Изобретение относится к машиностроению, а именно к области тепловых машин внешнего нагревания, работающих по термодинамическому циклу Стирлинга, то есть в идеальном случае: изотерма - изохора - изотерма - изохора.
Известен двигатель с внешним подводом теплоты по патенту Российской Федерации N 2157459 от 11.03.1999 г., кл. F 02 G 1/043, F 03 G 7/06, содержащий корпус с соединенными между собой и образующими герметичную систему тремя камерами A, B и C, две из которых A и B теплоизолированы, внутри которого расположен механизм, состоящий из двух блоков цилиндров, разделенных теплоизолирующей перегородкой с образованием камер А и С, в каждом из которых равное число цилиндров, параллельных оси симметрии механизма и равномерно расположенных по окружности с центральной симметрией относительно оси вала, причем один из блоков - блок сжатия, находится в нижней теплоизолированной камере A, заполненной жидким водородом, а второй - блок расширения, находится в верхней нетеплоизолированной камере C, заполненной газообразным водородом при температуре окружающей среды, а также регенератор и холодильник.
Недостатком известного технического решения является сравнительно невысокая эффективность получения энергии за счет того, что отсутствует полная теплоизоляция камер A и B.
Задачей изобретения является расширение технологических возможностей за счет повышения эффективности получения энергии путем обеспечения полной теплоизоляции камер A и B за счет исключения единого вала, проходящего из камеры A в камеру C.
Это достигается тем, что в двигателе с внешним подводом теплоты, содержащим корпус с соединенными между собой и образующими герметичную систему тремя камерами A, B и C, две из которых A и B теплоизолированы, внутри которого расположен механизм, состоящий из двух блоков цилиндров, разделенных теплоизолирующей перегородкой с образованием камер A и C, в каждом из которых равное число цилиндров, параллельных оси симметрии механизма и равномерно расположенных по окружности с центральной симметрией относительно оси вала, причем один из блоков - блок сжатия, находится в нижней теплоизолированной камере A, заполненной жидким водородом, а второй - блок расширения, находится в верхней нетеплоизолированной камере C, заполненной газообразным водородом при температуре окружающей среды, а также регенератор и холодильник, имеется блок в виде двух синхронно вращающихся электромашин: генератора, выполненного по технологии сверхпроводимости, расположенного в теплоизолированной камере, заполненной жидким водородом, и вращаемого валом механизма качающейся шайбы нижней камеры и отдающего электроэнергию потребителю: электродвигателя, расположенного в верхней нетеплоизолированной камере и вращающего вал второго механизма качающейся шайбы, причем синхронность вращения валов и движения качающейся шайбы достигается за счет наличия дискретных датчиков углового положения вращающихся валов; управляющей ЭВМ, в которой в реальном времени вычисляется угловое рассогласование валов механизмов качающихся шайб и согласующего усилителя, управляемого сигналом от ЭВМ для устранения углового рассогласования валов и обеспечения синхронного движения качающихся шайб.
На фиг. 1 показан общий вид двигателя с внешним подводом тепла; на фиг. 2 - устройство датчиков положения валов; на фиг. 3 - структурная блок-схема управления синхронизацией валов.
Двигатель с внешним подводом тепла состоит из трех камер A, B и C, соединенных между собой и в целом образующих герметичную систему. Сосуды A и B теплоизолированы. Показанные на фиг. 1 теплоизоляционные стенки 20 и 22 можно расширительно интерпретировать как вакуумированные (типа сосуда Дьюара) или активного принудительного термостатирования. Камера C со стенкой 21, обладающей высокой теплопроводимостью, находится при температуре окружающей среды. Все три камеры заполнены водородом в различных фазовых состояниях. Камера B дополнительно заполнена порошком металлогидрида.
Камера C находится выше камеры A. Камера A постоянно заполнена жидким водородом, камера В первоначально заполнена жидким водородом, затем в процессе работы установки он переходит в газообразную форму, линия раздела 32 показана на фиг. 1. Два механизма качающейся шайбы двигателя с внешним подводом тепла размещаются в камерах A и C. Механизмы в камерах A и C образованы блоками цилиндров расширения 2 и сжатия. Цилиндры расположены параллельно оси вращения равномерно по окружности и их число больше 4, предпочтительно семь или девять в каждом блоке. Попарно цилиндры, в блоках 2 и 5 расположены соосно. В каждом цилиндре расположены поршни 3. Поршни 3 через шатуны 4 со сферическими шарнирами соединены с качающимися шайбами 7 - для блока цилиндров расширения и 8 - для блока сжатия. Геометрия механизмов такова, что цилиндрические поверхности шатунов постоянно находятся своими прямолинейными образующими на внутренних конических поверхностях поршней 3, что удерживает качающиеся шайбы 7 и 8 от проворачивания. Каждая пара соосных цилиндров блоков 2 и 5 соединена короткими трубопроводами со встроенными в них регенераторами 9 (пористыми элементами или проволочной, волоконной набивкой). Качающаяся шайба 7 через радиально-упорный подшипник 10 размещена в косой чаше 19 вала 1, а качающаяся шайба 8 через радиально-упорный подшипник 11 - в косой чаше 23 вала 49. Углы поворота плоскостей чаш 19 и 23 выполнены относительно осей, расположенных в плоскостях, перпендикулярных осям валов 1 и 49; для чаши 19 относительно оси, перпендикулярной плоскости чертежа фиг. 1, для чаши 23 относительно оси, расположенной в плоскости чертежа фиг. 1.
Таким образом, для соосных цилиндров, когда поршни 3 блока расширения 2 находятся в мертвых крайних положениях, для блока сжатия 5 поршни 3 находятся в средних положениях, то есть движения поршней в соосных цилиндрах сдвинуты на 90 град. Механизмы качающихся шайб выполнены в соответствии с определенными соотношениями, что обеспечивает безотрывное обкатывание шатунов по конусам поршней.
Ниже косой чаши 19 на валу 1 размещен ротор электродвигателя 34, размещенный внутри статора 35, для питания электродвигателя к статору 35 подходит электрическая линия 3. Вал 1 опирается на подшипники 12 и 14. Кроме того, на валу 1 установлен зубчатый диск 37, а электропреобразователь (электромагнитный, или оптоэлектронный, или датчик Холла) 38 установлен на внутренней поверхности блока 2. 37 и 38 вместе образуют датчик положения вала 1, от электропреобразователя 38 отходит электрическая линия 39.
Выше косой чаши 23 вала 49 на валу 49 размещен ротор 15 электрогенератора, статор которого 1 размещается внутри блока 5. Электрогенератор выполнен по технологии сверхпроводимости. Подмагничивание обеспечивается электрической линией 1, а съем электроэнергии - электрической линией 18. Вал 49 опирается на подшипники 33 и 13. На валу 49 между подшипником 33 и ротором 15 установлен зубчатый диск 40, а на внутренней поверхности блока 5 - электропреобразователь 41, аналогичные 3 и 38, от электропреобразователя 41 отходит электрическая линия 42. Электрические линии 1, 18, 3, 39 и 42 не нарушают герметичности камер A, B и C.
Камеры A и B соединены каналами 24. Блоками 25, 26, 27 обозначена криогенная зарядная установка, 28 - электрическая линия питания, 34 - вход дозаправки жидким водородом, 29 - регулирующий клапан, 30 - соединительный трубопровод, 31 - выпускной клапан. Поверхность раздела жидкого и газообразного показана позицией 32.
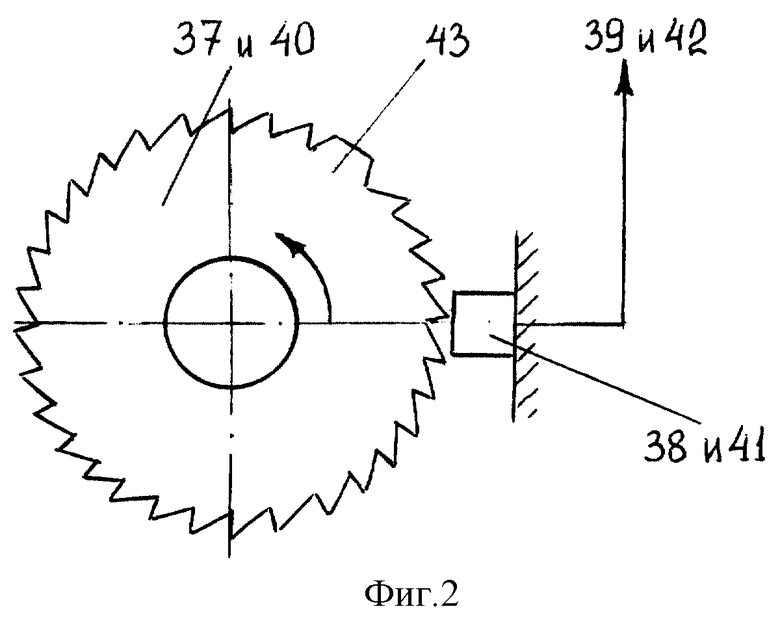
Устройство датчиков положения валов 1 и 49 показано на фиг. 2. Диски 37 и 40 имеют зубцы, равномерно расположенные по окружности. Зубцы проходят мимо электропреобразователей 38 и 41, упомянутых выше.
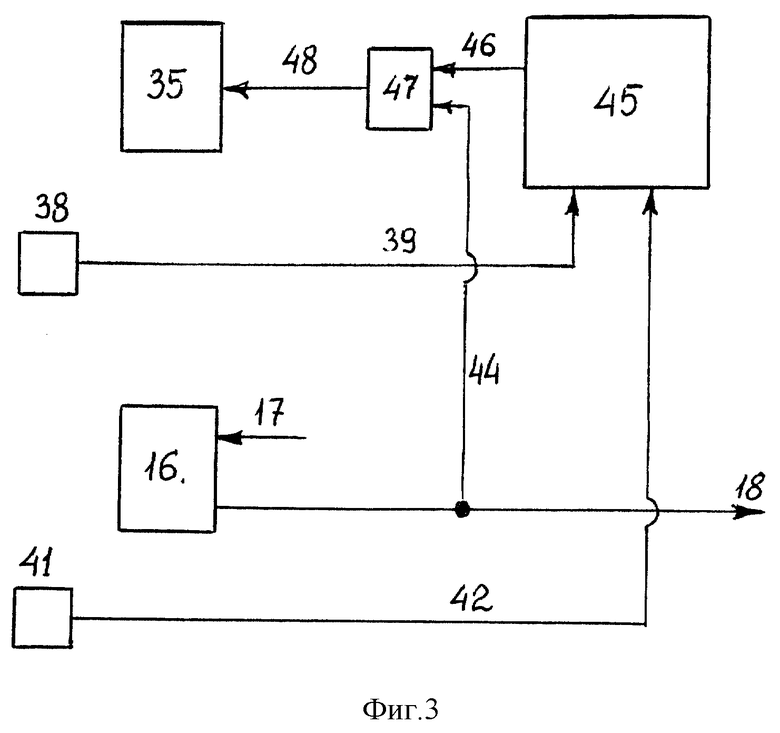
Структурная блок-схема управления синхронизацией валов 1 и 49 представлена на фиг. 3. Электропреобразователи 38 и 41 соединены с входным интерфейсом управляющей ЭВМ 45, с выхода 4 управляющий сигнал поступает на согласующий усилитель 47 и далее по линии 48 подается на статор 35 электродвигателя. Туда же со статора 16 электрогенератора по линии 44 поступает электропитание.
Двигатель с внешним подводом тепла работает следующим образом.
Весь объем камер A, B и C заполнен водородом в различных фазовых состояниях под давлением порядка 20 МПа (см. Г.Уокер "Двигатели Стирлинга", М.: Машиностроение. 1985, с. 57-60). Блок цилиндров 5 находится в среде жидкого водорода. Рабочим телом внутри цилиндров также является водород в газообразном состоянии. Сдвиг по фазе между движениями шатунно-поршневых групп в соосных цилиндрах составляет 90 град. за счет наклона качающихся шайб 7 и 8 посредством поворота шайб относительно взаимно перпендикулярных осей в плоскостях, перпендикулярных оси вала, что приближенно обеспечивает реализацию термодинамического цикла Стирлинга.
При синхронном движении валов 1 и 49 поршни 3 и шатуны 4 приходят в возвратно-поступательное движение, создавая сферическое движение без вращения касающихся шайб 7 и 8 и вращающихся валов 1 и 49. Сила и моменты передаются на косые чаши 19 и 23. При равномерном вращении валов 1 и 49 движение поршней 3 будет чисто гармоническим. Каждый механизм в камерах A и C обладает одной степенью свободы за счет постоянного контакта цилиндрических поверхностей шатунов 4 и внутренних конических поверхностей поршней 3. Шатуны 4 дважды за оборот валов соверают оборот относительно конуса поршня 3. Допуски на величину угла A при изготовлении выбирают положительными во избежание заклинивания механизма. Вал 19 вращает ротор 15 электрогенератора, который вырабатывает электроэнергию, снимаемую с обмотки статора 16. Вращение валов 49 и 1 является синхронным, что необходимо для обеспечения работоспособности двигателя с внешним подводом тепла. Синхронизация вращения электрогенератора и электродвигателя достигается следующим образом. Датчики оборотов электрогенератора и электродвигателя образованы соответственно дисками 40 и 37 и электропреобразователями 41, 38 (фиг. 2). Зубцы дисков 40, 37, проходя мимо электропреобразователей 38, 41, выдают электрические импульсы в линии 39, 42, которые являются координатой положения вращающихся механизмов. Укороченные зубья 43 на дисках задают начальную точку отсчета. Импульсы поступают через интерфейс в счетчики, программно организованные внутри управляющей ЭВМ 45, и вычислением в реальном времени разности цифровых сигналов координаты углового положения определяется угловое рассогласование валов 1 и 49, выдается сигнал с выхода 4 на ускорение или замедление электродвигателя.
Некоторая часть электроэнергии, вырабатываемой электрогенератором и снимаемой со статора 1, по линии 18 отводится на линию 44 и оттуда в согласующий усилитель 47. Сигнал углового рассогласования валов 1 и 49, полученный в управляющей ЭВМ через обработку импульсов, выдаваемых электропреобразователям 41 и 38, подается на согласующий усилитель 47 и управляет мощностью электрического тока, выдаваемой по линии 48, на статор 35 электродвигателя, чтобы свести к нулю угловое рассогласование валов 1 и 49 при вращении. Большая часть электроэнергии снимается со статора 16 электрогенератора и отдается потребителю, а на обмотку подмагничивания подается электроэнергия через линию 17. Термодинамический коэффициент полезного действия двигателя с внешним подводом тепла очень высок и составляет величину порядка 93-95%. Большая часть тепла окружающей среды из камеры C переводится в механическую работу и затем в электроэнергию. Однако часть тепла (5-7%) поступает из камеры C в камеры A и B, что приводит к переходу водорода из жидкого состояния в газообразное. Часть тепла поглощается за счет этого фазового перехода, часть за счет теплоемкости газа. В камере B образуется газовая подушка. Через клапан 29 и трубопровод 30 камеры B и C соединяются при повышении давления в камерах B, A. Повышение температуры газа в камере до заданной величины приводит к десорбции помещенного в камеру B гидрида, что поглощает поступающее из камеры A тепло; уровень 32 понижается. Процесс считается законченным, когда весь гидрид в камере B десорбирует. Включается криогенная зарядная установка (блоки 25, 26, 27), камеры A и B захолаживаются и дозаправляются через линию 34 жидким водородом.
Внешне тепловая энергетическая установка будет восприниматься как электрический аккумулятор чрезвычайно большой емкости. Она обеспечивает при применении в мобильных машинах (прежде всего в автомобилях) полную экологическую чистоту.
Заявка подготовлена при финансовой поддержке Российского Фонда фундаментальных исследований (Проект N 96-02-18481-а).
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИГАТЕЛЬ С ВНЕШНИМ ПОДВОДОМ ТЕПЛОТЫ | 2001 |
|
RU2200863C2 |
| ДВИГАТЕЛЬ С ВНЕШНИМ ПОДВОДОМ ТЕПЛОТЫ | 1999 |
|
RU2157459C1 |
| УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ ДВИГАТЕЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2174935C2 |
| ПЛАВУЧЕ-ШАГАЮЩИЙ ДОННЫЙ АППАРАТ | 2001 |
|
RU2214940C2 |
| СПОСОБ И УСТРОЙСТВО УРАВНОВЕШИВАНИЯ ВИБРАЦИОННЫХ НАГРУЗОК В РОТОРНЫХ МАШИНАХ | 2004 |
|
RU2282763C2 |
| СПОСОБ ЭЛЕКТРОКОНТАКТНОГО НАГРЕВА ЗАГОТОВОК | 1999 |
|
RU2151200C1 |
| СПОСОБ ЗАЩИТЫ ОБЪЕКТА НА МАЯТНИКОВОЙ ПОДВЕСКЕ ОТ РЕЗОНАНСНЫХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2245470C2 |
| СПОСОБ ОБРАБОТКИ ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2170161C2 |
| СПОСОБ РАБОТЫ ДВУХТАКТНОГО ДЕТОНАЦИОННОГО ДВИГАТЕЛЯ ВНУТРЕННОГО СГОРАНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2579287C2 |
| СПОСОБ ХРАНЕНИЯ И ПОДАЧИ ГАЗООБРАЗНОГО ВОДОРОДА | 2007 |
|
RU2381413C9 |
Изобретение относится к машиностроению, а именно к области тепловых машин внешнего нагревания, работающих по термодинамическому циклу Стирлинга, т. е. в идеальном случае по циклу изотерма - изохора - изотерма - изохора. Задачей изобретения является создание в перспективе автономной бестопливной энергетической установки, не уступающей двигателям внутреннего сгорания, улучшение теплотехнических характеристик путем обеспечения полной теплоизоляции камеры, заполненной жидким водородом, за счет исключения единого вала, проходящего из теплоизолированной в нетеплоизолированную камеру. Это достигается наличием двух синхронно вращающихся электромашин генератора, выполненного по технологии сверхпроводимости, расположенного в теплоизолированной камере, заполненной жидким водородом, и вращаемого валом механизма качающейся шайбы и отдающего электроэнергию потребителю; электродвигателя, расположенного в верхней нетеплоизолированной камере и вращаемого валом второго механизма качающейся шайбы. Синхронность вращения валов и движения качающихся шайб достигается за счет наличия дискретных датчиков углового положения вращающихся валов и управляющей ЭВМ, в которой в реальном времени вычисляется угловое рассогласование валов механизмов качающихся шайб и согласующего усилителя, управляемого сигналом от ЭВМ для устранения углового рассогласования вращающихся валов. 3 ил.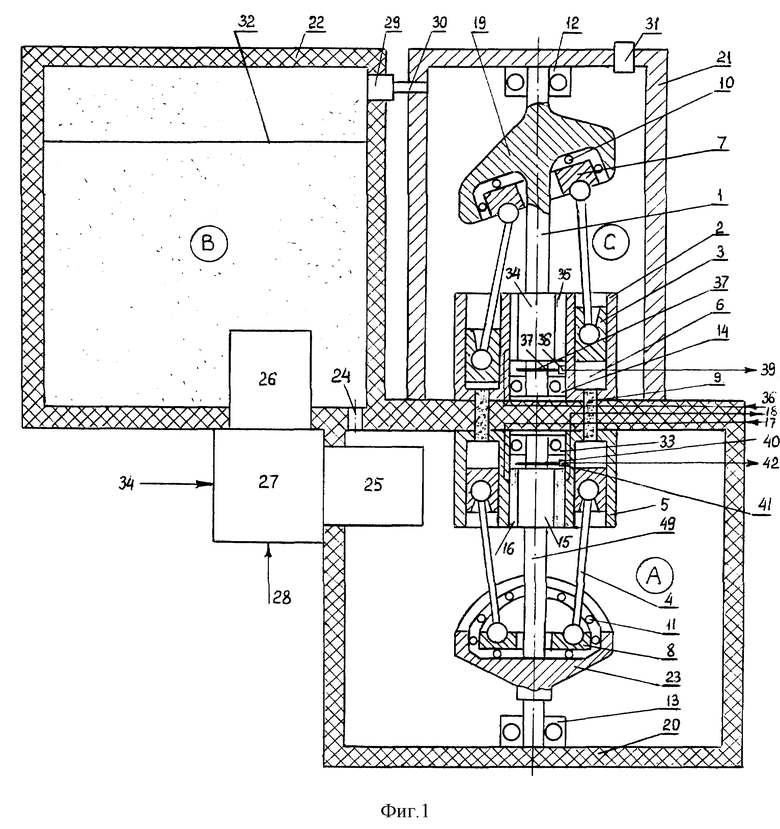
Двигатель с внешним подводом теплоты, содержащий регенератор, холодильник и корпус с соединенными между собой и образующими герметичную систему тремя камерами А, В и С, две из которых А и В теплоизолированы, внутри которого расположен механизм, состоящий из двух блоков цилиндров, разделенных теплоизолирующей перегородкой с образованием камер А и С, в каждом из блоков равное число цилиндров, параллельных оси симметрии механизма и равномерно расположенных по окружности с центральной симметрией относительно оси вала, причем один из блоков - блок сжатия - находится в нижней теплоизолированной камере А, заполненной жидким водородом, а второй - блок расширения - находится в верхней нетеплоизолированной камере С, заполненной газообразным водородом при температуре окружающей среды, отличающийся тем, что обеспечивает полную изоляцию камер А и В за счет исключения единого вала, проходящего из камеры А в камеру С, что достигается наличием двух синхронно вращающихся электромашин: генератора, выполненного по технологии сверхпроводимости, расположенного в теплоизолированной камере, заполненной жидким водородом, и вращаемого валом механизма качающейся шайбы нижней камеры и отдающего электроэнергию потребителю; электродвигателя, расположенного в верхней нетеплоизолированной камере и вращающего вал второго механизма качающейся шайбы, причем синхронность вращения валов и движения качающейся шайбы достигается за счет наличия дискретных датчиков углового движения вращающихся валов, управляющей ЭВМ, в которой в реальном времени вычисляется угловое рассогласование валов механизмов качающихся шайб, и согласующего усилителя, управляемого сигналом от ЭВМ для устранения углового рассогласования валов и обеспечения синхронного движения качающихся шайб.
| Двигатель с внешним подводом теплоты | 1990 |
|
SU1726830A1 |
| US 3451342 А, 24.06.1969 | |||
| Способ определения белка в листьях растений | 1987 |
|
SU1508996A1 |
| Способ определения компенсации сахарного диабета 1 типа у подростков | 2015 |
|
RU2613272C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ ЛЕЧЕНИЯ БОЛЬНЫХ ИНФИЛЬТРАТИВНЫМ ТУБЕРКУЛЕЗОМ ЛЕГКИХ | 2005 |
|
RU2284041C1 |

