Изобретение относится к медицине, а именно к ортопедии и травматологии.
Известны электромеханические исполнительные механизмы тренажеров для разработки суставов, содержащие электродвигатель, через механическую передачу связанный с механизмом поворота сустава, и датчик положения выходного вала.
Прототипом предлагаемого электромеханического исполнительного механизма (ЭМИМ) является исполнительный механизм для тренажера, описанный в авторском свидетельстве SU 302122, 28.04.1971, где исполнительный механизм обеспечивает угловое перемещение выходного вала на величину задаваемого угла.
Недостатком прототипа является то, что исполнительный механизм не позволяет управлять дозировкой нагрузки и осуществлять вибрационное нагружение пораженного сустава.
Предлагаемый ЭМИМ отличается от прототипа тем, что для обеспечения возможности дозирования в широком диапазоне нагрузки на пораженный сустав и вибрационной нагрузки пораженного сустава ЭМИМ снабжен нагружателем выходного вала и регулятором усилия с датчиком усилия, при этом нагружатель выходного вала механически связан с регулятором усилия, который механически связан с датчиком усилия.
На чертеже представлена функциональная схема ЭМИМ.
ЭМИМ содержит исполнительный механизм 1, регулятор усилия 2, нагружатель выходного вала 3, выходной вал 4, а также датчик положения выходного вала 5.
Исполнительный механизм 1 состоит из электродвигателя 6 с механической передачей 7, выходным звеном которой является зубчатое колесо 8.
Регулятор усилия 2 содержит исполнительный электродвигатель 9, с механической передачей 10, выходной вал которой жестко связан с винтом 11, на котором установлена нажимная гайка 12, контактирующая с пружиной сжатия 13, упирающейся в упор 14. Нажимная гайка 12 зафиксирована от вращения фиксатором 15, имеющим возможность скольжения в прорези корпуса ЭМИМ и жестко соединенным с копирной гайкой 16 винтового копира 17, соединенного с движком датчика усилия 18.
Упор 14 контактирует с деталями рычажной системы 19. Рычажная система 19 выполнена в виде жесткой фермы, состоящей из двух качающихся на осях разноплечных рычагов. При этом рычаги взаимодействуют с упором 14 регулятора усилия 2 и с поршнем 20 нагружателя 3.
Нагружатель 3 состоит из установленного в неподвижном корпусе герметичного ведущего вала 21, выполненного в виде цилиндра с радиальными отверстиями для поршней 22, контактирующих одной стороной со сцепляющими элементами 23, а другой стороной - с рабочей жидкостью. Рабочая жидкость заполняет полости гидравлической системы нагружателя 3. Гидравлическая система включает в себя полости 24 ведущего вала 21 и соединенный с ними специальным каналом 25 односторонний цилиндр 26 с поршнем 20, который взаимодействует с рабочей жидкостью. На случай компенсации возможных утечек рабочей жидкости имеется дополнительная емкость 27. Сцепляющие элементы 23 контактируют с выходным валом 4. Нагружатель 3 механически связан с исполнительным механизмом 1 зубчатыми колесами 8 и 28.
Выходной вал 4 является выходным звеном нагружателя 3 и выполнен в виде цилиндра с радиальными пазами, в которых подвижно установлены сцепляющие элементы 23, и механически связан с датчиком положения 5 зубчатыми колесами 29 и 30.
ЭМИМ работает следующим образом. Предельное значение усилия устанавливается перед началом работы регулятором усилия 2. При наличии сигнала управления исполнительный двигатель 9 начинает вращаться и через механическую передачу 10 вращает винт 11, вдоль которого начинает перемещаться нажимная гайка 12 сжимая пружину 13. Пружина 13, сжимаясь, другим своим концом давит на упор 14. Усилие, с которым пружина 13 воздействует на упор 14, через рычажную систему 19 передается поршню 20 нагружателя 3. Поршень 20 сжимает рабочую жидкость, находящуюся в гидравлической системе, жидкость, в свою очередь, давит на поршни 22, которые, перемещаясь под действием этого давления, перемещают сцепляющие элементы 23, вводя их в радиальные пазы выходного вала 4. Тем самым осуществляется соединение нагружателя 3 и выходного вала 4.
Перемещение нажимной гайки 12 происходит одновременно с жестко связанной с ней копирной гайкой 17, которая, имея возможность лишь продольного перемещения, вращает через винтовой копир 17 движок датчика усилия 18.
Исполнительный двигатель 9 будет вращаться до тех пор, пока усилие, с которым прижимаются сцепляющие элементы 23 к выходному валу 4 не будет соответствовать моменту, который необходим для конкретного пораженного сустава. Это отслеживается датчиком усилия 18.
При наличии сигнала управления электродвигатель 6 начинает вращаться, и через механическую передачу 7 и зубчатые колеса 8 и 26 вращает ведущий вал 21 нагружателя 3. Вращение ведущего вала 21 через сцепляющие элементы 23 передается выходному валу 4. Величина угла перемещения выходного вала 4 через зубчатые колеса 29 и 30 измеряется датчиком положения 5.
Если выходной вал 4 повернется на угол, превышающий заданную величину, то сигнал с датчика положения 5 приводит к уменьшению управляющего сигнала, поступающего на исполнительный двигатель 6.
Если момент нагрузки на выходном валу 4 превысит величину, которую развивает нагружатель 3, то сцепляющие элементы 23 выйдут из пазов выходного вала 4 отключив выходной вал 4 от исполнительного двигателя 6.
При этом произойдет следующее: исполнительный двигатель 6 продолжает вращать ведущий вал 21, вместе с которым вращаются сцепляющие элементы 23, скользя по выходному валу 4 до тех пор, пока опять не попадут в пазы, что обеспечит новое сцепление ведущего вала 21 и выходного вала 4. Выходной вал 4 вновь начнет вращаться до тех пор, пока момент нагрузки на нем не превысит величину, развиваемую нагружателем 3.
Данный режим обеспечивает вибрационную нагрузку пораженного сустава, что значительно ускоряет процесс реабилитации пациента. Причем частота вибрации может изменяться путем изменения скорости вращения электродвигателя 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ НА ОСНОВЕ ВОЛНОВОЙ ПЕРЕДАЧИ ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2003 |
|
RU2265146C2 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПРИВОДА ИНВАЛИДНОГО КРЕСЛА-КОЛЯСКИ | 1995 |
|
RU2116774C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ НА ОСНОВЕ ВОЛНОВОЙ ПЕРЕДАЧИ ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2004 |
|
RU2265147C1 |
| РЕГУЛЯТОР ДАВЛЕНИЯ ГАЗА В ТРУБОПРОВОДЕ | 1992 |
|
RU2036507C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ НА ОСНОВЕ ВОЛНОВОЙ ПЕРЕДАЧИ | 2003 |
|
RU2253775C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РУЛЕВОГО ПРИВОДА | 2004 |
|
RU2265553C1 |
| Следящий привод | 1982 |
|
SU1061104A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ МИНИ-ПРИВОД ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2012 |
|
RU2526366C2 |
| СИЛОВОЙ МИНИ-ПРИВОД ПОДВИЖНОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2408125C1 |
| ТАЗОБЕДРЕННЫЙ СУСТАВ ЭКЗОСКЕЛЕТА | 2013 |
|
RU2549015C2 |
Изобретение относится к медицине, а именно к ортопедии и травматологии. Тренажер для разработки суставов содержит электродвигатель с исполнительным механизмом, датчик положения выходного вала, а также нагружатель выходного вала и регулятор усилия. Нагружатель выходного вала выполнен в виде цилиндра с радиальными отверстиями для поршней, расположенных радиально относительно выходного вала и контактирующих с ним через сцепляющие элементы. Полости этого цилиндра объединены в единую гидравлическую систему с полостью одностороннего цилиндра, поршень которого через рычажную систему соединен с выходным звеном регулятора усилия, состоящего из передачи винт-гайка, спиральной пружины сжатия, второго электродвигателя с механической передачей и выходного звена, выполненного в виде упора, имеющего осевое перемещение. Пружина упирается в выходное звено и гайку, а винт соединен через механическую передачу со вторым электродвигателем. Гайка сбоку имеет цилиндрическую направляющую, обеспечивающую ей только поступательное движение, и жестко соединена с движком датчика усилия через винтовой копир, при этом винт копира жестко связан с движком датчика усилия. Технический результат заключается в том, что устройство позволяет дозировать в широком диапазоне нагрузку на пораженный сустав, а также осуществлять вибрационную нагрузку пораженного сустава. 1 ил.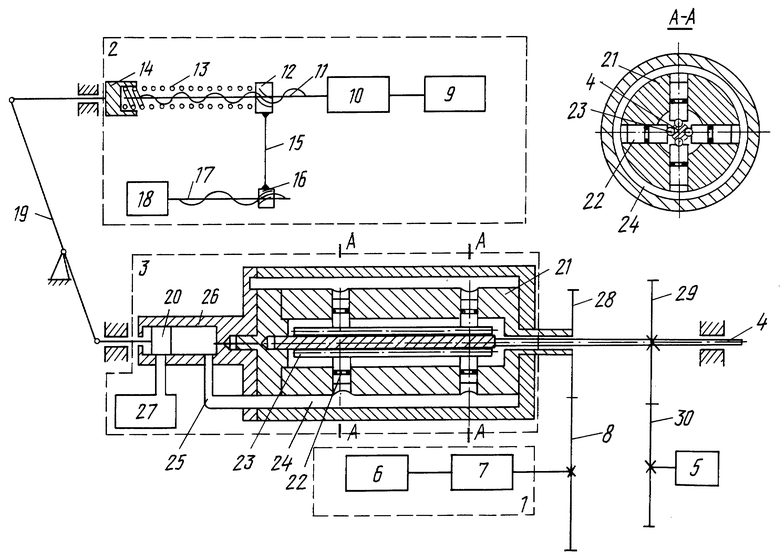
Электромеханический исполнительный механизм тренажера для разработки суставов, содержащий электродвигатель с исполнительным механизмом, выходной вал которого соединен с механизмом поворота сустава, и датчик положения выходного вала, отличающийся тем, что в него введены дополнительно нагружатель выходного вала и регулятор усилия, при этом нагружатель выходного вала выполнен в виде цилиндра с радиальными отверстиями для поршней, расположенных радиально относительно выходного вала и контактирующих с ним через сцепляющие элементы, полости этого цилиндра объединены в единую гидравлическую систему с полостью одностороннего цилиндра, поршень которого через рычажную систему соединен с выходным звеном регулятора усилия, состоящего из передачи винт - гайка, спиральной пружины сжатия, второго исполнительного электродвигателя, через механическую передачу соединенного с винтом выходного звена, выполненного в виде упора, имеющего осевое перемещение, при этом пружина упирается в выходное звено и гайку, которая сбоку имеет цилиндрическую направляющую, обеспечивающую ей только поступательное движение, и жестко соединена с движком датчика усилия через винтовой копир, при этом винт копира жестко связан с движком датчика усилия.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для вытяжения позвоночника | 1983 |
|
SU1147391A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для разработки суставов нижних конечностей | 1987 |
|
SU1468533A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство для разработки подвижности суставов нижней конечности | 1989 |
|
SU1655497A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ АППАРАТ ДЛЯ РАЗРАБОТКИСУСТАВОВ | 0 |
|
SU302122A1 |

