Изобретение относится к области авиационного приборостроения, в частности к бортовому оборудованию, обеспечивающему навигацию самолетов и целеуказание на заданные цели.
Из известных аналогов, приведенных, например, в книге [1] под редакцией Харисова В. А. , Перова А.И., Болдина В.А. "Глобальная спутниковая радионавигационная система ГЛОНАСС", Москва, ИПРЖР, 1998; в книге [2] Бабича О.А. "Обработка информации в навигационных комплексах", Москва, Машиностроение, 1991 г., наиболее близким является прицельно-навигационный комплекс, описание которого приведено в [2], на стр. 476-491. Данный комплекс содержит последовательно соединенные инерциально-спутниковую (взаимосвязанные спутниковую систему навигации и инерциальную систему навигации [2], стр. 485) и систему целеуказания (радиолокационную или оптико-локационную станцию [2], стр. 485).
В инерциально-спутниковой системе осуществляется коррекция медленноменяющихся инерциальных данных и подавление высокочастотных шумов данных от навигационных спутников. На основе данных об углах эволюций самолета и собственных измерений (дальность до цели, углы визирования цели) в системе целеуказания формируются координаты целеуказания. При воздействии специальнопоставленных помех, в дальномерном канале системы целеуказания возможно значительное увеличение систематической погрешности по дальности (увод по дальности) и при работе от навигационных спутников GPS в режиме несанкционированного доступа ([1], стр. 256) систематические погрешности по координатам могут достигать 200 м ([1], стр. 264).
Задачей изобретения является повышение точности работы комплекса.
Технический результат достигается тем, что в прицельно-навигационный комплекс, содержащий последовательно-соединенные инерциально-спутниковую систему и систему целеуказания, дополнительно введены блок формирования параметрических функций и, включенные между первым выходом системы целеуказания и входом инерциально-спутниковой системы, последовательно соединенные блок разности, блок задержки, блок выделения погрешностей, блок оптимальной обработки информации, второй выход которого подключен ко второму входу системы целеуказания, второй выход которой подключен ко второму входу блока задержки, второй выход которого подключен ко входу блока формирования параметрических функций, выход которого подключен ко второму входу блока выделения погрешностей, причем на второй вход блока разности подключен второй выход инерциально-спутниковой системы.
На чертеже представлена блок-схема предлагаемого комплекса, содержащего:
1 - инерциально-спутниковая система ИСС; 2 - система целеуказания СЦУ, 3 - блок оптимальной обработки информации БООИ, 4 - блок разности БР, 5 - блок формирования параметрических функций БФПФ, 6 - блок выделения погрешностей БВП, 7 - блок задержки БЗ.
Связи между блоками выполнены, например, в стандартном последовательном коде.
Примеры выполнения стандартных арифметических устройств (БР 4, БФПФ 5, БВП 6, БЗ 7), выполняющих операции суммирования, разности, умножения, деления, задержки (временного запоминания) сигналов, приведены в книге [3] Преснухина Л.Н., Нестерова П.В. "Цифровые вычислительные машины", Москва, Высшая школа, 1981, стр. 16.
Система работает следующим образом.
ИСС 1 измеряет географические координаты местоположения самолета A1, A2, A3 (с погрешностями X1, X2, X3, близкими к систематическим), которые, как отмечено выше, в последовательном коде с второго выхода ИСС 1 подаются на второй вход БР 4, и углы эволюций самолета курс A4, крен A5, тангаж A6 (с погрешностями X4, X5, X6, близкими к систематическим), которые с первого выхода ИСС 1 подаются на первый вход СЦУ 2, измеряющей дальность до цели A7, и углы визирования цели A8, A9 (соответственно с погрешностями 

 где X7, X8, X9 - систематические погрешности,
где X7, X8, X9 - систематические погрешности,  флюктуационные погрешности типа белого шума). В СЦУ 2 в соответствии с измеренными и поступившими параметрами формируются координаты цели относительно самолета в его осях ([2], стр. 227)
флюктуационные погрешности типа белого шума). В СЦУ 2 в соответствии с измеренными и поступившими параметрами формируются координаты цели относительно самолета в его осях ([2], стр. 227)
S1=A7cosA8cosA9, S2=A7sinA8cosA9, S3=A7sinA9
и географические координаты цели относительно самолета
A1Ц=S1cosA6sinA4-S2(cosA5 sinA6cosA4-sinA5sinA4)+S3 (cosA5sinA4+sinA5sinA6cosA4),
A2Ц=-S1cosA6sinA4+S2(cosA5 cosA4sinA6+sinA5cosA4+S3 (cosA4cosA5-sinA5sinA6sinA4),
A3Ц=S1sinA6+S2cosA5cosA6- S3sinA5cosA6.
Сигналы S1, S2, S3, sinA4, cosA4, sinA5, cosA5, sinA6, cosA6, A7, sinA8, cosA8, sinA9, cosA9 со второго выхода СЦУ 2 поступают на второй вход БЗ 7.
Сигналы A1Ц, A2Ц, A3Ц с первого выхода СЦУ 2 поступают на первый вход БР 4. При известных, введенных в БР 4 как опорные сигналы перед полетом (или в полете), географических координатах лоцируемой цели A10, A20, A30 в БР 4 на стандартных арифметических операциях суммирования и разности формируются сигналы при i = 1, 2, 3
где частные производные ([4], Боднер В.А. "Приборы первичной информации", Москва, Машиностроение, 1981, стр. 102)


При этом для случайных процессов типа белого шума  с дисперсиями Cк2 будет
с дисперсиями Cк2 будет 
тогда
этот сигнал с выхода БР 4 поступает на первый вход БЗ 7, выполняющий стандартную операцию задержки поступавших сигналов (временного запоминания) на малое время 


или в общем виде
при этом τ = 0 при i = 1, 2, 3; τ = τ1 при i = 4, 5, 6, τ = τ2 при i = 7, 8, 9;
a11=a22=a33=a41=a52=a63= a71=a82=a93=1;
a12= a13= a21=a23=a31=a32= a42=a43=a51=a53=а61=a62=a72 =a73=a81=a83=a91= a92=0:
Сигнал bi(t-τ) с первого выхода БЗ 7 поступает на первый вход БВП 6.
Сформированные в БЗ 7 сигналы
со второго выхода БЗ 7 поступают на вход БФПФ 5, являющимся стандартным арифметическим устройством, в котором по поступившим сигналам на операциях умножения, суммирования, разности формируются параметрические функции
a14(t-τ)-a19(t-τ),
a24(t-τ)-a29(t-τ),...,
a94(t-τ)-a99(t-τ),
F
которые с выхода БФПФ 5 поступают на второй вход БВП 6, являющийся стандартным арифметическим устройством, в котором на операциях умножения, суммирования, разности, деления формируются сигналы погрешностей  и функции fк
и функции fк
 ,
,
где ([5] , Бронштейн И.Н., Семендяев К.А. "Справочник по математике", Москва, Наука, 1983 г. стр. 157-163, [6] Кузовков Н. Т., Салыев О.С. "Инерциальная навигация и оптимальная фильтрация", Москва, Машиностроение, 1982, Стр. 104-105) определитель системы
Здесь знак (-1)Z(π) определяется числом Z(π) инверсий подстановки
сумма из 9! слагаемых, являющихся  - произведениями из девяти сомножителей каждое, содержащее по одному элементу из каждой строки и по одному элементу из каждого столбца, а
- произведениями из девяти сомножителей каждое, содержащее по одному элементу из каждой строки и по одному элементу из каждого столбца, а
(здесь вместо a11, ... , a91 подставляются b1, ... , b9), ... ,
(здесь вместо a19, ... , a99 подставляются b1, ... , b9),
(здесь вместо a11, ... , a91 подставляется F12, ... , F92),
(здесь вместо a19, ... , a99 подставляются F12, ... , F92).
Сигналы  fк (к=1, ... , 9) с выхода БВП 6 поступают на вход БООИ 3, содержащий девять оптимальных фильтров ([7] Сейдж Э., Мелс Д. "Теория оценивания и ее применение в связи и управлении". Москва, Связь, 1976, стр. 287-289) по каждому сигналу xk выполняются операции:
fк (к=1, ... , 9) с выхода БВП 6 поступают на вход БООИ 3, содержащий девять оптимальных фильтров ([7] Сейдж Э., Мелс Д. "Теория оценивания и ее применение в связи и управлении". Москва, Связь, 1976, стр. 287-289) по каждому сигналу xk выполняются операции:
- интегрирования ∫fк(t)dt
- деления 
- разности 
- умножения 
- интегрирования 
где  оптимальные оценки погрешностей на фоне шумов с дисперсиями f
оптимальные оценки погрешностей на фоне шумов с дисперсиями f
Например, при fк=1=const дисперсия погрешности
Dxк= ηк= (t+Τo)-1
где Τ
Видно, что с течением времени Dxк--->0.
Математическое ожидание  систематических составляющих
систематических составляющих
при
nк= (t+Τo)-1, 
откуда следует, что с течением времени  т.е. оптимальная оценка стремится к действительному значению систематической погрешности Xк.
т.е. оптимальная оценка стремится к действительному значению систематической погрешности Xк.
С первого выхода БООИ 3 сигналы оценок систематических погрешностей координат местоположения  и углов эволюций самолета
и углов эволюций самолета  поступает на вход ИСС 1.
поступает на вход ИСС 1.
Со второго выхода БООИ 3 сигналы оценок систематических составляющих дальности до цепи и углов визирования цели  поступают на второй вход СЦУ 2, в котором осуществляется коррекция параметров при к=7, 8, 9.
поступают на второй вход СЦУ 2, в котором осуществляется коррекция параметров при к=7, 8, 9.

где с течением времени (t+To)-1→ 0,  т.е. коррекция осуществляется с точностью флюктуационных составляющих погрешности.
т.е. коррекция осуществляется с точностью флюктуационных составляющих погрешности.
В ИСС 1 по поступившим сигналам  (к=1-6) осуществляется коррекция параметров
(к=1-6) осуществляется коррекция параметров
откуда следует, что с течением времена  т.е. откорректированные значения параметров
т.е. откорректированные значения параметров  стремятся к действительным значениям Aк, что свидетельствует о достижении технического результата.
стремятся к действительным значениям Aк, что свидетельствует о достижении технического результата.
Выходами системы являются первый и второй выходы ИСС 1 и СЦУ 2, сигналы с которых поступают в бортовые взаимодействующие системы индикации и управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 1999 |
|
RU2161777C1 |
| КОМПЛЕКС ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ГРУППОВОГО ВЗАИМОДЕЙСТВИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1999 |
|
RU2152078C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2168704C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ ЗАХОДА НА ПОСАДКУ | 1992 |
|
RU2042923C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ФОРМИРОВАНИЯ СОСТАВЛЯЮЩИХ ПУТЕВОЙ СКОРОСТИ | 2000 |
|
RU2168153C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1998 |
|
RU2146803C1 |
| КОМПЛЕКСНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА НАВИГАЦИИ И НАВЕДЕНИЯ | 1999 |
|
RU2154283C1 |
| СИСТЕМА НАВИГАЦИИ | 2000 |
|
RU2168703C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1999 |
|
RU2139568C1 |
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА | 1996 |
|
RU2089450C1 |
Изобретение относится к авиационному приборостроению и может быть использовано в составе бортового самолетного оборудования, обеспечивающего выполнение задач навигации и целеуказания. Предлагаемый комплекс содержит инерциально-спутниковую систему, связанную с системой целеуказания. Дополнительно введены блок разности, блок задержки, блок выделения погрешностей, блок формирования параметрических функций и блок оптимальной обработки информации. Данные блоки компенсируют погрешности определения навигационных параметров самолета и параметров целеуказания. Изобретение обеспечивает повышение точности работы комплекса и, вследствие этого, - показателей боевой эффективности самолетов, оснащенных предлагаемым комплексом. 1 ил.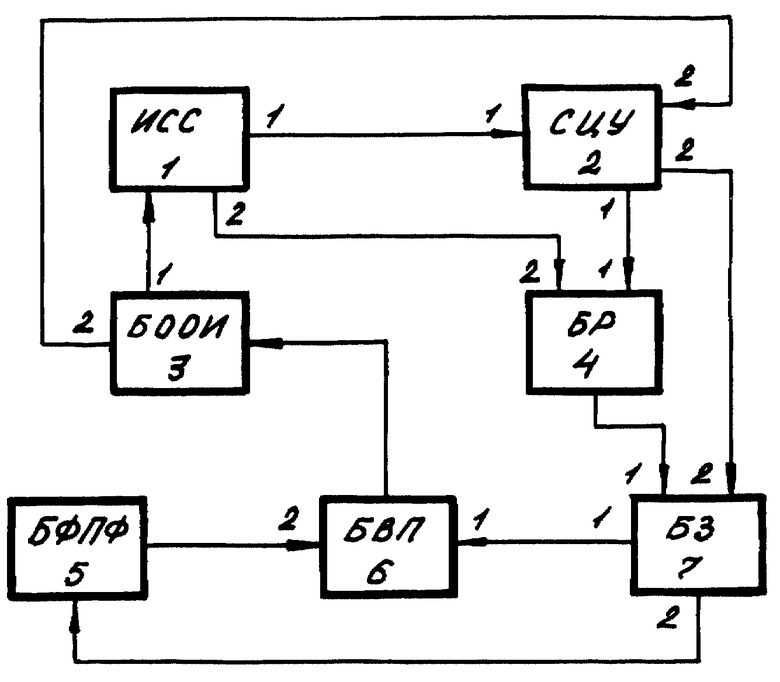
Прицельно-навигационный комплекс, содержащий последовательно соединенные инерциально-спутниковую систему и систему целеуказания, отличающийся тем, что в него дополнительно введены блок формирования параметрических функций и включенные между первым выходом системы целеуказания и входом инерциально-спутниковой системы, последовательно соединенные блок разности, блок задержки, блок выделения погрешностей и блок оптимальной обработки информации, второй выход которого подключен ко второму входу системы целеуказания, второй выход которой подключен ко второму входу блока задержки, второй выход которого подключен ко входу блока формирования параметрических функций, выход которого подключен ко второму входу блока выделения погрешностей, причем на второй вход блока разности подключен второй вход инерциально-спутниковой системы.
| БАБИЧ О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, с.476 - 491 | |||
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 1995 |
|
RU2079109C1 |
| US 5740048 А, 14.04.1998. | |||

