Фиг.
Изобретение относится к машиностроению, в частности к промышленным роботам и манипуляторам для автоматизации сборочных процессов, выполняемы с ротацией схвата манипулятора.
Цель изобретения - расширение технологических возможностей за счет регулировки угла поворота.
На фиг. 1 изображен модуль рота- ции, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Модуль ротации содержит корпус 1 с валом 2. На выходном конце вал а 2 при помощи клеммы закреплен схват 3. 1На противоположном конце вала 2 установлена наружной обоймой обгонная муфта 4, которая закреплена шпонкой на зубчатом колесе 5 зубчато-реечной передачи. Поворот вала 2 осуществля- ется зубчатой рейкой 6, скользящей во втулках 7. На зубчатую рейку 6 зубчато-реечной передачи установлена пружина 8, а на концах зубчатой рейки 6 закреплены регулируемые упоры 9. Для фиксации положения вала 2 имеются шариковый фиксатор 10 и конический штырь 11, установленный соосно отверстию в корпусе 1. При этом на валу 2 выполнены радиусные отверстия , предназначенные для взаимодействия с коническим штырем 11. Модуль ротации установлен на механической руке 12 манипулятора, несущей нерегулируемый упор 13 и штырь 11 установлены автономно от руки 12.
Модуль ротации работает следующим образом.
При наезде механической руки 12 ма нипулятора на любой нерегулируемый упор 13 зубчатая рейка 6 вдавливается
внутрь корпуса, сжимая пружину 8. Зубчатая рейка 6 тем самым вращает зубчатое колесо 5, а обгонная муфта 4 передает вращение валу 2. Положение вала 2 предварительно фиксируется шариковым фиксатором 10, а окончательно (более точно) фиксируется коническим штырем 11. Возврат зубчатой рейки Ь в исходное положение осуществляется пружиной 8. Величина хода и крайние положения зубчатой рейки регулируются регулируемыми упорами Ь.
/ /
Формула изобретения
Модуль ротации, содержащий корпус, вал,.установленный в корпусе, схват и зубчато-реечную передачу, зубчатое колесо которой связано с одним концом вала, а схват связан с другим концом вала, отличающийся тем, что, с целью расширения технологических возможностей за счет автономности и регулировки угла поворота схвата, он снабжен регулируемыми упорами, пружиной, шариковым фиксатором, установленным на корпусе с возможность взаимодействия с валом, и коническим штырем, причем зубчатая рейка зубчато-реечной передачи установлена в корпусе перпендикулярно валу, а на ее концах смонтированы регулируемые упоры, при этом пружина установлена на зубчатой рейке между корпусом и одним из регулируемых упоров, а в корпусе выполнено отверстие под конический штырь, кроме этого на валу выполнены радиальные отверстия, предназначенные для взаимодействия с коническим штырем, а схват соединен с валом посредством клеммового соединения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬ РОТАЦИИ | 2000 |
|
RU2176951C1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Кисть руки промышленного робота | 1981 |
|
SU1013256A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Шарнир манипулятора | 1989 |
|
SU1734995A1 |
| РЕГУЛИРУЕМОЕ КРЕПЛЕНИЕ ДЛЯ АВТОМАТИЗИРОВАННОЙ РАБОТЫ С ЖИДКОСТЬЮ | 2021 |
|
RU2824167C2 |
| Адаптивный захватный модуль промышленного робота | 1989 |
|
SU1689063A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| Механическая рука | 1983 |
|
SU1079405A1 |
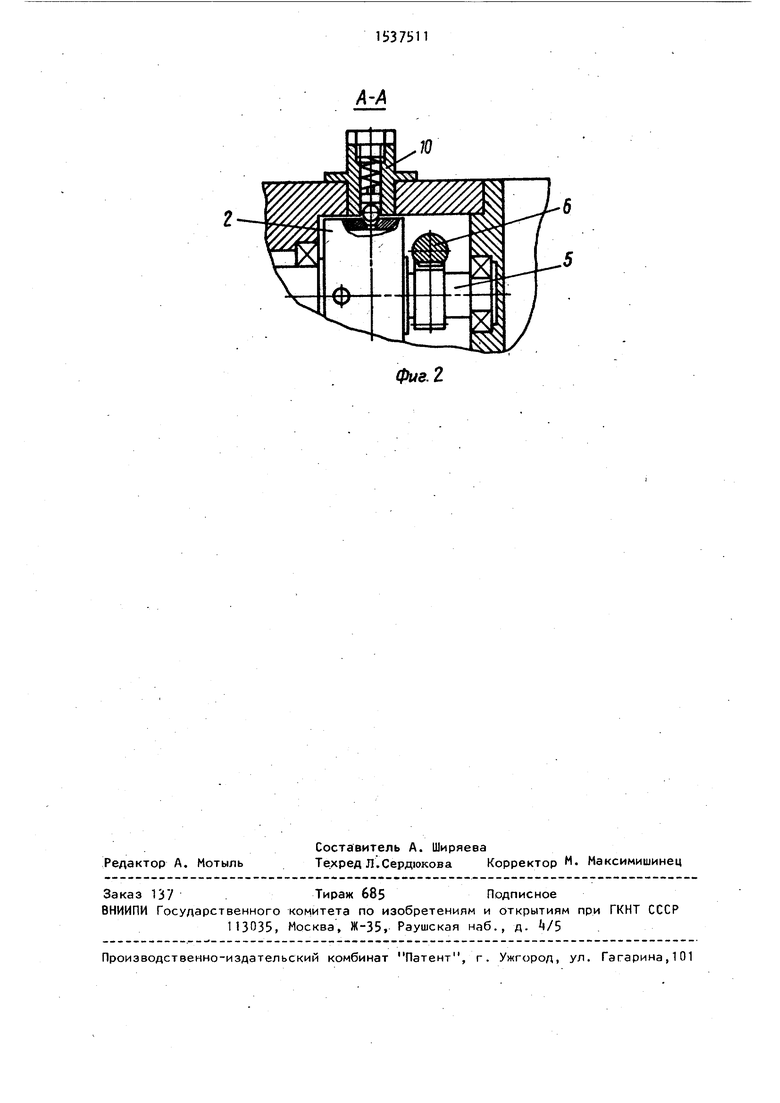
Изобретение относится к машиностроению, в частности к промышленным роботам и манипуляторам для автоматизации сборочных процессов, выполняемых с ротацией схвата. Цель изобретения - расширение технологических возможностей за счет регулировки угла поворота схвата. Регулировка осуществляется регулировочными упорами 9, установленными на подпружиненной зубчатой рейки 6 зубчатореечной передачи, размещенной в корпусе 1. Предварительная фиксация вала 2 со схватом 3, соединенным посредством клеммы, осуществляется шариковым фиксатором, окончательная фиксация - посредством конического штыря 11 и отверстий в корпусе 1 и вала 2. 2 ил.
фиг. 2
| СПОСОБ ОБЕЗВОЖИВАНИЯ ГЛАУБЕРОВОЙ СОЛИ СОЛНЕЧНОЙ ЭНЕРГИЕЙ | 1933 |
|
SU36390A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
