Изобретение относится к машиностроению, а именно к робототехнике, и может быть использовано для оценки качества промышленных роботов.,
Цель изобретения - повышение точности измерения путем использования жесткой кинематической связи между исполнительным органом и датчиками положения,to
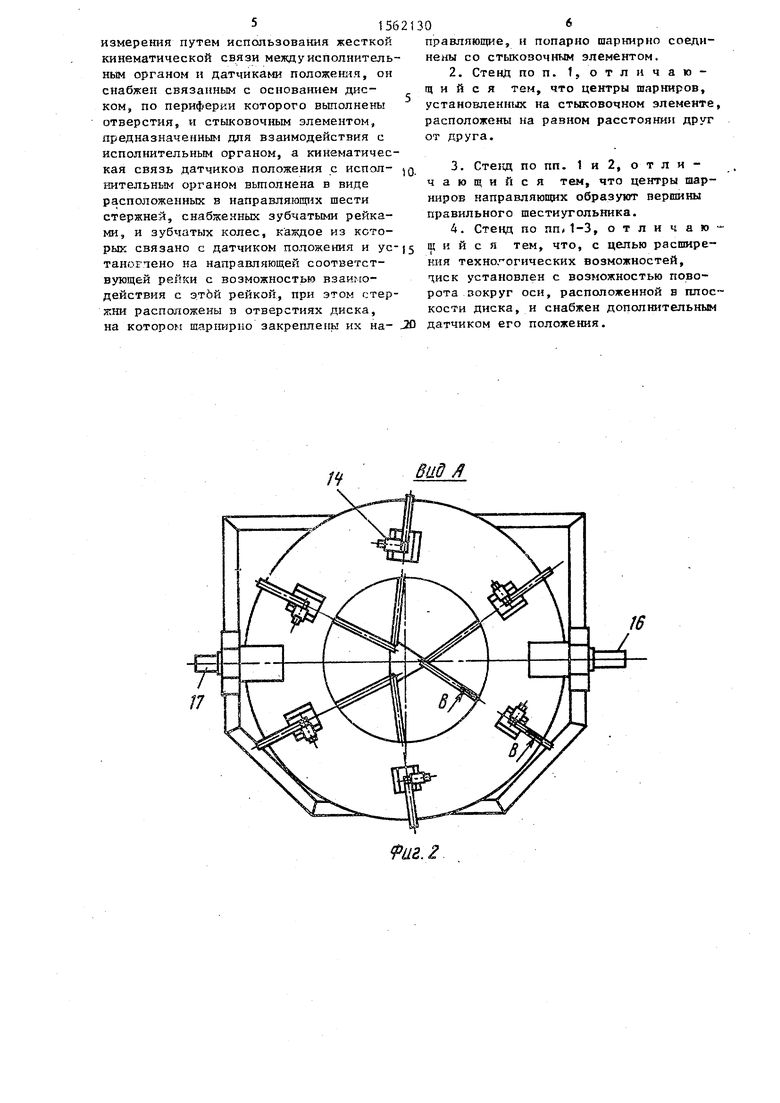
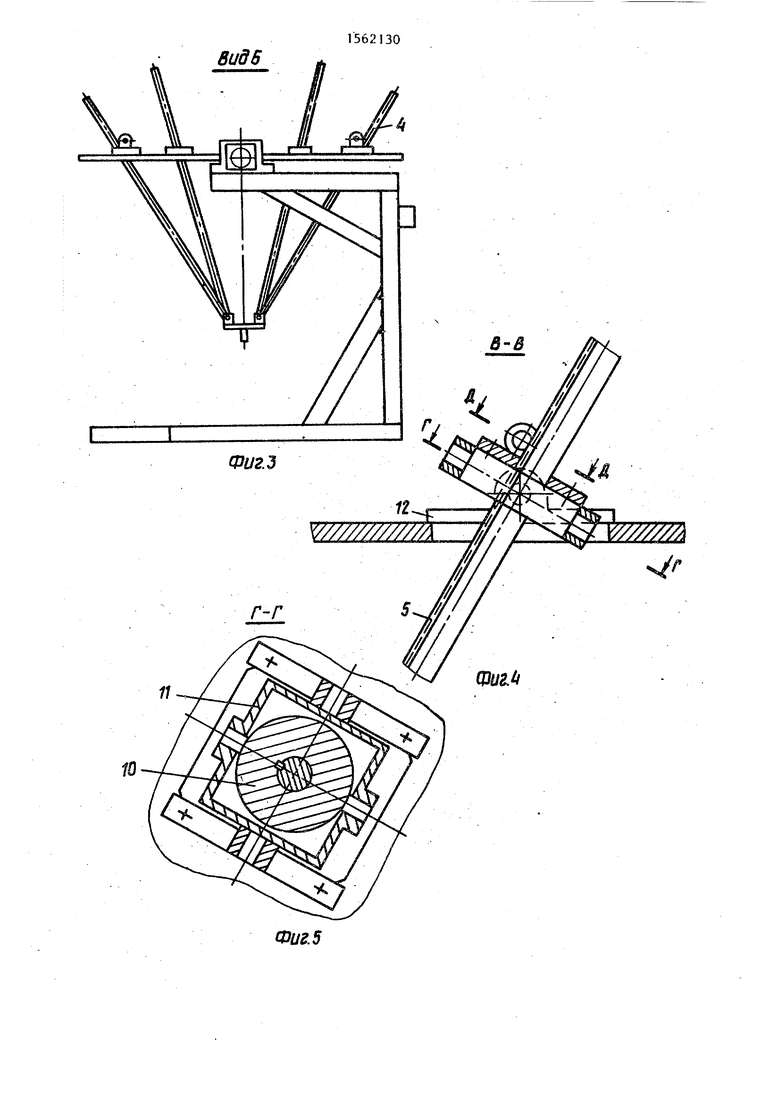
На фиг. 1 изображен стенд, общий вид на фиг. 2 - вид А на фиг.1j на фиг. 3 - вид В на фиг.1; на фиг. 4 - разрез В-В на фиг.2; на фиг.5 - разрез Г-Г на фиг.4; на фиг.6 - разрез J5 Д-Д на фиг.4,« на фиг.7 - узел I на фиг.1; на фиг.8 - разрез Е-Е на фиг.7.
Стенд содержит ферму 1, на верхних балках которой соосно установлены два подшипниковых узла 2, в подшипни- О
Јсах установлены оси поворотного диска 3. По периферии поворотного диска 3 на равном расстоянии-друг от друга расположены шесть одинаковых отверстий, сквозь которые пропущены шесть 25 одинаковых стержней 4, снабженные зубчатой рейкой 5. Нижние концы стержней несут вилки 6, которые попарно шарнирно установлены на оси крестовины 7. Каждая из трех крестовин 7 , шарнирно соединена с вилкой 8, которая свободно установлена на вертикальной оси в стыковочном элементе 9.Вер-1 тикальные оси вилок 8 расположены на стыковочном элементе 9 в вершинах равностороннего треугольника.
Верхняя часть каждого стержня 4 с рейкой 5 размещена в центральном направляющем отверстии диска 10, который шарнирно установлен в рамке 11 так, что центры этих шарниров образуют правильный шестиугольник. Рамка 11 установлена в подшипниковом узле 12 на поворотном диске 3.
На фланце каждого диска 10 закреп- 4 лен корпус 13, в котором установлен датчик 14 положения. Шестерня 15, установленная на валу датчика 14 положения, введена в зацепление с зубчатой рейкой 5.C
С одной стороны к оси поворотного диска 3 присоединен электродвигатель 16, с другой стороны - датчик 17 положения .
Стенд работает следующим образом. Испытуемый образец промышленного робота устанавливается перед стендом и программируется так, чтобы его первым движением был подход к стыковочно3
5
О
5 «
0
5 CQ
5
му элементу 9 и захват стержня, предусмотренного на нем. Далее записывается тест-программа робота, и он включается в работу в автоматическом режиме. Стыковочный элемент 9, удерживаемый в схвате робота движется вместе с ним, заставляя стержни 4 перемещаться вдоль своих осей. Шарнирные соединения стержней 4 со стыковочным элементом 9 и поворотным диском 3 позволяют захвату робота беспрепятственно двигаться по заданной траектории.
Непрерывное в процессе испытания измерение шести линейных координат - шести длин стержней - с помощью шести датчиков 14 положения позволяет получать траекторию движения геометрического центра стыковочного элемента 9 или координаты этого центра в любой момент времени и ориентацию стыковочного элемента 9 в пространстве. Получаемые текущие значения шести линейных координат дают возможность пересчитать их в любой традиционной системе координат: прямоугольной, цилиндрической, сферической.
Если необходимо испытать движения робота в плоскости, существенно отличной от горизонтальной, робот устанавливается сбоку от стенда, и диск 3 поворачивается на заданный угол от двигателя 16, угол поворота при этом измеряется датчиком 17 положения . При испытаниях возможно одновременное движение робота и диска 3. В этом режиме имитируется работа робота с подвижным вспомогательным оборудованием, например сварочным манипулятором.
Таким образом, в результате введения в стенд жесткой кинематической связи между исполнительным органом и измерительной системой существенно повышается точность измерения.
Кроме того, облегчается обработка полученных результатов и повышается их достоверность.
Формула изобретения
1. Стенд для испытания и аттестации промышленных роботов, содержащий соединенные с основанием датчики положения, кинематически связанные с исполнительным органом испытуемого объекта, отличающийся тем, что, с целью повышения точности
515621
измерения путем использования жесткой кинематической связи между исполнительным органом и датчиками положения, он снабжен связанным с основанием диском, по периферии которого выполнены отверстия, и стыковочным элементом, предназначенным для взаимодействия с исполнительным органом, а кинематическая связь датчиков положения с испол- jg пительным органом выполнена в виде расположенных в направляющих шести стержней, снабженных зубчатыми рейками, и зубчатых колес, каждое из которых связано с датчиком положения и ус-15 тановпено на направляющей соответствующей рр.йки с возможностью взаимодействия с этбй рейкой, при этом стержни расположены в отверстиях диска, на котором шар пир но закреплены их на- -20
0
правляющие, и попарно шаркирно соединены со стыковочным элементом,
2.Стенд по п. 1, отличающийся тем, что центры шарниров, установленных на стыковочном элементе, расположены на равном расстоянии друг от друга.
3.Стенд по пп. 1 и 2, о т л и - чающийся тем, что центры шарниров направляющих образуют вершины правильного шестиугольника.
4.Стенд по , отличающийся тем, что, с целью расширения технологических возможностей, чиск установлен с возможностью поворота вокруг оси, расположенной в плоскости диска, и снабжен дополнительным датчиком его положения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ МОБИЛЬНЫЙ ПРОСТРАНСТВЕННЫЙ РОБОТ-МАНИПУЛЯТОР ДЛЯ ПРОТЕЗИРОВАНИЯ ВЕРХНЕЙ КОНЕЧНОСТИ ПАЦИЕНТА И СПОСОБ ОБСЛУЖИВАНИЯ ПАЦИЕНТА ПОСРЕДСТВОМ АДАПТИВНОГО МОБИЛЬНОГО ПРОСТРАНСТВЕННОГО РОБОТА-МАНИПУЛЯТОРА | 2020 |
|
RU2738859C1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Сервисный мобильный робот и комплект монтируемых на обслуживаемых объектах устройств для обмена сменными модулями и жидкими материалами | 2023 |
|
RU2840834C2 |
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Захват манипулятора | 1990 |
|
SU1779582A1 |
| Промышленный робот | 1986 |
|
SU1371896A1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2009 |
|
RU2398671C1 |
| ЭЛЕКТРОПРИВОД РОБОТА | 2010 |
|
RU2424894C1 |
| Рука манипулятора | 1982 |
|
SU1166989A1 |

Изобретение относится к машиностроению, а именно к робототехнике, и может быть использовано для оценки качества промышленных роботов. Целью изобретения является повышение точности измерения путем использования жесткой кинематической связи между исполнительным органом и датчиками положения. Стенд содержит датчики положения 14, стыковочный элемент 9, диск 3 с отверстиями по периферии, помещенные в эти отверстия с возможностью перемещения шесть стержней 4, каждый из которых снабжен зубчатой рейкой. Стержни 4 попарно шарнирно соединены со стыковочным элементом 9. Стыковочный элемент 9, удерживаемый в схвате испытуемого образца промышленного робота, движется вместе с ним, заставляя стержни 4 перемещаться вдоль своих осей. Шарнирные соединения стержней 4 со стыковочным элементом 9 и диском 3 позволяют схвату робота беспрепятственно двигаться по заданной траектории. Изменение шести линейных координат - шести длин стержней - с помощью шести датчиков положения 14 позволяет получить траекторию движения геометрического центра стыковочного элемента 9. 3 з.п. ф-лы, 8 ил.
17
ВиО Л
16
Фиг. 2
Видб
Фиг.з
W///////////Afi -
r-r
11
Фиг. 5
1562130
п
N/
Фиг
Фиг.&
| Стенд для испытания роботов-манипуляторов | 1984 |
|
SU1171308A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
