменения курса оценки его погрешности δψУС:
ψ
В составе комплексной системы определения курса РУ5 связано с РУ4, интегратором, БОПУС и УК.
УК предназначено для коммутации сигналов курса, выдаваемых из РУ1, КС или РУ3, интегратора или РУ5.
УК в составе комплексной системы определения курса связано с РУ1, КС или РУ3, интегратором или РУ5.
Выход УК является выходом всей системы.
Таким образом, на примерах реализации показано достижение технических результатов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2178145C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178147C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НА БОРТУ ЛЕТАТЕЛЬНОГО АППАРАТА И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2461801C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2520872C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НА БОРТУ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2011 |
|
RU2486527C2 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ ПРИ ЛИНЕЙНОМ ДВИЖЕНИИ ОБЪЕКТА | 2002 |
|
RU2210741C1 |
| КОМПЛЕКСНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА НАВИГАЦИИ И НАВЕДЕНИЯ | 1999 |
|
RU2154283C1 |
| КОМПЛЕКСНАЯ КУРСОВАЯ СИСТЕМА | 1996 |
|
RU2098322C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ФОРМИРОВАНИЯ СОСТАВЛЯЮЩИХ ПУТЕВОЙ СКОРОСТИ | 2000 |
|
RU2168153C1 |
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА | 1996 |
|
RU2089450C1 |
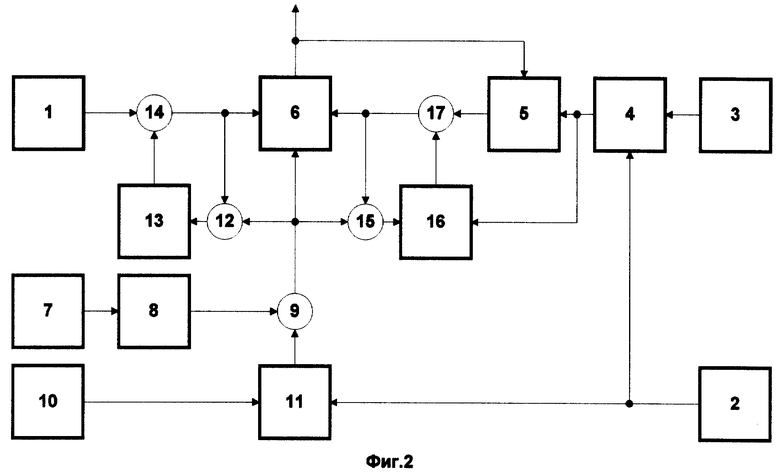
Система предназначена для использования в составе комплексов навигационного оборудования летательных аппаратов (ЛА). В комплексную систему определения курса, содержащую автономную курсовую систему, гировертикаль, блок датчиков угловой скорости, блок определения скорости курса, интегратор, устройство коммутации, спутниковую навигационную систему, блок определения путевого угла, дополнительно введены доплеровский измеритель скорости, блок определения угла сноса, блок оценки погрешности курса от курсовой системы, блок оценки погрешности курса по данным об угловой скорости и пять разностных устройств, что обеспечивает повышение надежности и точности определения курса ЛА, а также расширение функциональных возможностей и улучшение возможностей по контролю сигналов от курсовой системы и блока датчиков угловой скорости. 1 з. п. ф-лы, 2 ил.
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2077028C1 |
| Прием удаления железа из двуокиси олова, полученной из отбросов белой жести | 1929 |
|
SU15130A1 |
| Радиотелеграфная мачта | 1922 |
|
SU1530A1 |
| US 3630079, 28.12.1971. | |||

