Изобретение относится к области навигации и может быть использовано в навигационных комплексах летательных аппаратов, преимущественно многоцелевых истребителей и вертолетов.
Известно устройство коррекции инерциальной спутниковой навигационной системы по показаниям спутниковой навигационной системы, содержащее спутниковую навигационную систему, инерциальную навигационную систему и блок сравнения их выходных сигналов по трем координатам места и трем составляющим вектора линейной скорости подвижного объекта, отличающееся тем, что в него введены последовательно соединенные блок памяти, блок определения угловых погрешностей, блок определения уходов гироскопов, а также командно-временный блок, при этом первый и второй входы блока памяти связаны соответственно с выходами блока инерциальной навигационной системы и блока сравнения, а первый и второй выходы блока памяти связаны соответственно с первым входом блока инерциальной навигационной системы и с первым входом блока оценки угловых погрешностей, выход блока оценки угловых погрешностей связан с вторым входом инерциальной навигационной системы и с первым входом блока оценки уходов гироскопов, блок оценки уходов гироскопов связан с третьим входом инерциальной навигационной системы, выход командно-временного блока связан с четвертым входом инерциально-навигационной системы, третьим входом блока сравнения и вторыми входами блока оценки уходов гироскопов и блока оценки угловых параметров [1].
Известна комплексная навигационная система, содержащая инерциальную навигационную систему (ИНС), спутниковую навигационную систему (СНС), пульт управления и ввода (ПУВ) и бортовую цифровую вычислительную машину (БЦВМ), отличающаяся тем, что в ее состав дополнительно введен инерциальный измерительный блок (ИИБ), связанный с входом-выходом БЦВМ [2]. Комплексная навигационная система [2] отличается также тем, что в ее состав дополнительно введены устройство запоминания погрешностей ИНС (УЗ-ИНС), связанное по входу с ПУВ, устройство компенсации погрешностей ИНС (УК-ИНС), связанное по входам с ИНС и УЗ-ИНС и устройство преобразования сигналов ИНС, связанное по входам с ИНС, УЗ-ИНС и УК-ИНС, а по выходу - с БЦВМ.
Известна инерциально-спутниковая система, содержащая спутниковый датчик скорости, последовательно соединенные по первому и второму входам-выходам инерциальный датчик скорости и курса, блок коррекции составляющих скорости, блок переключения, блок корректирующих фильтров, первый и второй выходы которого подключены соответственно к третьему и четвертому входам блока коррекции составляющих скорости, на пятый и шестой входы которого подключены соответственно первый и второй выходы спутникового датчика скорости, третий выход которого подключен к третьему входу блока переключения, отличающаяся тем, что в нее дополнительно введены четыре блока формирования приращения скорости, блок формирования погрешностей составляющих скорости и блок коррекции курса, на первый, второй, третий, четвертый, пятый и шестой входы которого подключены соответственно выходы третьего, четвертого, первого и второго блоков формирования приращения скорости, третий выход спутникового датчика скорости и третий выход инерциального датчика скорости и курса, первый и второй выходы которого подключены соответственно к входам первого и второго блоков формирования приращений, а первый и второй выходы спутникового датчика скорости подключены соответственно к входам третьего и четвертого блоков формирования приращения, причем на седьмой и восьмой входы блока коррекции составляющих скорости подключены соответственно первый и второй выходы блока формирования погрешностей составляющих скорости, на первый, второй, третий, четвертый, пятый, шестой и седьмой входы которого подключены соответственно первый, второй и третий выходы спутникового датчика скорости, первый и второй выходы блока коррекции курса, третий и четвертый выходы блока коррекции составляющих скорости [3].
Известен также комбинированный навигационный комплекс [4], содержащий инерциальную навигационную систему, спутниковую навигационную систему, навигационный вычислитель, регистратор навигационной информации, вычислитель погрешностей инерциальной навигационной системы, энергонезависимое запоминающее устройство, вычислитель поправок к составляющим скорости и азимутальному углу гироплатформы инерциальной навигационной системы.
Известна комбинированная система навигации (навигационный автоматический координатор в сочетании с доплеровским измерителем скорости и угла сноса) [5], являющаяся по технической сущности наиболее близкой к предлагаемой. Комбинированная система-прототип содержит измеритель истинной воздушной скорости, курсовую систему, доплеровский измеритель скорости и угла сноса, сумматор и раскладчик навигационного автоматического координатора, запоминающее устройство, вычислитель составляющих скорости ветра и интеграторы скоростей. Указанная система с целью повышения точности счисления координат местоположения самолета обеспечивает определение и запоминание составляющих скорости ветра и их учет при формировании значений путевой скорости при счислении координат.
Недостатком известной комбинированной системы навигации является недостаточная точность при ее применении на высокоманевренных летательных аппаратах (например, на многоцелевых истребителях), обусловленная недостаточной точностью или неработоспособностью доплеровского измерителя скорости и угла сноса при его применении на указанном типе летательных аппаратов.
Целью изобретения является повышение точности счисления координат летательного аппарата при применении системы навигации на высокоманевренных летательных аппаратах, в том числе в условиях ускоренной подготовки при использовании режима курсовоздушного счисления.
Сущность изобретения заключается в том, что комбинированная система навигации содержит курсовертикаль, систему воздушных сигналов, вычислитель составляющих скорости ветра, запоминающее устройство, навигационный вычислитель, интегратор составляющих скорости и радиолокационный однокомпонентный измеритель скорости, определяющий проекцию скорости летательного аппарата на направление своего луча при его сканировании и выдающий данные о направлении сканирующего луча в азимуте и относительно плоскости горизонта. При этом вычислитель составляющих скорости ветра вычисляет проекцию скорости летательного аппарата на направление луча радиолокационного измерителя скорости по данным об истинной воздушной скорости от системы воздушных сигналов и по данным о курсе и тангаже летательного аппарата от курсовертикали и по вычисленному значению проекции скорости летательного аппарата на направление луча радиолокационного измерителя скорости и по значению проекции скорости летательного аппарата на направление луча радиолокационного измерителя скорости, полученного от радиолокационного измерителя скорости, определяет, например, методом оптимальной фильтрации Калмана, составляющие скорости ветра и постоянную составляющую погрешности измерения истинной скорости системой воздушных сигналов.
Предлагается с целью повышения точности формирования навигационных параметров использовать однокомпонентные высокоточные измерения проекции скорости летательного аппарата на различные направления в процессе сканирования антенны радиолокационной станции для оценки двух горизонтальных составляющих скорости ветра и их учета при формировании значений путевой скорости.
Сущность изобретения поясняется чертежами, на которых приведены:
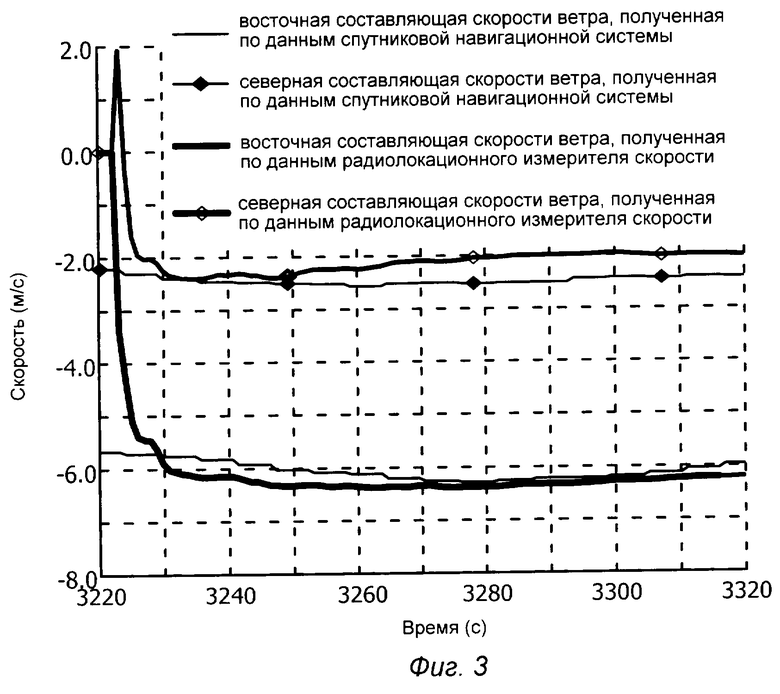
на фиг.1 - функциональная схема комбинированной системы навигации;
на фиг.2 - график разностей скоростей, измеренных радиолокационным измерителем скорости и вычисленных по информации курсовоздушного режима;
на фиг.3 - графики оценок северной и восточной составляющих скорости ветра, полученных по информации радиолокационного измерителя скорости и спутниковой навигационной системы.
На фиг.1 обозначены: 1 - курсовертикаль; 2 - система воздушных сигналов (СВС); 3 - радиолокационный измеритель скорости; 4 - вычислитель составляющих скорости ветра; 5 - запоминающее устройство; 6 - навигационный вычислитель; 7 - интегратор составляющих скорости; 8 - выход навигационной информации.
Выход курсовертикали 1 соединен с входом радиолокационного измерителя 3 скорости, с первыми входами вычислителя 4 составляющих скорости ветра и навигационного вычислителя 6. Выход системы 2 воздушных сигналов соединен со вторыми входами вычислителя 4 составляющих скорости ветра и навигационного вычислителя 6. Выход радиолокационного измерителя 3 скорости соединен с третьим входом вычислителя 4 составляющих скорости ветра. Выход вычислителя 4 составляющих скорости ветра соединен с входом запоминающего устройства 5, выход которого соединен с третьим входом навигационного вычислителя 6, выход которого соединен с входом интегратора составляющих скоростей, выход которого является выходом 8 навигационной информации.
При этом вычислитель 4 составляющих скорости ветра выполнен с возможностью вычисления проекции скорости летательного аппарата на направление луча радиолокационного измерителя 3 скорости по данным об истинной воздушной скорости от системы 2 воздушных сигналов и по данным о курсе и тангаже летательного аппарата от курсовертикали 1 и с возможностью по вычисленному значению проекции скорости летательного аппарата на направление луча радиолокационного измерителя 3 скорости и по значению проекции скорости летательного аппарата на направление луча радиолокационного измерителя 3 скорости, полученного от радиолокационного измерителя 3 скорости, определения, например методом оптимальной фильтрации Калмана, составляющих скорости ветра и постоянной составляющая погрешности измерения истинной скорости системой 2 воздушных сигналов.
В качестве радиолокационного измерителя 3 скорости может использоваться бортовая однолучевая радиолокационная станция, работающая в режиме селекции движущихся целей (с механически сканирующей антенной или фазированной антенной решеткой). Направление луча радиолокационного измерителя 3 скорости в азимуте изменяется с периодом от 0,1 до 10 секунд с амплитудой 30-60° (преимущественно около 45°), что обеспечивает определение погрешностей обеих горизонтальных составляющих скорости летательного аппарата (северной и восточной), формируемых по информации курсовертикали 1 и системы 2 воздушных сигналов.
Вычислитель 4 составляющих скорости ветра и навигационный вычислитель 6 представляют собой бортовые электронно-вычислительные машины, обрабатывающие цифровые сигналы, поступающие на их входы. Интегратор 7 составляющих скоростей является вычислительным устройством (например, электронно-вычислительной машиной), которое по данным о составляющих скоростей осуществляет вычисление координат. Функции вычислителей 4, 6 и интегратора 7 могут выполняться также одной бортовой электронно-вычислительной машиной, работающей в многозадачном режиме.
Вычислители 4 и 6 могут быть выполнены аналогичными бортовым вычислителям в изобретении [4].
Предлагаемая комбинированная навигационная система при полете летательного аппарата работает следующим образом.
Курсовертикаль 1 вырабатывает данные об углах истинного курса ψист, крена γ и тангажа ϑ.
Система воздушных сигналов 2 вырабатывает данные о высоте полета летательного аппарата (Н), его истинной воздушной скорости (Vист) и вертикальной скорости VH.
Радиолокационный измеритель 9 скорости измеряет проекцию скорости летательного аппарата на направление своего луча Wрлс. Кроме этого, радиолокационный измеритель 9 скорости вырабатывает данные о направлении своего луча (углах сканирования луча в азимуте Eg и относительно плоскости горизонта Еb).
Формирование значений углов Еg и Еb, выдаваемых радиолокационным измерителем 3 скорости, производится по выдаваемым на его вход курсовертикалью 1 данным об углах истинного курса ψист, крена γ и тангажа ϑ летательного аппарата и данным об углах разворота антенны радиолокационного измерителя 3 скорости от датчиков, установленных на осях ее карданова подвеса (или соответствующих углов фазированной решетки).
Вычисление составляющих скорости ветра производится вычислителем 4 составляющих скорости ветра следующим образом.
Вычисляются северная (VNкв) и восточная (VEкв) составляющие скорости летательного аппарата:
Вычисляется значение проекции скорости летательного аппарата на направление сканирующего луча радиолокационного измерителя 3 скорости:

где 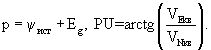
Вычисляется погрешность вычисленной проекции скорости летательного аппарата на направление сканирующего луча радиолокационного измерителя 3 скорости путем сравнения полученного значения W с данными радиолокационного измерителя 3 скорости Wрлс:
ΔW=Wpлc-W. (3)
С другой стороны, можно записать:
ΔW=ΔWсвс-ΔVNв·cosp·cosEb+ΔVEв sinp·cosEb (4),
где ΔWcвc - постоянная составляющая погрешности измерения истинной скорости системой 2 воздушных сигналов, ΔVNв - северная составляющая скорости ветра, ΔVEв - восточная составляющая скорости ветра.
Вычислитель 4 составляющих скорости ветра получает результаты измерений скорости летательного аппарата Vист и VH от системы 2 воздушных сигналов, данные о курсе ψист и тангаже ϑ летательного аппарата от курсовертикали 1, значение проекции скорости летательного аппарата на направление луча радиолокационного измерителя 3 скорости Wрлс, углах сканирования антенны в азимуте Eg и относительно плоскости горизонта Еb, от радиолокационного измерителя 3 скорости. На основании этих данных вычислитель 4 составляющих скорости ветра рассчитывает погрешность проекции скорости летательного аппарата на направление сканирующего луча радиолокационного измерителя 3 скорости по формулам (1)-(3).
Подставив результаты расчетов ΔW по формулам (1)-(3) в выражение (4), можно получить систему алгебраических уравнений, решая которую, вычислитель 4 составляющих скорости ветра находит значения ΔWсвс, ΔVNв, ΔVЕв. Эти значения записываются в запоминающее устройство 5 и в дальнейшем используются навигационным вычислителем 6 при курсовоздушном счислении координат летательного аппарата. Для решения системы алгебраических уравнений (нахождения ΔWсвс, ΔVNв, ΔVЕв) используется метод с применением оптимального фильтра Калмана.
Навигационный вычислитель 6 вычисляет и выдает в интегратор 7 составляющих скорости значения северной и восточной составляющих скорости летательного аппарата. По этим данным интегратор 7 составляющих скорости осуществляет вычисление координат летательного аппарата, и на его выходе формируются сигналы (коды), пропорциональные координатам летательного аппарата. Эти сигналы могут использоваться для управления движением летательного аппарата, управления оружием и для других целей.
С использованием материалов летных испытаний получены предварительные результаты точности оценок составляющих скорости ветра предлагаемой комбинированной навигационной системой. На фиг.2 представлен график разностей скоростей, измеренных радиолокационным измерителем скорости и вычисленных по информации курсовоздушного режима. На фиг.3 - графики оценок северной и восточной составляющих скорости ветра, полученных по информации радиолокационного измерителя скорости, а также для сравнения оценки соответствующих величин, полученные с использованием спутниковой навигационной системы. Проведенные летные испытания показали, что использование изобретения позволяет оценивать составляющие скорости ветра с ошибкой не более 0.5 м/с за время 5-10 секунд, что позволяет исключить влияние ветра, как основного источника погрешностей, на точность курсовоздушного счисления координат местоположения летательного аппарата.
Таким образом, в результате использования предлагаемого изобретения достигается технический результат, заключающийся в повышении точности определения координат летательного аппарата.
Представленные чертежи и описание предлагаемого изобретения позволяют, используя существующую элементную базу, изготовить его промышленным способом и использовать в навигационных комплексах летательных аппаратов, преимущественно многоцелевых истребителей и вертолетов, что характеризует предлагаемое изобретение как промышленно применимое.
Источники информации
1. Свидетельство РФ 1530 на ПМ, МПК G 01 C 21/24, опубл. 16.01.1996 г.
2. Свидетельство РФ 15604 на ПМ, МПК G 01 C 23/00, опубл. 27.10.2000 г.
3. Патент РФ №2073210, МПК G 01 C 21/00, опубл. 10.02.1997 г.
4. Патент РФ №2170410, МПК G 01 C 23/00, опубл. 10.01.2001 г.
5. В.Г.Денисов. Навигационное оборудование летательных аппаратов. М.: Государственное научно-техническое издательство ОБОРОНГИЗ, 1963, с.334 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НА БОРТУ ЛЕТАТЕЛЬНОГО АППАРАТА И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2461801C1 |
| СУДОВОЙ НАВИГАЦИОННЫЙ КОМПЛЕКС | 2011 |
|
RU2478187C2 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170409C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННО-ПРИЦЕЛЬНАЯ СИСТЕМА | 2010 |
|
RU2451907C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| КОМПЛЕКС НАВИГАЦИИ И ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2003 |
|
RU2215995C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТРОЙСТВО ВЫЧИСЛЕНИЯ СКОРОСТИ И КООРДИНАТ, БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ, СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2373498C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2230294C1 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |

Изобретение относится к области навигации и может быть использовано в навигационных комплексах летательных аппаратов, преимущественно многоцелевых истребителей и вертолетов. Технический результат заключается в повышении точности счисления координат летательного аппарата. Сущность изобретения: комбинированная система навигации содержит курсовертикаль, систему воздушных сигналов, вычислитель составляющих скорости ветра, запоминающее устройство, навигационный вычислитель, интегратор составляющих скорости и радиолокационный измеритель скорости, определяющий проекцию скорости летательного аппарата на направление своего луча при его сканировании и выдающий данные о направлении сканирующего луча в азимуте и относительно плоскости горизонта. 3 ил.
Комбинированная система навигации, характеризующаяся тем, что она содержит курсовертикаль, систему воздушных сигналов, вычислитель составляющих скорости ветра, запоминающее устройство, навигационный вычислитель, интегратор составляющих скорости и радиолокационный измеритель скорости, при этом выход курсовертикали соединен с входом радиолокационного измерителя скорости, с первыми входами вычислителя составляющих скорости ветра и навигационного вычислителя, выход системы воздушных сигналов соединен со вторыми входами вычислителя составляющих скорости ветра и навигационного вычислителя, выход радиолокационного измерителя скорости соединен с третьим входом вычислителя составляющих скорости ветра, выход которого соединен с входом запоминающего устройства, выход которого соединен с третьим входом навигационного вычислителя, выход которого соединен с входом интегратора составляющих скорости, выход которого является выходом навигационной информации.
| ДЕНИСОВ В.Г | |||
| Навигационное оборудование летательных аппаратов | |||
| - М.: Государственное научно-техническое издательство Оборонгиз, 1963, с.334 | |||
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170409C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170410C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178147C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1998 |
|
RU2146803C1 |
| US 5841370 А, 24.11.1998 | |||
| US 5451963 А, 19.09.1995. | |||

