Изобретение относится к машиностроению, в частности к манипуляторам, предназначенным для выполнения загрузочно- разгрузочных операций в кузнечно-прессовом производстве, механизации основных и вспомогательных операций, и может быть использовано для укладки (извлечения) деталей в рабочей зоне обрабатывающей машины.
Известен привод поворота исполнительного органа манипулятора, содержащий корпус, силовой цилиндр, поршни которого выполнены заодно со штоком, в штоке выполнен паз, зубчато-реечную передачу, зубчатое колесо которой размещено в пазу штока и связано с выходным элементом, а в поршнях силового цилиндра выполнены два соосных отверстия, параллельных оси штока силового цилиндра, и в одном из упомянутых поршней выполнена винтовая нарезка, а рейка выполнена цилиндрической формы с круговым зубом и опорными элементами, расположенными эксцентрично по концам рейки, и установлена в отверстиях поршней, причем на одном из опорных элементов выполнен зубчатый венец, установленный с возможностью взаимодействия с винтовой нарезкой отверстия поршня. (См. авторское свидетельство N 1521575, В 25 J 9/00, бюл. N 42, 1989 г.).
Признаки, совпадающие - наличие корпуса с расположенным в нем приводом-силового цилиндра.
Причины, препятствующие достижению технического результата, - достаточно большие габаритные размеры, нет возможности переналадок в широком диапазоне при изменении массы и габаритов перемещаемой детали, особенно имеющих крупные габариты и создающих значительный инерционный момент.
Известно захватно-поворотное устройство, содержащее основание, на котором установлен корпус с приводом его поворота, на корпусе в направляющих установлены зажимные губки с приводом их перемещения в виде силового цилиндра, а в основании выполнен кольцевой паз с радиальным выходом, в котором размещены дополнительно введенные ролики, оси которых закреплены на зажимных губках. (См. авторское свидетельство N 1393630, 4 В 25 J 5/00, бюл. N 17, 1988 г.).
Признаки, совпадающие - наличие корпуса с приводом его поворота, зажимные губки захвата с приводом их перемещения в виде силового цилиндра.
Причины, препятствующие достижению технического результата, - отсутствует возможность переналадок при изменении массы и габаритов перемещаемой детали, при значительном инерционном моменте отсутствует возможность безударного завершения рабочего цикла.
За прототип принят известный модуль ротации, содержащий корпус, вал, установленный в корпусе, схват и зубчато-реечную передачу, зубчатое колесо которой связано с одним концом вала, а схват связан с другим концом вала, он снабжен регулируемыми упорами, пружиной, шариковым фиксатором, установленным на корпусе с возможностью взаимодействия с валом, и коническим штырем, причем зубчатая рейка зубчато-реечной передачи установлена в корпусе перпендикулярно валу, а на ее концах смонтированы регулируемые упоры, при этом пружина установлена на зубчатой рейке между корпусом и одним из регулируемых упоров, а в корпусе выполнено отверстие под конический штырь, кроме этого, на валу выполнены радиальные отверстия, предназначенные для взаимодействия с коническим штырем, а схват соединен с валом посредством клеммового соединения. (См. авторское свидетельство N 1537511, 5 B 25 J 9/08, бюл. N 3, 1990 г.)
Признаки, совпадающие - наличие корпуса с установленным схватом, связанного валом с зубчатым колесом, установленным в корпусе, регулируемые упоры, фиксатор.
Причины, препятствующие достижению технического результата - большие габаритные размеры, вследствие использования зубчато-реечной передачи, нет возможности переналадок в широком диапазоне, отсутствует возможность безударного завершения рабочего цикла, наличие автоколебаний и вибраций при перемещении деталей, особенно имеющих крупные габариты и создающих значительный инерционный момент.
Задачей предложенного изобретения является повышение надежности, технологических возможностей, упрощение переналадок и конструкции модуля ротации, позволяющего устранить вышеизложенные причины.
Технический результат заключается в создании модуля ротации, содержащего смонтированный на исполнительном органе упор, вращающийся с закрепленным захватом корпус, связанный посредством зубчатой передачи приводным валом с приводом поворота, и регулируемые роликовые упоры, при этом корпус выполнен с внутренним зубчатым венцом и планшайбой, на которой с внутренней стороны закреплен сменный угловой сектор, со смонтированными в нем узлами регулировки роликовых упоров, взаимодействующих с установленным с возможностью поворота в корпусе рычагом, в котором одним концом закреплен торсион, другой конец торсиона закреплен в исполнительном органе, а устройства фиксации угла поворота выполнены в виде электромагнитных защелок и поочередно взаимодействуют с угловым сектором.
Это позволяет при незначительных габаритных размерах модуля ротации, при изменении усилия воздействия на него, а также изменении угла поворота, надежно, быстро и точно произвести переналадку в широком диапазоне, обеспечить возможность безударного завершения рабочего цикла, исключить наличие автоколебаний и вибраций при перемещении деталей, особенно имеющих крупные габариты и создающих значительный инерционный момент.
Дополнительно осуществить посредством электромагнитных защелок надежную фиксацию модуля поворота, что даже при перебоях питания обеспечивает безопасность работы.
Предлагаемый модуль ротации поясняется чертежами, где на фиг. 1 изображен его общий вид в разрезе; на фиг.2 - разрез А-А фиг. 1.
Модуль ротации содержит смонтированный на исполнительном органе (1) упор (2), вращающийся с закрепленным захватом корпус (3), связанный посредством зубчатой передачи приводным валом (4) с приводом поворота, и регулируемые роликовые упоры (5), при этом корпус (3) выполнен с внутренним зубчатым венцом и планшайбой, на которой с внутренней стороны закреплен сменный угловой сектор (6), со смонтированными в нем узлами регулировки (7) роликовых упоров (5), взаимодействующих с установленным с возможностью поворота в корпусе рычагом (8), в котором одним концом закреплен торсион (9), другой конец торсиона закреплен в исполнительном органе (1), а устройства фиксации угла поворота выполнены в виде электромагнитных защелок (10) и поочередно взаимодействуют с угловым сектором (6).
Работает модуль ротации следующим образом: от привода поворота (не показан) через приводной вал (4) посредством зубчатой передачи вращается с закрепленным захватом корпус (3), на котором предварительно закреплен обеспечивающий требуемый угол сменный угловой сектор (6), со смонтированными в нем узлами регулировки (7) регулируемых роликовых упоров (5), сменный угловой сектор (6), перемещаясь до упора (2), посредством регулируемых роликовых упоров (5) взаимодействует с рычагом (8), закручивая торсион (9), обеспечивается требуемый угол его закрутки, при этом происходит плавное торможение, уменьшение инерционного момента модуля ротации, по достижению угловым сектором (6) упора (2) срабатывает соответствующая электромагнитная защелка (10) и осуществляется фиксация модуля в данном положении.
Обратный ход осуществляется аналогично, при срабатывании соответствующей электромагнитной защелки, под воздействием накопленной кинетической энергии и привода поворота происходит поворот модуля ротации в обратную сторону до последующей фиксации.
Данный модуль ротации позволяет осуществлять поворот захвата как симметрично, так и ассимметрично относительно его оси в зависимости от угла сменного сектора, с различным запасом потенциальной энергии, что позволяет уменьшить пусковые нагрузки. Например, больший запас потенциальной энергии у торсиона за счет регулировки угла закрутки перед началом перемещения захвата с грузом и меньший запас потенциальной энергии когда происходит перемещение без груза, что особенно важно при необходимости быстро и точно произвести переналадку в широком диапазоне, обеспечить возможность безударного завершения рабочего цикла, исключить наличие автоколебаний и вибраций при перемещении деталей, особенно имеющих крупные габариты и создающих значительный инерционный момент. При простоте конструкции это является важным при применении данного модуля ротации в штамповочном производстве, где переналадка осуществляется из расчета на большое количество деталей, а угол поворота обусловлен и не требуется его изменение в процессе работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЗОНАНСНЫЙ ПРИВОД | 1999 |
|
RU2162791C2 |
| ВИБРАЦИОННОЕ УСТРОЙСТВО | 1999 |
|
RU2175578C2 |
| УСТРОЙСТВО ДЛЯ УПРОЧНЯЮЩЕ-ЧИСТОВОГО ОБКАТЫВАНИЯ ДЕТАЛЕЙ | 2001 |
|
RU2201323C2 |
| УСТРОЙСТВО ДЛЯ УПРОЧНЯЮЩЕ-ЧИСТОВОГО ОБКАТЫВАНИЯ ДЕТАЛЕЙ | 2001 |
|
RU2184024C1 |
| ЗАХВАТ | 2000 |
|
RU2175910C1 |
| УСТРОЙСТВО ДЛЯ БЫСТРОГО ВЫВОДА РЕЗЦА ИЗ ЗОНЫ РЕЗАНИЯ | 1999 |
|
RU2162392C1 |
| УЧЕБНЫЙ ПРИБОР ПО ГЕОМЕТРИИ | 1996 |
|
RU2121165C1 |
| ТРАНСФОРМАТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ БОЛЬШИХ УГЛОВЫХ И МАЛЫХ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2062975C1 |
| УСТРОЙСТВО ДЛЯ БЫСТРОГО ВЫВОДА РЕЗЦА ИЗ ЗОНЫ РЕЗАНИЯ | 2001 |
|
RU2193950C1 |
| УСТРОЙСТВО ДЛЯ БЫСТРОГО ВЫВОДА РЕЗЦА ИЗ ЗОНЫ РЕЗАНИЯ | 2001 |
|
RU2207938C1 |

Изобретение относится к манипуляторам, предназначенным для выполнения загрузочно-разгрузочных операций в кузнечно-прессовом производстве, и может быть использовано для укладки (извлечения) деталей в рабочей зоне обрабатывающей машины. Модуль ротации содержит смонтированный на исполнительном органе упор, вращаемый корпус с закрепленным на нем захватом, регулируемые роликовые упоры и устройства фиксации. Корпус связан посредством зубчатой передачи приводным валом с приводом поворота и выполнен с внутренним зубчатым венцом и планшайбой. На планшайбе с внутренней стороны закреплен сменный угловой сектор со смонтированными в нем узлами регулировки роликовых упоров, взаимодействующих с установленным с возможностью поворота в корпусе рычагом, в котором одним концом закреплен торсион. Другой конец торсиона закреплен в исполнительном органе. Устройства фиксации выполнены как устройства фиксации угла поворота рычага в виде электромагнитных защелок, поочередно взаимодействующих с угловым сектором. Изобретение позволит осуществить поворот захвата как симметрично, так и асимметрично относительно его оси, уменьшить пусковые нагрузки. 2 ил.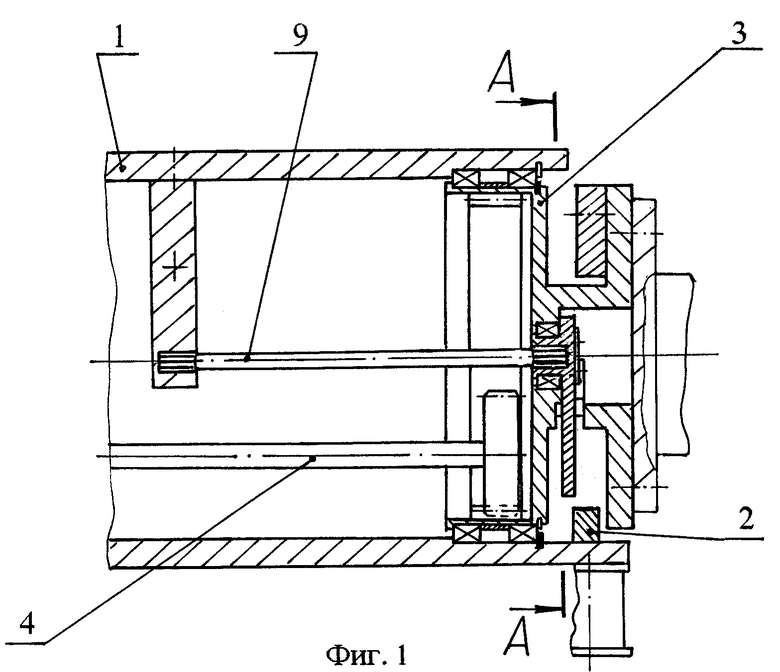
Модуль ротации, содержащий упор, смонтированный на исполнительном органе, вращаемый корпус с закрепленным на нем захватом, регулируемые роликовые упоры и устройства фиксации, отличающийся тем, что корпус связан посредством зубчатой передачи приводным валом с приводом поворота и выполнен с внутренним зубчатым венцом и планшайбой, на которой с внутренней стороны закреплен сменный угловой сектор, со смонтированными в нем узлами регулировки роликовых упоров, взаимодействующих с установленным с возможностью поворота в корпусе рычагом, в котором одним концом закреплен торсион, при этом другой конец торсиона закреплен в исполнительном органе, а устройства фиксации выполнены как устройства фиксации угла поворота рычага в виде электромагнитных защелок, поочередно взаимодействующих с угловым сектором.
| Модуль ротации | 1988 |
|
SU1537511A1 |
| Механизм поворота манипулятора | 1989 |
|
SU1685702A1 |
| Модульный привод вращения | 1978 |
|
SU745671A1 |
| ЯКОРНОЕ УСТРОЙСТВО с ВЫВАЛИВАЮЩЕЙСЯ ЯКОРЬ-БАЛКОЙ | 0 |
|
SU164210A1 |
