Изобретение относится к области магнитных измерений, в частности к способам ориентации квантовых самогенерирующих магнитометров относительно вектора магнитной индукции.
Известен способ ориентации квантовых самогенерирующих магнитометров (КСМ), реализованный в устройстве по патенту США N 4600886 G 01 R 33/08, приоритет 11 марта 1983 г. В этом способе ось КСМ наклоняют в плоскости магнитного меридиана в такое положение, при котором ось КСМ ориентирована под углом 45o к вектору магнитной индукции и в процессе магнитных измерений при изменении маршрута разворачивают КСМ по курсу таким образом, чтобы ось КСМ находилась в плоскости магнитного меридиана.
Недостаток этого способа состоит в том, что даже при небольших углах наклона по крену и тангажу ось КСМ отклоняется от заданного углового положения (45o) относительно вектора магнитной индукции и возникают ориентационные погрешности измерений. Дополнительные погрешности возникают за счет того, что в процессе магнитных измерений в движении угол магнитного наклонения не контролируется и наклон оси КСМ не корректируется.
Известен также способ ориентации КСМ, реализованный магнитометром ММ-305 (сборник "Геофизическая аппаратура", вып. 69. - Л.: Недра, 1979, с. 3-4).
Этот способ, принятый в качестве прототипа, включает следующие операции:
- измерение модуля B вектора магнитной индукции;
- одновременное измерение проекции B1 вектора магнитной индукции на ось КСМ компонентным магнитометром (КМ), ориентированным параллельно оси КСМ;
- формирование сигнала рассогласования ΔB1 = B1 - Bcosγ, где γ = 45-50o - заданное значение угла между вектором магнитной индукции и осью КСМ;
- вращение КСМ и КМ до нулевого значения сигнала рассогласования.
Способ обеспечивает заданную ориентацию как при разворотах по курсу, так и в процессе эволюций по углам крена и тангажа при различных значениях угла магнитного наклонения.
Недостаток способа-прототипа состоит в ограниченном диапазоне эволюций по углам крена и тангажа. Он не обеспечивает ориентацию КСМ при размещении на искусственных спутниках Земли и других высокоманевренных летательных аппаратах, совершающих угловые эволюции в широком диапазоне углов и угловых скоростей. Недостатком способа также является необходимость регулировки угла α между осью КСМ и осью вращения в зависимости от угла магнитного наклонения.
Задача, на решение которой направлено данное изобретение, состоит в создании способа ориентации КСМ, обеспечивающего ориентацию при размещении на маневренных летательных аппаратах и исключающего необходимость регулировки угла α в зависимости от угла магнитного наклонения.
Предлагаемое изобретение решает эту задачу следующим образом.
Способ включает в себя:
- измерение модуля B вектора магнитной индукции;
- одновременное измерение проекции B1 вектора магнитной индукции на ось КСМ компонентным магнитометром (КМ), ориентированным параллельно оси КСМ;
- формирование сигнала рассогласования ΔB1 = B1 - Bcosγ, где α = 45-50o - заданное значение угла между вектором магнитной индукции и осью КСМ;
- вращение КСМ и КМ до нулевого значения сигнала рассогласования.
Отличие способа состоит в том, что оси КСМ и КМ располагают под углом γ = 45o к оси вращения, дополнительно измеряют проекцию Bn вектора магнитной индукции на ось вращения вторым КМ, расположенным параллельно оси вращения, при снижении значения Bn ниже уровня Bcos (45o+γ) изменяют полярность радиочастотной обратной связи и одновременно формируют сигнал рассогласования Δ B1 = B1 + Bcosγ, а при последующем увеличении значения Bn выше уровня - Bcos(45o+γ) устанавливают первоначальную полярность и формируют первоначальный сигнал рассогласования, обеспечивая, тем самым, заданную ориентацию КСМ во всем возможном диапазоне углов между вектором  и осью вращения.
и осью вращения.
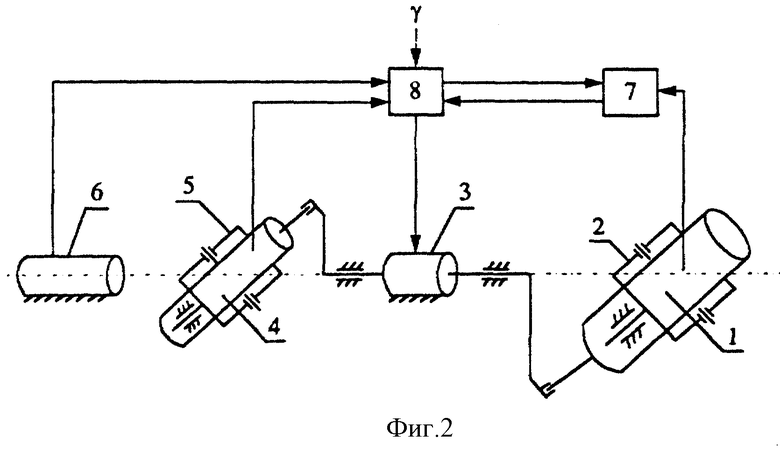
Сущность изобретения поясняется чертежами, где на фиг. 1 приведена диаграмма, поясняющая положение оси КСМ относительно оси вращения и относительно вектора магнитной индукции, на фиг. 2 приведена функциональная схема одного из возможных вариантов устройства для реализации способа.
Вектор  магнитной индукции (фиг. 1) расположен под углом β к оси вращения КСМ.
магнитной индукции (фиг. 1) расположен под углом β к оси вращения КСМ.
Положение оси КСМ показано единичным вектором  , проведенным из центра O КСМ под углом α= 45o к оси вращения. В процессе вращения ось КСМ, направленная по образующей кругового конуса с углом при его вершине, равным 90o, скользит по поверхности конуса и при этом изменяется угол γ между вектором индукции и вектором
, проведенным из центра O КСМ под углом α= 45o к оси вращения. В процессе вращения ось КСМ, направленная по образующей кругового конуса с углом при его вершине, равным 90o, скользит по поверхности конуса и при этом изменяется угол γ между вектором индукции и вектором  . Оптимальная ориентация соответствует такому значению угла γ, при котором достигается максимальное отношение сигнала к шумам.
. Оптимальная ориентация соответствует такому значению угла γ, при котором достигается максимальное отношение сигнала к шумам.
У КСМ значение оптимального угла γ равно 45o, причем отношение сигнала к шумам сохраняется практически приемлемым в пределах γ=45-50o.
При значениях угла β между вектором магнитной индукции и осью вращения КСМ в пределах 0o≅ β ≅ 90o, можно найти такое положение вектора  на поверхности конуса, при котором достигается заданное значение угла γ=45o. Если же угол между вектором магнитной индукции осью вращения превышает 90o (90o≅ β ≅180o), то, независимо от угла поворота, угол γ превышает 45o и ориентация не обеспечивается. В этом случае следует изменить полярность радиочастотной обратной связи и, вращая КСМ, установить его ось под углом 45o к вектору
на поверхности конуса, при котором достигается заданное значение угла γ=45o. Если же угол между вектором магнитной индукции осью вращения превышает 90o (90o≅ β ≅180o), то, независимо от угла поворота, угол γ превышает 45o и ориентация не обеспечивается. В этом случае следует изменить полярность радиочастотной обратной связи и, вращая КСМ, установить его ось под углом 45o к вектору  .
.
Это становится возможным благодаря тому, что изменение полярности радиочастотной обработанной связи эквивалентно изменению направления оси КСМ на противоположное, за счет чего в процессе вращения ось КСМ скользит по другой поверхности, симметричной относительно поверхности конуса, изображенной на фиг. 1.
В тех случаях, когда изменения выполняются при значениях угла β, близких 90o, возможно многократное переключение полярности с потерей информации.
Этих потерь можно избежать, установив программное значение угла γ>45o вплоть до значения γ = 50o, что практически не окажет существенного влияния на отношение сигнала к шумам.
Устройство для реализации предлагаемого способа (фиг. 2) содержит КСМ 1, установленный в первом кардановом подвесе 2 и соединенный с исполнительным механизмом вращения 3 так, что его ось расположена под углом 45o к оси вращения.
Первый КМ 4 установлен во втором кардановом подвесе 5 и соединен с исполнительным механизмом вращения 3 так, что его ось также ориентирована под углом 45o к оси вращения и в процессе вращения остается параллельна оси КСМ 1. Второй КМ 6 установлен параллельно оси вращения. Выход КСМ 1 соединен с измерительно-регистрирующим блоком 7, выход которого соединен с первым входом блока управления 8, ко второму и третьему входам которого подключены выходы первого КМ 4 и второго КМ 6. Первый выход блока 8 соединен с управляющим входом исполнительного механизма вращения 3. Второй выход блока управления 8 соединен с управляющим входом блока 7, переключающего полярность катушки радиочастотной обратной связи. Катушка радиочастотной обратной связи расположена в КСМ 1 и на схеме не показана.
Устройство работает следующим образом:
КСМ 1 преобразует магнитную индукцию в переменное напряжение, частота которого пропорциональна значению модуля В вектора магнитной индукции. В измерительно-регистрирующем блоке 7 сигнал с выхода КСМ преобразуется в электрический сигнал в виде кода, поступающий на первый вход блока 8. Первый КМ 4 преобразует компоненту B1 магнитной индукции в электрический сигнал в виде кода, поступающий на второй вход блока 8. Второй КМ 6 преобразует компоненту Bn магнитной индукции в электрический сигнал в виде кода, поступающий на третий вход блока 8.
Блок управления 8 выполнен в виде программируемой микроЭВМ. По сигналам, поступившим на первый и второй входы блока 8, в соответствии с программой, записанной в его память, формируется код сигнала рассогласования на основе зависимости ΔB1 = B1 - Bcosγ. Значение угла γ между вектором магнитной индукции и осью КСМ также записано в память блока 8 и может корректироваться оператором магнитометра в пределах от 45o до 50o. Значение кода сигнала рассогласования преобразуется в напряжение и с первого выхода блока 8 поступает на управляющий вход исполнительного механизма 3, вращающего КСМ 1 и KM 4, расположенные под углом α = 45o к оси вращения. В процессе вращения изменяется проекция B1 вектора магнитной индукции на ось КСМ. При достижении значения B1 = Bcosγ сигнал рассогласования становится равен нулю, вращение прекращается и оси КСМ 1 и КМ 4 останавливаются под углом γ к вектору магнитной индукции. При последующем движении под влиянием угловых эволюций и изменения вектора магнитной индукции вновь появляется сигнал рассогласования и исполнительный механизм 3 удерживает заданное значение угла γ.
Одновременно в блоке 8 по сигналам, поступающим на его первый и третий входы, значение Bn сравнивается со значением Bcos (45o+γ). При снижении уровня Bn ниже значения Bcos (45+γ ) по программе, записанной в память блока 8, со второго выхода блока 8 на управляющий вход блока 7 подается сигнал на переключение полярности катушки радиочастотной обратной связи. Полярность катушки переключается и одновременно изменяется сигнал рассогласования в соответствии с зависимостью ΔB1 = B1+Bcosγ.
В результате переключения катушки радиочастотной обратной связи и обработки сигнала рассогласования устанавливается новое положение оси КСМ, при котором B1 = Bcosγ имеет противоположный знак, соответствующий заданному углу γ. Во время разворота происходит кратковременное пропадание сигнала КСМ с последующим его восстановлением после завершения разворота.
В новом рабочем положении значение Bn сравнивается со значением - Bcos (45o+γ). При повышении уровня Bn выше значения - Bcos (45o+γ) осуществляется обратное переключение катушки радиочастотной связи и сигнал рассогласования рассчитывается на основе первоначальной зависимости.
Благодаря введению новой операции - измерения проекции Bn вектора магнитной индукции на ось вращения и реализации с учетом измеренных значений Bn второго режима ориентации, становится возможной ориентация КСМ при любых значениях угла β между вектором магнитной индукции и осью КСМ. Исключаются ограничения на угловые эволюции. КСМ может устанавливаться на искусственных спутниках Земли и высокоманевренных летательных аппаратах с широким диапазоном угловых эволюций и угловых скоростей.
Возможны различные варианты устройства для реализации способа:
- с однокамерными КСМ;
- с двухкамерными КСМ по схеме Арнольда (патент Франции N 1303758 от 13.10.61);
- с горизонтальным или вертикальным положением оси вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2040803C1 |
| ФЕРРОЗОНДОВЫЙ АЭРОМАГНИТОМЕТР | 1991 |
|
RU2019860C1 |
| СПОСОБ МАГНИТНЫХ ИЗМЕРЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2019859C1 |
| ТРЕХКОМПОНЕНТНЫЙ ОПТИЧЕСКИЙ КВАНТОВЫЙ МАГНИТОМЕТР НА АЗОТНО-ВАКАНСИОННЫХ ЦЕНТРАХ ОКРАСКИ В КРИСТАЛЛЕ АЛМАЗА | 2024 |
|
RU2835005C1 |
| Способ измерения геомагнитного поля на движущихся и вращающихся носителях | 2024 |
|
RU2825539C1 |
| Способ измерения компонент магнитного поля | 2020 |
|
RU2737726C1 |
| Квантовый датчик и способы для измерения поперечной компоненты слабого магнитного поля (варианты) | 2020 |
|
RU2733701C1 |
| СПОСОБ ОРИЕНТАЦИИ И СИСТЕМА ОРИЕНТАЦИИ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1999 |
|
RU2150412C1 |
| Устройство для измерения амплитуды переменного магнитного поля | 1978 |
|
SU781724A1 |
| "Ориентируемый квантовый магнитометр | 1975 |
|
SU851303A1 |
Использование: для ориентации летательных аппаратов. Способ включает одновременно измерение модуля В вектора магнитной индукции, проекции В1 вектора магнитной индукции на ось квантового самогенерирующего магнетометра (КСМ) компонентным магнитометром (КМ), ориентированным параллельно оси КСМ, формирование сигнала рассогласования ΔВ1=В1-Вcosγ, где γ=45-50o - заданное значение угла между вектором магнитной индукции и осью КСМ, вращение КСМ и КМ вокруг оси, расположенной под углом α=45o к оси КСМ, до нулевого значения угла рассогласования, дополнительное измерение проекции Вn вектора магнитной индукции на направление оси вращения с помощью второго КМ, ориентированного параллельно оси вращения, изменение полярности радиочастотной связи при снижении значения Вn ниже уровня Вcos(45o+γ) с одновременным изменением сигнала рассогласования ΔВ1=В1+Вcosγ и восстановление первоначальных полярности и сигнала рассогласования при последующем увеличении значения Вn выше уровня - Вcos(45o+γ). Технический результат заключается в обеспечении ориентации КСМ при размещении на высокоманевренных летательных аппаратах и исключает необходимость регулировки угла α в зависимости от угла магнитного наклонения. 2 ил.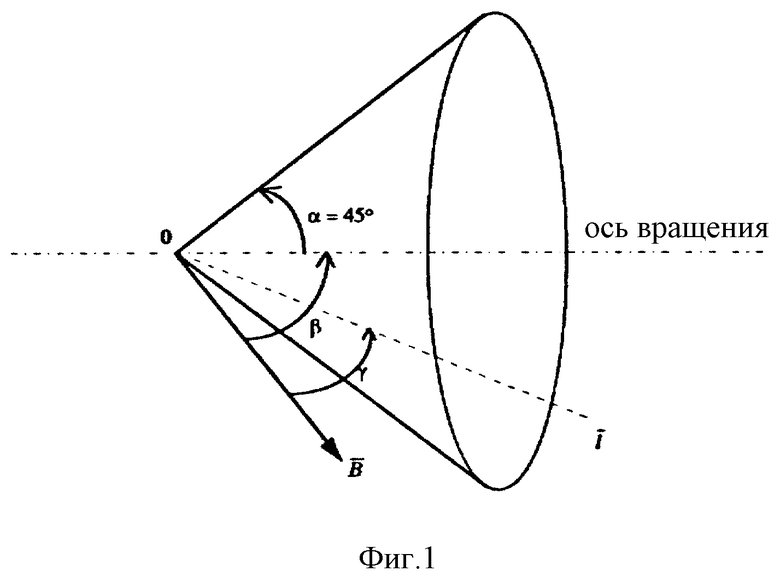
Способ ориентации квантового самогенерирующего магнитометра, включающий измерение модуля B вектора магнитной индукции, одновременное измерение проекции B1 вектора магнитной индукции на ось квантового самогенерирующего магнитометра компонентным магнитометром, ориентированным параллельно оси квантового самогенерирующего магнитометра, формирование сигнала рассогласования ΔB1 = B1 - Bcosγ, где γ = 45 - 50o - заданное значение угла между вектором магнитной индукции и осью квантового самогенерирующего магнитометра, вращение квантового самогенерирующего магнитометра и компонентного магнитометра до нулевого значения сигнала рассогласования, отличающийся тем, что оси квантового самогенерирующего магнитометра и компонентного магнитометра располагают под углом α = 45o к оси вращения, дополнительно измеряют проекцию Bn вектора магнитной индукции на направление оси вращения вторым компонентным магнитометром, расположенным параллельно оси вращения, при снижении значения Bn ниже уровня Bcos(45o + γ) изменяют полярность радиочастотной обратной связи и одновременно формируют сигнал рассогласования ΔB1 = B1 + Bcosγ, а при последующем увеличении значения Bn выше уровня - Bcos(45o + γ) устанавливают ее первоначальную полярность и формируют первоначальный сигнал рассогласования.
| Геофизическая аппаратура, Вып | |||
| Способ приготовления пищевого продукта сливкообразной консистенции | 1917 |
|
SU69A1 |
| - Л.: Недра, 1979, с | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| СПОСОБ МАГНИТНЫХ ИЗМЕРЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2019859C1 |
| СПОСОБ ДИАГНОСТИКИ СИЛОВЫХ ТРАНСФОРМАТОРОВ | 1993 |
|
RU2069371C1 |
| US 4600886 A, 15.07.1986. | |||

