Изобретение относится к линейному приводу, содержащему держатель, корпус держателя, на котором держатель удерживается с возможностью продольного перемещения, и приводные элементы, расположенные на держателе и на корпусе держателя и используемые для обеспечения перемещения держателя и корпуса держателя друг относительно друга.
Такие линейные приводы главным образом используются в станках для обеспечения движения подачи между инструментом и обрабатываемой деталью. В особенности такие линейные приводы используются в еще новой области станков с параллельными конструкциями. Недавно появились, в частности, шестистержневые станки, в которых непосредственный станочный модуль удерживается на станочной раме шестью связями регулируемой длины. Путем целенаправленного изменения длины связей подача инструмента к обрабатываемой детали может осуществляться со всеми шестью пространственными степенями свободы, то есть с тремя поступательными и тремя вращательными степенями свободы. Станок такого типа известен, например, из патента США 5401128, в котором описаны линейные приводы связей указанного в начале описания типа.
Другие шестистержневые конструкции известны из заявок на патенты Германии 19636100.1 и 19636099.4, принадлежащих заявителю настоящей заявки.
В настоящее время современные станки должны удовлетворять высоким требованиям, предъявляемым к их способности амортизировать силы, к точности подачи и обработки и к их динамическим характеристикам. Эффективные средства контроля, необходимые для реализации новых стратегий в области механической обработки, таких как высокоскоростная механическая обработка или изготовление деталей сложных трехмерных форм, для их оптимального использования требуют новых концепций в сфере приводов, что с применением стандартных приводных элементов может осуществляться лишь в ограниченной степени.
В области линейных приводов давно известны, например, приводы шпинделей, возможности которых, однако, ограничены необходимостью преобразования вращательного движения в поступательное. Непосредственные линейные приводы, которые до сих пор применяются для перемещения планшайб или суппортов станков, в силу их массивности могут использоваться в указанных стратегиях механической обработки лишь в ограниченной степени.
Линейный электродвигатель, известный из патента США 5401128 и используемый в качестве связей регулируемой длины шестистержневого станка, также нуждается в усовершенствовании, особенно в отношении его динамических характеристик.
Следовательно, целью настоящего изобретения является создание шестистержневого станка, который имеет компактную жесткую связующую конструкцию и средства регулирования относительной длины связей и который в особенности подходит для применения в качестве высокоскоростного станка.
В шестистержневом станке указанного в начале описания типа достижение этой цели обеспечено благодаря свойствам, описанным в пункте 1 формулы изобретения.
Это позволяет получить особенно легкую, но тем не менее жесткую конструкцию, обеспечивающую благодаря своей небольшой массе большие положительные и отрицательные ускорения и, следовательно, увеличивающую максимально возможную производительность и точность обработки по сравнению с известными шестистержневыми станками.
Кроме того, средства регулирования длины связей с соответствующим линейным приводом теперь также могут быть выполнены в виде очень тонкого узла, так что при проектировании станка появляется большая свобода для расположения большого количества линейных приводов, что представляет большой интерес в области станочных модулей, в особенности в сравнительно небольших шестистержневых станках.
Приводные элементы линейного привода, то есть соответствующие магниты и катушки, расположены со стороны держателя на его внутренних поверхностях с особенно эффективным использованием пространства.
Для оптимальной компенсации сил и моментов, воздействующих на держатель из-за наличия приводных элементов, и для улучшения характеристик перемещения держателя в своей опоре в корпусе приводные элементы держателя расположены попарно на его соответствующих противоположных поверхностях.
Особенно компактный вариант выполнения получен, когда приводные элементы, то есть соответствующие катушки и магниты корпуса держателя так расположены в открытых зонах профиля поперечного сечения держателя, что они почти полностью занимают свободное пространство этого профиля; некоторые части приводных элементов при этом, несомненно, могут выходить за пределы держателя. Это относится также к конструкциям, в которых некоторые части приводных элементов корпуса держателя выдаются в открытые зоны профиля поперечного сечения держателя.
Для создания особенно легкой, но тем не менее очень жесткой конструкции держателя последний содержит две основных части U-образного профиля, которые расположены так, что их нижние стороны обращены друг к другу. Между этими сторонами в центральной зоне держателя, то есть в зоне наименьших секторных моментов инерции, расположен легкий опорный элемент, имеющий пустые полости или сквозные отверстия.
Другие предпочтительные варианты выполнения описаны в дополнительных пунктах формулы изобретения.
Для пояснения настоящего изобретения его примеры описаны ниже на основе вариантов выполнения, изображенных на чертежах, на которых:
фиг.1 изображает шестистержневый станок с шестью линейными приводами,
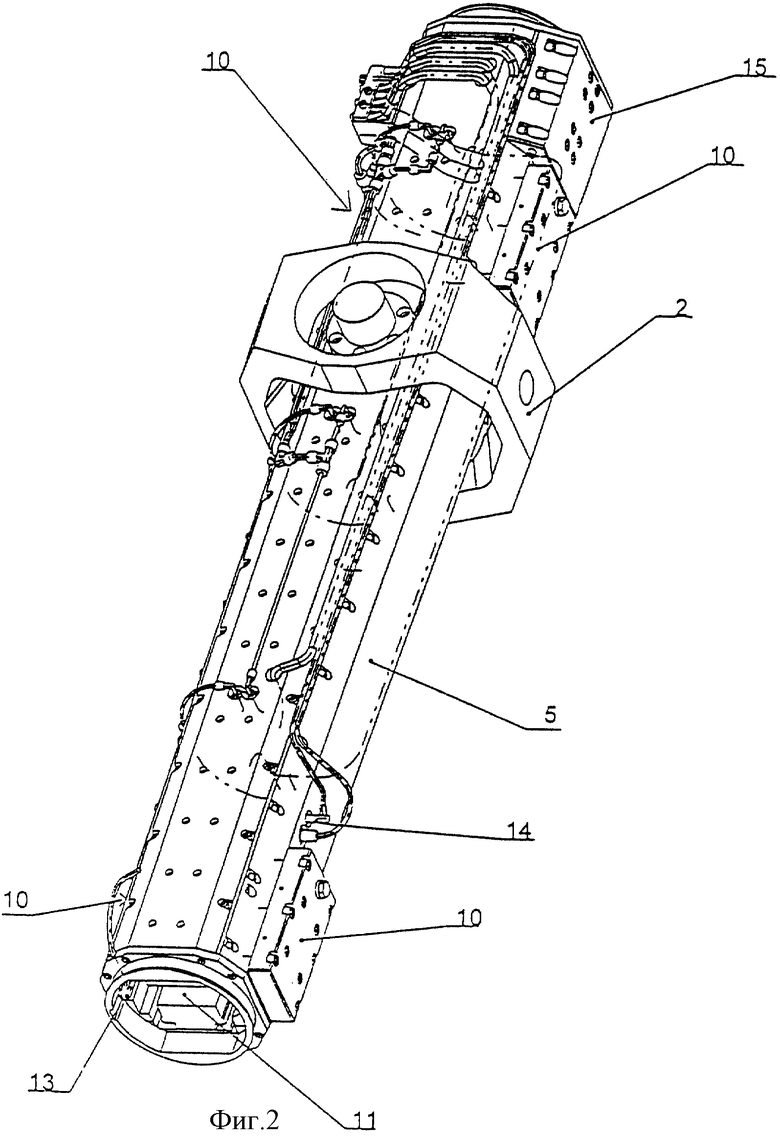
фиг.2 - внешний вид линейного привода без существующего держателя,
фиг.3 - неполный вид держателя линейного привода, показанного на фиг.2,
фиг. 4 - разрез линейного привода, показанного на фиг.2, поперечно-продольной оси, включая разрез держателя линейного привода, и
фиг. 5 - три различных варианта выполнения поперечного сечения держателя, включая расположение приводных элементов, расположенных со стороны держателя, и приводных элементов, расположенных со стороны корпуса держателя.
На фиг.1 изображен шестистержневый станок с шестью связями регулируемой длины, каждая из которых выполнена в виде электрического линейного привода. Каждая связь 1 присоединена к внешней раме станка первым шарниром 2, выполненным с возможностью перемещения со всеми тремя вращательными степенями свободы. Кроме того, каждая связь шарнирно закреплена на станочном модуле посредством второго шарнира 3, также выполненного с возможностью вращения со всеми тремя пространственными степенями свободы, причем указанный станочный модуль в этом варианте выполнения выполнен в виде узла с вращающимся шпинделем, который может выполнять, например, токарную и фрезерную обработку и сверление. Шарнирный поворот связей 1 осуществляется в двух плоскостях, расположенных на некотором расстоянии друг от друга по отношению к оси шпинделя, с обеспечением придания валу шпинделя станочного модуля большей жесткости. К тому же благодаря этому уменьшена вероятность столкновения отдельных связей друг с другом.
Ниже со ссылкой на фиг.2-4 подробно описана конструкция одной из связей, выполненной в виде линейного привода.
Линейный привод содержит держатель 4 и связанный с ним корпус 5 держателя, на котором держатель удерживается с возможностью продольного перемещения. Корпус 5 по существу имеет втулкообразную удлиненную форму, охватывающую стержневидный держатель, а внешний контур его поперечного сечения имеет по существу шестиугольную форму. Корпус 5 для обеспечения легкого доступа к его внутренней части состоит в общей сложности из четырех пластин призматического профиля поперечного сечения, проходящих в продольном направлении корпуса 5 и скрепленных между собой винтами или болтами.
Подвижный держатель 4 имеет двутавровый профиль поперечного сечения, который схематически изображен на фиг.5. Как особенно хорошо видно на фиг.4 держатель 4 состоит из нескольких составных частей с созданием, с одной стороны, достаточно жесткой конструкции, способной без каких-либо повреждающих деформаций амортизировать силы, возникающие в станочном модуле, а с другой стороны, легкой конструкции с тем, чтобы груз, который необходимо перемещать, был небольшим, и с обеспечением хороших динамических характеристик линейного привода. Для этого держатель, изображенный на фиг.4, содержит две стержневидных основных части U-образного профиля, проходящих вдоль продольной оси держателя, которая в свою очередь проходит перпендикулярно плоскости фиг. 4. Между нижними сторонами этих профилированных основных частей расположен легкий опорный элемент 7, имеющий между соответствующими перегородками отверстия, особенно хорошо видные на фиг.3. Продольные краевые части легкого опорного элемента выполнены в виде более прочных полос.
Кроме того, к внешним поверхностям держателя 4 прикреплены направляющие элементы, которые имеют соответствующие направляющие части и выступы которых выдаются в пространство между указанными нижними сторонами основных частей держателя, причем держатель опирается на корпус 5 этими направляющими частями. Направляющие элементы 8 также могут быть расположены непосредственно на тонкостенном, решетчатом элементе 7 на его краевых полосах, причем в этом случае может быть достигнута большая точность по сравнению с отдельными направляющими, присоединенными крепежными средствами. Альтернативно, направляющие элементы могут быть выполнены в виде отдельных деталей, а также в виде единого целого на указанных основных частях U-образного профиля держателя.
Полки соответствующего U-образного профиля несколько отличаются по длине. Соответствующая нижняя полка на фиг.4 немного длиннее и проходит в продольную канавку, выполненную на внутренней стенке корпуса.
В варианте выполнения, изображенном на фиг.2-4, элементы 8 расположены на двух противоположных внешних поверхностях двутаврового поперечного сечения, причем один направляющий элемент выполнен с образованием единого целого с неподвижной опорой между держателем и корпусом держателя, которая имеет направляющие поверхности для роликов, прикрепленных к корпусу 5. Вместо роликов возможно также применение других линейных направляющих средств с элементами качения или без них. Опора, расположенная на противоположной стороне, выполнена в виде направляющих средств подвижно-опорного типа с обеспечением предотвращения напряжения, вызываемого большими силами в направляющих элементах. В варианте выполнения, изображенном на фиг.4, эта подвижная опора выполнена в виде профилированной направляющей. Наряду с размещением направляющих средств с обеих сторон держателя возможно также их размещение с одной его стороны.
Для перемещения держателя 4, выполненного с возможностью выдвижения с обеих сторон корпуса 5, держатель и корпус держателя имеют расположенные на них приводные элементы, например электромеханические элементы 6 и 11, выполненные в виде катушек или магнитов, обеспечивающих возможность непосредственного электропривода. Различные варианты выполнения расположения этих приводных элементов 6 и 11 изображены на фиг.5а-с. Сначала подробно со ссылкой на фиг. 4 рассмотрен вариант выполнения, соответствующий фиг.5с. Элемент 6, находящийся со стороны держателя, расположен в зоне центральной перегородки двутаврового поперечного сечения, точнее в соответствующих углублениях на нижних сторонах U-образных частей 9. Для предотвращения моментов, действующих на держатель относительно направления его перемещения, два соответствующих приводных элемента 6 расположены друг напротив друга. В целом вдоль продольной оси на держателе 4 расположено большое количество таких пар приводных элементов 6 (двухкамерное расположение). Со стороны корпуса 5 приводные элементы 11 прикреплены к нему так, что они находятся напротив приводных элементов 6, расположенных со стороны держателя, при этом приводные элементы 11, находящиеся со стороны корпуса, расположены в регулярном порядке противоположными парами, симметрично относительно продольной оси. Элементы 11, расположенные со стороны корпуса, выполнены так, что они почти полностью занимают открытую зону профиля поперечного сечения держателя 4, благодаря чему получена особенно компактная конструкция. Кроме того, приводные элементы, расположенные со стороны корпуса, прикреплены винтами или болтами к внутренней стенке соответствующей пластины корпуса вдоль продольной оси, так что при демонтаже этой пластины одновременно могут быть демонтированы и приводные элементы 11, расположенные со стороны корпуса.
В другом варианте выполнения, изображенном на фиг.5b, приводные элементы 6, находящиеся со стороны держателя, расположены на внутренних сторонах внешних полок двутаврового профиля поперечного сечения. В этом случае соответствующие противоположные приводные элементы, расположенные со стороны корпуса, выдаются в открытую зону поперечного сечения, то есть между полками двутаврового поперечного сечения. В варианте выполнения, изображенном на фиг. 5b, перемещение держателя 4 по корпусу 5 может направляться так же, как на фиг.4.
В третьем варианте выполнения приводные элементы 6, находящиеся со стороны держателя, расположены соответствующими противоположными парами на внешних сторонах внешних полок двутаврового поперечного сечения. В этом случае в открытых зонах двутаврового поперечного сечения могут быть расположены направляющие средства для держателя 4 с созданием особенно компактной конструкции.
Для целенаправленного регулирования линейного привода в продольном направлении необходимо определять положение держателя 4 относительно корпуса 5. Для этого имеется линейное измерительное устройство, содержащее измерительную головку 13, прикрепленную к корпусу 5 и расположенную предпочтительно на одном его конце. Кроме того, линейное измерительное устройство содержит разметочные средства, расположенные на держателе и выполненные с образованием единого целого с направляющей, которая, когда линейный привод установлен, предпочтительно образует верхнюю направляющую. Более того, имеются предохранительные элементы, предотвращающие полное выдвижение держателя 4 из корпуса 5. Эти предохранительные элементы могут быть как электрическими, так и механическими. В изображенном варианте выполнения на одном конце корпуса в качестве предохранительного элемента установлен концевой выключатель 14, тогда как на другом конце корпуса в качестве средств предотвращения выпадения держателя 4 из корпуса расположено механическое предохранительное устройство 15.
Описанный линейный привод может использоваться для различных назначений, но главным образом он подходит для использования в приводных осях параллельных конструкций, таких как шестистержневые конструкции.



Изобретение относится к области станкостроения, стержневым станкам. Привод выполнен в виде средства регулирования длины связей шестистержневого станка, соединенных станочным модулем. Каждый привод состоит из держателя, установленного с возможностью перемещения в его корпусе. Для создания высокоскоростного шестистержневого станка с жесткой конструкцией он снабжен линейным измерительным устройством, расположенным на внешней стороне держателя, и измерительной головкой, расположенной на корпусе держателя. Держатель выполнен с открытым профилем поперечного сечения. 11 з.п. ф-лы, 5 ил.
| US 5401128, 28.03.1995 | |||
| Линейный электродвигатель | 1971 |
|
SU448558A1 |
| Стенд для испытания и аттестации промышленных роботов | 1988 |
|
SU1562130A1 |
| Обрабатывающее устройство | 1989 |
|
SU1691092A1 |
| УНИВЕРСАЛЬНЫЙ КОЛЛЕКТОРНЫЙ ЭЛЕКТРОМЕХАНИЗМ СМИРНОВА | 1993 |
|
RU2100891C1 |
| JP 06070534, 11.03.1994. | |||

