Изобретение относится к области авиационного приборостроения и предназначено для использования в составе бортовых комплексов управления и наведения летательных аппаратов.
Из известных систем навигации наиболее близким аналогом является система, содержащая инерциальный датчик скорости и курса (ИДСК), спутниковый датчик скорости (СДС), блок корректирующих фильтров (БКФ), блок алгебраического суммирования (БАС), описание которой приведено в книге [1] Бабича О. А. "Обработка информации в навигационных комплексах", Москва, Машиностроение, 1991 г., стр. 198 - 225, 476 - 485.
Недостатком системы является наличие погрешности по географическому курсу, при некоторых способах начальной выставки (особенно в полете), достигающей Δ = 1 - 2o.
Задачей изобретения является повышение точности работы системы по географическому курсу.
Достигается это тем, что в систему навигации, содержащую спутниковый датчик скорости и последовательно соединенные инерциальный датчик скорости и курса, блок алгебраического суммирования, первый блок корректирующих фильтров, выход которого подключен ко второму входу блока алгебраического суммирования, на третий вход которого подключен выход спутникового датчика скорости, дополнительно введены, включенные между вторым выходом и четвертым входом блока алгебраического суммирования, последовательно соединенные блок формирования сигнала переключения, блок отключения, второй блок корректирующих фильтров; включенные между вторым выходом блока алгебраического суммирования и входом инерциального датчика скорости и курса последовательно соединенные первый блок моделирующих фильтров и блок формирования погрешности по курсу, на второй вход которого подключен третий выход блока алгебраического суммирования, четвертый выход которого подключен ко второму входу блока отключения, третий вход которого подключен к пятому выходу блока алгебраического суммирования, а также второй блок моделирующих фильтров, включенный между вторым выходом блока отключения и третьим входом блока формирования погрешности по курсу, объединенным с пятым входом блока алгебраического суммирования.
На чертеже представлена блок-схема предлагаемой системы, содержащей:
1 - инерциальный датчик скорости и курса ИДСК,
2 - блок формирования погрешности по курсу БФПК,
3 - первый блок моделирующих фильтров ПБМФ,
4 - второй блок моделирующих фильтров ВБМФ,
5 - спутниковый датчик скорости СДС,
6 - блок алгебраического суммирования БАС,
7 - первый блок корректирующих фильтров ПБКФ,
8 - блок формирования сигнала переключения БФСП,
9 - блок отключения БО,
10 - второй блок корректирующих фильтров ВБКФ.
Связи между блоками выполнены, например, по последовательному коду.
Блоки БФПК 2, БАС 6, БФСП 8 являются стандартными арифметическими операционными устройствами, выполняющими операции суммирования, вычитания, умножения, деления, временного запоминания, передачи сигналов, пример технического выполнения приведен, например, в книге [2] Преснухина Л.Н., Нестерова П. В. "Цифровые вычислительные машины", Москва, Высшая школа, 1981 г. стр. 16.
Блоки ПБМФ 3, ВБМФ 4, ВБКФ 7, ВБКФ 10 выполнены, например, на операционных элементах, реализующих передаточные функции
(здесь P - оператор дифференцирования), пример технического выполнения приведен в книге [3] Тетельбаума И.М., Шнейдера Ю.Р. "400 схем для АВМ", г. Москва, Энергия, 1978 г. стр. 10, стр. 25.
Система работает следующим образом.
Составляющие путевой скорости в географических осях V1c = V1 +  , V2c = V2 +
, V2c = V2 +  (здесь V1, V2 - действительные значения составляющих скорости,
(здесь V1, V2 - действительные значения составляющих скорости,  флюктуационные высокочастотные центрированные погрешности, [1], стр. 477) с выхода СДС 5 поступает на третий вход БАС 6, на первый вход которого с первого выхода ИДСК 1 поступают составляющие путевой скорости в географических осях
флюктуационные высокочастотные центрированные погрешности, [1], стр. 477) с выхода СДС 5 поступает на третий вход БАС 6, на первый вход которого с первого выхода ИДСК 1 поступают составляющие путевой скорости в географических осях
V1и = V1 + Δ1 + V1(-1 + cosΔ) + V2sinΔ;
V2и = V2 + Δ2 + V2(-1 + cosΔ) - V1sinΔ,
где Δ - погрешность по географическому курсу,
Δ1= Σaкtк, Δ2= Σbкtк,
aк, bк - постоянные коэффициенты временного ряда степени "K" (см. книгу [4] , Кузовков Н. Т. , Салычев О.С. "Инерциальная навигация и оптимальная фильтрация", Москва, Машиностроение, 1982 г., стр. 104). На второй вход БАС 6 с выхода ПБКФ 7 поступают корректирующие сигналы х1, х2.
В БАС 6 формируются сигналы: = V1н - х1,
= V1н - х1,  = V2н - х2,
= V2н - х2,
δ1 = V1н - х1 - V1c, δ2 = V2н - X2 - V2с.
Сигналы δ1, δ2 с первого выхода БАС 6 поступают на вход ПБКФ 7, реализующего передаточную функцию r = Z1 / Z2, сигналы δ1 • r, δ2 • r, соответственно при
Z1 = 1 + T1P + T22P2 + ... + Tn-1n-1Pn-1, Z2 = TnnPn,
здесь T1, T2, ..., Tn - постоянные времени)

R = Z1 + Z2 = 1 + T1P + T22P2 + ... + TnnPn,
откуда следует, что при выборе коэффициентов T1, ..., Tn флюктуационные составляющие  подавляются до любого близкого к нулю уровня; при n ≥ K + 1 составляющие
подавляются до любого близкого к нулю уровня; при n ≥ K + 1 составляющие


а при V1 = C0 + C1t + ... + Cmtm, V2 = d0 + d1t + ... + dmtm, n ≥ m + 1,  при Cm = const, dm = const
при Cm = const, dm = const
т.е. после окончания переходного процесса  эти сигналы со второго БАС 6 поступают на вход ПБМФ 3, на вход БФСП 8 и на третий вход БО 9.
эти сигналы со второго БАС 6 поступают на вход ПБМФ 3, на вход БФСП 8 и на третий вход БО 9.
В БФСП 8 по поступившим сигналам  (t),
(t),  (t) формируются сигналы
(t) формируются сигналы  (здесь τ - время задержки), и сигнал
(здесь τ - время задержки), и сигнал
(здесь u0 - постоянная величина).
Сигнал u свидетельствует об изменениях одной или обеих составляющих путевой скорости движения, превышающих пороговый уровень u0.
Сигнал u с выхода БФСП 8 поступает на первый вход БО 9.
С выхода ВБКФ 10 корректирующие сигналы y1, y2 поступают на четвертый вход БАС 6, где формируются сигналы
δ3 = (V1н - y1 - V1с, δ4 = (V2н - y2 - V2с),
которые с четвертого выхода БАС 6 поступают на второй вход БО 9.
БО 9 является стандартным релейным элементом, который при сигнале управления u < 0 подключает второй вход БО 9 к его первому выходу и третий вход к его второму выходу, а при u ≥ 0 по первому выходу БО 9 выдаются сигналы δ3 = 0, δ4 = 0 и по второму выходу выдаются сигналы β1 = 0, β2 = 0.
При u < 0 (полет, близкий к прямолинейному) сигналы δ3, δ4 с четвертого выхода БАС 6 поступают на первый выход БО 9, подключенный ко входу ВБКФ 10, имеющего передаточную функцию
с выхода ВБКФ сигналы
поступают на четвертый вход БАС 6, где, как отмечено, формируются сигналы
δ3 = V1н - y1 - V1с, δ4 = V2н - y2 - V2с,
тогда

В момент времени to при u ≥ 0 (полет с изменениями V1, V2 - разворот, разгон, торможение) с первого выхода БО 9 на вход ВБКФ 10 поступают нулевые сигналы δ3 = 0, δ4 = 0 и на выходе ВБКФ 10 формируются сигналы прогнозирования

где

поступающие на четвертый вход БАС 6, где формируются сигналы

(здесь 
 ),
),
которые с третьего выхода БАС 6 поступают на второй вход БФПК 2.
Со второго выхода БАС 6 сигналы  поступают на вход ПБМФ 3, имеющего передаточную функцию
поступают на вход ПБМФ 3, имеющего передаточную функцию
с выхода ПБМФ 3 сигналы
поступают на первый вход БФПК 2.
С выхода ВБМФ 4 сигналы γ1, γ2 поступают на третий вход БФПК 2 и на пятый вход БАС 6, где формируются сигналы
которые с пятого выхода БАС 6 поступают на третий вход БО 9. При u < 0 на первом входе БО 9, сигналы β1 и β2 с третьего входа БО 9 поступают на второй выход БО 9, подключенный ко входу ВБМФ 4, имеющего передаточную функцию Z1/Z2.
С выхода ВБМФ 4 сигналы
как отмечено выше, поступают на пятый вход БАС 6, где формируются сигналы
соответственно 
При u ≥ 0 в момент t0 на втором выходе БО 9 будут сигналы β1= 0, β2= 0, тогда на выходе ВБМФ 4 формируются сигналы прогнозирования
которые с выхода ВБМФ 4 поступают на третий вход БФПК 2, в котором по поступившим сигналам формируются сигналы
соответственно при малых  который с выхода БФПК 2 поступает на вход ИДСК 1, где формируется сигнал откорректированного географического курса
который с выхода БФПК 2 поступает на вход ИДСК 1, где формируется сигнал откорректированного географического курса
Если  , что на порядок точнее, чем в ближайшем аналоге.
, что на порядок точнее, чем в ближайшем аналоге.
Со второго выхода ИДСК 1 сигнал  выдается потребителям - в бортовые системы индикации, прицеливания, наведения и управления самолетом.
выдается потребителям - в бортовые системы индикации, прицеливания, наведения и управления самолетом.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2168704C1 |
| КОМПЛЕКСНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 1999 |
|
RU2161777C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1998 |
|
RU2146803C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ФОРМИРОВАНИЯ СОСТАВЛЯЮЩИХ ПУТЕВОЙ СКОРОСТИ | 2000 |
|
RU2168153C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1999 |
|
RU2139568C1 |
| КОМПЛЕКСНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА НАВИГАЦИИ И НАВЕДЕНИЯ | 1999 |
|
RU2154283C1 |
| КОМПЛЕКС ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ГРУППОВОГО ВЗАИМОДЕЙСТВИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1999 |
|
RU2152078C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1999 |
|
RU2168154C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2115890C1 |
| МАГНИТНЫЙ КОМПАС | 1997 |
|
RU2126524C1 |
Изобретение относится к авиационному приборостроению и может быть использовано в составе бортового оборудования летательных аппаратов, обеспечивающего их управление и наведение. Предлагаемая система содержит инерциальный датчик скорости и курса, спутниковый датчик скорости, блок алгебраического суммирования и первый блок корректирующих фильтров. Дополнительно введены блок формирования сигнала переключения, блок отключения, второй блок корректирующих фильтров, первый и второй блоки моделирующих фильтров и блок формирования погрешности по курсу. Данным исполнением обеспечивается повышение точности определения географического курса. Как следствие этого, изобретение дает повышение точности управления, наведения и в результате эффективности применения летательных аппаратов, оснащенных предлагаемой системой. 1 ил.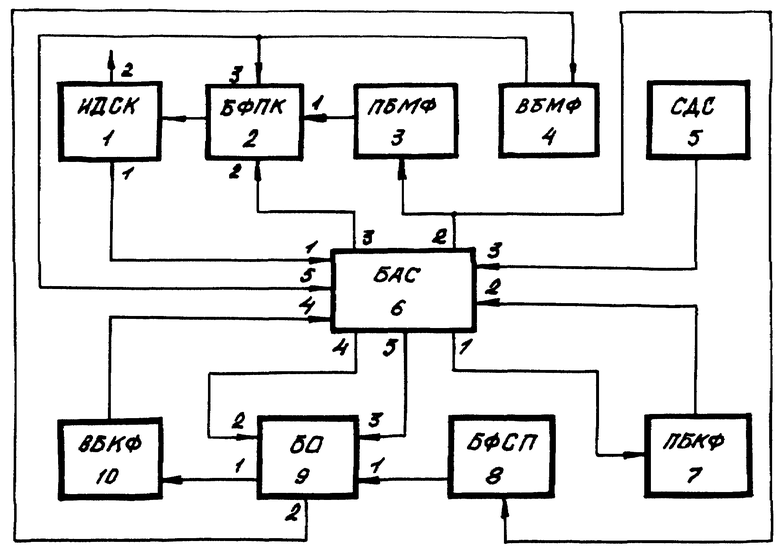
Система навигации, содержащая спутниковый датчик скорости и последовательно соединенные инерциальный датчик скорости и курса, блок алгебраического суммирования, первый блок корректирующих фильтров, выход которого подключен к второму входу блока алгебраического суммирования, на третий вход которого подключен выход спутникового датчика скорости, отличающаяся тем, что в нее дополнительно введены включенные между вторым выходом и четвертым входом блока алгебраического суммирования и последовательно соединенные блок формирования сигнала переключения, блок отключения, второй блок корректирующих фильтров, включенные между вторым выходом блока алгебраического суммирования и входом инерциального датчика скорости и курса и последовательно соединенные первый блок моделирующих фильтров и блок формирования погрешности по курсу, на второй вход которого подключен третий выход блока алгебраического суммирования, четвертый выход которого подключен к второму входу блока отключения, третий вход которого подключен к пятому выходу блока алгебраического суммирования, а также второй блок моделирующих фильтров, включенные между вторым выходом блока отключения и третьим входом блока погрешности по курсу, объединенным с пятым входом блока алгебраического суммирования.
| Бабич О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, с | |||
| Складная решетчатая мачта | 1919 |
|
SU198A1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
| RU 2071034 C1, 27.12.1996 | |||
| US 5740048 A, 14.04.1998. | |||

