Изобретение относится к области автоматического вождения сельскохозяйственных мобильных агрегатов.
Наиболее близким к предлагаемому изобретению по совокупности существенных признаков является способ автоматического вождения сельскохозяйственных мобильных агрегатов со стабилизацией управляемых колес в нейтральном положении, включающий контроль отклонения от заданной траектории и выдачу команды на поворот управляемых колес после выключения механизма стабилизации, а также сравнение длительности сигналов рассогласования разных знаков и в случае действия на агрегат установившегося возмущения смещение нейтрали механизма стабилизации управляемых колес на определенную величину и соответственно поворот колес на некоторый угол, создающий восстанавливающий момент и являющийся новым нулевым положением колес, относительно которого отрабатываются сигналы ошибки (авт.cв. СССР 1389699, М.кл. А 01 В 69/04. Бюл. 15, 23.04.88).
При известном способе автоматического вождения сельскохозяйственных мобильных агрегатов повышается точность автоматического вождения сельскохозяйственного мобильного агрегата путем устранения влияния установившегося возмущения, при этом не учитывается смещение задней оси трактора с сельскохозяйственным орудием вниз по склону относительно базовой линии при автоматическом вождении в поперечном направлении склона, что приводит к подрезанию культурных растений и искривлению зависимых базовых линий.
Сущность изобретения заключается в том, что при автоматическом вождении сельскохозяйственного мобильного агрегата со стабилизацией управляемых колес в нейтральном положении осуществляется контроль отклонения агрегата от заданной траектории движения под действием случайных возмущений, и при появлении сигнала об отклонении агрегата вправо или влево от заданной траектории выдается команда на поворот управляемых колес, которые после отключения механизма стабилизации поворачиваются на некоторый угол в сторону ликвидации отклонения. После ликвидации отклонения агрегата от заданной траектории движения управляемые колеса стабилизируются в нейтральном положении. В случае действия на агрегат установившегося возмущения в одну сторону (вправо или влево) длительность сигнала одного из знаков, создаваемого установившимся возмущением, превышает длительность сигнала, имеющего место при случайных возмущениях, путем сравнения длительности этих сигналов осуществляется смещение нейтрали механизма стабилизации управляемых колес, которые удерживаются стабилизатором, повернутым под некоторым углом в сторону, противоположную действию установившегося возмущения, в результате чего устраняется действие установившегося возмущения, что, в свою очередь, повышает точность автоматического вождения, однако в случае автоматического вождения агрегата в поперечном направлении склона имеет место подрезание культурных растений при междурядной обработке и искривление зависимых базовых линий при посеве и пахоте в результате смещения центра задней оси агрегата с сельскохозяйственным орудием вниз по склону относительно базовой линии под действием боковой составляющей силы тяжести агрегата.
С целью устранения смещения агрегата вниз по склону относительно базовых линий, а следовательно, и устранения подрезания культурных растений и искривления зависимых базовых линий при автоматическом вождении в поперечном направлении склона с маятника одного из элементов сравнения сигнал о величине его отклонения подают на вход преобразующего элемента, в котором сигнал о величине углового отклонения маятника преобразуют в линейное перемещение щупа вниз по склону на величину, пропорциональную углу поперечного уклона, для смещения агрегата вверх по склону до такого положения его относительно базовой линии, какое он занимает при движении на ровном участке поля.
На чертеже представлена функциональная схема системы автоматического вождения сельскохозяйственного мобильного агрегата.
Система состоит из трех контуров регулирования.
Первый - основной контур регулирования по отклонению регулируемой величины - состоит из элемента 1 сравнения, представляющего собой копирующий щуп, преобразующего элемента 2, представляющего собой трехпозиционный датчик сигнала рассогласования, преобразующего элемента 3, представляющего собой электрогидравлический золотник, исполнительного элемента 4, представляющего собой гидравлический сервомотор руля, объекта 5 управления (мобильный агрегат) и обратной связи 6.
Второй - дополнительный контур регулирования по отклонению регулируемой величины - состоит из элемента 7 сравнения, выполненного аналогично датчику сигнала рассогласования, ось которого имеет механическую связь с поворотным валом рулевого механизма и с преобразующим элементом 8, представляющим собой электрический переключатель, элемента 9 сравнения, выполненного в виде транзисторного ключа, элемента 10 сравнения релейного типа, электрически связанного с задатчиком 11, и преобразующего элемента 12, представляющего собой реверсивный электродвигатель, вал которого связан с подстроечным механизмом элемента 7 сравнения.
Третий - дополнительный контур регулирования по поперечному склону состоит из элемента сравнения 13, представляющего собой маятниковый датчик крена объекта управления 5 (мобильного агрегата), соединенный с преобразующим элементом 14, который представляет собой передаточный рычажный механизм, связанный с элементом сравнения 1.
В случае действия на мобильный агрегат случайного возмущения отклонение точки копирования от заданной траектории измеряется элементом 1 сравнения, угловое отклонение которого от среднего положения преобразуется преобразующим элементом 2 в электрический сигнал рассогласования, поступающий одновременно в дополнительный контур регулирования на элементы 9 и 10 сравнения и в основной контур регулирования на вход преобразующего элемента 3, в котором преобразуется в механическое перемещение гидрозолотника. В исполнительном элементе 4 перемещение золотника преобразуется в поворот управляемых колес на некоторый угол, в сторону ликвидации отклонения от заданной траектории, который является входом объекта 5 управления. С объекта 5 управления выходная величина через обратную связь 6 поступает на элемент 1 сравнения. Выходная величина исполнительного элемента 4 поступает также на элемент 7 сравнения, выход которого преобразуется преобразующим элементом 8 в электрический сигнал стабилизации, равный по величине сигналу рассогласования. В элементе 9 сравнения из сигнала рассогласования вычитается сигнал стабилизации. Поэтому при наличии сигнала рассогласования с элемента 9 сравнения на выход преобразующего элемента 3 сигнал не поступает.
После ликвидации рассогласования с элемента 9 сравнения на преобразующий элемент 3 поступает сигнал стабилизации противоположного знака, при этом управляемые колеса поворачиваются в нейтральное положение. При угле поворота колес, равном нулю, сигнал стабилизации прекращается, и колеса остаются в нейтральном положении до появления следующего сигнала рассогласования. Сигнал рассогласования одновременно с основным контуром регулирования поступает также на элемент 10 сравнения дополнительного контура регулирования по возмущению. А так как длительность сигнала рассогласования от случайного возмущения не превышает установленной задатчиком 11 длительности сигнала задатчика, величина которого равна сигналу ошибки, имеющему место при случайных возмущениях, то выходная величина элемента 10 сравнения и соответственно выходная величина преобразующего элемента 12 равны нулю.
В этом случае нулевое положение элемента 7 сравнения соответствует нейтральному положению управляемых колес, совпадающему с продольной осью агрегата.
В случае действия на агрегат установившегося возмущения, например асимметрия крюковой нагрузки, поперечные уклоны и др., на элемент 10 сравнения поступает сигнал рассогласования определенного знака, длительность которого в данном случае превышает длительность сигнала задатчика 11. В элементе 10 сравнения из сигнала рассогласования вычитается сигнал задатчика 11. Разность этих сигналов преобразуется элементом 12 во вращение вала электродвигателя на угол коррекции, который в элементе 7 сравнения суммируется с углом поворота колес. Эта сумма углов преобразуется преобразующим элементом 8 в электрический сигнал, который поступает на элемент 9 сравнения пока имеется сигнал рассогласования, выходная величина элемента 9 сравнения равна нулю. Как только прекращается управляющее воздействие, т.е. когда сигнал рассогласования равен нулю, с элемента 9 сравнения на выход преобразующего элемента 3 поступает электрический сигнал противоположного знака, который преобразующим элементом 3 и исполнительным элементом 4 преобразуется в поворот управляемых колес в нейтральное положение. При этом колеса будут поворачиваться до тех пор, пока выходная величина элемента 7 сравнения не станет равной нулю. При нулевом значении выхода элемента 7 сравнения сигнал на выходе элемента 9 сравнения прекращается, и управляемые колеса занимают новое нейтральной положение, смещенное от продольной оси мобильного агрегата на угол коррекции, который создает восстанавливающий момент, нейтрализующий действие на агрегат установившегося возмущения и относительно которого отрабатываются сигналы ошибки.
В случае автоматического вождения сельскохозяйственного мобильного агрегата в поперечном направлении склона с элемента сравнения 13 выдается информация о величине угла склона в виде отклонения маятника, который в преобразующем элементе 14 с помощью передаточного рычажного механизма преобразуется в линейное перемещение элемента сравнения 1 (щупа) вниз по склону относительно продольной оси агрегата на величину, пропорциональную углу поперечного уклона, в результате чего агрегат смещается вверх по склону относительно базовой линии (рядка растений, борозды) на величину, компенсирующую смещение его вниз по склону, под действием боковой составляющей силы тяжести агрегата, при этом рабочие органы агрегата занимают относительно базовой линии положение, соответствующее движению его на ровном участке поля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического вождения сельскохозяйственных мобильных агрегатов | 1985 |
|
SU1389699A1 |
| Устройство автоматического вождения сельскохозяйственного агрегата | 1982 |
|
SU1042638A1 |
| Способ управления мобильным агророботом | 1986 |
|
SU1393334A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ДАТЧИКА СИГНАЛА РАССОГЛАСОВАНИЯ | 2001 |
|
RU2202160C2 |
| Устройство для автоматического вождения машинно-тракторного агрегата | 1980 |
|
SU869595A1 |
| УСТРОЙСТВО КОРРЕКЦИИ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА ПОПЕРЕК СКЛОНА | 2001 |
|
RU2195097C1 |
| Способ автоматического вождения самоходной машины и устройство для его осуществления | 1989 |
|
SU1748682A1 |
| Устройство для автоматического вождения самоходного агрегата | 1988 |
|
SU1605953A1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
Способ включает контроль отклонения от заданной траектории и выдачу команды на поворот управляемых колес после выключения механизма стабилизации, а также смещения нейтрали механизма стабилизации управляемых колес путем сравнения длительности сигнала одного из знаков, создаваемого установившимся возмущением над длительностью сигнала ошибки, имеющего место при случайных возмущениях. При автоматическом вождении сельскохозяйственного мобильного агрегата в поперечном направлении склона с маятника одного из элементов сравнения сигнал о величине его отклонения подают на вход преобразующего элемента, в котором сигнал о величине углового отклонения маятника преобразуют в линейное перемещение щупа вниз по склону на величину, пропорциональную углу поперечного уклона, для смещения агрегата вверх по склону. Устраняется смещение агрегата вниз по склону. 1 ил.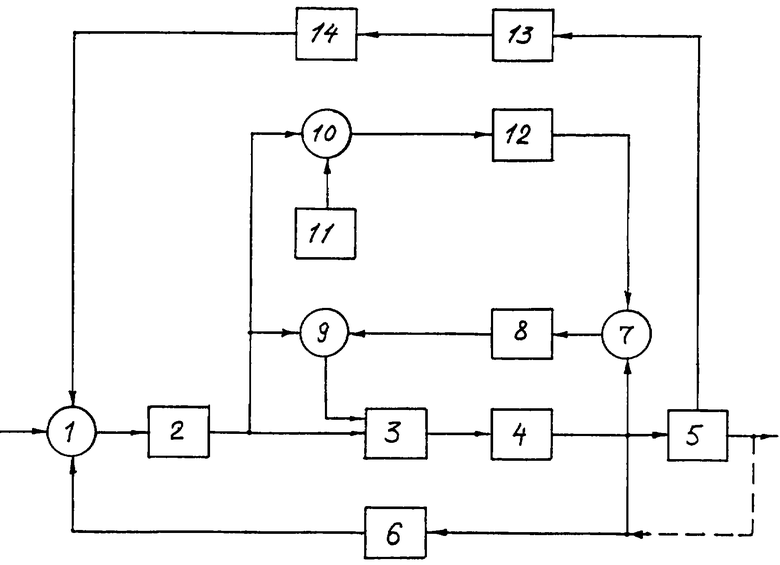
Способ автоматического вождения сельскохозяйственных мобильных агрегатов со стабилизацией управляемых колес в нейтральном положении, включающий контроль отклонения от заданной траектории и выдачу команды на поворот управляемых колес после выключения механизма стабилизации, а также смещения нейтрали механизма стабилизации управляемых колес, путем сравнения длительности сигнала одного из знаков, создаваемого установившимся возмущением над длительностью сигнала ошибки, имеющего место при случайных возмущениях, отличающийся тем, что при автоматическом вождении сельскохозяйственного мобильного агрегата в поперечном направлении склона с маятника одного из элементов сравнения сигнал о величине его отклонения подают на вход преобразующего элемента, в котором сигнал о величине углового отклонения маятника преобразуют в линейное перемещение щупа вниз по склону на величину пропорциональную углу поперечного уклона, для смещения агрегата вверх по склону.
| Способ автоматического вождения сельскохозяйственных мобильных агрегатов | 1985 |
|
SU1389699A1 |
| САМОНАСТРАИВАЮЩЕЕСЯ УСТРОЙСТВО АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ ДВИЖЕНИЯ ТРАКТОРА | 0 |
|
SU334935A1 |
| Гидроследящяя система для автоматического вождения колесной машины по контрастному следу | 1974 |
|
SU498924A1 |
| Самонастраивающееся устройство автоматического направления движения транспортного средства | 1983 |
|
SU1162378A1 |
| DE 3529460 A1, 26.02.1987. | |||

