Изобретение относится к области машиностроения и предназначено для преобразования вращательного движения управляющего двигателя в поступательное движение выходного звена.
Известен механизм для преобразования вращательного движения в поступательное (а.с.291061), содержащий корпус, волнообразователь, гибкое колесо, закрепленное в корпусе, жесткое колесо, выходное звено, расположенное соосно гибкому колесу, входящее в зацепление с гибким колесом, опорное устройство, выполненное в виде шариков.
Недостатком конструкции является большой момент инерции волнообразователя и невозможность непосредственного соединения волнообразователя с управляющим высокооборотным двигателем из-за малого отношения периодов волнообразных поверхностей корпуса и выходного звена.
Известен исполнительный механизм на основе волновой передачи (авторское свидетельство №1352116 - прототип), содержащий корпус, в котором расположен ведущий вал, соединенный с волнообразователем, гибкое колесо, жесткое колесо, опорное устройство, выполненное в виде шариков, расположенных между корпусом и выходным звеном. Данный механизм позволяет преобразовывать вращательное движение в поступательное выходного звена.
Недостатком конструкции является большой момент инерции вращающихся частей волнообразователя, малая нагрузочная способность.
Цель разработки - уменьшение момента инерции вращающихся частей и увеличение нагрузочной способности механизма.
Цель достигается тем, что в исполнительном механизме на основе волновой передачи поступательного действия, содержащем корпус, волнообразователь, гибкое колесо, закрепленное в корпусе, жесткое колесо, выходное звено, расположенное соосно гибкому колесу, входящее в зацепление с гибким колесом, опорное устройство, выполненное в виде шариков, жесткое колесо выполнено неподвижным с аксиальными проточками эпициклоидного профиля, расположенными на его внутренней поверхности, волнообразователь снабжен толкателями и обоймой, гибкое колесо выполнено в виде подвижного сепаратора, в радиальных отверстиях которого расположены равномерно по окружности в несколько рядов шарики, выходное звено выполнено в виде штока, расположенного внутри сепаратора, снабженного по всей длине волнообразной наружной поверхностью, при этом сепаратор контактирует наружной поверхностью с вершинами эпициклоидного внутреннего профиля жесткого колеса, образуя пары скольжения, опорное устройство выполнено в виде шариков, расположенных в крайних, радиально расположенных отверстиях сепаратора, опирающихся на концентрические дорожки корпуса, выполненные на внутренней торцевой поверхности, причем толкатели контактируют с внутренней поверхностью обоймы, представляющей собой полый тонкостенный цилиндр, при этом толкатели расположены равномерно по окружности в несколько рядов в радиальных отверстиях блока цилиндров, закрепленного жестко в корпусе.
Толкатели волнообразователя могут быть выполнены в виде поршней блока цилиндров, который закреплен соосно в корпусе и снабжен каналами подачи рабочей жидкости, соединяющими цилиндры со штуцерами высокого и низкого давления через распределитель, расположенный соосно с блоком цилиндров и соединенный с управляющим электродвигателем, закрепленном жестко на корпусе.
Волнообразователь может быть дополнительно снабжен эксцентриковым валом, расположенным на ведущем валу электродвигателя, при этом внешней поверхностью эксцентриковый вал контактирует с толкателями.
Волнообразователь может быть дополнительно снабжен блоком электромагнитов, расположенных равномерно по окружности в несколько рядов в радиальных отверстиях блока цилиндров.
На фиг.1 представлен продольный разрез исполнительного механизма с гидравлическим волнообразователем.
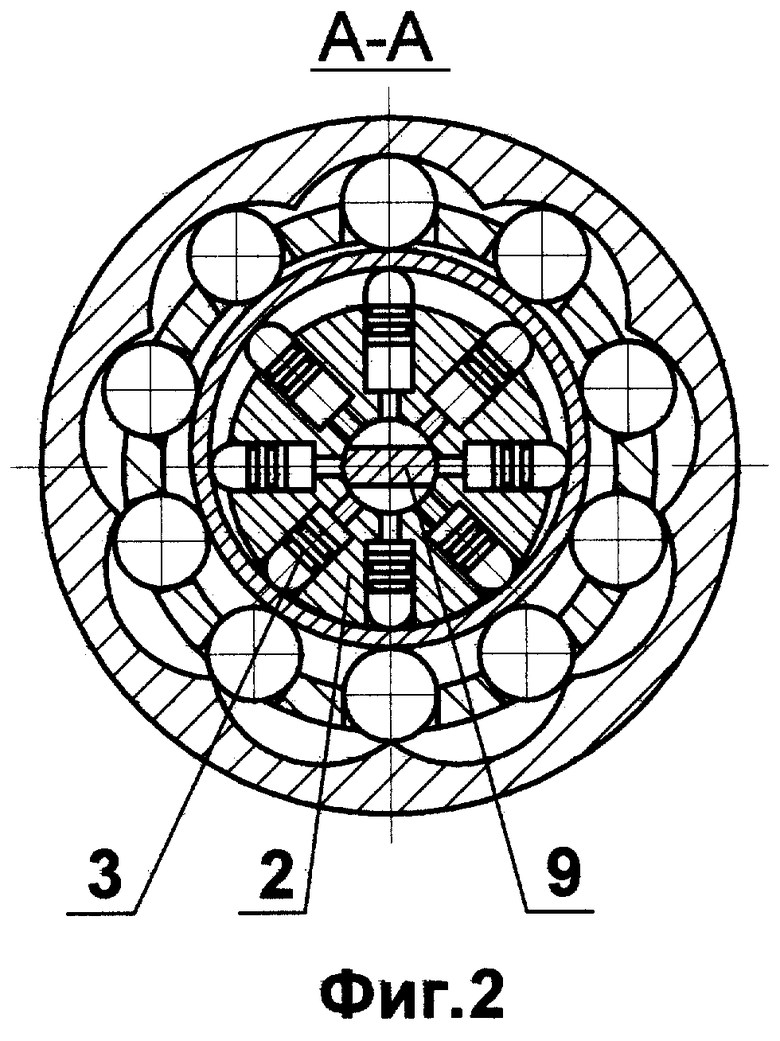
На фиг.2 представлен поперечный разрез гидравлического волнообразователя исполнительного механизма.
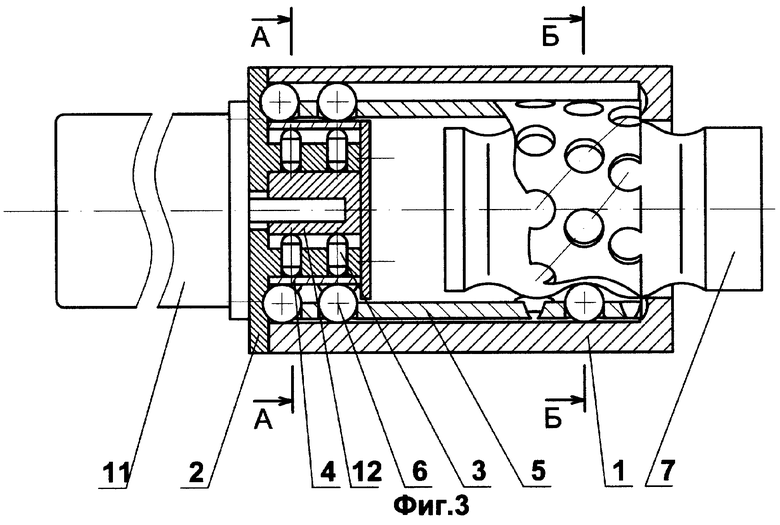
На фиг.3 представлен продольный разрез исполнительного механизма с эксцентриковым волнообразователем.
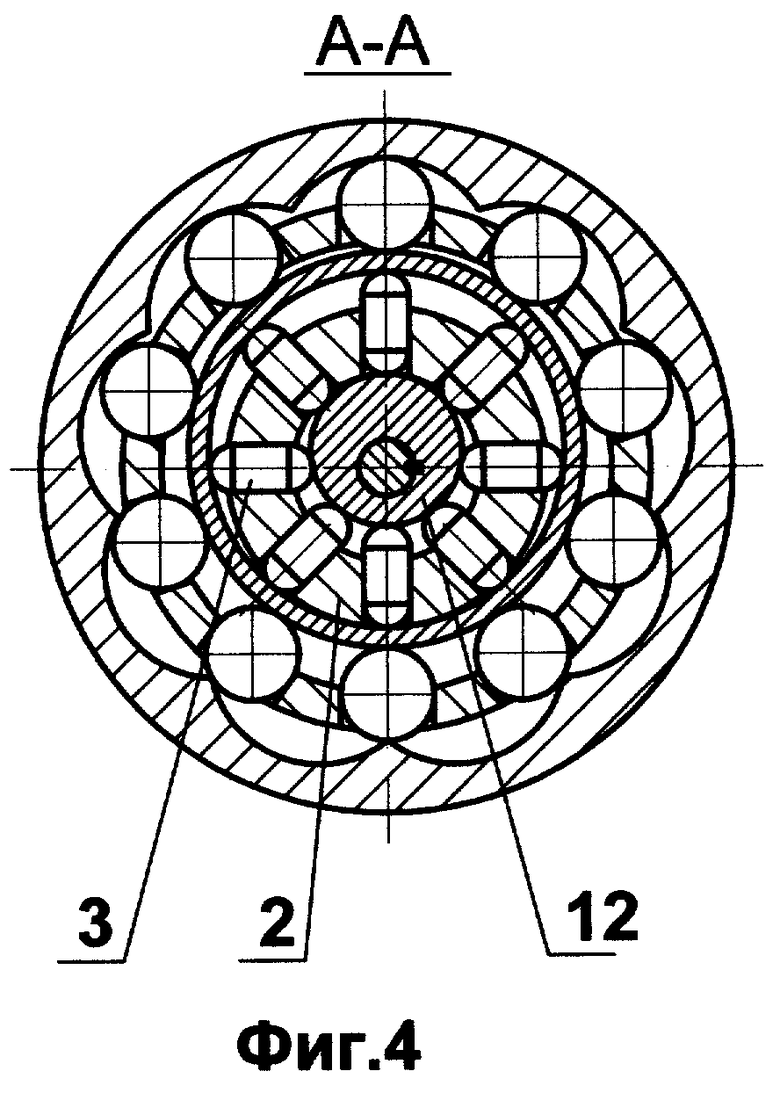
На фиг.4 представлен поперечный разрез эксцентрикового волнообразователя исполнительного механизма.
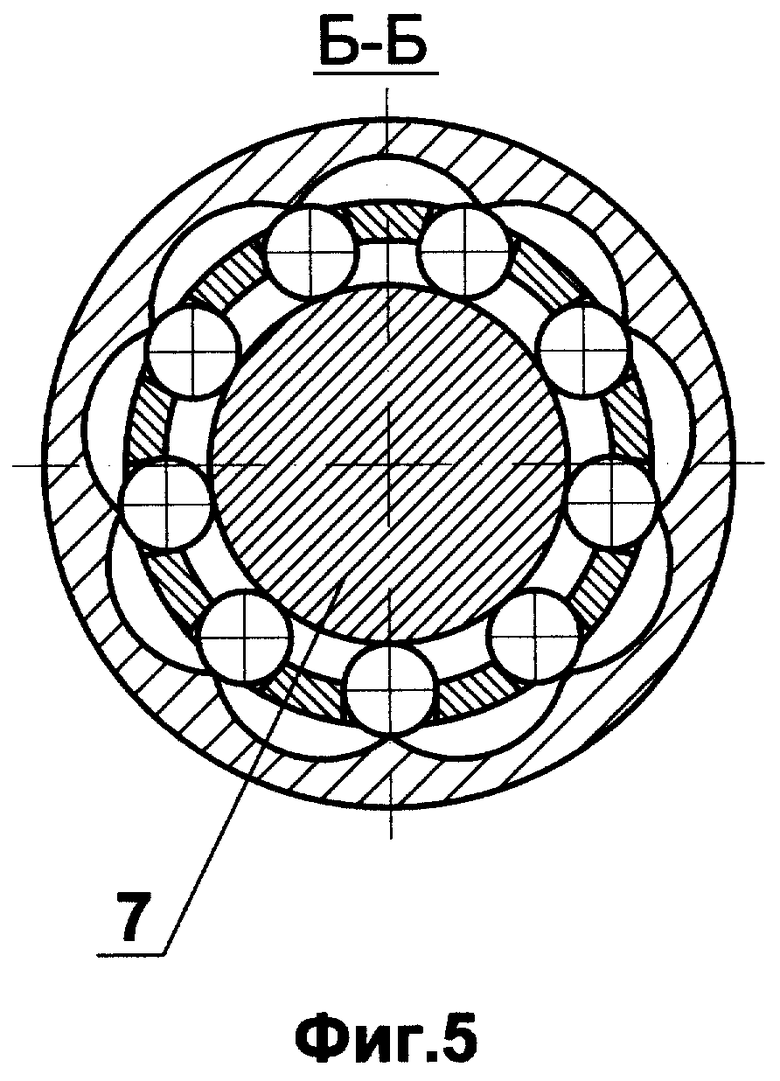
На фиг.5 представлен поперечный разрез выходного звена исполнительного механизма.
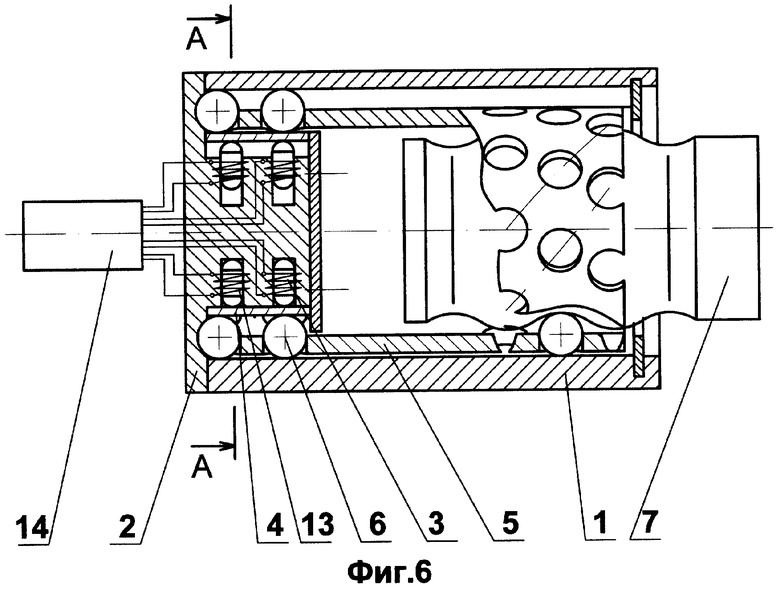
На фиг.6 представлен продольный разрез исполнительного механизма с электромагнитным волнообразователем.
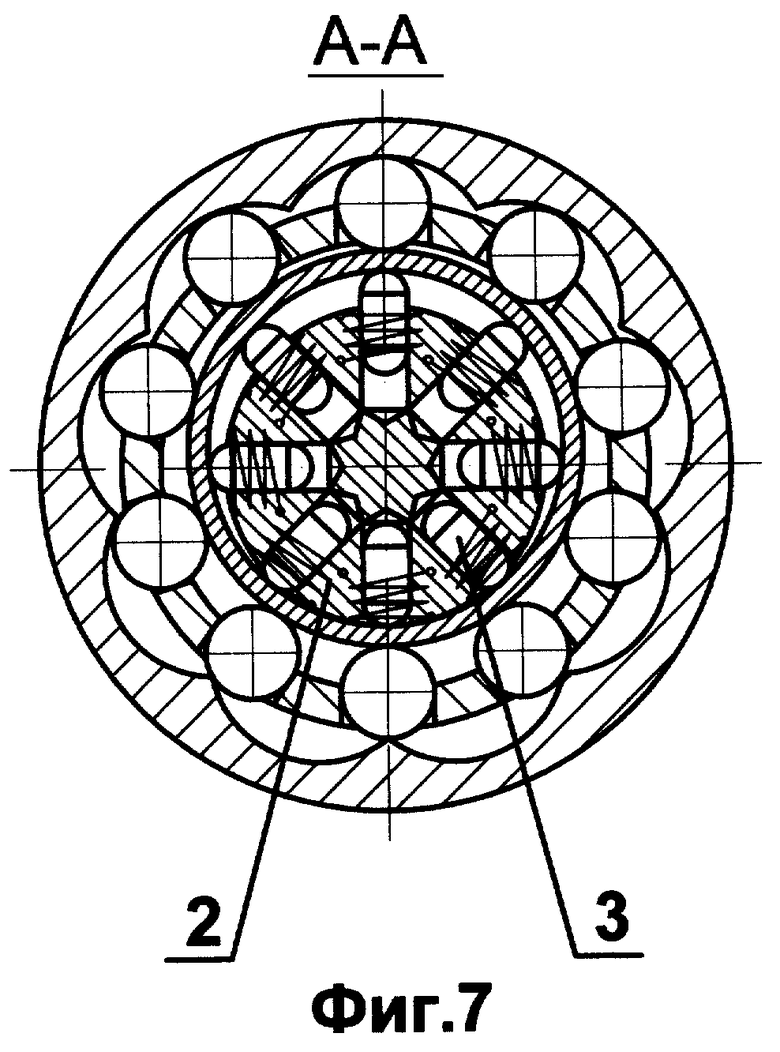
На фиг.7 представлен поперечный разрез электромагнитного волнообразователя исполнительного механизма.
Исполнительный механизм состоит из жесткого колеса 1, являющегося корпусом исполнительного механизма. Корпус исполнительного механизма 1 представляет собой полый цилиндр с прямыми проточками эпициклоидного профиля, расположенными на внутренней его поверхности. На внутренней торцевой поверхности корпуса исполнительного механизма 1 существует торцевой упор с концентрическими дорожками. Внутри корпуса исполнительного механизма 1, с противоположного торцевому упору торца, расположен соосно с корпусом блок цилиндров 2. Блок цилиндров 2 представляет собой цилиндр с равномерно по окружности в несколько рядов выполненными отверстиями для крепления с корпусом исполнительного механизма 1, одна торцевая поверхность представляет собой фланец. На фланцевой поверхности, обращенной внутрь корпуса, выполнены концентрические дорожки, аналогичные таковым в корпусе исполнительного механизма 1. В радиальных отверстиях блока цилиндров находятся толкатели 3, с возможностью совершать возвратно-поступательное движение в этих отверстиях, контактирующие с внутренней поверхностью тонкостенной обоймы 4, при этом торцевые поверхности толкателей 3, касающиеся внутренней поверхности обойм 4, выполнены сферическими, образуя с внутренней поверхностью обоймы 4 пару скольжения. Обойма 4 представляет собой тонкостенный цилиндр, расположенный с эксцентриситетом относительно блока цилиндров 2. Обойма 4 может совершать возвратно-поступательные движения относительно оси, перпендикулярной оси блока цилиндров 2, а также вращательное движение относительно собственной оси. Гибкое колесо состоит из сепаратора 5 и шариков 6. Сепаратор 5 представляет собой тонкостенный полый цилиндр, расположенный соосно внутри корпуса 1. В сепараторе 5 равномерно по окружности выполнено несколько рядов радиальных отверстий, в которых расположены шарики 6. Причем со стороны, обращенной к блоку цилиндров 2, ряды отверстий выполнены без углового смещения, а с противоположной стороны отверстия выполнены в три ряда с угловым смещением в 120°. Шарики 6 совершают в отверстиях сепаратора 5 возвратно-поступательное движение. Крайние ряды отверстий сепаратора 5 с обоих сторон выполнены таким образом, чтобы шарики опирались на концентрические дорожки корпуса 1 и блока цилиндров 2, образуя при этом опорное устройство, аналогичное упорному подшипнику качения. Сепаратор 5 внешней своей цилиндрической поверхностью касается вершин эпициклоидных проточек корпуса 1, образуя при этом пару скольжения. Сепаратор 5 может совершать вращательное движение относительно собственной оси. Со стороны блока цилиндров 2 шарики 6 контактируют с одной стороны с наружной поверхностью обоймы 4, а с другой - с внутренней поверхностью жесткого колеса 1. С противоположной стороны сепаратора 5, где ряды радиальных отверстий смещены относительно друг друга на угол 120°, шарики 6 контактируют с обной стороны с поверхностью выходного звена 7, а с другой - с внутренней поверхностью жесткого колеса 1. Выходное звено 7 представляет собой вал с внешней цилиндрической поверхностью с волнообразной образующей. При этом опорой выходного звена 7 являются шарики 6. Выходное звено 7 может совершать возвратно-поступательное движение, а также вращение относительно собственной оси. Длина периода волнообразной образующей выходного звена 7, а также количество проточек корпуса 1 определяет передаточное число исполнительного механизма.
Волнообразователь может быть выполнен гидравлическим или пневматическим, содержащим управляющий электродвигатель 8, закрепленный жестко на торцевой поверхности блока цилиндров 2, распределитель 9, закрепленный на валу управляющего электродвигателя 8. Блок цилиндров выполнен с отверстиями для гидромагистралей высокого и низкого давления соединенных с штуцерами 10, а также снабжен соосным отверстием для распределителя 9. Распределитель 9 представляет собой цилиндрический вал с концентрическими проточками по внешней цилиндрической поверхности. Проточки выполнены таким образом, чтобы попеременно соединять каналы гидромагистрали высокого и низкого давления с цилиндрами толкателей 3, выполненных в виде поршней. Штуцеры 10 закреплены на внешней фланцевой поверхности блока цилиндров 2.
Волнообразователь может быть выполнен эксцентриковым, содержащим приводной электродвигатель 11, закрепленный жестко на торцевой поверхности блока цилиндров 2, эксцентриковый вал 12, закрепленный на валу приводного электродвигателя 11. Блок цилиндров 2 снабжен соосным отверстием для эксцентрикового вала 12 диаметром, равным сумме диаметра эксцентрикового вала 12 и удвоенному эксцентриситету. Эксцентриковый вал 12 представляет собой цилиндр с отверстием под вал электродвигателя, расположенным с эксцентриситетом относительно оси цилиндра. Эксцентриковый вал 12 своей внешней поверхностью контактирует с толкателями 3. Поверхность толкателей 3, обращенная к эксцентриковому валу 12, выполнена сферической.
Волнообразователь может быть выполнен электромагнитным, содержащим толкатели 3, с обмотками электромагнитов 13, расположенными по окружности в блоке толкателей 2. Толкатели 3 представляют собой сердечники электромагнитов 13, расположенных равномерно по окружности в несколько рядов. Обмотки электромагнитов 13 подключены к коммутационному устройству 14. Коммутационное устройство 14 представляет собой логическое устройство, позволяющее коммутировать обмотки электромагнитов 13 с источником питания в зависимости от выбранного закона управления.
Работает исполнительный механизм следующим образом. Толкатели 3 волнообразователя передают движение обойме 4, которая, в свою очередь, заставляет шарики 6 в сепараторе 5 совершать возвратно-поступательные движения. Шарики 6 контактируют с внутренней поверхностью корпуса 1 и, надавливая на стенки отверстий сепаратора 5, заставляют его совершать вращательное движение вокруг своей оси. При этом скорость вращения сепаратора 5 определяется количеством аксиальных проточек корпуса 1 и скоростью перемещения обоймы 4. Шарики 6 с противоположной стороны сепаратора 5, расположенные рядами радиальных отверстий, смещенных относительно друг друга на угол 120°, под действием вращения сепаратора 5, совершают возвратно-поступательные движения в его отверстиях за счет контакта с внутренней эпициклоидной поверхностью корпуса 1. Другой стороной шарики 6 надавливают на внешнюю волновую поверхность выходного звена 7, заставляя ее перемещаться поступательно. При этом число шариков 6, расположенных в рядах радиальных отверстий сепаратора 5, смещенных относительно друг друга на угол 120°, определяется числом аксиальных проточек корпуса 1.
Волнообразователи работают следующим образом.
В исполнительном механизме с плунжерным гидравлическим (пневматическим) волнообразователем перемещение обойм 4 происходит за счет следующего. Вращение управляющего электродвигателя 8 с распределителем 9 приводит к изменению направления потока рабочей жидкости, под действием которой толкатели 3, находящиеся в магистрали нагнетания, двигают обойму 4.
В исполнительном механизме с эксцентриковым волнообразователем перемещение обойм 4 происходит за счет следующего. За счет вращения эксцентрикового вала 12, закрепленного на валу электродвигателя 11, толкатели 3, контактирующие с поверхностью эксцентрикового вала 12, совершают в отверстиях блока толкателей 2 возвратно-поступательное движение, передающееся обойме 4.
В исполнительном механизме с электромагнитным волнообразователем сигналы с распределителя 14 поступает на обмотки электромагнитов 13. Под действием электродвижущей силы толкатели 3 совершают в отверстиях блока толкателей 2 возвратно-поступательное движение, передающееся обойме 4.
Выполнение жесткого колеса 1 в виде полого цилиндра позволяет разместить волнообразователь внутри.
Волнообразователь, выполненный в виде распределителя 9, блока цилиндров, поршней 3 и тонкостенных обойм 4, позволяет снизить момент инерции быстро вращающихся частей волнообразователя и мощность управляющего двигателя, улучшая тем самым динамические характеристики исполнительного механизма.
Использование гидравлического или пневматического волнообразователя с маломощным управляющим электродвигателем 8 позволяет увеличить нагрузочную способность, уменьшить мощность, затрачиваемую на управление, и обеспечивать как аналоговое, так и шаговое управление при использовании шагового двигателя.
Использование эксцентрикового волнообразователя позволяет уменьшить момент инерции движущихся частей, а также обеспечить высокую жесткость и простоту конструкции.
При этом число цилиндров определяет нагрузочную способность, а число проточек жесткого колеса 1 и количество шариков в одном ряду - передаточное число от обоймы 4 к сепаратору. Передаточное же число от сепаратора к выходному звену определяется как отношение скорости вращения сепаратора к длине периода волнообразной образующей выходного звена.
Таким образом, по сравнению с прототипом предлагаемое изобретение позволяет расширить функциональные возможности исполнительного механизма за счет уменьшения момента инерции движущихся частей волнообразователя, а также использовать высокоскоростные двигатели, за счет большего передаточного отношения, также позволяет совместить функции преобразователя вращательного движения управляющего двигателя в поступательное выходных звеньев и силового двигателя при использовании гидравлического волнообразователя, при этом обеспечивая лучшие динамические характеристики.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ НА ОСНОВЕ ВОЛНОВОЙ ПЕРЕДАЧИ ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2003 |
|
RU2265146C2 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ НА ОСНОВЕ ВОЛНОВОЙ ПЕРЕДАЧИ | 2003 |
|
RU2253775C1 |
| ВОЛНОВОЙ РЕДУКТОР С ЭКСЦЕНТРИКОВЫМИ РОЛИКАМИ | 2012 |
|
RU2491455C1 |
| СИЛОВОЙ МИНИПРИВОД (ВАРИАНТЫ) | 2004 |
|
RU2281597C1 |
| СИЛОВОЙ МИНИ-ПРИВОД ПЕТЛЕОБРАЗНОЙ ФОРМЫ | 2012 |
|
RU2519612C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ МИНИ-ПРИВОД ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2012 |
|
RU2526366C2 |
| Блок рулевых приводов ракеты или снаряда | 2020 |
|
RU2740978C1 |
| МУЛЬТИПЛИКАТОР ВЫСОКОМОЩНОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2015 |
|
RU2588351C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РУЛЕВОГО ПРИВОДА | 2004 |
|
RU2265553C1 |
| СИЛОВОЙ МИНИ-ПРИВОД | 2007 |
|
RU2321138C1 |
Изобретение относится к машиностроению и предназначено для преобразования вращательного движения управляющего двигателя в поступательное движение выходного вала. Исполнительный механизм содержит корпус, волнообразователь, гибкое колесо, закрепленное в корпусе, жесткое колесо 1, выходное звено 7, расположенное соосно гибкому колесу и зацепляющееся с ним, опорное устройство, выполненное в виде шариков 6. Жесткое колесо является корпусом исполнительного механизма и выполнено с аксиальными проточками эпициклоидного профиля, расположенными на его внутренней поверхности. Волнообразователь снабжен толкателями 3 и обоймой 4. Гибкое колесо выполнено в виде подвижного сепаратора 5, в радиальных отверстиях которого расположены равномерно по окружности в несколько рядов шарики 6. Сепаратор 5 контактирует наружной поверхностью с жестким колесом, образуя пары скольжения. Выходное звено выполнено в виде штока, расположенного внутри сепаратора, снабженного по всей длине волнообразной наружной поверхностью. Толкатели 3 контактируют с внутренней поверхностью обоймы 4, представляющей собой полый тонкостенный цилиндр, и расположены равномерно по окружности в несколько рядов в радиальных отверстиях блока цилиндров 2, закрепленного жестко в корпусе. Технический результат - уменьшение момента инерции вращающихся частей и увеличение нагрузочной способности механизма. 3 з.п. ф-лы, 7 ил.
| Волновая винтовая передача | 1985 |
|
SU1352116A1 |
| Реверсивная волновая передача с подвижными зубьями | 1989 |
|
SU1700316A1 |
| Гидравлический исполнительный механизм | 1981 |
|
SU954667A1 |
| ВОЙ ВАРИАТОР СКОРОСТИ | 0 |
|
SU314945A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 0 |
|
SU291061A1 |

