Изобретение относится к области сельскохозяйственного машиностроения, в частности к устройствам для автоматического вождения машинно-тракторных агрегатов.
Наиболее близким к предлагаемому изобретению по совокупности существенных признаков является устройство для автоматического вождения машинно-тракторного агрегата, содержащее копирующий щуп, датчик сигнала рассогласования, имеющий подвижный и неподвижные контакты, электрогидравлический распределитель, исполнительный гидроцилиндр и подпружиненные гибкие элементы (авторское свидетельство СССР 869595, кл. А 01 В 69/04, 07.10.87 г. Бюллетень 37).
В известном устройстве для автоматического вождения машинно-тракторного агрегата возврат колес в нейтральное положение после прекращения управляющего воздействия от сигнала рассогласования и фиксация их в этом положении до следующего управляющего воздействия осуществляется силой предварительно растянутой пружины, действующей на поворотные рычаги управляемых колес через две ветви гибкого элемента. Такое конструктивное решение приводит к повышенному износу рулевого механизма и повышению усилий на рулевом колесе при ручном управлении агрегатом на разворотах и на транспорте.
Сущность изобретения заключается в том, что подпруженные гибкие элементы соединены с золотником электрогидравлического распределителя, а корпус распределителя через тягу обратной связи соединен с поворотным рычагом управляемых колес. При этом подпружиненные гибкие элементы после прекращения управляющего воздействия от сигнала рассогласования возвращают в нейтральное положение золотник электрогидравлического распределителя, и управляемые колеса возвращаются в нейтральное положение исполнительным гидроцилиндром рулевого механизма и фиксируются в этом положении в результате взаимодействия поворотного рычага управляемых колес через тягу обратной связи с корпусом электрогидравлического распределителя.
На чертеже изображена общая схема устройства для автоматического вождения машинно-тракторного агрегата.
Устройство содержит (см. чертеж) копирующий щуп 1, связанный с подвижным контактом 2 датчика сигнала рассогласования 3, на корпусе которого закреплены неподвижные контакты 4 и 5. Контакты 2, 4 и 5 датчика сигнала рассогласования 3 электрически соединены через электрический переключатель 6 с источником питания 7 и с электромагнитами 8 и 9 электрогидравлического распределителя 10, содержащего золотник 11 и корпус 12, механически связанный через тягу обратной связи 13 с поворотным рычагом 14 управляемых колес 15. Золотник 11, находящийся в нейтральном положении относительно корпуса 12 через шток 16 и через гибкие элементы 19 и 20 соединен с предварительно натянутой пружиной 21. При этом управляемые колеса 15 находятся в нейтральном положении. Шток 16 через винтовую передачу 17 соединен с рулевым валом 18. Исполнительный гидроцилиндр 22 через золотник 11 соединен гидромагистралями через регулятор потока 23 с насосом 24 и гидробаком 25.
Устройство для автоматического вождения машинно-тракторного агрегата работает следующим образом.
В начале рабочего гона копирующий щуп 1 вводится в бороздку от предыдущего прохода агрегата и переключателем 6 устройство включается в режим автоматического вождения.
При отклонении агрегата от заданной прямолинейной траектории движения, например влево, замыкаются контакты 2 и 4 датчика сигнала рассогласования 3. Сигнал рассогласования поступает на электромагнит 9, который смещает золотник 11 вверх (по чертежу), при этом сила растяжения пружины 21 через гибкий элемент 19 передается на золотник 11, а гибкий элемент 20 прослабляется. При смещении золотника 11 вверх (по чертежу) штоковая полость исполнительного гидроцилиндра 22 соединяется напорной гидромагистралью через регулятор потока 23 с насосом 24, и управляемые колеса 15 поворачиваются вправо, т.е. в сторону ликвидации сигнала рассогласования. При выходе агрегата на заданный курс контакты 2 и 4 датчика 3 размыкаются, электромагнит 9 отключается, и золотник 11 силой растяжения пружины 21 через гибкий элемент 19 возвращается в нейтральное положение, соединяя с напорной гидромагистралью бесштоковую полость исполнительного гидроцилиндра 22, который поворачивает управляемые колеса в положение прямолинейного движения. При повороте колес через поворотный рычаг 14 и тягу обратной связи 13 корпус 12 электрогидравлического распределителя 10 смещается относительно неподвижного золотника 11. При достижении управляемыми колесами 15 нейтрального положения корпус 12 занимает нейтральное положение относительно золотника 11, отключая полости исполнительного гидроцилиндра 22 от напорной и сливной гидромагистралей, при этом управляемые колеса 15 фиксируются в нейтральном положении до следующего управляющего воздействия от сигнала рассогласования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения машинно-тракторного агрегата | 1980 |
|
SU869595A1 |
| УСТРОЙСТВО КОРРЕКЦИИ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА ПОПЕРЕК СКЛОНА | 2001 |
|
RU2195097C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ МОБИЛЬНЫХ АГРЕГАТОВ | 2001 |
|
RU2224396C2 |
| ГИДРООБЪЕМНОЕ РУЛЕВОЕ УПРАВЛЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2180633C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ДАТЧИКА СИГНАЛА РАССОГЛАСОВАНИЯ | 2001 |
|
RU2202160C2 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| Устройство автоматического вождения сельскохозяйственного агрегата | 1982 |
|
SU1042638A1 |
| Устройство для автоматического направления движения тракторного агрегата | 1978 |
|
SU710538A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ КОЛЕСАМИ ПРИЦЕПНОГО ЗВЕНА АВТОПОЕЗДА | 1991 |
|
RU2033361C1 |
Устройство содержит копирующий щуп, датчик сигнала рассогласования, имеющий подвижный и неподвижные контакты, электрогидравлический распределитель, исполнительный гидроцилиндр и подпружиненные гибкие элементы. Подпружиненные гибкие элементы соединены с золотником электрогидравлического распределителя. Корпус электрогидравлического распределителя через тягу обратной связи соединен с поворотным рычагом управляемых колес. Уменьшается износ рулевого механизма и усилий на рулевое колесо при ручном управлении агрегатом. 1 ил.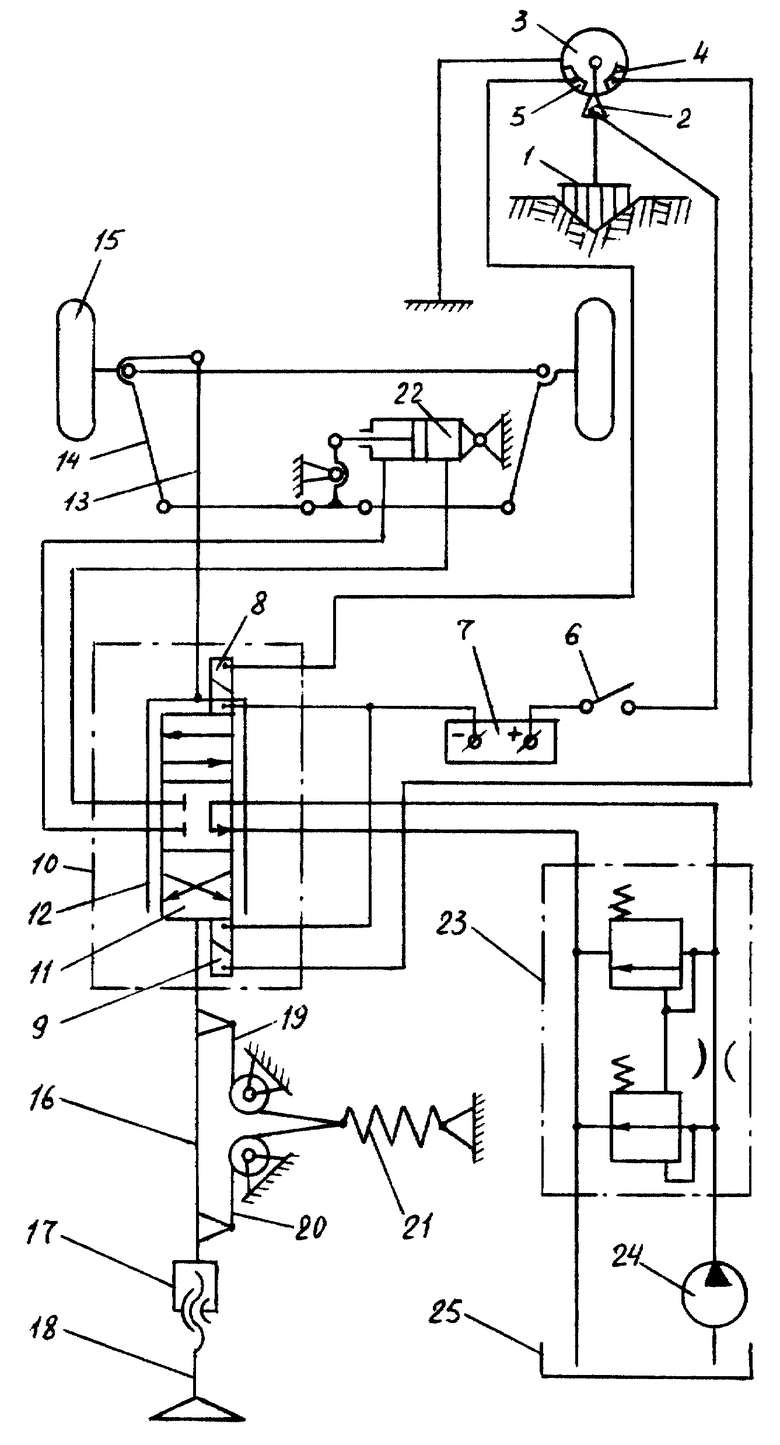
Устройство для автоматического вождения машинно-тракторного агрегата, содержащее копирующий щуп, датчик сигнала рассогласования, имеющий подвижный и неподвижные контакты, электрогидравлический распределитель, исполнительный гидроцилиндр и подпружиненные гибкие элементы, отличающееся тем, что подпружиненные гибкие элементы соединены с золотником электрогидравлического распределителя, а корпус электрогидравлического распределителя через тягу обратной связи соединен с поворотным рычагом управляемых колес.
| Устройство для автоматического вождения машинно-тракторного агрегата | 1980 |
|
SU869595A1 |
| Устройство автоматического вождения сельскохозяйственного агрегата | 1982 |
|
SU1042638A1 |
| Устройство для управления самоходной сельскохозяйственной машиной | 1977 |
|
SU631101A1 |
| Устройство для автоматического вождения самоходной сельскохозяйственной машины | 1982 |
|
SU1017179A1 |

