Ј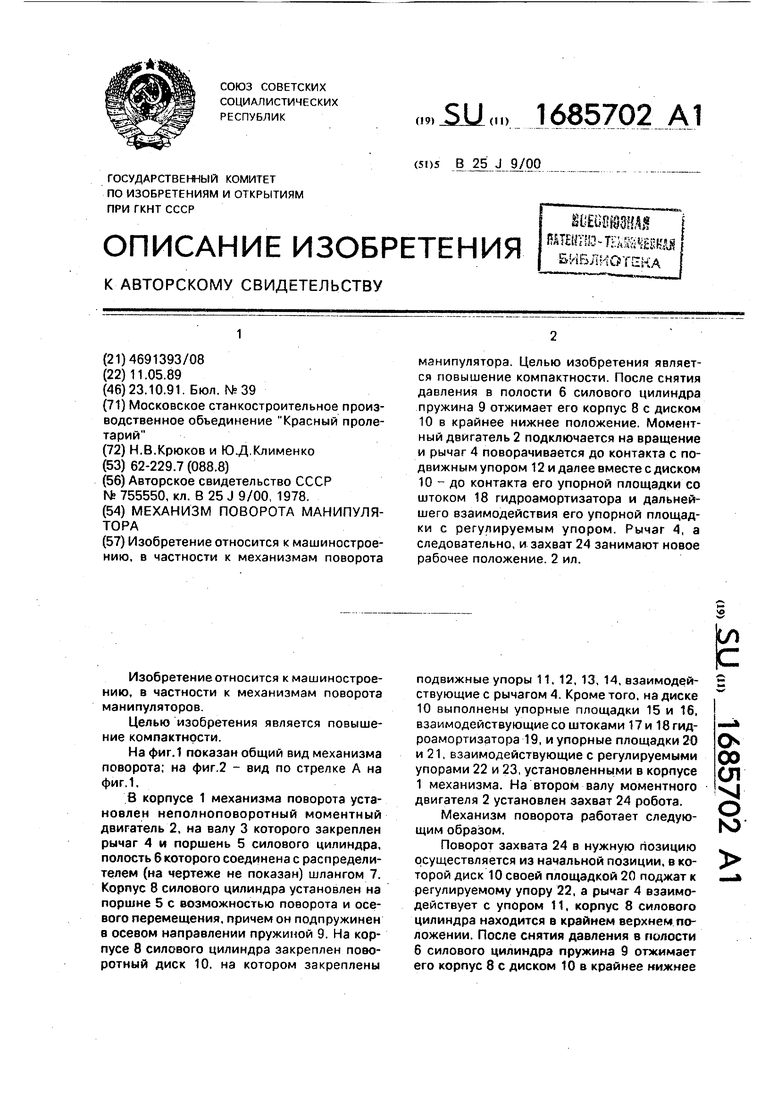
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Хобот манипулятора | 1979 |
|
SU829307A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| Устройство для подачи ящиков с откидными крышками и их закрывания | 1985 |
|
SU1333612A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |
| Модуль манипулятора | 1987 |
|
SU1512763A1 |
| Устройство для перемещения исполнительного органа манипулятора | 1985 |
|
SU1283084A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| Схват | 1987 |
|
SU1440707A2 |

Изобретение относится к машиностроению, в частности к механизмам поворота манипулятора. Целью изобретения является повышение компактности После снятия давления в полости 6 силового цилиндра пружина 9 отжимает его корпус 8 с диском 10 в крайнее нижнее положение. Момент- ный двигатель 2 подключается на вращение и рычаг 4 поворачивается до контакта с подвижным упором 12 и далее вместе с диском 10 - до контакта его упорной площадки со штоком 18 гидроамортизатора и дальнейшего взаимодействия его упорной площадки с регулируемым упором. Рычаг 4, а следовательно, и захват 24 занимают новое рабочее положение 2 ил.
Изобретение относится к машиностроению, в частности к механизмам поворота манипуляторов
Целью изобретения является повышение компактности.
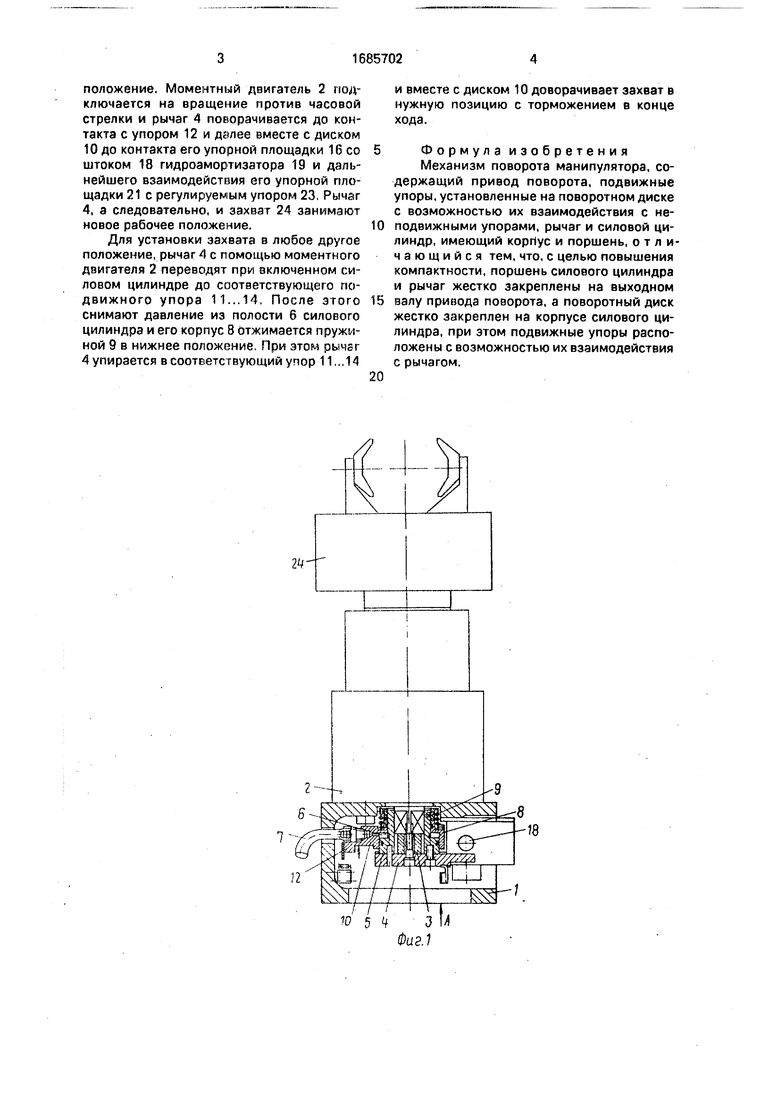
На фиг.1 показан общий вид механизма поворота; на фиг.2 - вид по стрелке А на фиг.1.
В корпусе 1 механизма поворота установлен неполноповоротный моментный двигатель 2, на валу 3 которого закреплен рычаг 4 и поршень 5 силового цилиндра, полость 6 которого соединена с распределителем (на чертеже не показан) шлангом 7. Корпус 8 силового цилиндра установлен на поршне 5 с возможностью поворота и осевого перемещения, причем он подпружинен в осевом направлении пружиной 9. На корпусе 8 силового цилиндра закреплен поворотный диск 10. на котором закреплены
подвижные упоры 11. 12, 13, 14, взаимодействующие с рычагом 4. Кроме того, на диске 10 выполнены упорные площадки 15 и 16, взаимодействующие со штоками 17 и 18 гидроамортизатора 19, и упорные площадки 20 и 21, взаимодействующие с регулируемыми упорами 22 и 23, установленными в корпусе 1 механизма. На втором валу моментного двигателя 2 установлен захват 24 робота.
Механизм поворота работает следующим образом.
Поворот захвата 24 в нужную позицию осуществляется из начальной позиции, в которой диск 10 своей площадкой 20 поджат к регулируемому упору 22, а рычаг 4 взаимодействует с упором 11, корпус 8 силового цилиндра находится в крайнем верхнем положении. После снятия давления в полости 6 силового цилиндра пружина 9 отжимает его корпус 8 с диском 10 в крайнее нижнее
00
ел
х4 О
ю
положение. Моментный двигатель 2 подключается на вращение против часовой стрелки и рычаг 4 поворачивается до контакта с упором 12 и далее вместе с диском 10 до контакта его упорной площадки 16 со штоком 18 гидроамортиэатора 19 и дальнейшего взаимодействия его упорной площадки 21 с регулируемым упором 23. Рычаг 4, а следовательно, и захват 24 занимают новое рабочее положение.
Для установки захвата в любое другое положение, рычаг 4 с помощью моментного двигателя 2 переводят при включенном силовом цилиндре до соответствующего подвижного упора 11...14. После этого снимают давление из полости б силового цилиндра и его корпус 8 бтжимается пружиной 9 в нижнее положение. При этом рычаг 4 упирается в соответствующий упор 11...14
24
П
0
5
0
и вместе с диском 10 доворачивает захват в нужную позицию с торможением в конце хода.
Формула изобретения Механизм поворота манипулятора, содержащий привод поворота, подвижные упоры, установленные на поворотном диске с возможностью их взаимодействия с неподвижными упорами, рычаг и силовой цилиндр, имеющий корпус и поршень, отличающийся тем, что, с целью повышения компактности, поршень силового цилиндра и рычаг жестко закреплены на выходном валу привода поворота, а поворотный диск жестко закреплен на корпусе силового цилиндра, при этом подвижные упоры расположены с возможностью их взаимодействия с рычагом.
Ю 5 Ц 3 М Фиг.1
Вид А
11 11 15 19
22 20
18
16
23
21
Фиг. 2
| Авторское свидетельство СССР ISfc 755550, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
