Изобретение относится к машиностроению и может использоваться в устройствах для перекачивания жидкостей.
Известны роторно-пластинчатые (шиберные) насосы [1], содержащие цилиндрический корпус, в котором вращается барабан, имеющий осевой эксцентриситет с корпусом, и пластины, установленные в радиальных прорезях барабана, опирающиеся в процессе работы насоса на внутреннюю поверхность цилиндрического корпуса. Пластины скользят по корпусу в процессе работы насоса и отделяют переменные по величине зоны всасывания и нагнетания.
К недостаткам данных насосов относятся следующие:
- небольшая производительность;
- потери на трение от скольжения пластин по внутренней поверхности корпуса и быстрый износ их.
Известны также шестеренные насосы ([2] - прототип), содержащие корпус, рабочую камеру, профиль которой очерчен двумя дугами окружностей, центры которых совпадают с центрами вращения рабочих элементов, а расстояние между центрами равно сумме радиусов этих окружностей. Передача движения от ведущего элемента к ведомому осуществляется зубчатым зацеплением рабочих элементов - шестерен. Зона всасывания отделена от зоны нагнетания линиями контактов между зубьями в зубчатом зацеплении и зубьями с корпусом. Эти зоны постоянны по величине как при работе насоса, так и в состоянии покоя. Линии контактов между зубьями и корпусом (теоретически, при отсутствии зазора) представляют собой высшие кинематические пары скольжения. Форма отверстий всасывания и нагнетания не зависит от движения рабочих элементов и "живые" сечения их не перекрываются рабочими элементами. Корпус закрывается крышкой.
К недостаткам прототипа можно отнести:
- трудоемкость изготовления зубчатой передачи;
- потери, связанные с трением скольжения или зазором между рабочими элементами и профилем рабочей камеры;
- низкая производительность.
К техническому результату от использования предлагаемого изобретения относится увеличение производительности насоса при соизмеримых габаритах с прототипом, использование рабочих элементов менее трудоемких при изготовлении, уменьшение потерь, связанных с трением скольжения или ликвидацией радиального зазора между рабочими элементами и профилем рабочей камеры.
Указанный технический результат достигается тем, что в предлагаемом насосе В. Ф. Нефедова, содержащем корпус с всасывающим и нагнетательным отверстиями, крышку и рабочую камеру, в которой расположены ведущий и ведомый рабочие элементы, снабженные механизмом передачи движения от ведущего к ведомому рабочему элементу, и зоны всасывания и нагнетания, образованные наружными поверхностями рабочих элементов и профилем рабочей камеры, рабочая камера выполнена с профилем, очерченным дугами двух пересекающихся окружностей, ведущий и ведомый рабочие элементы выполнены в виде дисков, механизм передачи движения от ведущего к ведомому рабочему элементу выполнен как двухкривошипный антипараллелограмм, при этом центры вращения кривошипов антипараллелограмма совпадают с центрами дуг профиля рабочей камеры, диаметры рабочих элементов равны длине шатуна, длина кривошипа не более половины длины шатуна, а сумма длин обоих кривошипов и шатуна равна диаметру окружности, очерчивающей дуги профиля рабочей камеры. Зоны всасывания и нагнетания насоса переменны по величине, а его всасывающее и нагнетательное отверстия выполнены на торцевых стенках корпуса и крышки в области пересечения очерчивающих рабочую камеру окружностей.
Изобретение поясняется следующими чертежами.
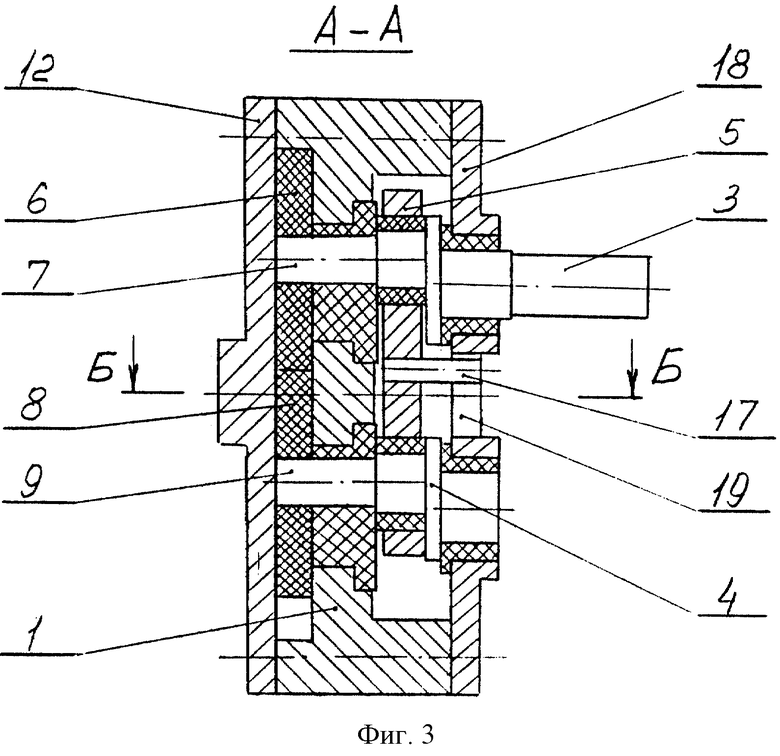
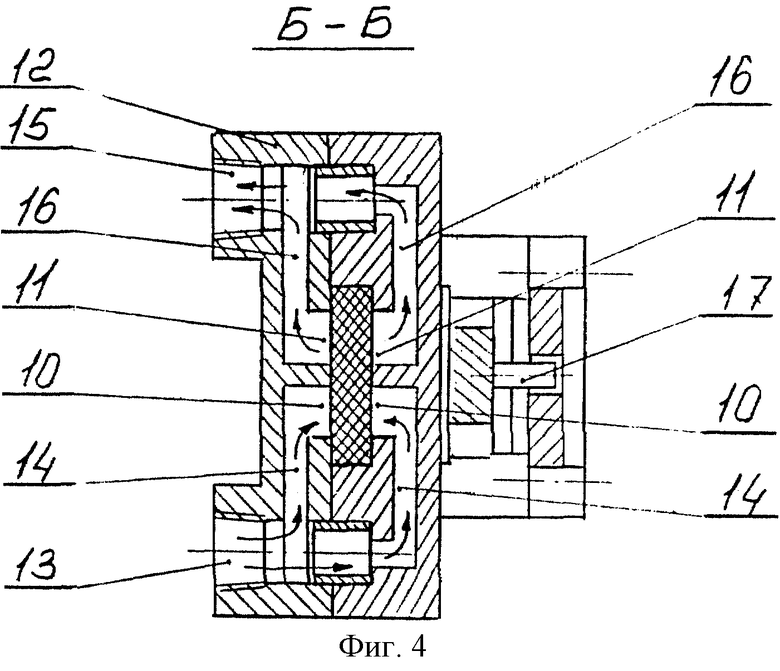
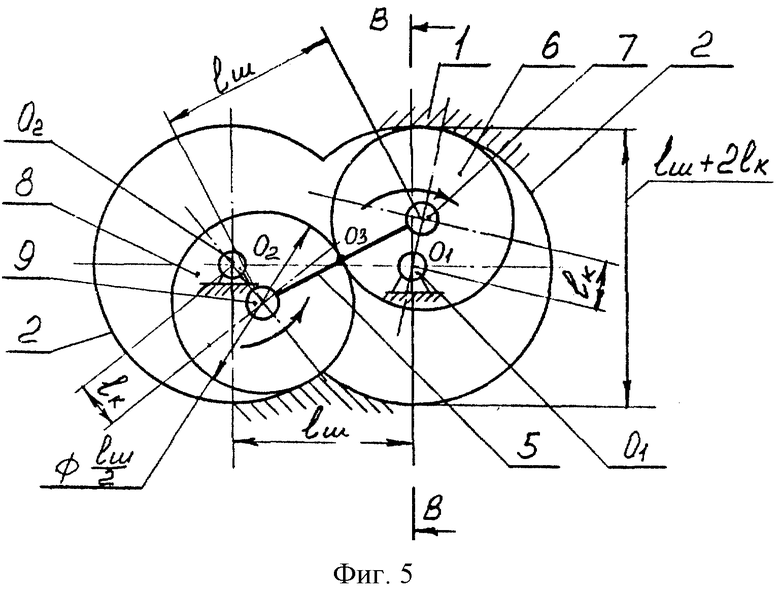
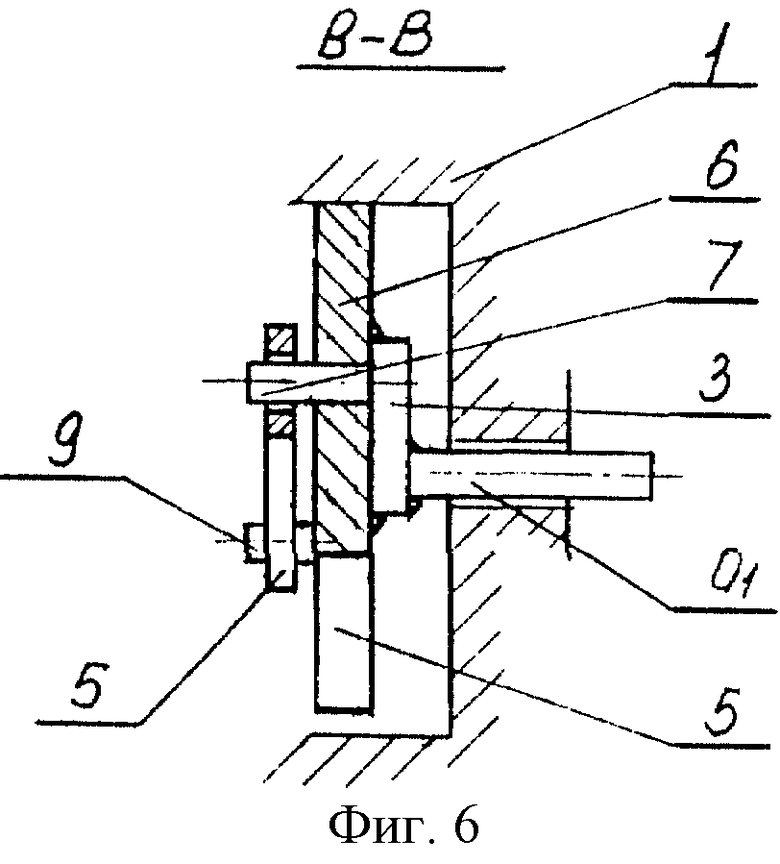
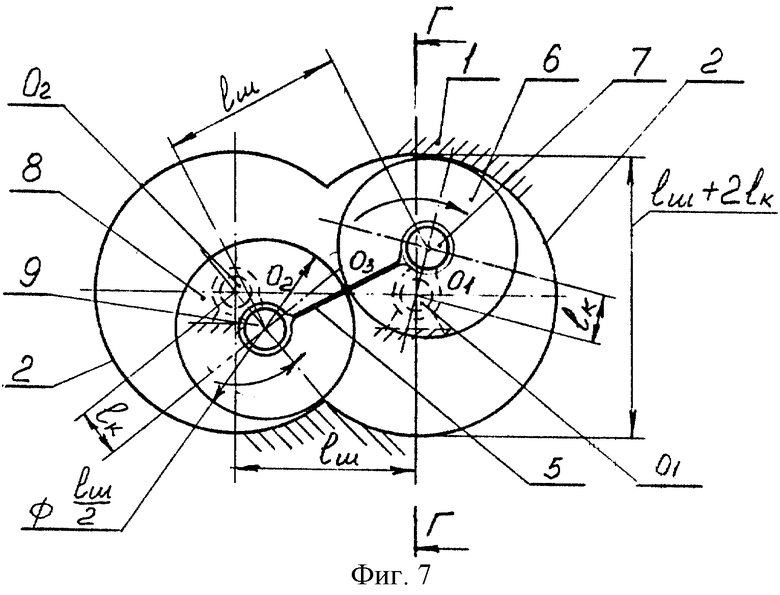
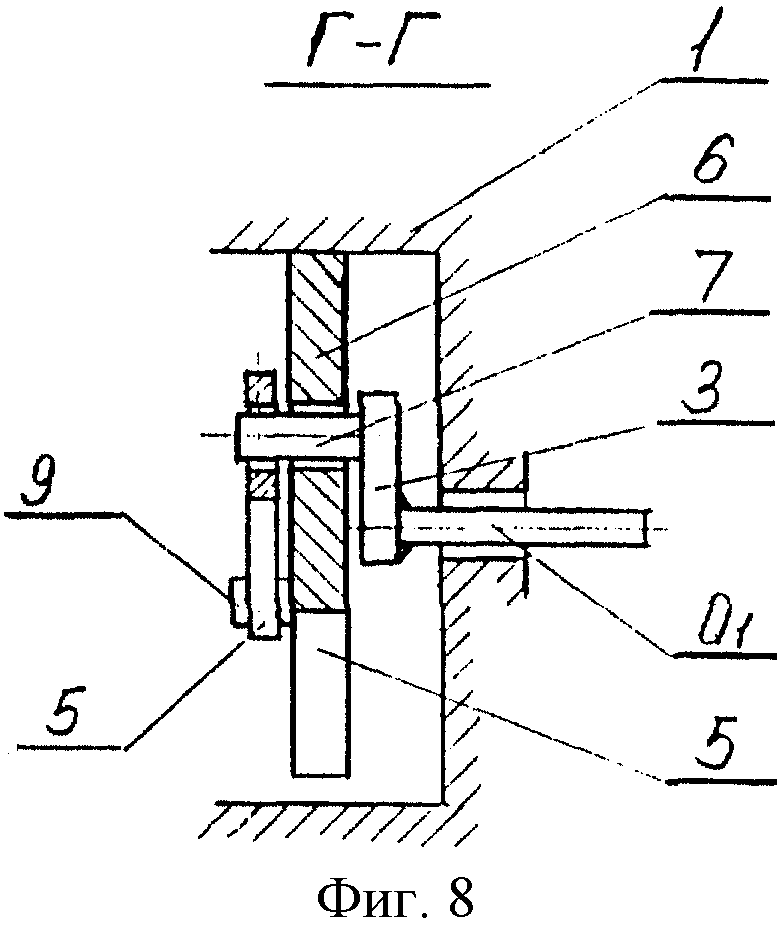
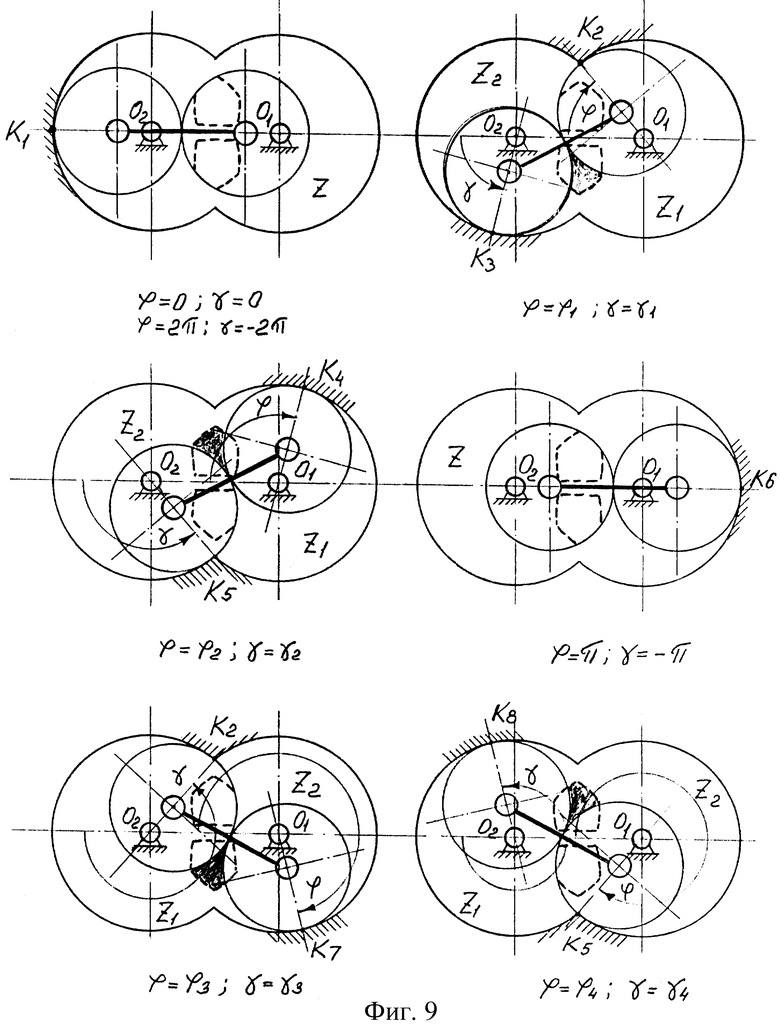
На фиг. 1 изображен общий вид насоса; на фиг. 2 - то же при снятой крышке насоса; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 3; кинематическая схема насоса с рабочими элементами, жестко связанными с кривошипами, изображена на фиг. 5; на фиг. 6 - разрез В-В на фиг. 5. Кинематическая схема насоса с рабочими элементами, свободно установленными на осях шарнира с шатуном, изображена на фиг. 7; на фиг. 8 - разрез Г-Г на фиг. 7; на фиг. 9 изображены последовательные положения рабочих элементов и механизма передачи движения при повороте ведущего кривошипа на один оборот ϕ = 0 до ϕ = 2π, на фиг. 10 изображена схема определения положения и границ отверстий всасывающего и нагнетательного.
Насос В. Ф. Нефедова содержит корпус 1, внутренняя поверхность которого образует рабочую камеру, очерченную дугами 2 пересекающихся окружностей с центрами O1 и O2 (фиг. 7 и 8), совпадающими с осями вращения ведущего 3 и ведомого 4 кривошипных валов (кривошипов) механизма передачи движения от ведущего рабочего элемента к ведомому, представляющего собой двухкривошипный антипараллелограмм. Механизм передачи движения от ведущего рабочего элемента к ведомому снабжен шатуном 5, ведущим рабочим элементом 6, выполненным в виде диска, свободно установленного на оси шарнира 7 с шатуном 5, а также ведомым рабочим элементом 8, выполненным в виде диска, свободно установленного на оси шарнира 9 с шатуном 5. Насос содержит всасывающее 10 и нагнетательное 11 отверстия, выполненные на торцевых стенках корпуса 1 и крышки 12, входное отверстие 13, соединенное с всасывающим отверстием 10 каналами 14, выполненными в корпусе и крышке, выходное отверстие 15, соединенное с нагнетательным отверстием 11 каналами 16, также выполненными в корпусе и крышке насоса. Для выхода двухкривошипного антипараллелограмма из "мертвых" положений (крайних положений) в шатун 5 запрессован штифт 17, а в кронштейне 18 выполнен профилированный паз 19.
Насос В.Ф. Нефедова работает следующим образом.
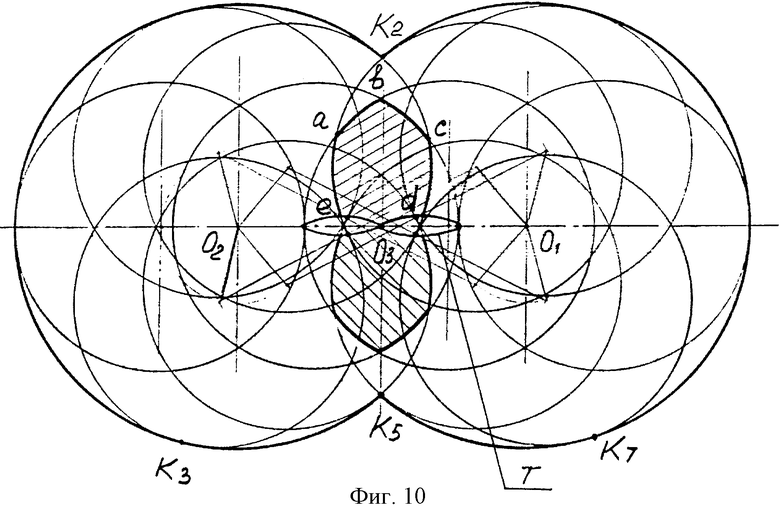
Равномерное вращение ведущего кривошипа 3 от внешнего привода (не показан) через шатун 5 передается ведомому кривошипу 4, который вращается неравномерно и в противоположную сторону относительно ведущего кривошипа. Шатун 5 производит сложное движение, его средняя точка O3 движется по восьмеркообразной траектории Т (фиг. 10), а оси шарниров 7, 9 движутся по окружностям с радиусами, равными длине кривошипа, рабочие элементы - диски 6, 8, свободно установленные на осях шарниров 7, 9, обкатываясь друг по другу, одновременно катятся по дугам 2 профиля рабочей камеры насоса, осуществляя беззазорный контакт рабочих элементов с профилем рабочей камеры, при этом трением движения будет трение качения, коэффициент которого значительно ниже, чем трение скольжения прототипа, что позволяет снизить потери на трении.
В начальном положении двухкривошипного антипараллелограмма (фиг. 9), характеризующимся крайним (левым) положением, когда угол поворота ведущего кривошипа ϕ = 0, угол поворота ведомого кривошипа, также равен нулю γ = 0. (Принято считать угол по часовой стрелке - положительный, против часовой стрелки - отрицательный). Рабочий элемент 6 ведущего кривошипа не имеет точек контакта с профилем рабочей камеры насоса, а рабочий элемент 8 ведомого кривошипа 4 имеет точку контакта К1. Профиль рабочей камеры и радиальная поверхность рабочих элементов образуют единую область Z, заполненную жидкостью или другим рабочим агентом, например воздухом. При повороте ведущего кривошипа 3 по часовой стрелке на угол ϕ = ϕ1 до соприкосновения его рабочего элемента 6 с профилем рабочей камеры (точка контакта К2) ведомый кривошип 4 повернется на угол γ = γ1 против часовой стрелки. Рабочий элемент 8 ведомого кривошипа 4 будет иметь точку контакта К3 при длине кривошипа меньше половины длины шатуна
lk < lш/2
или точку контакта К5 при длине кривошипа, равной половине длины шатуна
lk = lш/2,
в противном случае точки контакта не будет.
В дальнейшем описание работы насоса предполагает, что длина кривошипа менее половины длины шатуна.
При положении рабочих элементов в точках контакта К2-К3 единая область Z разделится на две: зону нагнетания Z1 и зону всасывания Z2. Жидкость, находящаяся в зоне Z1, через отверстие нагнетания 11 по каналам 16 будет поступать к выходному отверстию 15. При последующем повороте ведущего кривошипа 3 до угла ϕ = ϕ2 всасывающее отверстие 10 будет открываться, в зоне Z2 давление будет понижаться и вследствие этого жидкость извне через входное отверстие 13 по каналам 14 и всасывающее отверстие 10 будет поступать в зону рабочей камеры Z2, а из зоны Z1 будет нагнетаться через нагнетательное отверстие 11 по каналам 16 к выходному отверстию 15. В положении ведущего кривошипа ϕ = ϕ2, ведомый кривошип займет положение γ = γ2, рабочие элементы будут иметь точки контакта с профилем рабочей камеры К4-К5. В этом положении нагнетательное отверстие 11 перекроется и до поворота ведущего кривошипа на угол ϕ = π будет перекрыто, а всасывающее отверстие будет открыто и через него жидкость будет поступать из входного отверстия 15 по каналам 16 до тех пор, пока давление в полости Z2 не выровняется с входным давлением или пока всасывающее отверстие не перекроется при повороте ведущего кривошипа на угол ϕ = π, при этом ведомый повернется на угол γ = -π.
В положении ведущего кривошипа ϕ = π, а ведомого γ = -π, всасывающее 10 и нагнетательное 11 отверстия полностью перекрыты, области Z1 и Z2 объединятся в единую область Z, давление жидкости в рабочей камере выровняется. При дальнейшем повороте ведущего кривошипа до угла ϕ = ϕ3, ведомого - до угла γ = γ3 нагнетающее отверстие будет открываться, жидкость через нагнетательное отверстие по каналам будет поступать в выходное отверстие. Всасывающее отверстие до контакта ведомого рабочего элемента в точке К2, а ведущего в точке контакта К7 будет перекрыто.
В положении рабочих элементов в точках контакта К2-K7 при угле поворота ведущего кривошипа ϕ = ϕ3, ведомого γ = γ3 единая область Z разделится на две зоны: Z1 и Z2. До поворота ведущего кривошипа на угол ϕ = ϕ4, а ведомого на угол γ = γ4, жидкость будет поступать через нагнетательное отверстие на выход, а через открывающееся всасывающее отверстие извне в зону Z1.
В положении ϕ = 2π; γ = -2π зоны Z1 и Z2 объединятся в единую область Z, всасывающее и нагнетательное отверстия будут перекрыты. При следующем повороте ведущего кривошипа 3 на ϕ = 2π цикл повторится.
Границы отверстий всасывания и нагнетания определяются графически по схеме определения на фиг. 10, где дуги ab, bc (границы всасывающего отверстия) получаются как участки внешних окружностей рабочих элементов при положении двухкривошипного антипараллелограмма в крайних положениях; дуги ae, cd (границы всасывающего отверстия) получаются как участки внешних окружностей рабочих элементов, когда рабочие элементы имеют общие точки контакта с профилем рабочей камеры: для дуги ae - точки контакта К2 - К3, для дуги cd - точки контакта К2 - К7. Граница EO3d - является частью траектории, описываемой средней точкой шатуна О3 при полном повороте ведущего кривошипа.
Предлагаемый насос превосходит по производительности прототип, т.е.
Qp/Qш > 1,
где Qp - производительность предлагаемого насоса,
Qш - производительность шестеренного насоса (прототипа).
Qp=Sz • hp • np
Qш = Sш • hш • nш
где Sz - площадь единой области Z в предлагаемом насосе,
Sш - суммарная площадь зубчатых впадин в шестеренном насосе,
hpi, hш - толщина рабочих элементов,
npi, nш - количество оборотов в единицу времени.
При одинаковых количествах оборотов и равных толщинах рабочих элементов неравенство Qz/Qш > 1 равносильно неравенству Sz/Sш > 1, где Sш = 2πDim из известной формулы определения производительности шестеренного насоса (Башта Т.М. Машиностроительная гидравлика. Справочное пособие. - М.: Машгиз, 1963), где Di - диаметр делительной окружности шестерни, m - модуль зацепления.
В условиях соизмеримых конструктивных размеров сравниваемых насосов предположим, что:
- длина кривошипа равна половине длины шатуна lk = lш/2;
- диаметр рабочего элемента равен длине шатуна dg = lш;
- наружный диаметр шестерен равен диаметру пересекающихся окружностей, образующих дуги профиля рабочей камеры
DHш = lш + 2lk;
- число зубьев шестерни равно 10.
При таких исходных условиях
Sz = 4,525lш 2
Таким образом, производительность предлагаемого насоса значительно больше шестеренного при соизмеримых конструктивных размерах.
Возможны другие варианты выполнения рабочих элементов. На фиг. 5, 6 показан вариант жесткой связи рабочих элементов с кривошипом (можно жестко связать рабочие элементы с шатуном), при этом движение трения между рабочими элементами и профилем рабочей камеры будет трение скольжения, но конструкция насоса упростится, поскольку кривошип с жестко связанным с ним рабочим элементом можно выполнить как эксцентрик, а шатун с жестко связанным рабочим элементом - как шатун с развитыми шатунными головками. В этих случаях звенья двухкривошипного антипараллелограмма будут не только выполнять характерные для него функции, но одновременно будут являться рабочими элементами насоса. Исходя из этого можно выполнить насос трехкамерным, где в первой камере рабочие элементы свободно установлены на оси шарниров, во второй камере рабочим элементом будет являться шатун с развитыми головками, а в третьей камере эксцентрики. Камеры соединены каналами последовательно или параллельно с входными и выходными отверстиями.
Источники информации
1. Юдин А.П. Гидравлика, гидравлические машины и гидропривод. - М.: Высшая школа, 1965, с. 265, рис. 19.
2. То же, с. 267, рис. 19-3, 19-4, 19-5 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБЪЕМНЫЙ НАСОС | 2000 |
|
RU2188338C2 |
| Винтовая машина | 1976 |
|
SU785527A1 |
| ЛЕТУЧИЕ НОЖНИЦЫ ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ФАСОННЫХ ПРОФИЛЕЙ | 1966 |
|
SU186832A1 |
| ОДНОЦИЛИНДРОВЫЙ МНОГОПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ (ТОР БЛАТОВА) | 2008 |
|
RU2393361C2 |
| РОТОРНО-ПОРШНЕВОЙ НАСОС-КОМПРЕССОР | 2007 |
|
RU2357097C2 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ СИЛОВЫХ НАГРУЗОК | 1998 |
|
RU2127842C1 |
| ВИНТОВАЯ МАШИНА | 1972 |
|
SU333288A1 |
| ЭКСЦЕНТРИКОВЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ ИЛИ КОЛЕБАТЕЛЬНОЕ | 2007 |
|
RU2352839C1 |
| КОМПРЕССОР С ГИДРОЗАТВОРОМ | 2006 |
|
RU2316673C1 |
Изобретение относится к машиностроению и может быть использовано в устройствах для перекачивания жидкостей. Насос содержит корпус с всасывающим и нагнетательным отверстиями, крышку и рабочую камеру, в которой расположены ведущий и ведомый рабочие элементы, снабженные механизмом передачи движения от ведущего к ведомому рабочему элементу, а также зоны всасывания и нагнетания, образованные наружными поверхностями рабочих элементов и профилем рабочей камеры, причем новым является выполнение рабочей камеры с профилем, очерченным дугами двух пересекающихся окружностей, ведущий и ведомый рабочие элементы выполнены в виде дисков, механизм передачи движения от ведущего рабочего элемента к ведомому выполнен как двухкривошипный антипараллелограмм, центры вращения кривошипов антипараллелограмма совпадают с центрами дуг профиля рабочей камеры, диаметры рабочих элементов равны длине шатуна, длина кривошипов составляет не более длины шатуна, а сумма длин обоих кривошипов и шатуна равна диаметру окружности, очерчивающей дуги профиля рабочей камеры; зоны всасывания и нагнетания переменны по величине, а всасывающее и нагнетательное отверстия выполнены на торцевых стенках корпуса и крышки в области пересечения окружностей, очерчивающих рабочую камеру. Увеличивается производительность насоса, уменьшаются трудоемкость при его изготовлении и потери на трение. 10 ил.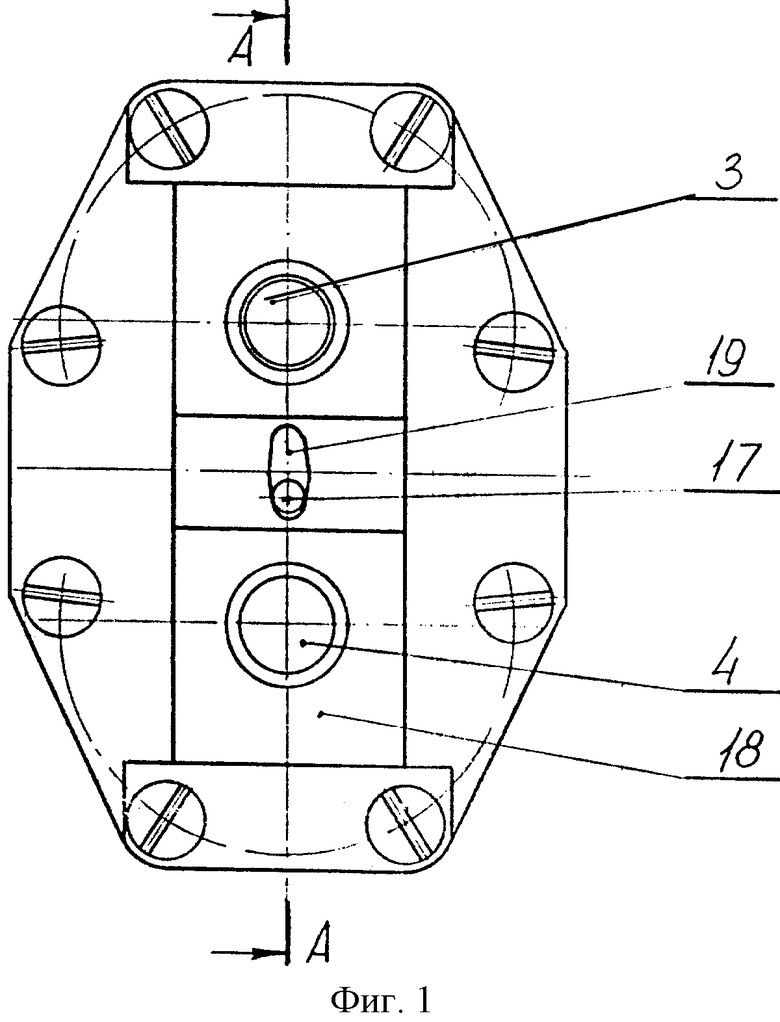
Насос, содержащий корпус с всасывающим и нагнетательным отверстиями, крышку и рабочую камеру, в которой расположены ведущий и ведомый рабочие элементы, снабженные механизмом передачи движения от ведущего к ведомому рабочему элементу, и зоны всасывания и нагнетания, образованные наружными поверхностями рабочих элементов и профилем рабочей камеры, отличающийся тем, что рабочая камера выполнена с профилем, очерченным дугами двух пересекающихся окружностей, ведущий и ведомый рабочие элементы выполнены в виде дисков, механизм передачи движения от ведущего рабочего элемента к ведомому выполнен как двухкривошипный антипараллелограмм с центрами вращения кривошипов, совпадающими с центрами дуг профиля рабочей камеры, при этом диаметры рабочих элементов равны длине шатуна, длина кривошипов составляет не более половины длины шатуна, сумма длин обоих кривошипов и шатуна равна диаметру окружности, очерчивающей дуги профиля рабочей камеры; зоны всасывания и нагнетания перемены по величине, а всасывающее и нагнетательное отверстия выполнены на торцевых стенках корпуса и крышки в области пересечения очерчивающих рабочую камеру окружностей.
| ЮДИН А.П | |||
| Гидравлика, гидравлические машины и гидропривод | |||
| - М.: Высшая школа, 1965, с | |||
| САННЫЙ ВЕЛОСИПЕД С ВЕДУЩИМ КОЛЕСОМ, СНАБЖЕННЫМ ШИПАМИ | 1921 |
|
SU265A1 |
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Тепловой измеритель силы тока | 1921 |
|
SU267A1 |
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Роторная машина | 1987 |
|
SU1742514A1 |
| Роторная машина | 1987 |
|
SU1541409A1 |
| Роторная машина | 1987 |
|
SU1423799A1 |
| US 4677950 A, 07.07.1987 | |||
| СПОСОБ И УСТАНОВКА ДЛЯ ОБРАБОТКИ БРЕВЕН | 2007 |
|
RU2412888C2 |

