Изобретение относится к гироскопическим приборам, а именно, к гироскопическим гироскопам и может найти применение в качестве датчика углового отклонения систем слежения и управления.
Подобные гироскопы обычно содержат корпус, вращающийся ротор со сферической полостью, частично заполненной жидкостью, размещенный в полости твердый сферический поплавок.
Основным требованием, предъявляемым к такому гироскопу является обеспечение точности его работы в условиях осевых и боковых перегрузок при изменении температуры окружающей среды в диапазоне от 50 до -50oC.
Известен гидродинамический гироскоп (см. К.П. Андрейченко "Динамика поплавковых гироскопов и акселерометров", М.: "Машиностроение", 1987). Этот гироскоп обладает повышенной точностью, стойкостью к перегрузкам, ударам и вибрации благодаря тому, что при поступательных и угловых переносных движениях основания инерционная силовая нагрузка со стороны поплавкового чувствительного элемента практически полностью воспринимается и гасится поддерживающим слоем жидкости.
Недостатком указанного гироскопа является наличие уводящих моментов, являющихся следствием несферичности полости ротора и поплавка, возникающих, например, при изготовлении вследствие технологических факторов.
Уводящие моменты вызывают ложное отклонение оси вращения поплавка. Например, при действии на гироскоп измеряемого входного воздействия ωвх поплавок отклонится не только на угол α в плоскости, перпендикулярной вектору измеряемого входного воздействия, который в данном случае является полезной информацией, но и на угол β в плоскости вектора измеряемого входного воздействия, который вносит погрешность измерения, приводя к возникновению в гидродинамическом гироскопе перекрестной связи. Коэффициент перекрестной связи Kпр= β/α. .
Наличие перекрестной связи значительно снижает коэффициент передачи и постоянную времени гироскопа, а также вносит погрешность при определении положения измеряемого входного воздействия относительно опорной системы координат объекта, что снижает точностные характеристики гироскопа и, следовательно, точностные характеристики системы слежения или управления.
Другим недостатком известного гидродинамического гироскопа является нарушение условия равенства нулю разности массы поплавка и массы вытесненной им жидкости, т.е. условия нулевой плавучести, необходимого для обеспечения точности гироскопа при воздействии на него перегрузок в рабочем диапазоне температур. При этом отношение (Mп-Мвж)/Мп х 100% может достигать значения до ± (25-30)%, где Мп - масса поплавка; Мвж - масса вытесненной поплавком жидкости.
Таким образом задачей данного технического решения является разработка гидродинамического гироскопа, обеспечивающего высокую точность в условиях осевых и боковых перегрузок.
Общими признаками с предлагаемым авторами гироскопом являются: корпус, ротор со сферической полостью, частично заполненной жидкостью, вращающийся от внешнего элекродвигателя, помещенный в сферическую полость поплавок.
Оптимальной конструкцией гидродинамического гироскопа, удовлетворяющей требованиям по точности, явилась бы конструкция с компенсацией перекрестной связи, стабилизацией нулевой плавучести поплавка и оптимальным зазором между поплавком и поверхностью сферической полости.
Наиболее близким по сути и достигаемому техническому эффекту является гидродинамический гироскоп (см. К.П.Андрейченко "Динамика поплавковых гироскопов и акселерометров", М.: "Машиностроение", 1987), принятый авторами за прототип. Гироскоп включает корпус, ротор со сферической полостью, частично заполненной жидкостью, вращающийся от внешнего электродвигателя, помещенный в сферическую полость поплавок.
При вращении ротора поплавок увлекается во вращательное движение, всплывает на ось вращения поддерживающего слоя жидкости и центрируется в радиальном направлении относительно сферической полости.
Вследствие поворота корпуса гироскопа с угловой скоростью ωвх вокруг любой оси, перпендикулярной оси собственного вращения ротора, ось вращения поплавка остается от оси вращения сферической полости на некоторый угол θ , который характеризует величину входной угловой скорости.
Таким образом, задачей данного технического решения (прототипа) являлась разработка гироскопа высокой точности, перегрузочной способности, ударной и вибрационной стойкости.
Однако, поставленная задача до конца не была решена из-за наличия большого коэффициента перекрестной связи Кпс и невозможности обеспечения нулевой плавучести поплавка, связанным с технологическими погрешностями изготовления и температурным воздействием.
Уводящие моменты, от которых зависит Кпс, возникают в результате отклонения формы поплавка и сферической полости ротора от правильной сферы.
Для сферической полости отклонения заключаются в различии радиусов сферических поверхностей в пределах поля допуска на изготовление, биение сферических поверхностей деталей, образующих сферическую полость относительно оси вращения полости.
Для поплавка это отклонение выражается в изменении радиуса сферы в различных точках поверхности из-за технологических погрешностей при изготовлении. Кроме того, так как для обеспечения требований нулевой плавучести поплавок, как правило, изготавливают полым, состоящим из двух полусфер, полусферы при изменении температуры ведут себя как самостоятельные тела и каждая из них деформируется по своему, дополнительно искажая форму поплавка.
Изменение температуры и ускоренное движение основания вызывают изменение радиуса свободной поверхности жидкости Rсп (фиг. 1), что свою очередь нарушает условие Δm = Mп-Mвж= 0 . И это приводит к ошибке в измерении угла рассогласования между осями вращения поплавка и сферической полости ротора при одинаковой скорости углового перемещения корпуса гироскопа, т.е. к снижению точности.
Для повышения точности гидродинамического гироскопа необходимо увеличивать коэффициент передачи. Это возможно за счет снижения коэффициента сил вязкого трения, который уменьшается с увеличением зазора δ между поплавком и сферической полостью и снижения динамической вязкости жидкости. Однако увеличение зазора и снижение динамической вязкости жидкости в условиях воздействия на гироскоп боковых перегрузок может привести к возникновению незатухающих радиальных колебаний поплавка и, как следствие, к потере им устойчивости.
Анализ устойчивости движения поплавка показал, что затухание колебаний можно характеризовать величиной
Однако при значениях температуры окружающей среды ±50oC этого условия оказывается недостаточно и, в результате, на величину зазора δ накладывается дополнительное ограничение и его величина определяется из выражения:
где
ν - кинематическая вязкость жидкости.
Если величину кинематической вязкости ν задать в сантистоксах, то δ имеет размерность сантиметры.
Общими признаками прототипа с предлагаемым авторами гидродинамическим гироскопом является наличие корпуса, ротора со сферической полостью, частично заполненной жидкостью и вращающегося от внешнего электродвигателя, помещенный в сферическую полость поплавок.
В отличие от прототипа, в предлагаемом авторами гидродинамическом гироскопе поплавок, собранный из двух полусфер, дополнительно снабжен кольцевой вставкой, установленной с плотным контактом с сопрягаемыми поверхностями поплавка, симметрично относительно его центра, ротор выполнен из двух жестко соединенных между собой через регулируемые элементы чашек, центры сфер которых смещены из центра ротора на величину L≤0,004 x Rk, чашки снабжены вкладышами с образованием цилиндрических полостей, выполненных симметрично оси подвеса, торцевые поверхности вкладышей со стороны сферической полости изготовлены по сфере с радиусом, равным радиусу сферической полости, а сферическая полость сообщена с цилиндрическими полостями посредством выполненных во вкладышах сквозных переходных каналов, при этом высота цилиндрической полости Hп определяется по формуле:
а радиальный зазор δ между поверхностью сферической полости ротора и поплавком определяется из условия:
где
Rz, Rп, Rk -радиусы основания цилиндрической полости, поплавка и сферической полости соответственно;
ν - кинематическая вязкость жидкости.
Именно это позволяет сделать вывод о наличии причинно - следственной связи между совокупностью существенных признаков предложенного технического решения и достигаемым техническим результатом.
Указанные признаки, отличительные от прототипа, и на которые распространяется испрашиваемый объем правовой охраны, во всех случаях достаточны.
Задачей предполагаемого изобретения является повышение точности гироскопа в условиях осевых и боковых перегрузок при изменении температуры окружающей среды в диапазоне от -50oC до +50oC
Новое конструктивное выполнение гироскопа позволяет увеличить его точность за счет уменьшения коэффициента перекрестной связи, стабилизации нулевой плавучести поплавка, оптимального выбора зазора между поплавком и поверхностью сферической полости ротора.
Сущность изобретения состоит в том, гидродинамический гироскоп, содержащий корпус, ротор со сферической полостью, частично заполненной жидкостью, вращающийся от внешнего электродвигателя относительно корпуса, помещенный в сферическую полость поплавок, собранный из двух полусфер, в отличие от прототипа и согласно изобретению дополнительно снабжен кольцевой вставкой, установленной с плотным контактом с сопрягаемыми поверхностями поплавка симметрично относительно его центра, ротор со сферической полостью выполнен из двух жестко соединенных между собой через регулируемые элементы чашек, центры сфер которых смещены от центра ротора на величину L ≤0,004 x Rk, чашки снабжены вкладышами с образованием цилиндрических полостей, выполненных симметрично оси подвеса, торцевые поверхности вкладышей со стороны сферической полости изготовлены по сфере с радиусом, равным радиусу сферической полости, а сферическая полость сообщена с цилиндрическими полостями посредством выполненных во вкладышах сквозных переходных каналов, при этом высота цилиндрических полостей Hп определяется по формуле:
а радиальный зазор δ между поверхностью сферической полости ротора и поплавком определяется из условия
где
Rz, Rп, Rk -радиусы основания цилиндрической полости, поплавка и сферической полости соответственно;
ν - кинематическая вязкость жидкости.
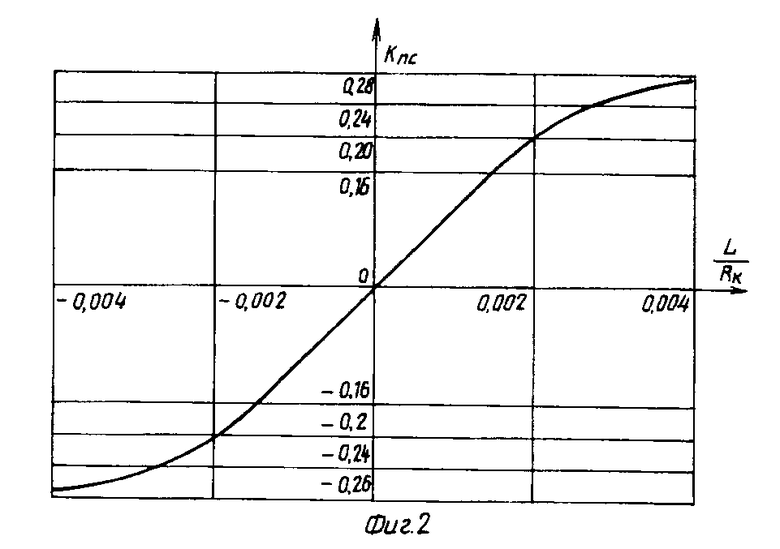
На фиг. 1 изображен поперечный разрез гидродинамического гироскопа; на фиг. 2 - зависимость величины компенсируемого коэффициента перекрестной связи от отношения L/Rk; на фиг. 3 - кривые изменения плавучести поплавка Δm от отношения радиуса основания цилиндрических полостей к радиусу сферической полости.
Гироскоп содержит корпус 1, вращающийся с угловой скоростью Ω ротор со сферической полостью 2, состоящий из двух жестко соединенных между собой чашек 3, 4. Чашки снабжены вкладышами 7, 8, образующими цилиндрические полости 5,6. Сферическая полость 2 и цилиндрические полости 5,6 сообщаются между собой посредством сквозных переходных каналов 11,12,13,14, выполненных во вкладышах 7, 8 и частично заполнены жидкостью 9. В полости 2 размещен сферический поплавок 10 собранный из двух полусфер 16, 17 и дополнительно снабженный кольцевой вставкой 18, установленной с плотным контактом с сопрягаемыми поверхностями поплавка (полусферами 16, 17). Между чашками 3, 4 установлен регулируемый элемент 15, с помощью которого можно при сборке ротора обеспечивать необходимое смещение центров чашек от центра ротора на величину L. Регулируемый элемент 15 может быть, например, выполнен в виде кольца, высота которого подбирается при сборке ротора в соответствии с требуемой величиной L.
Гироскоп работает следующим образом. При вращении камеры 2 с угловой скоростью Ω поплавок 10 за счет гидродинамического давления со стороны жидкости 9, увлекаемой во вращение внутренней поверхностью чашек 3 и 4, размещается в центре полости 2 и за счет сил вязкого трения приводится во вращение с угловой скоростью Ω . Оси вращения поплавка 10 ОХп и полости 2 ОХk совпадают. При угловом перемещении гироскопа, например, в плоскости OXY с угловой скоростью ωвх на поплавок 10 действует гироскопический момент Мг1= H•ωвх , где H - кинетический момент поплавка. Поплавок 10 стремится сохранить свое положение в пространстве и между осями вращения полости 2 и поплавка 10 появляется угол рассогласования β . При этом на поплавок 10 начинает действовать момент сил вязкого трения Mвт= Kтр•Ωβ•β , где Ктр - коэффициент сил вязкого трения поплавка о жидкость. Мвт уравновешивает гироскопический момент Мг1. При равенстве Мг1 = Мвт величина угла β принимает установившееся значение, ось поплавка 10 занимает положение ОХп.
Если поплавок 10 и полость 2 в результате изготовления, сборки и при изменении температуры имеют правильную сферическую форму, отклонение оси вращения поплавка в плоскости OXZ равно нулю, т.е. и перекрестная связь в гироскопе отсутствует.
В случае несферичности поплавка 10 и полости 2 ротора при отклонении поплавка 10 на угол α в плоскости OXZ на поплавок 10 действует уводящий момент Мув, вектор которого направлен по оси OZ и, в зависимости от вида несферичности, может совпадать по направлению с осью OZ или иметь противоположное направление. Возникновение Мув приводит к прецессии оси поплавка в плоскости OXZ до уравновешивания момента Мув моментом сил вязкого трения Мвт. Вследствие чего между осями вращения поплавка 10 и полости 2 в плоскости OXZ устанавливается угол ± β (знак определяется в зависимости от направления вектора уводящего момента), т. е. ось вращения поплавка 10 займет положение ОХп1. Перекрестная связь при этом имеет величину
Кольцевая вставка 18 позволяет обеспечить стабильность формы поплавка 10 за счет равномерной деформации его во всех направлениях при изменениях температуры.
Изменяя взаимное положение чашек 3, 4 ротора, т.е. "растягивая" или "сжимая" полость 2 в соответствии с графиком (фиг. 2) изменяется величина и направление компенсирующего момента, действующего на поплавок 10 со стороны сферической полости 2 в пределах ± Мкомп, что приводит к уменьшению коэффициента перекрестной связи и повышению точности гироскопа.
Для обеспечения условия нулевой плавучести поплавка 10 заливается расчетное количество жидкости 9, однако при изменении температуры объем жидкости меняется и условие Δm = 0 нарушается.
Введение цилиндрических полостей 5, 6 позволяет за счет перераспределения жидкости между сферической полостью 2 и цилиндрическими полостями 5, 6 стабилизировать радиус свободной поверхности жидкости и обеспечить равенство Мп=Мвж.
Из графика (фиг. 3) следует, что при Rz/Rk =0,76 - 0,8 относительное изменение плавучести Δm/Мп в диапазоне температур ± 50oC не превышает ± 0,5% и увеличивается за границами этого диапазона.
При уменьшении температуры, например, до - 50oC объем жидкости 9 в зазоре между поплавком 10 и сферической полостью 2 уменьшается на величину ΔV , что вызывает увеличение радиуса свободной поверхности жидкости. Это уменьшение компенсируется за счет перетекания некоторого количества жидкости 9 из цилиндрических полостей 5, 6 через переходные каналы 11, 12, 13, 14, что приводит к изменению объема V только на величину ΔV1 и увеличивает радиус свободной поверхности жидкости, приближая его значение к значению при температуре заливки.
При температуре + 50oC происходит перетекание жидкости из сферической полости 2 в цилиндрические полости 5, 6, т.о. регулируется объем вытесненной поплавком жидкости 9.
По предлагаемому изобретению разработана конструкторская документация, по которой изготовлена опытная партия гироскопов.
Испытания подтвердили стабильные точностные характеристики гироскопов в рабочем диапазоне температур и при действии продольных и поперечных перегрузок.
Гироскоп прост в изготовлении и не требует дефицитных материалов.
По результатам испытаний предлагаемая конструкция гидродинамического гироскопа рекомендована к серийному производству.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2002 |
|
RU2230293C1 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2310163C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ОТКЛОНЕНИЯ ЗАДАННОГО НАПРАВЛЕНИЯ ОТ ВЕРТИКАЛИ И ПОПЕРЕЧНЫХ УСКОРЕНИЙ ПОСРЕДСТВОМ ГИДРОДИНАМИЧЕСКИХ ГИРОСКОПОВ, СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА С АКСИАЛЬНЫМ СМЕЩЕНИЕМ ЦЕНТРА МАСС И СПОСОБ ОПРЕДЕЛЕНИЯ ЕГО ПЛАВУЧЕСТИ | 2004 |
|
RU2269097C1 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2009 |
|
RU2410645C1 |
| СПОСОБ КОНТРОЛЯ ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА И СПОСОБ ОПРЕДЕЛЕНИЯ ОДНОСТОРОННИХ ОСЕВЫХ ЗАЗОРОВ В ГИДРОДИНАМИЧЕСКОМ ГИРОСКОПЕ | 2004 |
|
RU2266522C1 |
| ГИДРОДИНАМИЧЕСКИЙ ГИРОСКОП | 2009 |
|
RU2433375C2 |
| СПОСОБ НАСТРОЙКИ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА, СПОСОБ НАСТРОЙКИ ЦЕНТРИРУЮЩЕЙ ЧАСТИ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА, СПОСОБ ОПРЕДЕЛЕНИЯ ПЛАВУЧЕСТИ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА, СПОСОБ КОРРЕКТИРОВКИ КОЛИЧЕСТВА ЖИДКОСТИ В ПОДВЕСЕ ПОПЛАВКА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА И УСТРОЙСТВО НАСТРОЙКИ ЦЕНТРИРУЮЩЕЙ ЧАСТИ ПОДВЕСА (ВАРИАНТЫ) | 2004 |
|
RU2269096C2 |
| СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА (ВАРИАНТЫ) | 2004 |
|
RU2267746C1 |
| СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИДРОДИНАМИЧЕСКОГО ГИРОСКОПА (ВАРИАНТЫ) | 2004 |
|
RU2270417C1 |
| СПОСОБ ГИДРОДИНАМИЧЕСКОГО ПОДВЕСА РОТОРА ГИРОМОТОРА ПОПЛАВКОВОГО ГИРОСКОПА (ВАРИАНТЫ) И СПОСОБ ЗАПОЛНЕНИЯ ЦИЛИНДРИЧЕСКОГО ГИДРОДИНАМИЧЕСКОГО ПОДВЕСА РОТОРА ГИРОМОТОРА ПОПЛАВКОВОГО ГИРОСКОПА НЕСМЕШИВАЮЩИМИСЯ ЖИДКОСТЯМИ | 2004 |
|
RU2272252C1 |

Гироскоп предназначен для использования в качестве датчика углового отклонения систем слежения и управления. Ротор вращается относительно корпуса. Сферическая полость ротора частично заполнена жидкостью. Поплавок собран из 2-х полусфер и помещен в полость ротора. Поплавок снабжен кольцевой вставкой, установленной симметрично относительно его центра. Ротор выполнен из двух жестко соединенных чашек. Центры сфер чашек смещены от центра ротора. Чашки снабжены вкладышами с образованием цилиндрических полостей, симметричных оси подвеса. Сферическая полость сообщена с цилиндрическими полостями посредством выполненных во вкладышах сквозных каналов. Такая конструкция гироскопа обеспечивает повышение точности в условиях осевых и боковых перегрузок. 3 ил.
Гидродинамический гироскоп, содержащий корпус, ротор со сферической полостью, частично заполненной жидкостью, вращающийся от внешнего электродвигателя относительно корпуса, помещенный в сферическую полость ротора поплавок, отличающийся тем, что поплавок, собранный из двух полусфер, дополнительно снабжен кольцевой вставкой, установленной с плотным контактом с сопрягаемыми поверхностями поплавка симметрично относительно его центра, ротор выполнен из двух жестко соединенных между собой через регулируемые элементы чашек, центры сфер которых смещены от центра ротора на величину L ≤ 0,004 • Rk, чашки снабжены вкладышами с образованием цилиндрических полостей, выполненных симметрично оси подвеса, торцевые поверхности вкладышей со стороны сферической полости изготовлены по сфере радиусом, равным радиусу сферической полости, а сферическая полость сообщена с цилиндрическими полостями посредством выполненных по вкладышах сквозных переходных каналов, при этом высота цилиндрической полости Hп определяется по формуле

а радиальный зазор δ между сферической поверхностью ротора и поплавком определяется из условия
где Rz, Rп, Rk - радиусы основания цилиндрической полости, поплавка и сферической полости соответственно;
ν - кинематическая вязкость жидкости.
| Андрейченко К.П | |||
| Динамика поплавковых гироскопов и акселерометров | |||
| - М.: Машиностроение, 1987, с | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Распопов В.Я | |||
| Теория гироскопов с бескарда новыми подвесками | |||
| Способ приготовления консистентных мазей | 1919 |
|
SU1990A1 |
| Многоканальная система регулирования | 1982 |
|
SU1083157A1 |
| Аппарат для электрической передачи изображений без проводов | 1920 |
|
SU144A1 |
| МАГНИТОГИДРОДИНАМИЧЕСКИЙ СПОСОБ ПРЕОБРАЗОВАНИЯ ТЕПЛОВОЙ ЭНЕРГИИ В ЭЛЕКТРИЧЕСКУЮ ЗАМКНУТОГО ЦИКЛА | 2002 |
|
RU2226737C2 |

