Изобретение относится к навигации и может быть использовано для определения координат местоположения и параметров движения летательных аппаратов, запускаемых с подвижного носителя.
Известен комбинированный навигационный комплекс [1]. Комплекс содержит инерциальную навигационную систему, спутниковую навигационную систему, навигационный вычислитель, регистратор навигационной информации, вычислитель погрешностей инерциальной навигационной системы, энергонезависимое запоминающее устройство, вычислитель поправок к составляющим скорости и азимутальному углу гироплатформы инерциальной навигационной системы.
Недостатком известного навигационного комплекса является недостаточная точность определения навигационных параметров в условиях отсутствия достоверной информации от спутниковой навигационной системы (в условиях воздействия помех, при затенении антенн в условиях интенсивного маневрирования летательного аппарата и др.).
Известна также интегрированная система ориентации и навигации, описанная в [2], содержащая три датчика угловых скоростей, три акселерометра, приемную аппаратуру спутниковой навигационной системы, пульт управления, контроля и обработки данных. В основе работы данной системы лежат алгоритмы корректируемой бесплатформенной инерциальной навигационной системы на датчиках угловых скоростей, включающие алгоритмы предварительной обработки данных инерциальных датчиков, алгоритмы выработки параметров поступательного и вращательного движения, алгоритмы оптимального линейного фильтра Калмана, при этом в системе производится определение погрешностей бескарданных инерциальных измерительных модулей в моделировании горизонтального трехгранника с географической ориентацией осей, выработки составляющих линейной скорости и координат места объекта, а также вычисляются оценки низкочастотных составляющих дрейфов датчиков угловых скоростей и погрешностей акселерометров в связанных осях.
Недостатком известной интегрированной системы ориентации и навигации является необходимость использования данных спутниковой навигационной системы, установленной непосредственно на объекте (летательном аппарате).
Наиболее близким к предлагаемому навигационному комплексу является комбинированный навигационный комплекс летательного аппарата [3], содержащий инерциальную навигационную систему, спутниковую навигационную систему, навигационный вычислитель, регистратор навигационной информации, вычислитель погрешностей инерциальной навигационной системы, энергонезависимое запоминающее устройство, первый вычислитель поправок к составляющим скорости и азимутальному углу гироплатформы инерциальной навигационной системы, радиолокационный измеритель скорости летательного аппарата, вычислитель погрешностей радиолокационного измерителя скорости и второй вычислитель поправок к составляющим скорости и азимутальному углу гироплатформы инерциальной навигационной системы.
Недостатком прототипа является низкая точность определения начального значения курса летательного аппарата и соответственно низкая точность определения координат местоположения летательного аппарата на последующих стадиях полета при запуске летательного аппарата с подвижного носителя, а также значительное время, требующееся для начальной выставки инерциальной навигационной системы.
Задачей изобретения является повышение точности определения координат местоположения летательного аппарата при его запуске с подвижного носителя.
Сущность изобретения заключается в том, что навигационный комплекс летательного аппарата содержит бесплатформенную инерциальную навигационную систему, измеритель составляющих ускорения носителя и составляющих угловой скорости носителя, запоминающее устройство, вычислитель оценок углов ориентации летательного аппарата относительно носителя, вычислитель курса, крена и тангажа летательного аппарата, измеритель углов ориентации носителя, канал передачи данных об углах ориентации носителя, при этом первый вход запоминающего устройства соединен с выходом измерителя составляющих ускорения носителя и составляющих угловой скорости носителя, первый вход вычислителя курса, крена и тангажа летательного аппарата связан каналом передачи данных об углах ориентации носителя с измерителем углов ориентации носителя, первый выход бесплатформенной инерциальной навигационной системы образует выход навигационных данных, второй выход бесплатформенной инерциальной навигационной системы соединен со вторым входом запоминающего устройства, выход запоминающего устройства соединен со входом вычислителя оценок углов ориентации летательного аппарата относительно носителя, выход которого соединен со вторым входом вычислителя курса, крена и тангажа летательного аппарата, выход которого соединен с входом бесплатформенной инерциальной навигационной системы.
Сущность изобретения поясняется чертежами, на которых представлены:
на фиг.1 - функциональная схема навигационного комплекса;
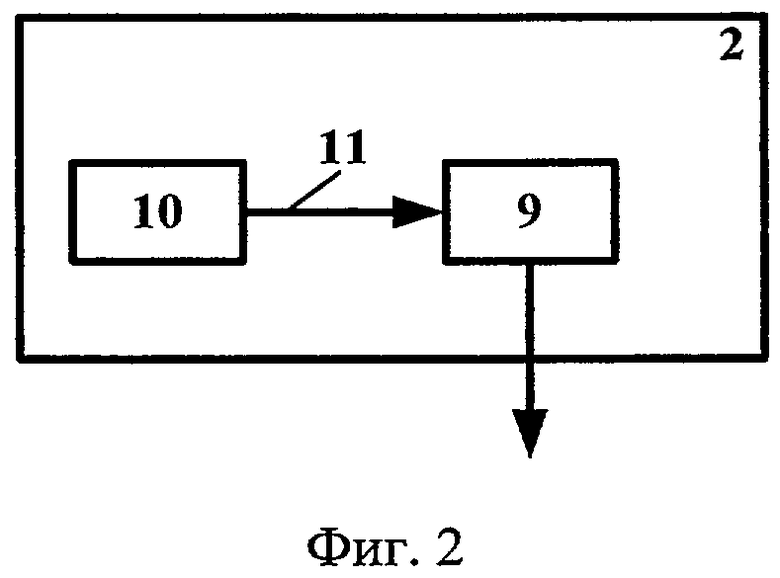
на фиг.2 - функциональная схема измерителя составляющих ускорения носителя и составляющих угловой скорости носителя.
На чертежах обозначены:
1 - бесплатформенная инерциальная навигационная система;
2 - измеритель составляющих ускорения носителя и составляющих угловой скорости носителя;
3 - запоминающее устройство;
4 - вычислитель оценок углов ориентации летательного аппарата относительно носителя;
5 - вычислитель курса, крена и тангажа летательного аппарата;
6 - измеритель углов ориентации носителя;
7 - выход навигационных данных;
8 - канал передачи данных об углах ориентации носителя;
9 - вычислитель составляющих ускорения носителя и составляющих угловой скорости носителя;
10 - измеритель координат и составляющих скорости носителя;
11 - канал передачи данных о координатах и составляющих скорости носителя.
Бесплатформенная инерциальная навигационная система 1 содержит блок бескарданных инерциальных измерительных модулей и навигационный вычислитель. Второй выход бесплатформенной инерциальной навигационной системы 1 является выходом блока бескарданных инерциальных измерительных модулей. На этом выходе формируются сигналы составляющих ускорения летательного аппарата аxла, аyла, аzла (от акселерометров) и составляющих угловой скорости летательного аппарата ωхла, ωyла, ωz ла (от датчиков угловых скоростей). Первый выход бесплатформенной инерциальной навигационной системы 1 является выходом навигационного вычислителя. На этом выходе формируются сигналы курса, крена, тангажа и координат местоположения летательного аппарата, а также могут формироваться и другие сигналы навигационных параметров (например, сигналы составляющих линейной скорости летательного аппарата). Навигационный вычислитель бесплатформенной инерциальной навигационной системы 1 выполнен с возможностью приема данных о начальном положении летательного аппарата через свой вход, который является входом бесплатформенной инерциальной навигационной системы 1. Эти данные используются в качестве начальных значений при интегрировании в навигационном вычислителе данных, полученных от блока бескарданных инерциальных измерительных модулей. Кроме этого, навигационный вычислитель через свой вход может получать также данные о погрешностях датчиков блока бескарданных инерциальных измерительных модулей, которые также учитываются при вычислениях. Данные бесплатформенная инерциальная навигационная система 1 выдает в течение всего времени работы.
Бесплатформенная инерциальная навигационная система 1 выполнена с возможностью ввода данных о курсе, крене и тангаже летательного аппарата ψла, ϑла, γла, вторые используются в качестве начальных значений при счислении навигационных параметров (при вычислении курса, крена, тангажа, а также координат местоположения летательного аппарата).
Измеритель 2 составляющих ускорения носителя и составляющих угловой скорости носителя может содержать измеритель 10 координат и составляющих скорости носителя, выход которого каналом 11 передачи данных о координатах и составляющих скорости носителя соединен со входом вычислителя 9 составляющих ускорения носителя и составляющих угловой скорости носителя, выход которого является выходом измерителя 2 составляющих ускорения носителя и составляющих угловой скорости носителя.
В качестве измерителя 10 координат и составляющих скорости носителя может использоваться навигационный комплекс носителя.
Вычислитель 9 составляющих ускорения носителя и составляющих угловой скорости носителя выполнен с возможностью вычисления составляющих ускорения носителя ax к, ayк, azк и составляющих угловой скорости носителя ωхк, ωy к, ωzк по полученным от измерителя 10 координат и составляющих скорости носителя данным о координатах местоположения носителя ϕ (широта), λ (долгота), Н (высота), составляющих скоростей носителя Vx (восточная), Vy (северная), Vz (вертикальная).
Вычисления производится согласно следующим формулам:

где Rx, Ry - радиусы кривизны земного эллипсоида, рассчитываемые по формулам:
где f - квадрат первого эксцентриситета земного эллипсоида;
а - большая полуось земного эллипсоида;
где

U - угловая скорость вращения Земли;
Вычислитель 9 составляющих ускорения носителя и составляющих угловой скорости носителя, вычислитель 4 оценок углов ориентации летательного аппарата относительно носителя, вычислитель 5 курса, крена и тангажа летательного аппарата представляют собой бортовые электронно-вычислительные машины, обрабатывающие цифровые сигналы, поступающие на их входы. В качестве каналов 8 и 11 передачи данных могут использоваться различные цифровые и аналоговые каналы, например мультиплексные каналы информационного обмена, выполненные в соответствии с ГОСТ 26765.52-87 или радиальные каналы информационного обмена, выполненные в соответствии с ГОСТ18977-79. При этом каналы 8 и 11 передачи данных выполнены с возможностью отсоединения при старте летательного аппарата с носителя. Каналы 8 и 11 передачи данных могут быть выполнены также в виде беспроводных каналов передачи данных.
Навигационный комплекс работает следующим образом.
При нахождении летательного аппарата на носителе производится непрерывный сбор навигационных данных от измерителя 2 составляющих ускорения носителя и составляющих угловой скорости носителя и от бесплатформенной инерциальной навигационной системы 1. Эти данные заносятся в запоминающее устройство 3, в котором в результате образуются массивы навигационных данных: данных о составляющих ускорения носителя ax к, ay к, azк, o составляющих угловой скорости носителя ωxк, ωyк, ωzк, данных о составляющих ускорения аxла, аула, аzла и составляющих угловой скорости летательного аппарата ωхла, ωула, ωzла. Сбор данных производится по меньшей мере в течение в течение 0.75 периода качки подвижного носителя, что составляет от 30 до 60 секунд. Частота получения данных составляет от 0.1 с до 1 с. При этом массивы данных должны состоять по меньшей мере из 100 отсчетов.
На основании массивов данных, сохраненных в запоминающем устройстве 3 (данных о составляющих ускорения axла, aула, аzла и составляющих угловой скорости летательного аппарата ωхла, ωула, ωzла, а также данных о составляющих ускорения носителя ax к, aук, azк, составляющих угловой скорости носителя ωхк, ωук, ωzк) в вычислителе 4 оценок углов ориентации летательного аппарата относительно носителя вычисляются оценки 

 углов ориентации летательного аппарата Δχ, Δϑ, Δγ, которые передаются в вычислитель 5 курса, крена и тангажа летательного аппарата и запоминаются в нем.
углов ориентации летательного аппарата Δχ, Δϑ, Δγ, которые передаются в вычислитель 5 курса, крена и тангажа летательного аппарата и запоминаются в нем.
Вычисление производится следующим образом.
Вычисляются проекции абсолютной угловой скорости географического трехгранника на его оси:
ωa x=ωx к+Ux
ωa y=ωy к+Uy
ωa z=ωz к+Uz
Вычисляются составляющие кажущегося ускорения в осях связанного трехгранника

где С - матрица направляющих косинусов связанного трехгранника относительно сопровождающего, вычисляемая по формулам:
С11=cosϑ cosψ;
С12=-sinγ sinψ-cosγ sinϑ cosψ;
С13=-cosγ sinψ+sinγ sinϑ cosψ;
С21=-cosϑ sinψ;
C22=-sinγ cosψ+cosγ sinϑ sinψ;
С23=-cosγ cosψ-sinγ sinϑ sinψ;
С31=sinϑ;
C32=cosγ cosϑ;
С33=-sinγ cosϑ.
Вычисляются угловые скорости связанного трехгранника относительно географического:
Вычисляются проекции абсолютной угловой скорости связанного трехгранника на его оси:

Далее производятся вычисление оценок 

 углов ориентации летательного аппарата относительно носителя Δχ, Δϑ, Δγ, например, используя метод наименьших квадратов. При этом вектор измерений формируются согласно соотношениям:
углов ориентации летательного аппарата относительно носителя Δχ, Δϑ, Δγ, например, используя метод наименьших квадратов. При этом вектор измерений формируются согласно соотношениям:
Δωx=ωx ла-(ωx кcosχ+ωz кsinχ)cosΔϑ-ωy кsinΔϑ
Δωz=ωz ла-(ωz кcosχ-ωx кsinχ)cosΔγ-ωy кsinΔγ
Δax=ax ла-(ax кcosχ+az кsinχ)cosΔϑ-ay кsinΔϑ
Δaz=az ла-(az кcosχ-ax кsinχ)cosΔγ-ay кsinΔγ
Вычислитель 5 курса, крена и тангажа летательного аппарата непрерывно принимает данные о об углах курса ψк, крена γк и дифферента (тангажа) ϑк носителя от навигационного комплекса носителя и с учетом оценок 

 углов ориентации летательного аппарата производит вычисление курса, крена и тангажа летательного аппарата ψла, ϑла, γла, которые выдаются в навигационный вычислитель бесплатформенной инерциальной навигационной системы 1 в качестве начальных значений при дальнейшем счислении навигационных параметров летательного аппарата.
углов ориентации летательного аппарата производит вычисление курса, крена и тангажа летательного аппарата ψла, ϑла, γла, которые выдаются в навигационный вычислитель бесплатформенной инерциальной навигационной системы 1 в качестве начальных значений при дальнейшем счислении навигационных параметров летательного аппарата.
Вычисление производится согласно следующим соотношениям:



После старта летательного аппарата навигационный комплекс переходит в режим счисления по данным блока бескарданных инерциальных измерительных модулей системы 1.
Таким образом, в результате введения в навигационный комплекс летательного аппарата измерителя составляющих ускорения носителя и составляющих угловой скорости носителя, вычислителя оценок углов ориентации летательного аппарата относительно носителя, вычислителя курса, крена и тангажа летательного аппарата, измерителя углов ориентации носителя достигнут технический результат, заключающийся в повышении точности определения начальных значений курса, крема и тангажа летательного аппарата при запуске его с подвижного носителя и соответственно повышении точности дальнейшего счисления навигационных параметров летательного аппарата.
Представленные чертежи и описание предлагаемого изобретения позволяют, используя существующую элементную базу, изготовить его промышленным способом и использовать в навигационных системах летательных аппаратов:
многофункциональных истребителей, вертолетов, а также беспилотных летательных аппаратов и т.п., запускаемых с подвижных носителей (кораблей или летательных аппаратов), что характеризует предлагаемое изобретение как промышленно применимое.
Источники информации
1. Патент РФ №2170410 на изобретение, МПК G 01 C 23/00, опубл. 10.01.2001 г.
2. Анучин О.Н., Емельянцев Г.И. О влиянии угловых колебаний объекта на точность и время выставки по курсу интегрированной системы ориентации и навигации // «Гироскопия и навигация», 1997, №3.
3. Патент РФ №2224220 на изобретение, МПК G 01 C 23/00, опубл. 20.02.2004 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА ОРИЕНТАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2382988C1 |
| КОМПЛЕКСИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2380656C1 |
| СПОСОБ ИЗМЕРЕНИЯ КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2178145C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| Способы определения значений углов ориентации в процессе движения летательного аппарата и коррекции значений углов ориентации | 2020 |
|
RU2776856C2 |
| Способ выставки БИНС ЛА корабельного базирования и устройство для его осуществления | 2016 |
|
RU2635398C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2313067C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПОЛОЖЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2256154C1 |
| Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации | 2020 |
|
RU2745083C1 |
| МАЛОГАБАРИТНАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ, КОРРЕКТИРУЕМАЯ ОТ СИСТЕМЫ ВОЗДУШНЫХ СИГНАЛОВ | 2012 |
|
RU2502049C1 |
Изобретение относится к области приборостроения и может быть использовано для определения координат местоположения и параметров движения летательных аппаратов, запускаемых с подвижного носителя. Технический результат - повышение точности. Для достижения данного результата навигационный комплекс летательного аппарата содержит бесплатформенную инерциальную навигационную систему, измеритель составляющих ускорения носителя и составляющих угловой скорости носителя, запоминающее устройство, вычислитель оценок углов ориентации летательного аппарата относительно носителя, вычислитель курса, крена и тангажа летательного аппарата. При этом первый вход запоминающего устройства соединен с выходом измерителя составляющих ускорения носителя и составляющих угловой скорости носителя. Первый вход вычислителя курса, крена и тангажа летательного аппарата связан каналом передачи данных об углах ориентации носителя с измерителем углов ориентации носителя. 2 ил.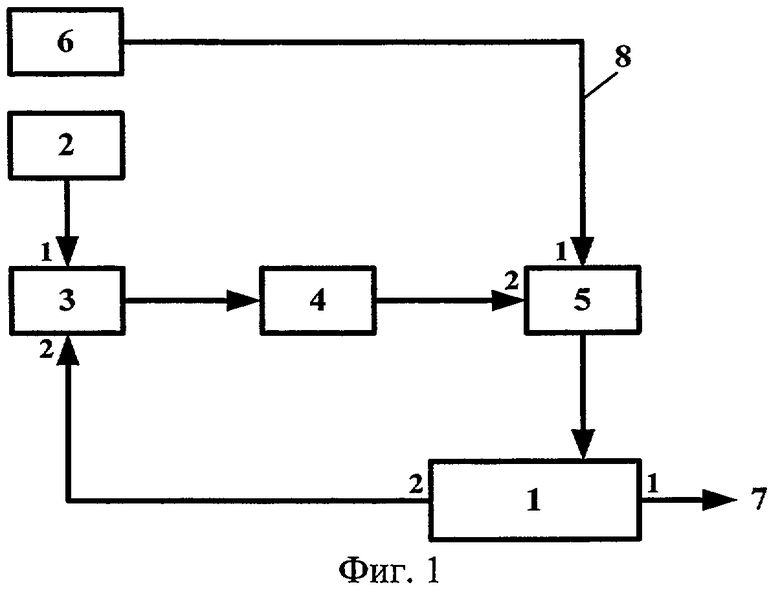
Навигационный комплекс летательного аппарата, содержащий бесплатформенную инерциальную навигационную систему, измеритель составляющих ускорения носителя и составляющих угловой скорости носителя, запоминающее устройство, вычислитель оценок углов ориентации летательного аппарата относительно носителя, вычислитель курса, крена и тангажа летательного аппарата, измеритель углов ориентации носителя, канал передачи данных об углах ориентации носителя, при этом первый вход запоминающего устройства соединен с выходом измерителя составляющих ускорения носителя и составляющих угловой скорости носителя, первый вход вычислителя курса, крена и тангажа летательного аппарата связан каналом передачи данных об углах ориентации носителя с измерителем углов ориентации носителя, первый выход бесплатформенной инерциальной навигационной системы образует выход навигационных данных, второй выход бесплатформенной инерциальной навигационной системы соединен со вторым входом запоминающего устройства, выход запоминающего устройства соединен со входом вычислителя оценок углов ориентации летательного аппарата относительно носителя, выход которого соединен со вторым входом вычислителя курса, крена и тангажа летательного аппарата, выход которого соединен с входом бесплатформенной инерциальной навигационной системы.
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170410C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА НАВИГАЦИИ | 2003 |
|
RU2229686C1 |
| КОМБИНИРОВАННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2224220C1 |
| US 3883812 А, 13.05.1975 | |||
| Математическое и программное обеспечение системы автономной навигации КА «Янтарь» | |||
| М., МО СССР, 1986, с.65 | |||
| DE 19510910 А1, 28.09.1995 | |||
| Устройство для испытания изделий на случайные вибрации | 1978 |
|
SU763714A1 |

