Изобретение относится к области точного приборостроения, преимущественно гироскопического, и может быть использовано при создании гирокомпасов и курсоуказывающих устройств аналитического типа.
Известен способ определения истинного курса с помощью гироскопического датчика угловой скорости (см., например, книгу Б.И. Назарова и Г.А. Хлебникова "Гиростабилизаторы ракет" М., 1975, стр.193-196), согласно которому курсовое направление горизонтально расположенной измерительной оси гироскопа определяют аналитически путем вычислений по результатам измерений горизонтальной составляющей угловой скорости вращения Земли.
С целью повышения точности определения курса применяют методы, направленные на уменьшение влияния дрейфа гироскопа. Так гироскопический датчик угловой скорости, измерительная ось которого расположена в плоскости горизонта, поворачивают на разные азимутальные углы и снимают на этих углах выходную информацию с гироскопа в виде электрического напряжения с эталонного сопротивления, стоящего в цепи обратной связи.
На основе того, что ряд моментов гироскопа, не связанных с его корпусом, меняют знак при разворотах его в азимуте, разработаны известные методы, которые позволяют выполнить взаимную компенсацию вредных моментов. Однако эти известные методы автокомпенсации не позволяют полностью исключить погрешность определения курса от вредных моментов гироскопа, а также от других источников, например, невыставки осей чувствительности в горизонт.
За прототип взят способ определения истинного курса с помощью гироскопического датчика угловой скорости, основанный на его аналитическом вычислении (см. статью V.L. Budkin, S.P. Rеdkin "Gyrocompassing on a Movable Object by Means of Angular Rate Sensor on the Basis of Dynamically Tuned Gyro". Second International Symposium on Inertial Technology in Beijing. Beijing, China, October, 1988, pp. 143-151).
В этом способе проводят гирокомпасирование с применением датчика угловой скорости на основе динамически настраиваемого гироскопа (ДУС-ДНГ) при бесплатформенной установке его на объекте. Предварительно привязывают измерительные оси гироскопа к осям, связанным с объектом, согласовывают знаки изменения напряжений с эталонных сопротивлений гироскопа с направлением азимутального поворота его корпуса вокруг оси собственного вращения, определяют коэффициенты модели дрейфа гироскопа, широту местоположения объекта, углы наклона плоскости измерительных осей гироскопа по тангажу и крену, измеряют напряжения с эталонных сопротивлений гироскопа, работающего в режиме датчика угловой скорости, а затем азимутальный угол объекта определяют с помощью выражения
где U11, U12 - напряжения с эталонных сопротивлений гироскопа соответственно по первому и второму каналам,
Кн11, Кн12 - крутизна гироскопа по напряжению по первому и второму каналам,
Ω - угловая скорость вращения Земли,
ϕ - широта местоположения объекта,
υ,γ - углы наклона плоскости осей чувствительности гироскопа соответственно по тангажу и крену,
ω
В известном способе производится аналитическая компенсация дрейфа гироскопа. Для этого дрейф гироскопа может быть представлен в виде математической модели. При изодромной обратной связи гироскопа в установившемся режиме стационарную модель дрейфа гироскопа можно представить в виде

где fx, fy, fz - составляющие удельной силы вдоль положительных направлений осей, связанных с гироскопом,
ω
ω - коэффициенты модели дрейфа, пропорциональные ускорению во второй степени.
- коэффициенты модели дрейфа, пропорциональные ускорению во второй степени.
Для неподвижного объекта уравнения (2) могут быть выражены через составляющие ускорения силы тяжести путем подстановки
fx=gx, fy=gy, fz=gz. (3)
Для точной аналитической компенсации дрейфа необходимо точное знание коэффициентов модели дрейфа, которые определяются предварительно в результате калибровочных испытаний гироскопа. Однако часть этих коэффициентов является нестабильной от запуска к запуску, а также изменяется в процессе временной наработки прибора, что обуславливает погрешность гирокомпасирования. Одними из наиболее изменяющихся коэффициентов являются коэффициенты ω
Техническим результатом, который может быть получен при осуществлении настоящего изобретения, является повышение точности гирокомпасирования с применением гироскопического датчика угловой скорости.
Технический результат достигается тем, что в известном способе гирокомпасирования с применением датчика угловой скорости, включающем предварительную привязку плоскости измерительных осей гироскопа и оси собственного вращения к осям, связанным с объектом, согласование знаков изменения напряжений с эталонных сопротивлений гироскопа с направлением азимутального поворота его корпуса вокруг оси собственного вращения, определение коэффициентов модели дрейфа гироскопа, широты местоположения объекта, углов наклона плоскости измерительных осей гироскопа по тангажу и крену, дополнительно при гирокомпасировании проводят автокомпенсацию дрейфа гироскопа, не зависящего от ускорения, пропорционального ускорению вдоль оси собственного вращения, пропорционального второй степени ускорения вдоль осей гироскопа, от совместного действия ускорений по измерительным осям гироскопа, для чего совмещают измерительную ось первого канала гироскопа с продольной осью объекта и измеряют в этом первом положении напряжения с эталонных сопротивлений его двух каналов, после этого поворачивают гироскоп вокруг оси собственного вращения на 180 градусов относительно первого положения и в этом втором положении измеряют напряжения с эталонных сопротивлений каналов гироскопа, находят разность измеренных напряжений по двум каналам в этих положениях, а затем вычисляют значение угла истинного курса, компенсируя алгоритмически оставшуюся часть дрейфа гироскопа, по следующей формуле
к=2π-arctg (b1b2 -1), если b1>0, b2>0;
к=π-arctg (b1b2 -1), если b1>0, b2<0;
к=π-arctg (b1b2 -1), если b1<0, b2<0;
к=-arctg (b1b2 -1), если b1<0, b2>0; (4)
где
Δω
ω - коэффициенты модели дрейфа, пропорциональные ускорению во второй степени,
- коэффициенты модели дрейфа, пропорциональные ускорению во второй степени,
U111, U121 - напряжения с эталонных сопротивлений датчика угловой скорости соответственно по первому и второму каналам в исходном положении,
U112, U122 - напряжения с эталонных сопротивлений датчика угловой скорости соответственно по первому и второму каналам в положении после поворота гироскопа на 180 градусов,
Кн11, Кн12 - крутизна гироскопа по напряжению по первому и второму каналам,
υ, γ - углы наклона плоскости осей чувствительности гироскопа соответственно по тангажу и крену,
Ω - угловая скорость вращения Земли,
ϕ - широта местоположения объекта.
Рассмотрим схему аналитического гирокомпаса с применением гироскопического датчика угловой скорости, представленную на фиг.1. В гирокомпасе используется динамически настраиваемый гироскоп 1 (ДНГ). ДНГ установлен на поворотную платформу 2 устройства позиционирования гироскопа, реализующего повороты на заданные углы вокруг оси собственного вращения гироскопа. Устройство позиционирования имеет двигатель 3 и датчик угла 7 и обеспечивает повороты гироскопа на угол δ. На корпусе гироблока гирокомпаса установлены три акселерометра 4, 5, 6 для определения углов υ,γ наклона плоскости измерительных осей гироскопа по тангажу и крену. Гирокомпасированием определяется астрономический азимут входящей нормали оптического элемента 8, размещенного на корпусе гироблока компаса. Блок электроники 6 включает сервисную электронику гироскопа, акселерометров, устройства позиционирования и электронику измерения и обработки информации. Рассмотрим систему координат Хд Yд Zд, которая является географической. Ось Хд направлена на север, ось Yд - вертикально вверх, а ось Zд - на восток. В системе координат Хд Yд Zд проекциями угловой скорости Земли Ω являются: горизонтальная составляющая Ωcosϕ, направленная на север, и вертикальная составляющая Ωsinϕ, где ϕ - угол широты места. С гироскопом свяжем систему координат Хr1 Yr1 Zr1. Ось Xr1 направлена по оси чувствительности второго канала гироскопа, ось Yr1 - по оси чувствительности первого канала, а ось Zr1 - по оси собственного вращения. Систему координат Хс Yc Zc свяжем с объектом. Ось Хс направлена вдоль продольной оси объекта, ось Yc перпендикулярна оси Yc и располагается в плоскости симметрии объекта, ось Zc - перпендикулярна этой плоскости.
Входящая нормаль оптического элемента привязана к осям чувствительности гироскопа. При установке гирокомпаса на объект и привязки входящей нормали оптического элемента к его продольной оси, с помощью компаса возможно определение угла истинного курса объекта.
В исходном положении 1 гироскопа при δ = 0 в установившемся режиме для изодромной обратной связи напряжения с эталонных сопротивлений датчика угловой скорости можно представить в следующем виде
U111 = K
U121 = K
где
ω

a1x1 = gsinγcosυ,
a1y1 = -gsinυ,
a1z1 = -gcosγcosυ.
При повороте корпуса гироскопа вокруг оси собственного вращения на угол δ= 180 градусов относительно исходного положения показания гироскопа можно представить в виде
U112 = K
U122 = K
Проекции абсолютной угловой скорости на входные оси гироскопа в этом положении 2 имеют вид
ω
ω
Вредные моменты, действующие в положении 2 по осям гироскопа, можно записать в виде

a1x2 = -gsinγcosυ,
a1y2 = gsinυ,
a1z2 = -gcosγcosυ.
Вычитая из выражения (5) выражение (6), получим
U111-U112 = K
U121-U122 = K
где
ω
ω
Из выражения (7) видно, что вычитанием из показаний гироскопа в положении 1 показаний в положении 2 удалось скомпенсировать, с точностью до стабильности в этих положениях моментных коэффициентов, следующие моменты:
- моменты M
- моменты M
- моменты M
- моменты M
- моменты M
Практически изменение коэффициентных моментов мало при переводе гироскопа из одного положения в другое. С учетом этого величинами ΔM
С учетом (5), (10) уравнение (7) представим в виде
t11cosψ+t12sinψ = r1,
t21cosψ+t22sinψ = r2, (11)
где
t11 = 2Ωcosϕ•cosυ,
t12 = 0,
t21 = 2Ωcosϕsinγsinυ,
t22 = 2Ωcosϕcosγ,
r1 = (U111-U112)Kн11+Δω
r2 = -(U121-U122)Kн12+Δω
Решая уравнение (11), получим

Используя (12), искомый азимутальный угол ψ определим в следующем виде
При использовании функции тангенса квадрант, в котором расположен азимутальный угол ψ, может быть вычислен по соотношению знаков b1, b2. Зная квадрант, формулу для вычисления угла истинного курса можно представить в виде
к = 2π-arctg (b1b2 -1), если b1>0, b2>0;
к = π-arctg (b1b2 -1), если b1>0, b2<0;
к =π-arctg (b1b2 -1), если b1<0, b2<0;
к = -arctg (b1b2 -1), если b1<0, b2>0;
Таким образом, предлагаемый способ гирокомпасирования с применением датчика угловой скорости и комбинированной компенсации его дрейфа имеет следующие отличия от известного способа:
- в предварительной операции по определению коэффициентов модели дрейфа гироскопа не требуется определение всех известных коэффициентов модели дрейфа, так как используется принцип автокомпенсации части составляющих модели дрейфа, таким образом применен новый комбинированный способ компенсации дрейфа, включающий автокомпенсацию наиболее нестабильной при наработке части дрейфа, которую трудно с высокой точностью скомпенсировать алгоритмически, и алгоритмическую компенсацию оставшихся составляющих дрейфа;
- в операции гирокомпасирования вводятся новые действия, связанные с поворотом гироскопа вокруг оси собственного вращения на 180 градусов при возможных больших углах его наклона и измерением показаний на этом угле, что обеспечивает выполнение автокомпенсации части составляющих дрейфа гироскопа в наклонном положении;
- определение истинного курсового угла производится по новой аналитической зависимости, в которой аналитически компенсируется только часть составляющих дрейфа, так как другая часть исключена применением режима автокомпенсации.
На фиг.1 представлена схема аналитического гирокомпаса с применением датчика угловой скорости на основе динамически настраиваемого гироскопа.
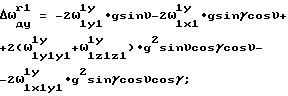
На фиг.2 показано изменение курсового угла от запуска к запуску с применением датчика угловой скорости на основе ГВК-6 при использовании известного и предлагаемого способов.
Проводилась экспериментальная сравнительная оценка стабильности от запуска к запуску измерений курсового угла при гирокомпасировании с помощью гироскопического датчика угловой скорости с применением известного и предлагаемого способов.
Экспериментальные исследования проводились с помощью датчика угловой скорости на базе динамически настраиваемого гироскопа ГВК-6 392116. Предварительно определялись коэффициенты модели дрейфа гироскопа. Затем динамически настраиваемый гироскоп ГВК-6 устанавливался на платформу наклонно-поворотного стенда таким образом, что измерительная ось гироскопа Yr1 имела курсовой угол К=1,65 град, а плоскость измерительных осей гироскопа имела наклон по тангажу υ=20 град и по крену γ=-20 град.
Делалось пять запусков гироскопа по одному запуску в день. Определялся курсовой угол с применением известного и предлагаемого способов как среднее значение показаний за время измерения. При этом в предлагаемом способе использовались напряжения с эталонных сопротивлений гироскопа, полученные на исходном угле и после поворота гироскопа вокруг оси собственного вращения на 180 градусов, а в известном способе использовались те же напряжения, но только в исходном положении. Определялись изменения показаний курсового угла относительно его значения в первом запуске.
На фиг.2 показано изменение курсового угла от запуска к запуску при гирокомпасировании с применением датчика угловой скорости на основе ГВК-6 при использовании известного и предлагаемого способов.
Из зависимостей, представленных на фиг.2, видно, что применение предлагаемого способа позволяет повысить стабильность показаний при гирокомпасировании в различных запусках. Так изменение курсового угла при гирокомпасировании в 5 запусках находилось в пределах трубки шириной 0,53 град при использовании известного способа и в пределах трубки шириной 0,19 град при применении предлагаемого способа, что в 2,8 раза меньше.
Использование предлагаемого способа гирокомпасирования с применением гироскопического датчика угловой скорости и комбинированной компенсации его дрейфа обеспечивает по сравнению с существующим способом повышение точности гирокомпасирования. Повышение точности гирокомпасирования расширяет область применения гирокомпасных устройств, например, появляется возможность применения их в геодезии, строительстве, авиации при начальной выставке по курсу бесплатформенных курсовертикалей и инерциальных систем.
Способ может быть использован при создании гирокомпасов и курсоуказывающих устройств аналитического типа. Предварительно привязывают плоскость измерительных осей гироскопа и оси собственного вращения к осям, связанным с объектом. Согласовывают знаки изменения напряжений с эталонных сопротивлений гироскопа с направлением азимутального поворота его корпуса вокруг оси собственного вращения. Определяют коэффициенты модели дрейфа гироскопа, широту местоположения объекта, углы наклона плоскости измерительных осей гироскопа по тангажу и крену. Проводят автокомпенсацию дрейфа гироскопа, не зависящего от ускорения, пропорционального ускорению вдоль оси собственного вращения, пропорционального второй степени ускорения вдоль осей гироскопа, от совместного действия ускорений по измерительным осям гироскопа, для чего совмещают измерительную ось первого канала гироскопа с продольной осью объекта и измеряют в этом первом положении напряжения с эталонных сопротивлений его двух каналов. Затем поворачивают гироскоп вокруг оси собственного вращения на 180o относительно первого положения и в этом втором положении измеряют напряжения с эталонных сопротивлений каналов гироскопа. Находят разность измеренных напряжений по двум каналам в этих положениях. Вычисляют по аналитическому выражению значение угла истинного курса, компенсируя алгоритмически оставшуюся часть дрейфа гироскопа. Обеспечивается повышение точности гирокомпасирования. 2 ил.
Способ гирокомпасирования с применением гироскопического датчика угловой скорости и комбинированной компенсации его дрейфа, включающий предварительную привязку плоскости измерительных осей гироскопа и оси собственного вращения к осям, связанным с объектом, согласование знаков изменения напряжений с эталонных сопротивлений гироскопа с направлением азимутального поворота его корпуса вокруг оси собственного вращения, определение коэффициентов модели дрейфа гироскопа, широты местоположения объекта, углов наклона плоскости измерительных осей гироскопа по тангажу и крену, отличающийся тем, что при гирокомпасировании проводят автокомпенсацию дрейфа гироскопа, не зависящего от ускорения, пропорционального ускорению вдоль оси собственного вращения, пропорционального второй степени ускорения вдоль осей гироскопа, от совместного действия ускорений по измерительным осям гироскопа, для чего совмещают измерительную ось первого канала гироскопа с продольной осью объекта и измеряют в этом первом положении напряжения с эталонных сопротивлений его двух каналов, после этого поворачивают гироскоп вокруг оси собственного вращения на 180o относительно первого положения и в этом втором положении измеряют напряжения с эталонных сопротивлений каналов гироскопа, находят разность измеренных напряжений по двум каналам в этих положениях, а затем вычисляют значение угла истинного курса, компенсируя алгоритмически оставшуюся часть дрейфа гироскопа, по следующей формуле:
к= 2π-arctg(b1b2 -1), если b1>0, b2>0;
к= π-arctg(b1b2 -1), если b1>0, b2<0;
к= π-arctg(b1b2 -1), если b1<0, b2<0;
к= -arctg(b1b2 -1), если b1<0, b2>0,
где 

Δω
ω - коэффициенты модели дрейфа, пропорциональные ускорению во второй степени;
- коэффициенты модели дрейфа, пропорциональные ускорению во второй степени;
U111, U121 - напряжения с эталонных сопротивлений датчика угловой скорости соответственно по первому и второму каналам в исходном положении;
U112, U122 - напряжения с эталонных сопротивлений датчика угловой скорости соответственно по первому и второму каналам в положении после поворота гироскопа на 180o;
Кн11, Кн12 - крутизна гироскопа по напряжению по первому и второму каналу;
υ, γ - углы наклона плоскости осей чувствительности гироскопа соответственно по тангажу и крену;
Ω - угловая скорость вращения Земли;
ϕ - широта местоположения объекта.
| V.L | |||
| Budkin, S.P | |||
| Redkin "Gyrocompassing on a Movable Object by Means of Angular Rate Sensor on the Basis of Dynamically Tuned Gyro" | |||
| Second International Symposium on Inertial Technology in Beijing | |||
| Beijing, China, October, 1988, pp | |||
| Крутильная машина для веревок и проч. | 1922 |
|
SU143A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА С ПОМОЩЬЮ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1995 |
|
RU2098766C1 |
| RU 2073206 C1, 10.02.1997 | |||
| СПОСОБ КОРРЕКЦИИ ГИРОКОМПАСА | 1999 |
|
RU2153152C1 |

