(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО
НАПРАВЛЕНИЯ ДВИЖЕНИЯ ТРАКТОРНОГО АГРЕГАТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Копирующее устройство агрегата для работы в междурядьях растений | 1983 |
|
SU1142020A1 |
| Устройство для автоматического направления движения самоходной сельскохозяйственной машины | 1980 |
|
SU948308A1 |
| Устройство для автоматического направления движения колесного трактора по рядкам растений | 1978 |
|
SU704499A1 |
| Способ управления курсом сельхозагрегата по рядкам растений | 1990 |
|
SU1759260A1 |
| Сельскохозяйственный агрегат | 1982 |
|
SU1085536A1 |
| УСТРОЙСТВО КОРРЕКЦИИ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА ПОПЕРЕК СКЛОНА | 2001 |
|
RU2195097C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА | 2000 |
|
RU2181232C1 |
| ТРАЕКТОГРАФ | 1973 |
|
SU366987A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| Устройство для автоматического направления движения тракторного агрегата в междурядьях многолетних насаждений | 1981 |
|
SU965377A1 |
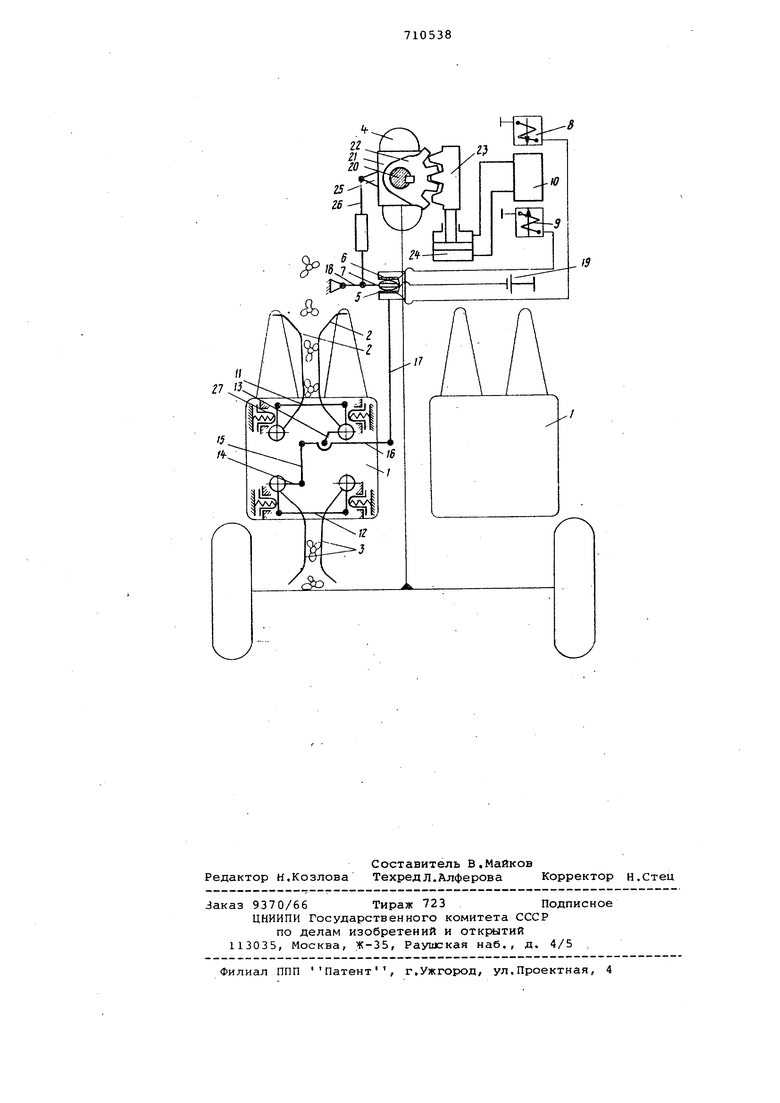
Изобретение относится к ус тройствам автоматизации управления сельскохозяйственными агрегатами и может быть использовано-яля автоматического направления движения тракторного агрегата. Известно устройство для автоматического направления Движения трактор ного агрегата, включающее трехпозиционнБгй электроконтактный чувствител ный элемент и электромеханический ис полнительный механизм fl. Копирующий щуп выпол.нен в виде двух соединенных между собой изогнутых упругих прутков, поворачивающихся вокруг оси и обхватывающих стебли растений около корней. При поступательном движении машины он участвует в силовом взсшмодействии с растениями и вырабатывает сигнал в виде перемещения,т,е., поворот вокруг шар нира подвески передается на электроконтактный чувствительный элемент и электромеханический исполнительнвй механизм. Известно также устройство для автоматического направления движения тракторного.агрегата по рядкам растений, включающее уборочные аппараты с подпружиненными копирующими щупами, соединенные с последними и с направляющими колесами, электроконтактный датчик и электрогидравлический механизм 2. Однако в известных устройствах для автоматического направления движения тракторного агрегата копирующие щупы устанавливают за .габаритами машины, что снижает ее маневренность, надежность и точность автоматического направления движения при получении управляющего сигнала от углового и поступательного смещения тракторного агрегата относительно растений. Цель изобретения - повышение точности автоматического направления движения по рядкам растений. Это достигается тем, что копирующие щупы установлены спереди и сзади уборочного аппарата и связаны между собой дифференциальным рычагом, один конец которого соединен с электроконтактным датчиком, на чертеже показана схема предлагаемого устройства для автоматического направления движения тракторного агрегата по рядкам растений. Устройство включает уборочные аппараты 1 с подпружиненными копиру нвдими щупами 2 и 3, соединенные с последними и направляющими колесами 4, электроконтактный датчик с контактами 5, 6 и 7. и электрогидравлический механизм, состоящий из электро магнитов 8 и 9, управляющих гидрораспределителем 10. Копирующие щупы 2 и 3 установлены спереди и сзади уборочных аппаратов 1. Для обеспечеНИН постоянной ширины щели между щупами 2 и 3 они связаны тягами 11 и 12 Сигнал - поворот от передних 2 и задних 3 щупов передается через систему рычагов 13 и 14 и тяги 15 на дифференциальный рычаг 16, который перемещает тягу 17 с установленными на нем контактами 5 и 6. Контакты 5 и б замыкаются с контактом 7, установленным на рычаге 18 обратной связи. Контакт 7 соединен с источником -питания 19, а контакты 5 и б соответственно с электромагнитами 8 и 9. На валу 20 направляющего колеса 4, установленного в вилке 21, закреплен зубчатый сектор 22, взаимодействугаций с зубчатой рейкой 23. Зубчатая рейка приводится в. движение гидроцилиндром 24 управляемым гидрораспределителем 10. На вилке 21 закреплен рычаг 25, который с помощью тяги 26 соединен с ры чагом 18 обратной связи. Щупы 2 и 3 удерживаются в нейтральном положении пружинным механизмом 27. Устройство для автоматического на правления движения тракторного агрегата работает следующим образом. При смещении рядков растений, например, вправо параллельно направлению движения такторного агрегата механические щупы 2 и 3, установленные на уборочном аппарате 1 и участвующи в силовом взаимодействии с растениям вырабатывают сигнал рассогласования поворот. При этом щуп 2 поворачивает ся по часовой стрелке, а щуп 3 - про тив. Поворот щупа 2 передается на ры чаг 13. Рычаг 13 с закрепленным на нем шарнирно дифференциальным рЕлчаго 16 движется вперед по ходу машины. П ворот щупа 3 передается на рычаг 14, который отодвигает т.ягу 15 с закрепленным на нем концом дифференциально го рычага 16 вперед по ходу машины. Таким образом дифференциальный рычаг 16 движется вперед, перемещая тягу 1 и замыкая контакты 5 и 6, Последние замыкают цець электромагнита В.Гидро рас1 ределитель 10 направляет рабочую жидкость в щтоковую полость гидроцилиндра 24, который, перемещая зубчатую рейку 23, поворачивает зубчатый сектор 22, закрепленный на валу 20 направляющего колеса 4, тем самым поворачивая направляющее колесо 4 по часовой стрелке. Поворачиваясь вместе с вилкой 21 направляющего колеса рычаг 25 перемещает тягу 26 и рычаг 18 обратной связи так, что контакт отходит вперед по ходу машины, уменьшая сигнал рассогласования. Поворот машины происходит до тех пор, пока уборочный аппарат не отойдет от рядка растений. При смещении рядков растений, например, влево относительно направления движения тракторного агрегата механические щупы 2 и 3 имеют одно направление поворота - против часовой стрелки. При повороте щупа 2 против часовой стрелки рычаг 13 с шарнирно-заКрепленным на нем дифференциальным рычагом 16 движется назад по ходу машины. Поворот щупа 3 против часовой стрелки передается на рычаг 14, который толкает тягу 15 с закрепленным на нем конусом дифференциального рычага 16 вперед- .по ходу машины. Дифференциальный рычаг 16 поворачивается вокруг шарнира закрепления рычага 13 и отводит тягу 17 назад, Контакты 6 и 7 замыкаются, включая электромагнит 9.Гидрораспределитель 10 направляет рабочую жидкость в бесштоковую полость гидроцилиндра 24, поворачивая колесо 4 против часовой стрелки. Поворот происходит до тех пор, пока уборочный аппарат 1 не сместится от рядка растений. При смещении только одного щупа 2 (начало ухода машины от рядков), например, против часовой стрелки рычаг 13 поворачивает дифференциальный рычаг 16 по часовой стрелке вокруг шарн7г1ра тяги 12, так как щупы 2 и 3 удерживаются в нейтральном положении пружинным механизмом 27. Происходит замыкание контактов 6 и 7, что приводит к повороту колеса . 4 против часовой стрелки. Формула изобретения Устройство для автоматического направления движения тракторного агрегата, включающее уборочные аппараты с подпружиненными копирующими щупами, соединенные с последними и с направляквдими колесами, электроконтактный датчик и электрогидравлический механизм, отличающееся тем, что, с целью повышения точности автоматического направления движения по рядкам растений, копирующие щупы установлены спереди и сзади уборочного аппарата и связаны между собой дифференциальным рычагом, один конец которого соединен с электроконтактным датчиком. Источники информации, принятые во внимание при экспертизе 1.Автоматизация вождения тракторов , М., изд- во НАТИ, 1961, выпуск 101. 2.Авторское свидетельство СССР № 261791, кл. А 01 В 69/04, 1964 (прототип).
