Изобретение относится к мобильным грузоподъемным средствам, преимущественно к сельскохозяйственному машиностроению.
Известно транспортное средство с устройствами для самозагрузки и саморазгрузки, содержащее самоходное шасси с кабиной, рама которого выполнена из двух жестко связанных между собой продольных лонжеронов, платформу (кузов), шарнирно закрепленную с возможностью поворота приводом в вертикальной плоскости, колонну, установленную на раме между задней стенкой кабины и передней стенкой платформы с возможностью поворота гидроцилиндром в горизонтальной плоскости, грузоподъемную стрелу, смонтированную на колонне с возможностью поворота в вертикальной плоскости посредством гидроцилиндра, рукоять, на конце которой шарнирно закреплен с возможностью поворота гидроцилиндрами в вертикальной плоскости грузозахватный орган, и гидросистему управления гидроцилиндрами, в котором колонна установлена на определенном расстоянии от передней базы автомобиля, а рама снабжена надрамником, закрепленным на ней с помощью кронштейнов, платформа закреплена на надрамнике и снабжена жестко закрепленной на ней опорой, имеющей кронштейн и фиксирующее устройство для грузозахватного органа, кроме того, для ограничения угла откидывания платформы, транспортное средство снабжено тросом, который одним концом закреплен к надрамнику, а другим к платформе; колонна установлена за кабиной на расстоянии 1/3-1/4 от средней базы автомобиля; фиксирующее устройство для грузозахватного органа выполнено в виде съемного пальца (RU, свидетельство на полезную модель № 16596. U1. МПК7 В60Р 1/48. Транспортное средство с устройствами для самозагрузки и саморазгрузки / A.M.Нечепунов (RU). - Заявка № 2000115879/20; Заявлено 19.06.2000; Опубл. 20.01.2001, Бюл. № 2 // Изобретения. Полезные модели. - 2001. - №2).
К недостаткам описанного средства с манипулятором относится малая зона обслуживания в вертикальной плоскости. Грузозахватный орган не способен захватить и погрузить груз, расположенной ниже плоскости размещения колес шасси.
Наиболее близким аналогом к заявленному объекту относится манипулятор, содержащий плоское основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг оси основания опорно-поворотную колонку со смонтированными шарнирно на ней стрелой, рукоятью и грузозахватным крюком, попарно установленные силовые гидроцилиндры управления стрелой и рукоятью, дополнительные гидроцилиндры механизма поворота опорно-поворотной колонки, в котором колонка выполнена в виде L-образной балки, горизонтальный брус которой ориентирован в сторону проушин попарно установленных силовых гидроцилиндров стрелы, а нижний срез плоского основания снабжен ортогонально установленной дополнительной балкой, удаленный конец которой направлен в сторону кронштейнов навески, при этом удаленные концы горизонтального бруса и дополнительной балки кинематически связаны механизмом поворота колонки, снабженным двуплечим рычагом, ось которого совмещена с вертикальной осью поворота колонки, а его дополнительные гидроцилиндры, штоковые и бесштоковые полости которых перекрестно сообщены гидравлически между собой, установлены разнонаправлено и соединены с ним штоками, причем основание одного из них размещено на горизонтальном брусе L-образной балки, а основание другого - на дополнительной балке плоского основания (патент RU № 2158207 С1, МПК7 В60Р 1/54, А 01 D 90/02. Манипулятор / Н.Г.Кузнецов, A.M.Салдаев, Г.А.Салдаев, А.Ф.Рогачев (RU). - Заявка № 99104419/13; Заявлено 09.03.1999; Опубл. 27.10.2000, Бюл. № 30 // Изобретения. - 2000. - № 30).
К недостаткам описанного манипулятора относятся ограниченная зона обслуживания в вертикальной плоскости и малая производительность.
Сущность заявленного изобретения заключается в следующем.
Задача, на решение которой направлено заявленное изобретение, - увеличение зоны обслуживания.
Технический результат - повышение производительности.
Указанный технический результат достигается тем, что в известном манипуляторе, содержащем плоское основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг оси основания опорно-поворотную колонку на ней стрелой, рукоятью и грузозахватным крюком, попарно установленные силовые гидроцилиндры управления стрелой и рукоятью, дополнительные гидроцилиндры механизма поворота опорно-поворотной колонки, согласно изобретению грузозахватный крюк с концом рукояти связан гибкими подвижными канатами, первый конец первого каната с образованием петли безопасности размещен посредством фиксатора на конце силового гидроцилиндра, основание которого смонтировано в кронштейне на другом конце рукояти, указанная петля безопасности с охватом размещена на силовом гидроцилиндре и ограничивает предельное перемещение штока из полости силового гидроцилиндра, второй конец первого каната и концы последующих канатов, смонтирован посредством оси в кронштейне на конце рукояти, в дугообразной части первого каната, также и последующих канатов, размещен блок с Н-образным кронштейном, на нижней оси указанного кронштейна посредством оси размещен блокиратор первого конца второго каната, а его второй конец аналогичным образом смонтирован в кронштейне на конце рукояти, в дугообразной части второго каната размещен блок с Н-образным кронштейном, в нижней части которого размещена траверса с грузозахватным крюком; второй конец первого каната и концы второго каната и последующих канатов зафиксированы в блокираторе, каждый из которых выполнен в виде призмы с двумя разновеликими параллельными отверстиями, конусом с резьбовым участком, на поверхности которых в диаметральной плоскости выполнены канавки для укладки ветвей каната и фиксируемых на резьбовом участке фасонной гайкой, при этом ветвь фиксируемого конца каната пропущена в параллельном отверстии малого диаметра; фиксатор первого конца первого каната на конце штока силового гидроцилиндра с образованием петли безопасности выполнен в виде двух, внешнего и внутреннего, фасонных резьбовых дисков с осевыми отверстиями, внутренний диск посредством осевого резьбового отверстия смонтирован на конце штока силового гидроцилиндра, в его диаметральной плоскости выполнены пазы для укладки ветвей каната при образовании петли безопасности, а во внутреннюю полость фасонных сопрягаемых дисков фиксируемые ветви введены через осевое отверстие внешнего фасонного резьбового диска; на внешней части внешнего диска выполнен прилив в виде многогранника под размер зева рожкового ключа; на внешней части внутреннего диска выполнена пара отверстий под размер монтажного ключа; петля безопасности на основании силового гидроцилиндра размещена с помощью направляющей; направляющая снабжена упорным полукольцом, парами щек и штифтов; силовой гидроцилиндр и петля безопасности на рукояти зафиксированы транспортным кронштейном; блоки на конце рукояти, на первом, втором и последующих канатах выполнены равновеликими и идентичными по конструкции.
Изобретение поясняется чертежами.
На фиг.1 схематично изображен манипулятор в рабочем положении, вид сбоку.
На фиг.2 показана рукоять заявленного манипулятора с силовым гидроцилиндром для перемещения канатов и блоков на них.
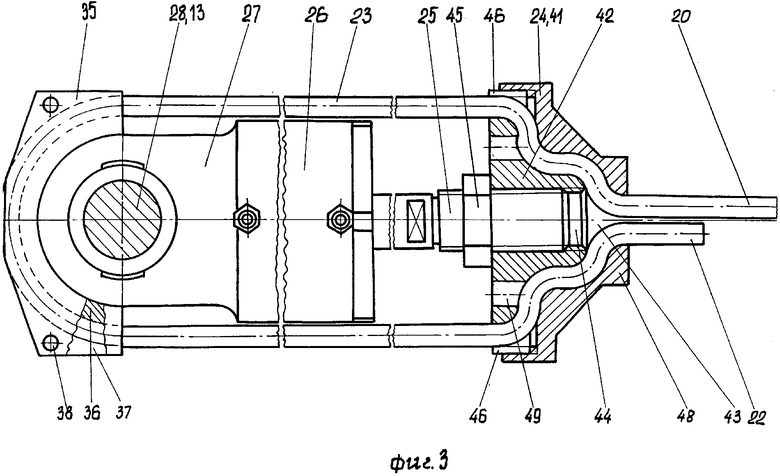
На фиг.3 представлен силовой гидроцилиндр с фиксатором концов каната и петлей безопасности силового гидроцилиндра, вид сбоку.
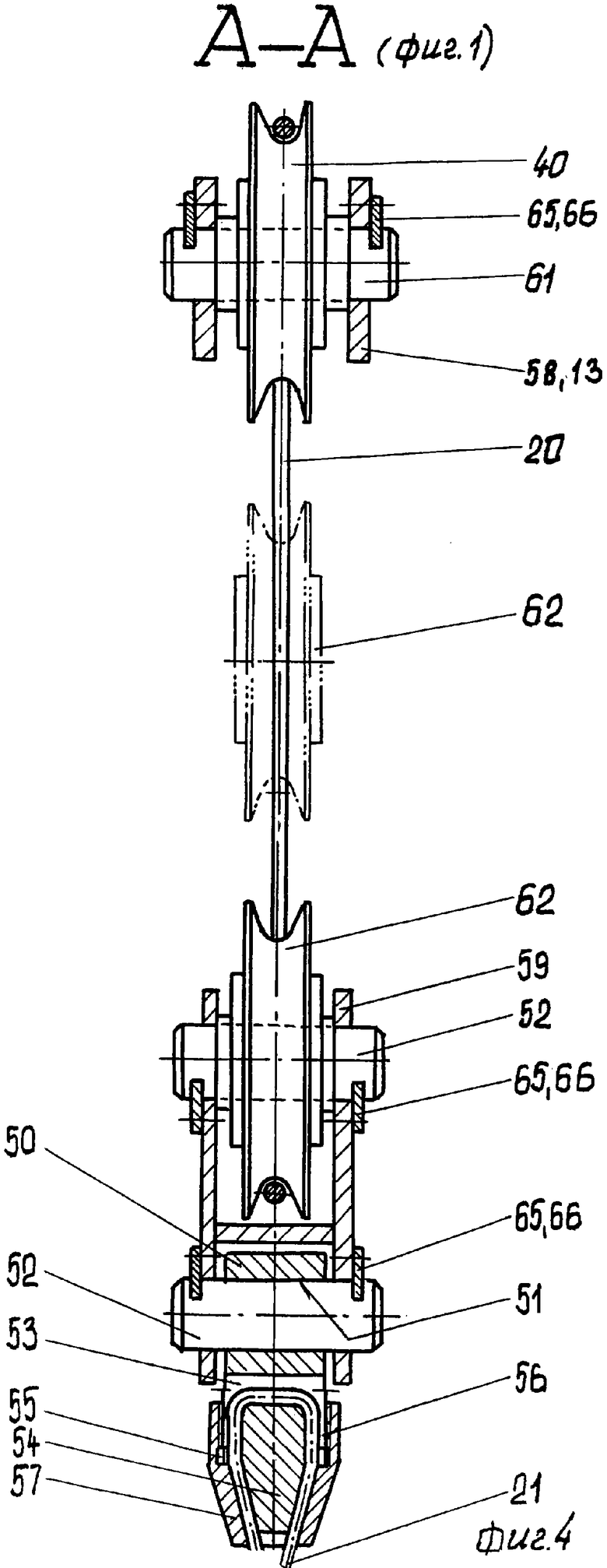
На фиг.4 - сечение А-А на фиг.1, поперечно-вертикальный разрез пары блоков: неподвижного на конце рукояти и подвижного на нижней части первого каната с зафиксированным концом в кронштейне первого подвижного блока.
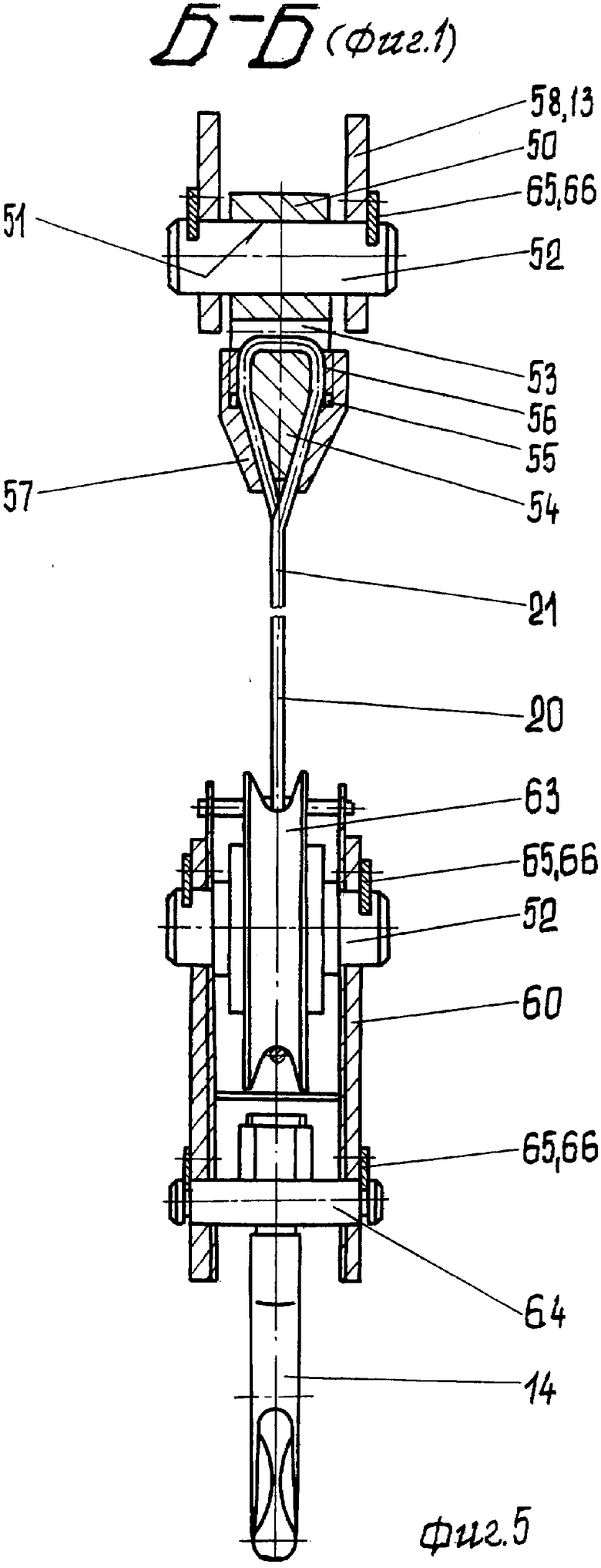
На фиг.5 - сечение Б-Б на фиг.1, поперечно-вертикальный разрез Н-образного кронштейна с подвижным блоком второго каната и траверсы с грузозахватным крюком в его нижней части и фиксатором второго конца первого каната.
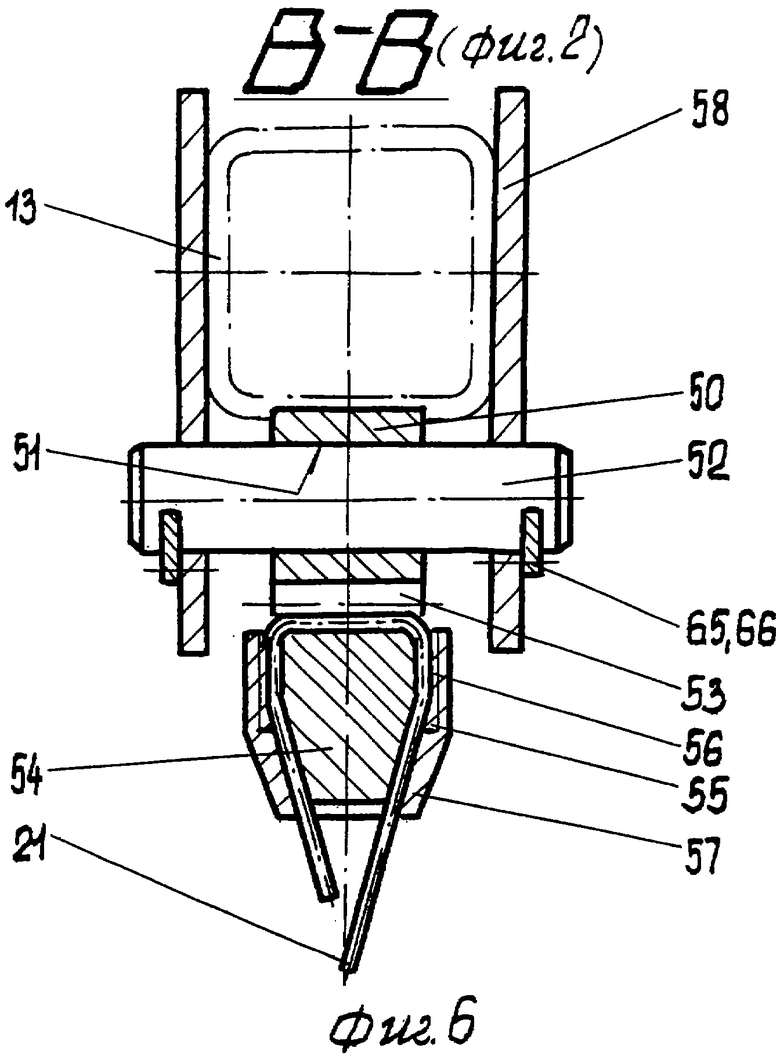
На фиг.6 - сечение В-В на фиг.2, соединение фиксатора второго конца второго каната с кронштейном рукояти.
На фиг.7 - сечение Г-Г на фиг.2, поперечное сечение рукояти, силового гидроцилиндра, ветвей каната петли безопасности и транспортного кронштейна.
На фиг.8 представлено положение рукояти и стрелы заявленного манипулятора при выполнении монтажных работ на большой глубине, например на дне полнопрофильного магистрального канала при выполнении реставрационных работ.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключаются в следующем.
Манипулятор (см. фиг.1 и 8) содержит плоское основание 1 с кронштейнами навески 2 и 3 и выдвижными левой и правой опорами 4. Плоское основание 1 посредством кронштейнов навески 2 и 3 и тяг 5 и 6 шарнирно связано с рамой трактора 7. Силовым гидроцилиндром 8 через тяги 5 и 6 гидронавесной системы трактора 7 производится подъем плоского основания 1 в транспортное положение. Опорно-поворотная колонка 9 закреплена с возможностью поворота вокруг осей 10 и 11 основания 1. На опорно-поворотной колонке 9 смонтированы шарнирно стрела 12, рукоять 13 и грузозахватный крюк 14. Дистанционное управление стрелой 12 и рукоятью 13 производится попарно установленными силовыми гидроцилиндрами 15 и 16. Основание 1 и опорно-поворотная колонка 9 шарнирно связаны дополнительными гидроцилиндрами 17 и 18 механизма поворота 19 опорно-поворотной колонки 9.
Грузозахватный крюк 14 с концом рукояти 13 связан последовательно установленными гибкими подвижными канатами 20 и 21. Количество канатов 20 (21) на конце рукояти 13 может быть и более двух и зависит от конкретной решаемой задачи - величины зоны обслуживания в вертикальной плоскости. Первый конец 22 первого каната 20 с образованием петли безопасности 23 размещен посредством фиксатора 24 на конце штока 25 силового гидроцилиндра 26. Основание 27 силового гидроцилиндра 26 (см. фиг.2) посредством оси 28 и кронштейнов 29 размещено на заднем конце рукояти 13. Этим же кронштейном 29 и осью 30 рукоять 13 шарнирно соединены с концом стрелы 12. Шток силового гидроцилиндра 16 осью 31 размещен в кронштейне 32 рукояти 13. Положения осей 28, 30 и 31 в кронштейнах 29 и 32 зафиксировано планками 33 и средствами крепления 34. Основание 27 силового гидроцилиндра 26 на оси 28 смонтировано посредством сферического шарнира (см. фиг.3).
Указанная петля 23 безопасности с охватом размещена на силовом гидроцилиндре 26. Петля 23 безопасности ограничивает предельное перемещение штока 25 из полости силового гидроцилиндра 26 при аварийных ситуациях.
Петля 23 безопасности на основании 27 силового гидроцилиндра 26 размещена с помощью направляющей 35. Направляющая 35 снабжена упорным полукольцом 36, парами щек 37 и штифтов 38 (см. фиг.3). На упорном полукольце 36 уложен криволинейный участок каната 20 петли 23 безопасности. Левая и правая щеки 37 направляют ветвь каната 20 при предельном перемещении штока 25 силового гидроцилиндра 26 в канавку на поверхности упорного полукольца 36. Штифты 38 исключают самопроизвольное выскальзывание ветви каната 20 из направляющей 35.
Петля 23 безопасности и силовой гидроцилиндр 26 (см. фиг.2 и 7) на рукояти 13 зафиксированы транспортным кронштейном 39. Им обеспечивается строгая подача каната 20 на блок 40.
Фиксатор 24 первого конца 22 первого каната 20, размещенного на конце штока 25 силового гидроцилиндра 26 с образованием петли 23 безопасности, выполнен в виде двух, внешнего и внутреннего, фасонных резьбовых дисков 41 и 42 с осевыми отверстиями 43 и 44 (см. фиг.3). Внутренний диск 42 посредством осевого резьбового отверстия 44 смонтирован на резьбовом конце штока 25 силового гидроцилиндра 26 и зафиксирован контргайкой 45 (см. фиг.2 и 3). В диаметральной плоскости внутреннего диска 42 на цилиндрической резьбовой части выполнены пазы 46 для укладки ветвей каната 20 при образовании петли 23 безопасности. Во внутреннюю полость фасонных сопрягаемых дисков 41 и 42 фиксируемые ветви каната 20 введены и выведены через осевое отверстие 43 внешнего фасонного резьбового диска 41. На внешней части внешнего диска 41 выполнен прилив 47 в виде многогранника 48 под размер зева рожкового ключа для сборки фиксатора 24. На внешней торцевой части внутреннего диска 42 параллельно осевому резьбовому отверстию 44 выполнена пара цилиндрических отверстий 49 под размер монтажного ключа.
Второй конец первого каната 20 размещен в блокираторе 50. Аналогичным образом концы второго каната 21 и последующих канатов зафиксированы в блокираторах 50. Каждый блокиратор 50 выполнен в виде призмы с двумя разновеликими параллельными отверстиями: верхнее отверстие 51 под размер оси 52; нижнее отверстие 53 для запасовки концов каната 20 или 21. В нижней части призмы выполнен конус 54, сопряженный с призмой резьбовым участком 55. На поверхности конуса 54 и резьбового участка 55 в диаметральной плоскости выполнены канавки 56 для укладки ветвей каната 20 (21). Ветви каната 20 (21) в диаметральных канавках 56 фиксируют фасонной гайкой 57, навинченной на резьбовой участок 55 призмы. Таким образом, ветвь каната 20 (21) с его концами, пропущенная в нижнем параллельном отверстии 53, зафиксирована с возможностью перепасовки в блокираторе 50.
Блокиратор 50 посредством оси 52 смонтирован либо в кронштейне 58 на конце рукояти 13, либо в кронштейне 59, размещенной на свисающей дугообразной части первого каната 20, либо в кронштейне 60 на свисающей дугообразной части второго каната 21.
Блок 40 размещен посредством оси 61 в кронштейне 58 на конце рукояти 13. Блок 62 размещен в Н-образном кронштейне 59. Канат 20 с охватом размещен на блоках 40 и 62. Концы каната 20 зафиксированы на фиксаторе 24 и блокираторе 50.
Блок 62 размещен в Н-образном кронштейне 59. На нижней части указанного кронштейна 59 посредством оси 52 размещен блокиратор 50 первого конца второго каната 21. Его второй конец каната 21 аналогичным образом смонтирован в кронштейне 58 на конце рукояти 13. В дугообразной части второго каната 21 размещен третий блок 63 со вторым Н-образным кронштейном 60. В нижней части Н-образного кронштейна 60 размещена траверса 64 с грузозахватным крюком 14. Блоки 40, 62 и 63 на конце рукояти 13, размещенные на первом и втором канатах 20 и 21, выполнены равновеликими и идентичными по конструкции. Блокираторы 50 и блоки 40, 62, 63 размещены на равновеликих осях 52 и зафиксированы в кронштейнах 58, 59 и 60 планками 65 со средствами крепления 66.
Манипулятор работает следующим образом.
После приведения плоского основания 1 и левых и правых опор 4 в рабочее положение верхней тягой 5 гидронавесной системы трактора 7 оси 10 и 11 выставляют вертикально. Затем силовой гидроцилиндр 8 гидронавесной системы трактора 7 переводят гидрозолотником в положение «Заперто». Таким образом тягами 5 и 6 через кронштейны 2 и 3 плоское основание 1 блокирует на раме трактора 7. Далее гидроцилиндрами 15 и 16 проверяют работу стрелы 12 с рукоятью 13. Механизм 19 поворота, управляемого силовыми гидроцилиндрами 17 и 18, проверяют угловые перемещения опорно-поворотной колонки 9 на осях 10 и 11.
При подаче масла в бесштоковую полость силового гидроцилиндра 26, его шток 25 перемещается в направлении оси 61 в кронштейне 58, размещенного на конце рукояти 13. Фиксатор 24 конца 22 каната 20 приближается к блоку 40 на конце рукояти 13. Блок 40 вращается на оси 61, а канат 20 перекатывается на блоке 40 и опускается вниз.
Другой конец каната 20 размещен на оси 52 посредством блокиратора 50. При неподвижном положении рукояти 13 и сбегании ветви каната 20 с блока 40, его нижняя часть вместе с блоком 62 смещаются вертикально вниз, например в сторону дна котлована или данной части полнопрофильного магистрального канала (см. фиг.8). При ходе штока 25 силового гидроцилиндра 26, равном, например, 1000 мм ±10 мм, ось 52 вместе с блоком 62 в кронштейне 62 переместились вниз на 2000 мм, т.е. в два раза большую глубину. При перемещении Н-образного кронштейна 59 его нижняя ось синхронно опускаются вниз вместе с блокиратором 50 и первым концом второго каната 21. Второй конец второго каната 21 блокиратором 50 и осью 52 находятся в состоянии покоя в кронштейне 58 на конце рукояти 13.
Перемещение каната 21 с блокиратором 50 в кронштейне 59 приводит к тому, что блок 63 на оси 52 вместе с кронштейном 60 опускаются строго вертикально вниз вместе с грузозахватным крюком. При ходе штока 25 силового гидроцилиндра 26, равном 1000 мм, грузозахватный крюк 14 опустился на 4000 мм вниз. При решении других задач количество блоков 62 и 63 на конце рукояти 13 и количество канатов 20 и 21 увеличивают.
Описанная конструкция крепления грузозахватного крюка 14 посредством блоков 40, 62 и 63 позволяет до 4 раз превысить усилие подъема на крюке 14 по сравнению с усилием, развиваемым на штоке силового гидроцилиндра 26. В то же время скорость подъема груза на крюке 14 в 4 раза больше скорости перемещения штока 25.
Таким образом описанная конструкция рукояти 13 с блоками 40, 62 и 63 и двумя канатами 20 и 21 обеспечивает повышение производительности манипулятора и зону обслуживания в вертикальной плоскости.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 2006 |
|
RU2305637C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305636C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305638C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158708C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168456C1 |



Изобретение относится к грузоподъемной технике, преимущественно к сельскохозяйственному машиностроению. Манипулятор содержит плоское основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг оси основания опорно-поворотную колонку со смонтированными шарнирно на ней стрелой, рукоятью и грузозахватным крюком, попарно установленные силовые гидроцилиндры управления стрелой и рукоятью, дополнительные гидроцилиндры механизма поворота опорно-поворотной колонки. Грузозахватный крюк с концом рукояти связан гибкими подвижными канатами. Первый конец первого каната с образованием петли безопасности размещен посредством фиксатора на конце штока силового гидроцилиндра, основание которого смонтировано в кронштейне на другом конце рукояти. Указанная петля безопасности с охватом размещена на силовом гидроцилиндре и ограничивает предельное перемещение штока из полости силового гидроцилиндра. Второй конец первого каната, размещенный в блокираторе, смонтирован посредством оси в кронштейне на конце рукояти. В дугообразной части первого каната размещен блок с Н-образным кронштейном, на нижней оси которого посредством оси размещен блокиратор первого конца второго каната, а его второй конец аналогичным образом смонтирован на конце рукояти. В дугообразной части второго каната размещен блок с Н-образным кронштейном, в нижней части которого размещена траверса с грузозахватным крюком. Достигается повышение производительности. 8 з.п. ф-лы, 8 ил.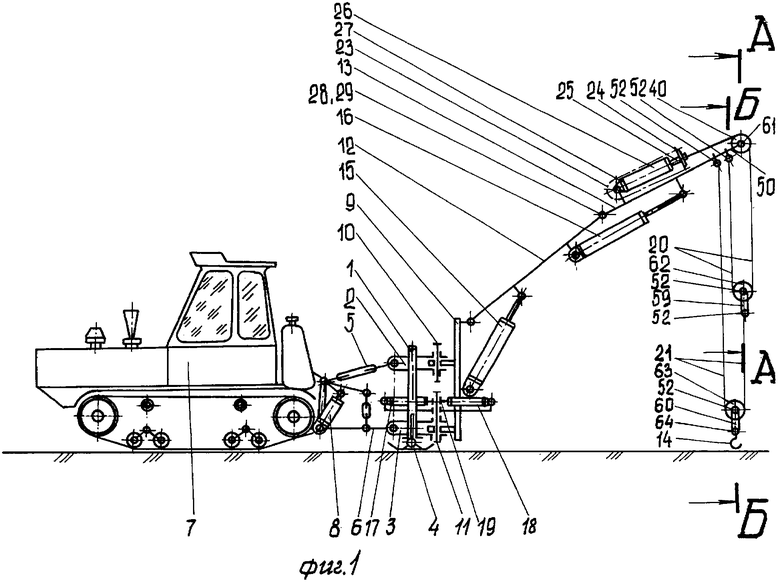
| МАНИПУЛЯТОР | 1999 |
|
RU2158207C1 |
| Подъемный кран с пневматическим приводом | 1951 |
|
SU95688A1 |
| WO 8504386 А1, 10.10.1985 | |||
| JP 11123978 А, 11.05.1999. | |||

