Изобретение относится к области машиностроения, в частности к кривошипно-коромысловым механизмам, которые могут быть использованы в сельскохозяйственных, строительных, деревообрабатывающих машинах, в прессах, компрессорах, насосах и других устройствах. Преимущественно в составе механического оборудования, работающего при значительных силовых нагрузках. Кривошипно-коромысловые механизмы используются в качестве функционально-целевых механизмов. Но чаще применяются как базовые, на основе которых создаются многозвенные механизмы.
Известен, например, кривошипно коромысловый механизм, на базе которого построены двухцилиндровые компрессоры, двухпоршневые насосы и другие устройства с двумя выходными звеньями (исполнительными органами), поочередно совершающими рабочие ходы при прямом или при обратном ходах выходного звена базового механизма. Он представляет собой механизм, содержащий шарнирно связанные кривошип, шатун, коромысло и стойку, с коромыслом которого посредством двух промежуточных шатунов кинематически связаны поршни (исполнительные органы) [1].
Основным недостатком данного механизма в составе двухцилиндрового компрессора является недостаточно высокая его эффективность при передаче силовой нагрузки, равновеликой в интервалах прямого и обратного ходов коромысла. Это связано с завышением расхода мощности на процессы всасывания и нагнетания агента и динамической неадекватностью движений исполнительных органов в интервалах, соответствующих прямому и обратному ходу коромысла базового механизма. Объясняется это двумя факторами (причинами): во-первых, несоответствием переменной силовой работоспособности кривошипно-коромыслового механизма характеру изменения технологической нагрузки: во-вторых, различием в значениях силовой работоспособности кривошипно-коромыслового механизма в интервалах его прямого и обратного ходов. Первопричина наличия факторов, снижающих эффективность использования данного механизма в составе двухцилиндрового компрессора, заключается в следующем. Силовая работоспособность любого кривошипно-коромыслового механизма в периоде его кинематического цикла изменяется в зависимости от соотношения длин звеньев, при этом у подавляющего большинства механизмов силовая работоспособность в интервале обратного хода значительно ниже, чем в интервале прямого хода. При существующем многообразии коромысловых механизмов и определяющем влиянии геометрических параметров на их силовую работоспособность значительно усложнена возможность выбора механизма, оптимально соответствующего заданному силовому нагружению. Иными словами, существует неопределенность в оценке силовой работоспособности кривошипно-коромысловых механизмов, затрудняющая выбор предпочтительного механизма.
В данном многозвенном механизме оба хода (прямой и обратный) базового механизма являются рабочими ходами, т.е. кривошипно-коромысловый механизм не имеет холостых ходов. При этом технологическая нагрузка при прямом и обратном ходах оказывается возрастающей по величине и равновеликой, поскольку при прямом ходе один поршень выполняет операцию нагнетания, другой - операцию всасывания агента, а при обратном ходе функции поршней меняются на противоположные (поршень, который нагнетал агент, будет выполнять операцию всасывания, а другой поршень, который всасывал агент, операцию нагнетания).
Аналогичный характер силового нагружения имеют кривошипно-коромысловые механизмы, используемые в качестве базовых в составе однопоршневых насосов двойного действия [2]. Такой механизм содержит базовый кривошипно-коромысловый механизм, с коромыслом которого посредством промежуточного шатуна кинематически связан поршень, размещенный в цилиндре с двумя рабочими полостями, каждая из которых снабжена нагнетательным и всасывающим клапаном. В данном механизме равновеликая в интервалах прямого и обратного хода технологическая нагрузка реализуется при неравной силовой работоспособности кривошипно-коромыслового механизма в указанных интервалах. Это приводит к динамической неадекватности движений поршня в интервалах цикла (вызывающей вибрации) и завышению расхода мощности на процессы нагнетания и всасывания.
Известно, что силовая работоспособность кривошипно-коромыслового механизма в любом из его положений определяется величиной угла передачи, который обеспечивается при текущем положении звеньев. Для преодоления приложенной к коромыслу механизма технологической нагрузки шатун механизма соответственно должен быть нагружен движущей силой
S = QП.С/sinμ ,
где S - сила в шатуне, необходимая для движения нагруженного коромысла;
Qп.с. - сила полезного сопротивления (технологическая нагрузка), приложенная к коромыслу;
μ - угол передачи.
Следовательно, при любом значении силы полезного сопротивления уменьшение угла передачи приводит к необходимости увеличения силы S в шатуне, т. е. к необходимости увеличения движущего момента на валу кривошипа и к росту расхода мощности на реализацию процесса. Для обеспечения работы механизма при значениях силы S в шатуне, мало отличающихся от значений силы Qп.с, необходимо обеспечить условия, при которых характер изменения силовой работоспособности, т. е. характер изменения угла передачи будет соответствовать изменению прилагаемой к коромыслу механизма силы полезного сопротивления.
Силовая работоспособность кривошипно-коромыслового механизма, т.е. функция его угла передачи μ = f(ϕ), может соответствовать его технологической нагрузке QП.С= f(ϕ) лишь при вполне определенных соотношениях длин его звеньев. Здесь ϕ - текущий угол поворота ведущего звена (кривошипа) кривошипно-коромыслового механизма. Примечательно, что такое соответствие может быть достигнуто только за счет изменения функции μ = f(ϕ), поскольку функцию QП.С= f(ϕ) изменять нельзя, так как она определяется величиной технологических усилий. Очевидно, что степень (полнота) соответствия указанных функций зависит также от закона изменения силы Qп.с, так как характер изменения последней определяет собой возможность или невозможность достижения такого соответствия.
Поскольку силовая работоспособность в интервалах прямого и обратного ходов базового механизма оказывается различной, а технологические усилия, действующие на поршни, одинаковыми, работа многозвенника, построенного на базе кривошипно-коромыслового механизма, сопровождается изменениями движущегося момента на валу кривошипа и соответственно изменениями частоты вращения вала.
Таким образом, несоответствие силовой работоспособности базового механизма характеру технологической нагрузки и разная его силовая работоспособность в интервалах прямого и обратного ходов приводят при передаче равновеликой (равной по величине и характеру изменения) технологической нагрузки к завышению расхода мощности на реализацию процесса и ухудшению динамики функционирования многозвенника.
Практическая возможность эффективной передачи нагрузок, равновеликих в интервалах прямого и обратного ходов, базовыми кривошипно-коромысловыми механизмами основана на соответствующем повышении силовой работоспособности последних.
Задачей настоящего изобретения является повышение эффективности за счет уменьшения расхода мощности при передаче механизмом равновеликих силовых нагрузок в интервалах прямого и обратного ходов.
Решение поставленной задачи достигается тем, что в механизме для передачи силовых нагрузок, например, равновеликих в интервалах прямого и обратного хода, содержащем шарнирно связанные кривошип, шатун, коромысло и стойку, соотношение длин звеньев соответствует выражению
1 + λ
где λ1= r/d относительная длина кривошипа;
λ2= D/d относительная длина шатуна;
λ3= b/d относительная длина коромысла;
r, L, b - соответственно длина кривошипа, шатуна, коромысла;
d - длина стойки (расстояние между центрами вращения кривошипа и качания коромысла).
При этом относительные длины кривошипа, шатуна и коромысла могут изменяться в пределах, определенных выражением
0 < λ2; λ2; λ3≤ 1,0.
Заявляемый механизм отличается от прототипа значениями геометрических параметров, т.е. такими значениями длин звеньев в указанных пределах их изменения, при которых гарантировано выполняется равенство (1). Кроме того, предложенный механизм отличается текущими положениями звеньев в интервале цикла, при которых обеспечиваются большие численные значения углов передачи, т.е. большая силовая работоспособность по сравнению с прототипом.
Механизм, удовлетворяющий равенству (1), имеет одинаковую силовую работоспособность в интервалах прямого и обратного ходов. Иными словами, функции углов передачи в интервалах ходов механизма являются равновеликими (по величине углов и их приращению), при этом максимумы функций расположены внутри интервалов. Такой характер изменения углов в периоде кинематического цикла механизма оказывается благоприятным для передачи при прямом и обратном ходах коромысла равновеликой технологической нагрузки. Практически важно, что варьируя длины звеньев в соответствии с равенством (1), можно иметь функции углов передачи при больших или меньших значениях ординат. Этим обеспечивается возможность выбора механизма предпочтительного с учетом абсолютных значений величины передаваемой силовой загрузки.
Таким образом, выражение (1) определяет геометрические параметры механизма, который может обеспечить при прямом и обратном ходах коромысла передачу равновеликой силовой нагрузки при значениях движущей силы, мало отличающихся от силы полезного сопротивления. Это способствует выравниванию движущего момента на валу кривошипа и уменьшению расхода мощности на реализацию процесса, т.е. повышению эффективности работы двухцилиндрового компрессора.
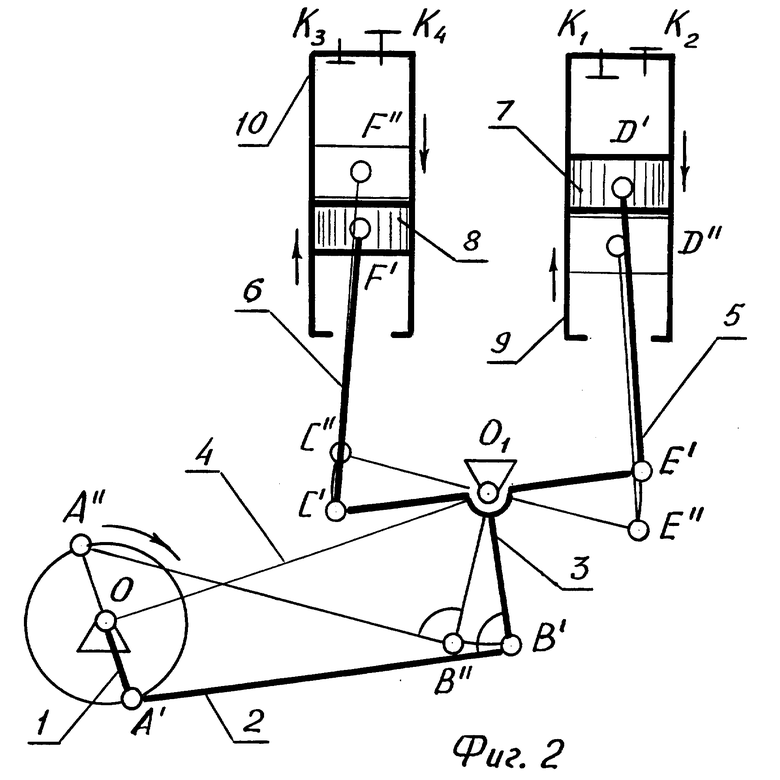
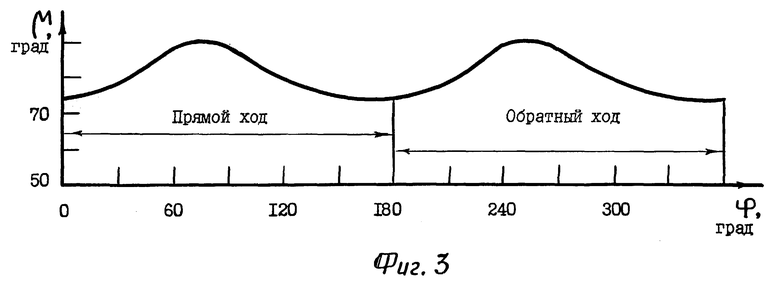
На фиг. 1 механизм в составе двухцилиндрового компрессора представлен в крайних положениях OA1B1O1C1E1D1F1 и OA2B2O1C2E2D2F2; на фиг.2 - то же, в положениях OA'B'O1C'E'D'F' и OA''B''O1C''E''D''F'', соответствующих максимальным значениям угла передачи при прямом и обратном ходах коромысла; на фиг. 3 - график изменения угла передачи за период кинематического цикла, т. е. за один оборот кривошипа, для механизма, соответствующего равенству (1) при λ1= 0,1 , λ2= 0,944 и λ3= 0,344 с абсолютными значениями длин звеньев, мм:
r = 25; l = 236; b = 86; d = 250.
Механизм для передачи силовых нагрузок содержит шарнирно связанные кривошип 1, шатун 2, коромысло 3 и стойку 4, при этом длины звеньев соответствуют выражению (1). С коромыслом 3 посредством промежуточных шатунов 5 и 6 кинематически связаны поршни 7 и 8, размещенные соответственно в цилиндрах 9 и 10, рабочая полость каждого из которых снабжена всасывающим и нагнетательным клапанами. Здесь K1 и K3- всасывающие клапаны, а K2 и K4- нагнетательные клапаны.
Кривошипно-коромысловый механизм в составе двухцилиндрового компрессора работает следующим образом.
При вращении кривошипа 1 коромысло 3 совершает возвратно-поворотное движение, в результате чего кинематически связанные с коромыслом поршни 7 и 8 выполняют совмещенные во времени возвратно-поступательные движения, при этом поршни выполняют рабочие ходы поочередно: один из поршней совершает рабочие ходы в интервале прямых кодов коромысла базового механизма, другой - в интервале обратных ходов коромысла. При рабочем ходе любого из поршней действует соответствующая пара нагнетательного и всасывающего клапанов. Так, при рабочем ходе поршня 7 всасывающий клапан K1 изолирует рабочую полость цилиндра 9 от линии, из которой ведется всасывание, а нагнетательный клапан K2 соединяют рабочую полость с линией, в которую ведется нагнетание агента. При рабочем ходе поршня 7 поршень 8 совершает свой холостой ход, при этом всасывающий клапан K3 будет открыт, а нагнетательный клапан K4 - закрыт.
Во второй половине периода кинематического цикла базового механизма поршень 8 будет выполнять рабочий ход, а поршень 7 - холостой, при этом соответственно меняются действия (положения) всасывающих и нагнетательных клапанов. Технологическую нагрузку на базовый механизм при прямом и обратном ходах его коромысла 3 генерируют оба поршня: поршень, совершающий рабочий ход, передает нагрузку, вызванную сжатием агента (большая составляющая общей нагрузки), а поршень, совершающий холостой ход, передает нагрузку, вызванную всасыванием агента (меньшая составляющая общей нагрузки). Сопротивление, оказываемое технологической нагрузкой движению коромысла, преодолевается развиваемой в шатуне 2 необходимой движущей силой. При этом, поскольку в интервалах прямого и обратного ходов на коромысло 3 действует одинаковая (равновеликая) технологическая нагрузка, а силовая работоспособность базового механизма в указанных интервалах также является равновеликой, передача сил в периоде кинематического цикла происходит при значениях движущей силы в шатуне, мало отличающихся от значений общей силы полезного сопротивления.
Выполнение длин звеньев механизма в соответствии с равенством (1) позволяет повысить эффективность его работы при передаче силовых нагрузок, равновеликих в интервалах прямого и обратного ходов коромысла.
Источники информации, принятые во внимание при составлении заявки
1. Антовиль А.И. Теория механизмов и машин. - М.: Высшая школа, 1961, - с. 15, рис. 1.5.
2. Шлипченко З. С. Насосы, компрессоры, вентиляторы. - Киев: Техника, 1976. - с. 258 - 259, рис. 135.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ СИЛОВЫХ НАГРУЗОК | 1998 |
|
RU2141586C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ ПЕРЕМЕННЫХ НАГРУЗОК | 1996 |
|
RU2114348C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ ПЕРЕМЕННЫХ СИЛОВЫХ НАГРУЗОК | 1998 |
|
RU2141587C1 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ СИЛОВЫХ НАГРУЗОК | 1999 |
|
RU2157934C2 |
| МЕХАНИЗМ ДЛЯ ПЕРЕДАЧИ СИЛОВЫХ НАГРУЗОК | 1998 |
|
RU2127383C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2005 |
|
RU2284262C1 |
| МАШИНА ДЛЯ УКЛАДКИ В ТАРУ ШТУЧНЫХ ИЗДЕЛИЙ | 1993 |
|
RU2085451C1 |
| УСТРОЙСТВО ДЛЯ НАПОЛНЕНИЯ БАНОК ПРОДУКТОМ | 1999 |
|
RU2165874C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2193963C1 |
Механизм относится к кривошипно-коромысловым механизмам, применяемым в качестве базовых для получения многозвенных механизмов, предназначенных для передачи значительных силовых нагрузок, равновеликих в интервалах прямых и обратных ходов коромысла. Механизм содержит шарнирно связанные кривошип, шатун, коромысло и стойку. С коромыслом посредством промежуточных шатунов кинематически связаны поршни, размещенные в цилиндрах, рабочая полость каждого из которых снабжена всасывающим и нагнетательным клапанами. Длины звеньев механизма удовлетворяют выражения 1 + λ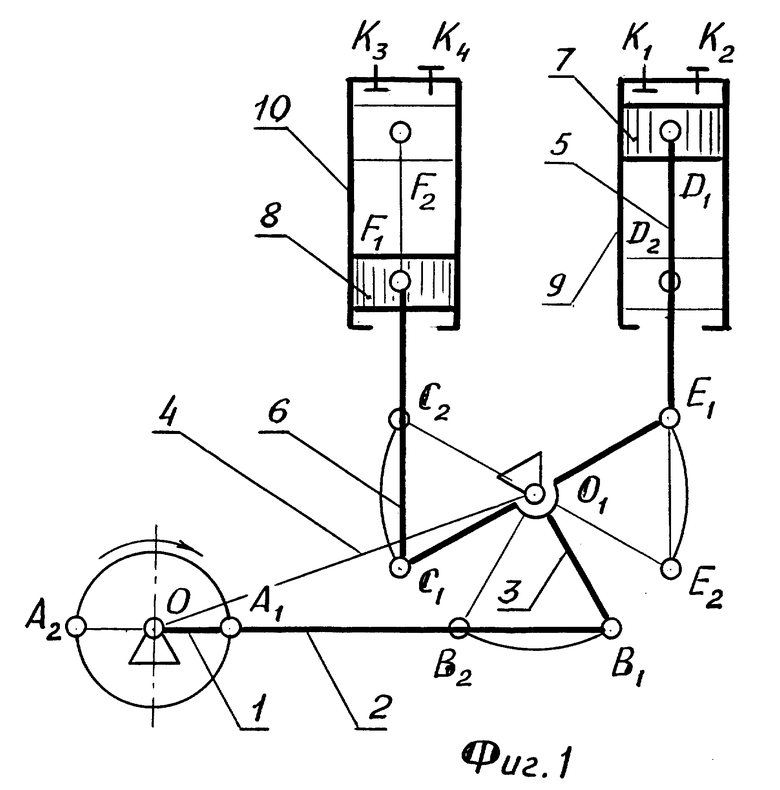
1+λ
где λ1= r/d - относительная длина кривошипа;
λ2= l/d - относительная длина шатуна;
λ3= b/d - относительная длина коромысла;
r, l, b - соответственно длина кривошипа, шатуна, коромысла,
d - длина стойки: расстояние между центрами вращения кривошипа и качания коромысла.
| Антовиль А.М | |||
| Теория механизмов и машин | |||
| - М.: Высшая школа, 1961, с.15, рис.1.5 | |||
| ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННЫЙ МЕХАНИЗМ ЯРИМОВА | 1992 |
|
RU2073803C1 |
| ЧЕТЫРЕХЗВЕННЫЙ ШАРНИРНЫЙ КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ ЯРИМОВА | 1991 |
|
RU2043550C1 |
| Шарнирный кривошипно-коромысловый механизм | 1984 |
|
SU1208381A1 |
| Кривошипно-коромысловый механизм | 1986 |
|
SU1397651A1 |
