Изобретение относится к авиационному приборостроению и предназначено для использования в составе оборудования летательных аппаратов (ЛА) для навигации и наведения на заданные цели.
Из известных аналогов наиболее близким является система, описание которой приведено в книге [1] под редакцией Харисова В.Н. и др. "Глобальная спутниковая система ГЛОНАСС", Москва, ИПРЖР, 1998 г., стр. 50, стр. 73-89, содержащая первый - i-й навигационные спутники HC1,..., НСИ, спутниковую систему навигации СНС, блок формирования параметров движения летательного аппарата БФПД ЛА. При этом, например координаты местоположения летательного аппарата xи по данным НС, СНС формируются в БФПД ЛА с систематической погрешностью, достигающей 200 м; примерно такими же погрешностями определяются координаты ЛА  относительно заданных на земной поверхности точек (целей, ориентиров) с координатами xн.
относительно заданных на земной поверхности точек (целей, ориентиров) с координатами xн.
Техническим результатом, достигаемым при использовании предлагаемого технического решения, является повышение точности формирования координат ЛА относительно заданных целей (ориентиров).
Обеспечивается технический результат тем, что в комплексную информационную систему навигации и наведения, содержащую спутниковую навигационную систему и подключенные выходами к ее входу первый,..., i-й навигационные спутники, блок формирования параметров движения летательного аппарата, на вход которого подключен первый выход спутниковой навигационной системы, дополнительно введены включенные между выходами первого - i-го навигационных спутников и входом спутниковой навигационной системы первый - К-й блоки наведения и блок формирования относительных координат цели, на первый и второй входы которого подключены соответственно выход блока формирования параметров движения летательного аппарата и второй выход спутниковой навигационной системы. Блок формирования относительных координат цели содержит блок формирования координат блоков наведения, компаратор и последовательно соединенные блок алгебраического суммирования, блок формирования модуля, блок умножения и блок деления, первый выход которого подключен к первому входу блока алгебраического суммирования, на второй вход которого подключен первый вход блока формирования относительных координат цели, второй вход которого подключен ко входу блока формирования координат блоков наведения, выход которого подключен к третьему входу блока алгебраического суммирования и ко второму входу блока умножения, второй выход которого подключен к четвертому входу блока алгебраического суммирования, второй выход которого подключен ко входу компаратора, выход которого подключен к третьему входу блока умножения, на четвертый вход которого подключен второй выход блока деления, на второй вход которого подключен третий выход блока алгебраического суммирования, четвертый выход которого подключен к выходу блока формирования относительных координат цели, причем выход блока формирования модуля подключен к пятому входу блока алгебраического суммирования.
На фиг. 1 приведена блок-схема предлагаемой системы, содержащей:
1 - первый навигационный спутник НС1,
2 - i-й навигационный спутник НСИ,
3 - первый блок наведения БН1,
4 - K-й блок наведения БНК,
5 - спутниковая система навигации СНС,
6 - блок формирования относительных координат цели БФОКЦ,
7 - блок формирования параметров движения летательного аппарата БФПД ЛА.
Штриховой линией обозначены связи по радиосигналам. Связи между блоками осуществляются, например, в последовательном коде (ПК).
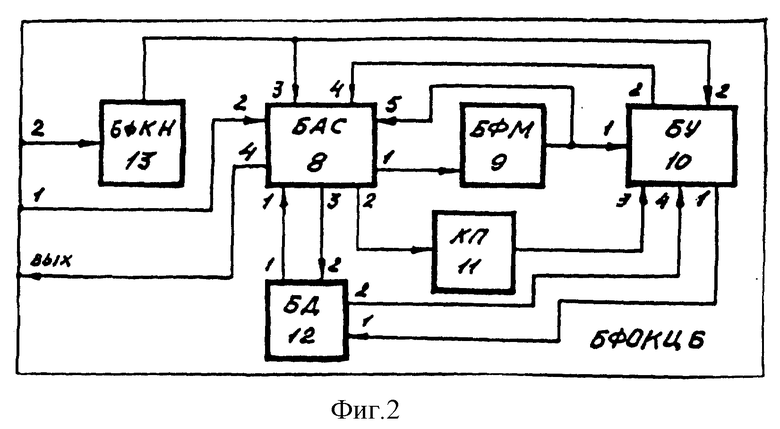
На фиг. 2 представлена блок-схема БФОКЦ6, содержащего:
8 - блок алгебраического суммирования БАС,
9 - блок формирования модуля БФМ, 10 - блок умножения БУ,
11 - компаратор КП,
12 - блок деления БД,
13 - блок формирования координат блоков наведения БФКН.
Связи между блоками, входящими в БФОКЦ6, осуществляются, например, в последовательном коде (ПК).
Система работает следующим образом. С выходов НС1 (1),..., НСИ 2 радионавигационные сигналы f1,..., fi поступают на входы БН1 (3),..., БНК 4 и на вход СНС 5, в котором по сигналам f1,..., fi ([1], стр.48) формируются сигналы дальностей Д1,..., Дi, которые с первого выхода СНС 5 поступают на вход БФДЛА 7.
БН1 (3), ..., БНК4 устанавливаются около целей или ориентиров или сбрасываются на территории противника с низколетящих вертолетов или самолетов с погрешностью 10-20 м. По техническому исполнению БН1 (3),..., БНК4 являются приемопередатчиками ([1] , стр. 174-176), принимающими от НС1 (1),..., НСИ2 радионавигационные сигналы f1,...,fi, формирующими и передающими дальности Д1к...., Дiк (к - количество блоков наведения), которые принимаются по входу СНС5, со второго выхода которого эти сигналы поступают на второй вход БФОКЦ6.
БФПД ЛА7 по техническому исполнению является вычислителем ([1], стр. 191-192, стр. 49), в котором по поступившим сигналам формируются составляющие скорости движения Vи и координаты местоположения ЛА xи= xn(Д1,...Дi) (здесь n = 1; 2; 3; xи= x + a; x - действительное значение координаты, a - погрешность). Сигналы xи с выхода БФПД ЛА7 выдаются потребителям (в систему управления, на индикацию экипажу, в прицельную систему) и поступают на первый вход БФОКЦ6, подключенный (см. фиг. 2) ко второму входу БАС8. Сигналы Д1к,..., Дiк, поступившие по второму входу БФОКЦ6, поступают на вход БФКН13, в котором ([1] , стр. 49) формируются координаты местоположения блоков БН1 (3),..., БНК4 -
xи1 = x1n(Д1к, ...Дiк) ,..., xик = xкn(Д1к,..., Дiк),
здесь n = 1; 2; 3; xиj = xн+aj, j= 1,..., к
xн - действительное значение координат цели (ориентира), aj - погрешность измерения. С выхода БФКН13 сигнал xнj поступает на второй вход БУ10 и на третий вход
БАС8.
БАС8 реализован на четырех стандартных суммирующих усилителях - элементах алгебраического суммирования ЭАС, выполняющих операции алгебраического суммирования. На первом ЭАС формируется сигнал отклонения от среднего значения
который с первого выхода БАС 8 поступает на вход БФМ9 (пример выполнения приведен в книге [2] И.М. Тотельбаума, Ю.Р. Шнейдера "400 схем для АВМ", Москва, Энергия, 1978 г., стр. 59), где формируются сигнал модуля  который с выхода БФМ9 поступает на первый вход БУ10 и пятый вход БАС8, в котором на втором ЭАС формируется сигнал отклонения от заданной допустимой величины (δo) Uj= δo-δj, который со второго выхода БАС 8 поступает на вход КП11 ([2], стр. 112), формирующего сигнал Δj= 1 при Uj ≥ 0; Δj= -A (A = ∞ - бесконечно большое число) при Uj < 0, сигнал Δj c выхода КП11 поступает на третий вход БУ10, реализованного на двух элементах умножения ЭУ ([2], стр. 53). На первом ЭУ формируется сигнал δj•Δj, который с первого выхода БУ10 поступает на первый вход БД12, выполненного на двух элементах деления ЭД. На первом ЭД формируется сигнал (δj•Δj)-1, который с первого выхода БД12 поступает на первый вход БАС8, в котором на третьем ЭАС формируется сигнал
который с выхода БФМ9 поступает на первый вход БУ10 и пятый вход БАС8, в котором на втором ЭАС формируется сигнал отклонения от заданной допустимой величины (δo) Uj= δo-δj, который со второго выхода БАС 8 поступает на вход КП11 ([2], стр. 112), формирующего сигнал Δj= 1 при Uj ≥ 0; Δj= -A (A = ∞ - бесконечно большое число) при Uj < 0, сигнал Δj c выхода КП11 поступает на третий вход БУ10, реализованного на двух элементах умножения ЭУ ([2], стр. 53). На первом ЭУ формируется сигнал δj•Δj, который с первого выхода БУ10 поступает на первый вход БД12, выполненного на двух элементах деления ЭД. На первом ЭД формируется сигнал (δj•Δj)-1, который с первого выхода БД12 поступает на первый вход БАС8, в котором на третьем ЭАС формируется сигнал  который с третьего выхода БАС8 поступает на второй вход БД12, в котором на втором ЭД формируется сигнал
который с третьего выхода БАС8 поступает на второй вход БД12, в котором на втором ЭД формируется сигнал
(здесь  ), который со второго выхода БД12 поступает на четвертый вход БУ10, в котором на втором ЭУ формируется сигнал xиj•λj, который со второго выхода БУ13 поступает на четвертый вход БАС8, в котором на четвертом ЭАС формируется оценка координат местоположения ЛА относительно цели.
), который со второго выхода БД12 поступает на четвертый вход БУ10, в котором на втором ЭУ формируется сигнал xиj•λj, который со второго выхода БУ13 поступает на четвертый вход БАС8, в котором на четвертом ЭАС формируется оценка координат местоположения ЛА относительно цели.

где x0 - действительное значение, δxo - погрешность.
Случайные выбросы погрешностей, связанные, например, с неконтролируемыми сбоями в одном (j-м) из блоков БН1(3),..., БНК(4), на погрешность δxo не влияют, т.к. при δj≥ δo, Δj= -A = -∞, λj= 0, ajλj= 0.
Примеры технического выполнения блоков БАС, содержащих несколько ЭАС; блоков БУ, содержащих несколько ЭУ; блоков БД, содержащих несколько ЭД, приведены в патенте РФ N 2069450, заявка N 96104607 от 13.03.96 г., МПК В 64 С 13/18; в патенте РФ N 2079106, заявка N 94020215 от 31.05.94 г., МПК G 01 С 23/00.
Сигнал  с четвертого выхода БАС8 поступает на выход БФОКЦ6, откуда выдается потребителям - бортовым системам управления, прицеливания, индикации экипажу.
с четвертого выхода БАС8 поступает на выход БФОКЦ6, откуда выдается потребителям - бортовым системам управления, прицеливания, индикации экипажу.
Координаты xи= x + a местоположения ЛА и координаты xиj = xн + aj (j = 1, ..., к) блоков наведения определяются с погрешностями  где систематические погрешности
где систематические погрешности  ([1] стр.167), флюктуационные погрешности
([1] стр.167), флюктуационные погрешности  составляют 1-3 м, случайная погрешность aoj установки блоков наведения составляет 10-20 м, тогда погрешность определения координат ЛА относительно цели при
составляют 1-3 м, случайная погрешность aoj установки блоков наведения составляет 10-20 м, тогда погрешность определения координат ЛА относительно цели при 


при 


соответственно при независимых равноточных aoj = b, погрешность (  что значительно меньше, чем в наиболее близком аналоге. Если блок наведения один и точно установлен по ориентиру, то погрешность
что значительно меньше, чем в наиболее близком аналоге. Если блок наведения один и точно установлен по ориентиру, то погрешность
как в дифференциальном режиме работы ([1], стр. 167).
Таким образом на примерах реализации показано достижение технического результата - повышение точности формирования координат ЛА относительно заданных точек (целей, ориентиров) и соответственно уменьшение погрешностей наведения на эти точки и повышение показателей боевой эффективности ЛА, оснащенных предлагаемой комплексной системой.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ГРУППОВОГО ВЗАИМОДЕЙСТВИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1999 |
|
RU2152078C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2168704C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1998 |
|
RU2146803C1 |
| СИСТЕМА НАВИГАЦИИ | 2000 |
|
RU2168703C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ФОРМИРОВАНИЯ СОСТАВЛЯЮЩИХ ПУТЕВОЙ СКОРОСТИ | 2000 |
|
RU2168153C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1999 |
|
RU2139568C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1999 |
|
RU2168154C1 |
| КОМПЛЕКСНАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 1999 |
|
RU2161777C1 |
| КОМПЛЕКСНАЯ КУРСОВАЯ СИСТЕМА | 1996 |
|
RU2098322C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
Использование: в составе бортового и наземного оборудования в качестве информационного устройства, обеспечивающего навигацию, управление, наведение летательных аппаратов и средств поражения на заданные цели. Сущность: в комплексную информационную систему, содержащую взаимосвязанные спутниковую систему навигации и навигационные спутники, а также блок формирования параметров движения летательного аппарата, дополнительно введены первый и К-й блоки наведения, сбрасываемые предварительно на заданные цели, ориентиры, вынесенные точки и блок формирования относительных координат цели. Технический результат заключается в повышении точности параметров навигации, управления, целеуказания и, как следствие этого, повышении боевой эффективности летательных аппаратов, снабженных предлагаемой комплексной информационной системой навигации и наведения. 1 з.п.ф-лы, 2 ил.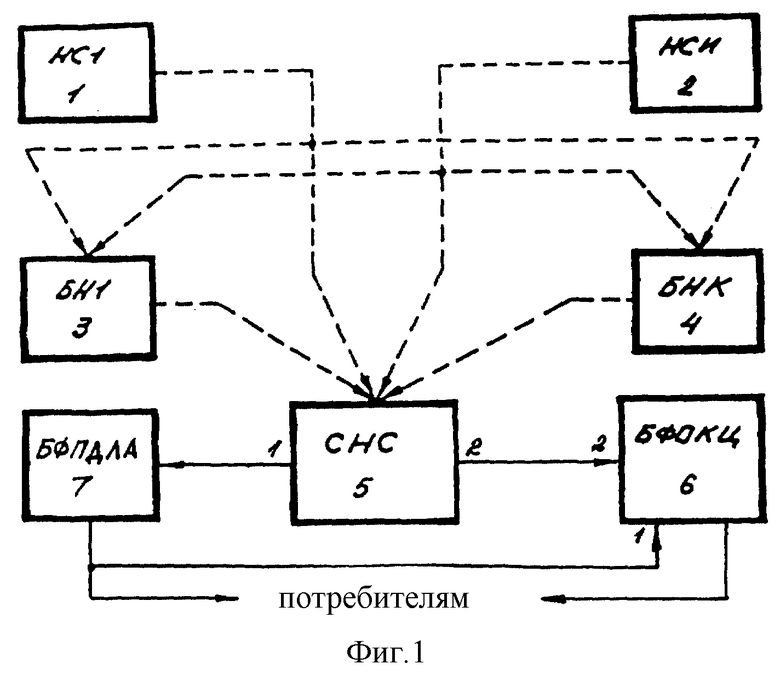
| ХАРИСОВ В.Н | |||
| и др | |||
| Глобальная спутниковая радионавигационная система ГЛОНАСС: - М.: ИПРЖР, 1998, с.50, 73-89 | |||
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
| US 4613864 А, 23.09.1986 | |||
| US 4731613 А, 15.03.1988 | |||
| US 5187485 А, 16.02.1993. | |||

