Изобретение относится к области точного приборостроения, преимущественно гироскопического, и может быть использовано при создании гирокомпасов и курсоуказывающих устройств аналитического типа.
Известны способы определения истинного курса с помощью гироскопического датчика угловой скорости (см., например, книгу Назарова Б.И. и Хлебникова Г. А. Гиростабилизаторы ракет. - М., 1975, с.193-196 и патент RU 2098766 С1 по кл. G 01 С 21/14 от 10.12.1997), согласно которым курсовое направление горизонтально расположенной измерительной оси гироскопа на неподвижном основании определяют аналитически с использованием показаний с гироскопа, полученных на разных азимутальных углах.
За прототип взят способ определения курса с помощью двухканального гироскопического датчика угловой скорости (см. патент RU 2176708 по кл. G 01 C 21/12 от 10.12.2001).
В этом способе определения истинного курса с помощью двухканального гироскопического датчика угловой скорости предварительно привязывают измерительные оси гироскопа к осям, связанным с объектом, применяют гироскоп в режиме обратной связи по току датчика момента, определяют сигналы с эталонных сопротивлений датчика угловой скорости, проводят фазировку системы измерения напряжения с эталонных сопротивлений гироскопа, обеспечивающую отрицательное приращение сигналов с первого и второго каналов гироскопа при азимутальном повороте его корпуса против часовой стрелки на 90 градусов из положения, при котором измерительная ось У первого канала направлена на север, а измерительная ось Х второго канала на восток, определяют коэффициенты модели дрейфа гироскопа, а при гирокомпасировании в искомом курсовом положении объекта определяют углы наклона плоскости измерительных осей гироскопа по тангажу и крену, угол широты местоположения объекта, напряжения с эталонных сопротивлений гироскопа по первому и второму каналам, а затем определяют значение истинного курса измерительной оси первого канала гироскопа по следующей формуле:
K = 2π-arctg a, если b1>0, b2>0;
K = π-arctg a, если b1>0, b2<0;
K = π-arctg a, если b1<0, b2<0; (1)
K = -arctg a, если b1<0, b2>0;
где a = b1b2 -1,
b2 = U11Кн11cosγ+ω
ω
U11, U12 - напряжения с эталонных сопротивлений датчика угловой скорости соответственно по первому и второму каналам,
Kн11, Kн12 - крутизна гироскопа по напряжению для первого и второго каналов,
υ,γ - углы наклона плоскости осей чувствительности гироскопа соответственно по тангажу и крену,
Ω - угловая скорость вращения Земли,
ϕ - широта местоположения объекта.
Гирокомпасирование с применением известного способа возможно в условиях неподвижного объекта. Линейное движение объекта с гироскопом относительно поверхности Земли обуславливает погрешность гирокомпасирования.
Пусть объект с гироскопом движется относительно сферической Земли с радиусом R на высоте h с линейной скоростью V, как показано на фиг.1. Объект в этом случае имеет северную VN и восточную VE составляющую путевой скорости. Используя азимутальный угол ψ, характеризующий азимутальное положение вектора путевой скорости V в сопровождающей системе координат Дарбу ХдУдZд, можно представить
VN = Vcosψ,
VE = -Vsinψ. (2)
Эти составляющие путевой скорости вызовут угловые скорости изменения долготы  и широты
и широты  объекта, величину которых можно представить в виде
объекта, величину которых можно представить в виде

Вследствие линейного движения объекта мгновенную угловую скорость ωдн сопровождающей системы координат ХдУдZд в проекциях на ее оси можно представить
ω
ω
ω
Тогда при наличии углов тангажа υ и крена γ объекта проекции на измерительные оси объекта угловой скорости вследствие его линейного движения будут иметь вид
ω
ω
Таким образом, линейное движение объекта с гироскопом относительно сферической Земли обуславливает угловую скорость, действующую по осям гироскопа и являющуюся в данном случае вредной, вызывающей погрешности гирокомпасирования. Оценить эти погрешности можно расчетным путем, используя следующее выражение
где

ΔU11, ΔU12 - погрешность измерения напряжений с эталонных сопротивлений датчика угловой скорости соответственно по первому и второму каналам,
ΔKн11, Δ/ Кн12 - погрешность задания коэффициентов крутизны гироскопа по напряжению для первого и второго каналов,
Δυ,Δγ - погрешность задания углов наклона плоскости осей чувствительности гироскопа соответственно по тангажу и крену,
Δϕ - погрешность задания широты местоположения,
Δω
ΔV - погрешность задания путевой скорости,
Δh - погрешность задания высоты объекта,
ΔR - погрешность задания радиуса Земли.
При расчете погрешностей гирокомпасирования вследствие линейного движения объекта с использованием выражения (6) брались следующие значения параметров и ошибок их задания
ΔU11 = ΔU12 = 0,15 мВ,
Кн11 = Кн12 = 3,5•10-7 1/с мВ,
ΔKн11 = ΔKн12 = 3,5•10-10 1/c мВ,
ω
Δω
ϕ = 55,5 град.,
Δϕ = 0,05 град.,
Δυ = Δγ = 0,017 град.,
υ = γ = 30 град.,
Ω = 15 град./ч,
ΔR = 0, Δh = 0,
R = 6371, 032 км, h = 5 км,
V = 100 км/ч.
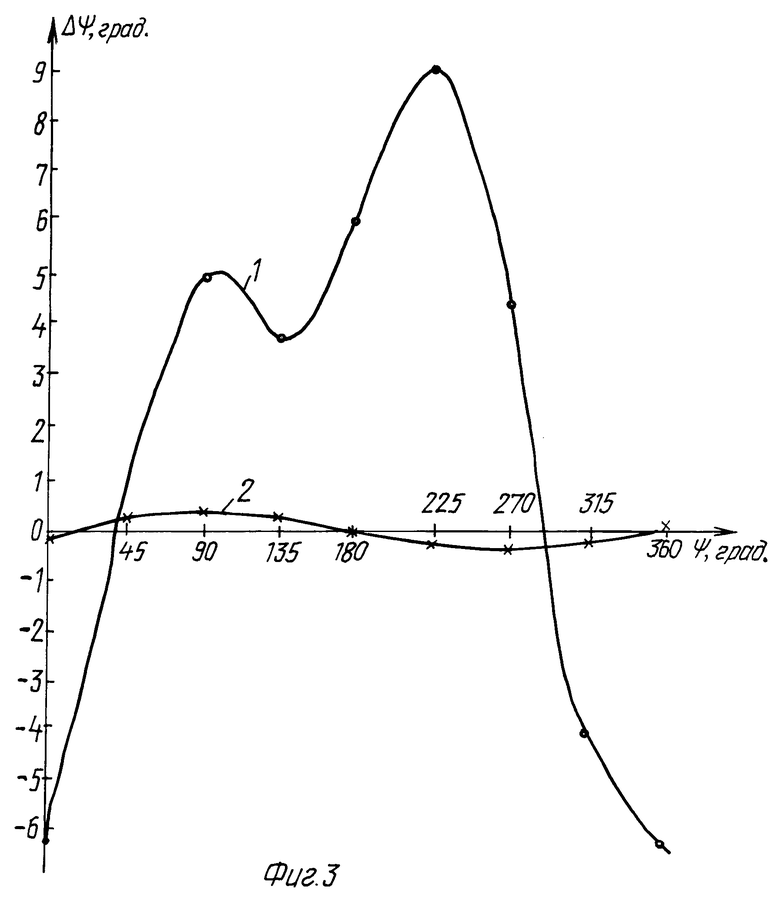
На фиг.3 зависимостью 1 показана погрешность гирокомпасирования датчика угловой скорости при линейном движении объекта по разным азимутальным направлениям с путевой скоростью 100 км/ч. Эти зависимости показывают, что на разных азимутальных углах линейное движение объекта может обуславливать существенные погрешности гирокомпасирования в известном способе.
Техническим результатом, который может быть получен при осуществлении настоящего изобретения, является повышение точности гирокомпасирования с применением гироскопического датчика угловой скорости при наличии линейного движения объекта.
Технический результат достигается тем, что в известном способе определения истинного курса с помощью двухканального гироскопического датчика угловой скорости, включающем предварительную привязку измерительных осей гироскопа к осям, связанным с объектом, работу гироскопа в режиме обратной связи по току датчика момента, фазировку сигналов с эталонных сопротивлений с направлением поворота корпуса гироскопа вокруг оси собственного вращения, определение модели дрейфа гироскопа, а при гирокомпасировании определение углов наклона плоскости измерительных осей гироскопа по тангажу и крену, угла широты местоположения объекта, напряжений с эталонных сопротивлений гироскопа по первому и второму каналам, дополнительно при гирокомпасировании определяют путевую скорость объекта, находят его высоту, а затем вычисляют угол истинного курса объекта по следующей формуле:
K = 2π-arctg (a1a2 -1), если a1>0, a2>0;
K = π-arctg (a1a2 -1), если a1>0, a2<0;
K = π-arctg (a1a2 -1), если a1<0, a2<0;
K = -arctg (a1a2 -1), если a1<0, a2>0;
где
ω
U11, U12 - напряжения с эталонных сопротивлений датчика угловой скорости соответственно по первому и второму каналам,
Kн11, Kн12 - коэффициенты крутизны гироскопа по напряжению соответственно для первого и второго каналов,
ν, γ - углы наклона плоскости осей чувствительности гироскопа соответственно по тангажу и крену,
Ω - угловая скорость вращения Земли,
ϕ - широта местоположения объекта,
V - путевая скорость объекта,
R - радиус Земли,
h - высота объекта.
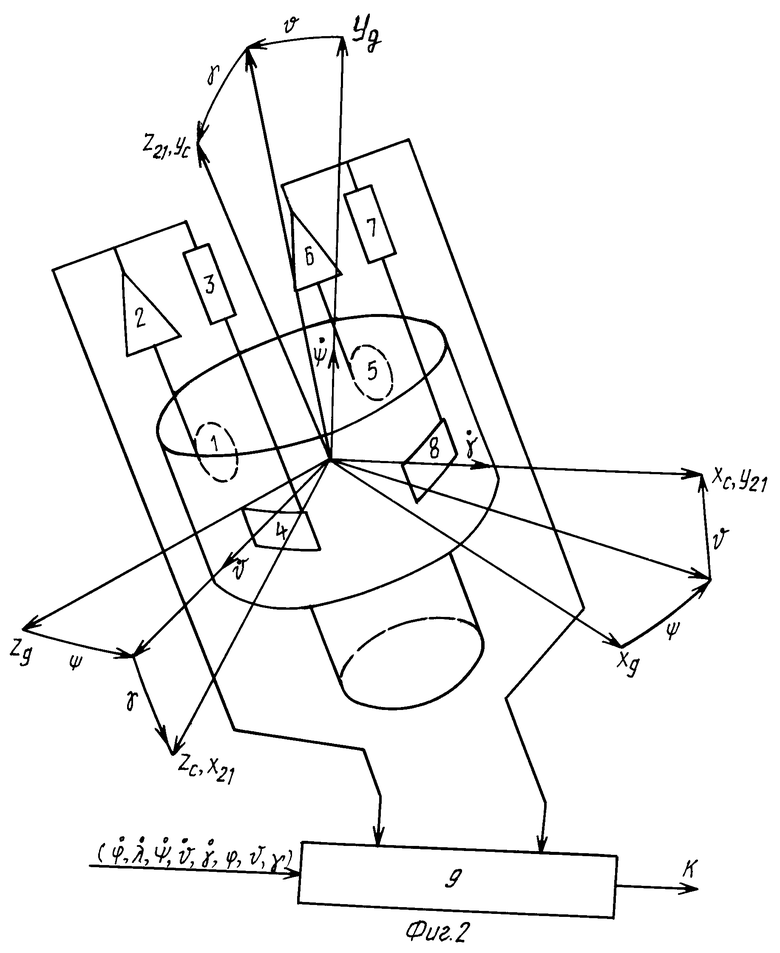
Схема гирокомпасирования с применением гироскопического датчика угловой скорости при бесплатформенной установке на объекте представлена на фиг.2.
При анализе этой схемы рассмотрим несколько систем координат, представленных на фиг.1 и 2.
На фиг. 1 показана геоцентрическая навигационная система координат ХнУнZн, сопровождающая система координат Дарбу ХдУдZд, траекторная система координат ХтУтZт и связанная с объектом система координат. На фиг.2 дополнительно показана система координат, связанная с гироскопом Xг1Уг1Zг1. Геоцентрическая система координат XнУнZн связана с Землей, которая принимается за шар, в центре которого расположено начало системы координат. Оси Ун и Zн расположены в плоскости экватора, при этом ось Ун находится на линии пересечения плоскости, образованной Гринвическим меридианом и экватором. Ось Хн направлена по оси вращения Земли. Отсчет геоцентрической широты ϕ производится между плоскостью экватора и направлением на объект радиуса-вектора. Геоцентрическая долгота λ определяется как двухгранный угол между плоскостями, образованными Гринвическим меридианом и меридианом, проходящим через точку, характеризующую местоположение объекта. Система координат Дарбу ХдУдZд является сопровождающей географической системой координат: ось Хд направлена на север, ось Уд - вертикально вверх, а ось Zд - на восток. Траекторная система координат XтУтZт связана с линией пути объекта, которая является проекцией на Земную поверхность пространственной траектории его движения. Ось Хт направлена по касательной к линии пути в направлении вектора путевой скорости V, ось Ут направлена вертикально вверх, ось Zт направлена так, чтобы система координат была правой. В связанной с объектом системе координат ХсУсZс начало системы помещено в центр масс объекта, оси Хс и Ус расположены в вертикальной плоскости симметрии объекта, при этом ось Хс направлена вдоль оси корпуса объекта, а ось Ус - по перпендикуляру к оси Хс, лежащему в вертикальной плоскости симметрии объекта, ось Zc перпендикулярна плоскости симметрии объекта и образует правую систему координат. В системе координат Xг1Уг1Zг1 оси Xг1 и Уг1 расположены в измерительной плоскости гироскопа, при этом ось Xг1 направлена по измерительной оси второго канала, а ось Уг1 по измерительной оси первого канала гироскопа, ось OZг1 направлена вдоль оси собственного вращения гироскопа.
Гироскоп работает в режиме обратной связи по токам датчиков момента и является двухканальным датчиком угловой скорости. Первый канал гироскопа содержит датчик угла 1, измеряющий поворот корпуса гироскопа относительно измерительной оси Уг1, усилитель 2, эталонное сопротивление 3, датчик момента 4, создающий момент вокруг оси Хг1. Второй канал содержит датчик угла 5, измеряющий поворот корпуса гироскопа относительно измерительной оси Xг1, усилитель 6, эталонное сопротивление 7, датчик момента 8, создающий момент вокруг оси Уг1. Напряжения U11 и U12, снимаемые с эталонных сопротивлений по первому и второму каналам, подаются в вычислитель 9.
В установившемся режиме для изодромной обратной связи напряжения с эталонных сопротивлений гироскопического датчика угловой скорости можно представить в следующем виде
U11 = (ω
U12 = (-ω
где ω
ω
При только линейном движении объекта с гироскопом относительно поверхности Земли на гироскоп будет действовать угловая скорость вращения Земли и угловая скорость, возникшая вследствие линейного движения, которая представлена выражением (5). Тогда при азимутальном повороте объекта на угол ψ и наклоне по тангажу на угол υ и по крену на угол γ проекции абсолютной угловой скорости корпуса гироскопа по осям Xг1 и Уг1 можно представить в следующем виде

Подставив значения ω
C11cosψ+C12sinψ = d1,
C21cosψ+C22sinψ = d2,
где C11 = Ωcosϕcosυ,
C12 = -V(R+h)-1tgϕsinυ,
C21 = Ωcosϕsinγsinυ,
C22 = Ωcosϕcosγ+V(R+h)-1tgϕsinγcosυ,
d1 = U11Kн11-Ωsinϕsinυ+ω
d2 = -U12Kн12+Ωsinϕsinγcosυ+V(R+h)-1cosγ+ω
Решая уравнение (10), определяем выражение для cosψ и sinψ. В практике гирокомпасирования с применением датчика угловой скорости вычисление курсового угла проводят через функцию арктангенс. Тогда аналитическое выражение для определения азимутального угла ψ можно представить в следующем виде:
ψ = arctg (a1a2 -1), (11)
где
При использовании функции тангенса квадрант, в котором расположен азимутальный угол ψ, можно вычислить по соотношению знаков sinψ и cosψ, которые находятся при решении уравнения (10).
Тогда, зная квадрант, формулу для вычисления угла истинного курса можно представить в виде
K = 2π-arctg (a1a2 -1), если a1>0, a2>0;
K = π-arctg (a1a2 -1), если a1>0, a2<0;
K = π-arctg (a1a2 -1), если a1<0, a2<0;
K = -arctg (a1a2 -1), если a1<0, a2>0.
Таким образом, предлагаемый способ гирокомпасирования с применением гироскопического датчика угловой скорости при линейном движении объекта имеет следующие отличия от известного способа:
- в операции гирокомпасирования введены новые действия по определению путевой скорости и высоты объекта,
- определение угла истинного курса объекта производится по новой аналитической зависимости, в которой используется новая информация о путевой скорости и высоте объекта.
На фиг.1 показано взаимное расположение систем координат.
На фиг. 2 показана схема гирокомпасирования с применением гироскопического датчика угловой скорости при бесплатформенной установке на объекте.
На фиг.3 показана погрешность гирокомпасирования с применением гироскопического датчика угловой скорости при линейном движении объекта по разным азимутальным направлениям с путевой скоростью 100 км/ч.
Проводились теоретические исследования точности гирокомпасирования с применением гироскопического датчика угловой скорости в условиях линейного движения объекта. Численные исследования выполнялись с использованием предложенного аналитического выражения (11), в котором присутствует алгоритмическая компенсация вредных угловых скоростей, обусловленных его линейным движением. При расчетах погрешностей гирокомпасирования использовалось выражение (6) и брались следующие значения параметров и ошибок их задания:
ΔU11 = ΔU12 = 0,15 мВ,
Кн11 = Кн12 = 3,5•10-7 1/с мВ,
ΔKн11 = Δ/ Kн12 = 3,5•10-101/c мВ,
ω
Δω
ϕ = 55,5 град.,
Δϕ = 0,05 град.,
Δυ = Δγ = 0,017 град.,
υ = γ = 30 град.,
Ω = 15 град./ч,
ΔR = 0, Δh = 0,
R = 6371, 032 км, h = 5 км,
V = 100 км/ч.
На фиг. 3 зависимостью 2 показана погрешность гирокомпасирования от путевой скорости с применением предлагаемого способа. Из сравнения зависимостей 1 и 2, представленных на фиг.3, видно, что при применении предлагаемого способа погрешность гирокомпасирования, обусловленная линейным движением объекта, значительно меньше, чем в случае применения известного способа.
Таким образом, использование предлагаемого способа позволяет существенно повысить точность гирокомпасирования при линейном движении объекта.
Применение предлагаемого способа позволяет расширить область применения гирокомпасных устройств на основе гироскопического датчика угловой скорости за счет возможности определения курса объекта при его линейном движении.
Использование: при создании гирокомпасов и курсоуказывающих устройств аналитического типа. Сущность: при гирокомпасировании с применением гироскопического датчика угловой скорости в условиях линейного движения объекта определяют путевую скорость объекта, находят его высоту, а затем вычисляют угол истинного курса объекта с помощью аналитического выражения, используя информацию о напряжениях с эталонных сопротивлений гироскопа и его дрейфе, об углах наклона плоскости осей чувствительности гироскопа по тангажу и крену, об угловой скорости вращения Земли и широте местоположения объекта. Технический результат: повышение точности гирокомпасирования. 3 ил.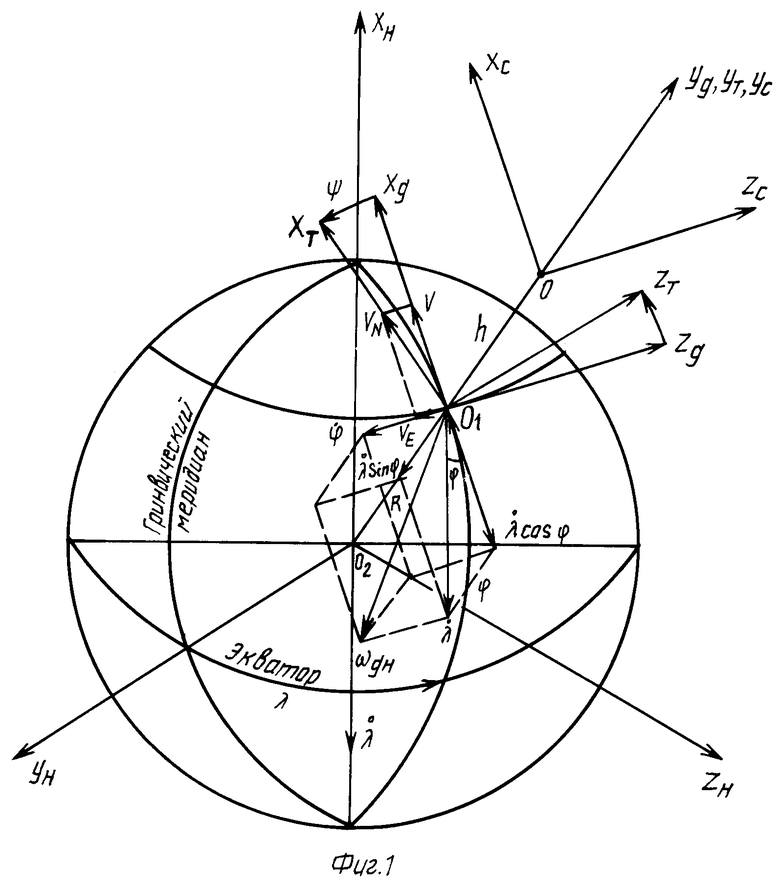
Способ гирокомпасирования с применением гироскопического датчика угловой скорости при линейном движении объекта, включающий предварительную привязку измерительных осей гироскопа к осям, связанным с объектом, работу гироскопа в режиме обратной связи по току датчика момента, фазировку сигналов с эталонных сопротивлений с направлением поворота корпуса гироскопа вокруг оси собственного вращения, определение модели дрейфа гироскопа, а при гирокомпасировании - определение углов наклона плоскости измерительных осей гироскопа по тангажу и крену, угла широты местоположения объекта, напряжений с эталонных сопротивлений гироскопа по первому и второму каналам, отличающийся тем, что при гирокомпасировании определяют путевую скорость объекта, находят его высоту, а затем вычисляют угол истинного курса объекта по следующей формуле:
К = 2π-arctg(a1a2 -1), если a1>0, a2>0;
К = π-arctg(a1a2 -1), если a1>0, a2<0;
К = π-arctg(a1a2 -1), если a1<0, a2<0;
К = -arctg(a1a2 -1), если a1<0, a2>0;
где 
ω
U11, U12 - напряжения с эталонных сопротивлений датчика угловой скорости соответственно по первому и второму каналам;
Кн11, Кн12 - коэффициенты крутизны гироскопа по напряжению соответственно для первого и второго каналов;
ν, γ - углы наклона плоскости осей чувствительности гироскопа соответственно по тангажу и крену;
Ω - угловая скорость вращения Земли;
ϕ - широта местоположения объекта;
V - путевая скорость объекта;
R - радиус Земли;
h - высота объекта.
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА С ПОМОЩЬЮ ДВУХКАНАЛЬНОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2000 |
|
RU2176780C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА С ПОМОЩЬЮ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1995 |
|
RU2098766C1 |
| US 4622646 А, 11.11.1986. | |||

