Изобретение относится к области быстродействующих устройств для отвода площадок обслуживания (ПО) и иных устройств наземного оборудования от бортов ракет-носителей (РН), установленных на своих пусковых устройствах (ПУ), перед пуском РН.
ПО для РН размещаются на агрегатах обслуживания (АО) или на заправочно-дренажных мачтах (ЗДМ).
Кроме ПО некоторые АО оснащены устройствами для удержания РН, установленных на ПУ, от опрокидывания под действием ветровой нагрузки. К таким устройствам относятся ветровые захваты (ВЗ) и опорные стрелы (ОС). ВЗ, как правило, охватывают своими силовыми элементами корпуса РН по периметру, а ОС удерживают РН от опрокидывания в любом азимутальном направлении, будучи присоединенными (быстроразъемно) к корпусу РН в одной точке. Причем для некоторых РН, например, для РН “Ангара”, ОС должна удерживать РН и на начальном участке ее полета: приблизительно до высоты 200 мм над уровнем ПУ.
Предлагаемый грузовой привод с переменной силой тяги предназначается для быстрого отвода ОС от уже летящей по начальному участку своей траектории РН “Ангара”.
Для быстрого отвода ПО и подобных им устройств от бортов РН используются, как правило, устройства в виде гидропневмоприводов, поворачивающих рычаги (стрелы), на которых закреплены ПО, и тем самым отводящим ПО от бортов РН. Однако надежность этих устройств ограничивается надежностью многочисленных гидравлических, электрических и пневматических устройств, входящих в их системы управления. С целью увеличения общей надежности указанных выше приводов элементы, входящие в системы управления приводами, дублируются, а иногда устраиваются, что существенно усложняет эти системы.
Предлагаемый грузовой привод с переменной силой тяги направлен на увеличение надежности привода для отвода ОС, без усложнения системы его управления, до величины, равной 1, т.к. в случае отказа привода отвода ОС неминуема авария РН по вине наземного оборудования, что недопустимо. Такая высокая надежность предлагаемого привода обеспечивается тем, что в нем в качестве силы, отводящей ОС, используется сила земной гравитации (вес груза), а конструкция привода включает в себя только простые механические узлы и детали (рычаги, тяги, валы, оси и т.п.) с надежностью, равной 1.
Известны очень надежные грузовые приводы, использующие силу земной гравитации, например, в спортивных тренажерах, в которых груз (или грузы) обеспечивают возврат элементов тренажеров (рычагов, рукояток, перекладин) в исходное положение после прекращения действия на них сил рук или ног спортсмена.
Известны также и грузовые приводы промышленного назначения. Известен, например, грузовой привод токоподвода к самоходному механизму с ограниченной длиной передвижения по патенту РФ №2098341 от 10.12.97 г. “Токоподвод к самоходному механизму с ограниченной длиной передвижения”.
Известен также и грузовой привод с переменной силой тяги по патенту РФ №2182104 от 15.12.2000 г. “Грузовой привод с переменной силой тяги для отвода площадки обслуживания от борта ракеты-носителя”. Этот привод содержит вертикально подвижный в направляющих груз, выполненный в виде группы цепей, тяговый трос, присоединенный одним концом через полиспаст обратного действия к грузу, а другим, через лебедку - к площадке обслуживания, и поворотный в вертикальной плоскости самораскрывающийся стопор, размещенный вне площадки обслуживания на ее неподвижном основании, и фиксирующий площадку обслуживания у борта ракеты-носителя через тягу, сочлененную с ним и площадкой обслуживания.
Описанный грузовой привод с переменной силой тяги по патенту РФ №2182104 функционально подходит для отвода ОС, т.к. создает переменное усилие в тяговом тросе: большое в начале отвода - для преодоления силы инерции неподвижной ОС и малое в конце отвода - для снижения силы инерции разогнанной ОС и уменьшения нагрузки на ее тормозное устройство. Этот привод является также ближайшим аналогом (прототипом) предлагаемого грузового привода с переменной силой тяги для отвода ОС от уже летящей РН “Ангара”, т.к. совпадает с ним по наибольшему количеству признаков.
Однако использование описанного грузового привода по патенту РФ №2182104 для отвода ОС от борта РН “Ангара” при ее движении, т.е. при полете на начальном участке траектории невозможно, т.к. самораскрывающийся стопор, размещенный вне площадки обслуживания на ее неподвижном основании, жестко удерживает ПО на определенной высоте над уровнем ПУ и не позволяет поэтому ПО “следить” за движением РН вверх, т.е. перемещаться вместе с ней. Таким образом, размещение самораскрывающегося стопора на неподвижном основании ниже ПО по патенту РФ №2182104 является недостатком этого патента при использовании его для отвода ОС от борта уже летящей РН “Ангара”.
Техническим результатом заявленного изобретения является возможность отвода устройства с самораскрывающимся стопором при движении ракеты на его начальном этапе, что повышает удобство его использования.
Указанный технический результат достигается тем, что в устройстве для отвода вертикально поворотной опорной стрелы от борта ракеты-носителя, содержащем вертикально подвижный в направляющих груз, выполненный в виде группы цепей, тяговый трос, присоединенный одним концом через полиспаст обратного действия к грузу, а другим через лебедку - к опорной вертикально поворотной стреле, шарнирно закрепленной на башне обслуживания, и поворотный в вертикальной плоскости самораскрывающийся стопор, фиксирующий горизонтально опорную стрелу у борта ракеты-носителя, самораскрывающийся стопор размещен на внешнем конце опорной стрелы, выполнен самораскрывающимся под действием собственного веса и регулируемым по длине и углу поворота в горизонтальной плоскости, при этом упомянутый стопор имеет опору, разъемно сочлененную с гнездом на борту ракеты-носителя и регулируемую по высоте, устройство снабжено горизонтально подвижной с возможностью ее фиксации и расфиксации задвижкой, предохраняющей стопор от его несанкционированного самораскрытия и соединенной гибким элементом через другой полиспаст обратного действия, снабженный натяжным устройством, с внутренним концом опорной стрелы, размещенным внутри башни обслуживания.
Опора самораскрывающегося стопора выполнена шаровой для размещения в опорном гнезде на борту ракеты-носителя, выполненном с внутренней конусообразной полостью с шарообразным днищем.
Устройство снабжено расположенным в опорном гнезде борта ракеты-носителя попружиненным стержнем-указателем положения шаровой опоры в нем.
На фиг.1 изображен вид сбоку на вертикально поворотную опорную стрелу РН “Ангара” с грузовым приводом с переменной силой тяги для отвода опорной стрелы от РН в процессе ее движения на начальном участке полета.
На фиг.2 изображен вид А (фиг.1).
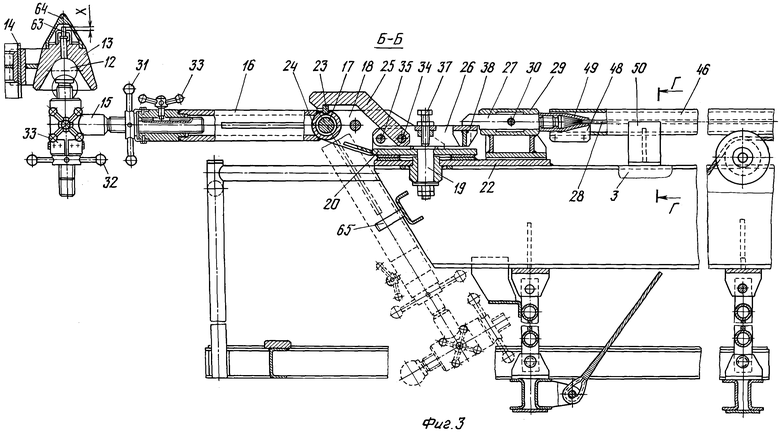
На фиг.3 изображен разрез по Б-Б (фиг.2).
На фиг.4 изображен разрез по Б-Б (фиг.2) в момент раскрытия стопора.
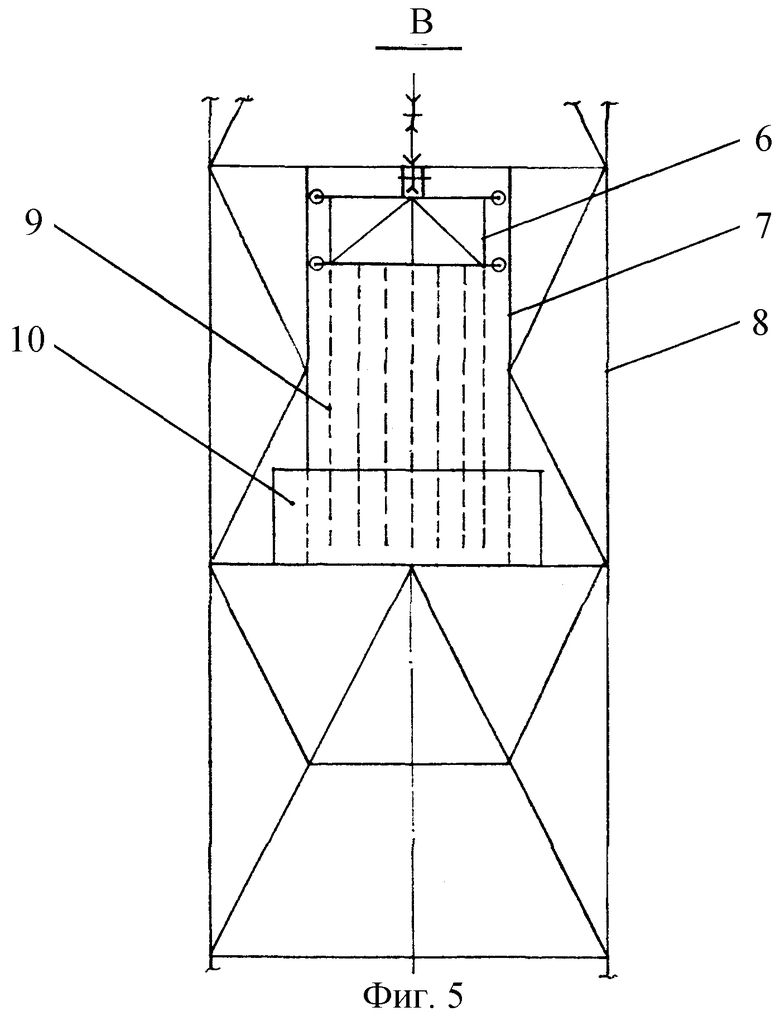
На фиг.5 изображен вид В (фиг.1).
На фиг.6 изображен разрез по Г-Г (фиг.3).
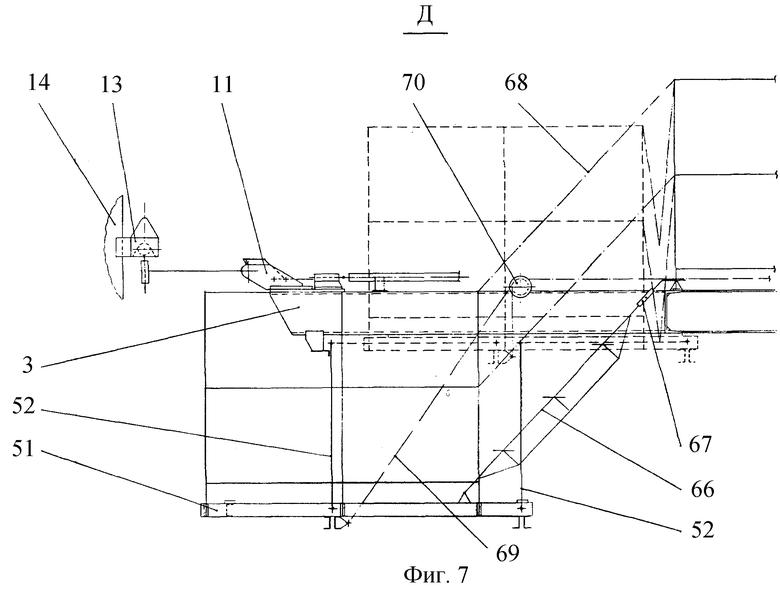
На фиг.7 изображена выноска Д (фиг.1).
Грузовой привод с переменной силой тяги для отвода вертикально поворотной стрелы (ОС) от борта РН в процессе ее движения на начальном участке полета состоит (см. фиг.1) из тягового троса 1, присоединенного одним концом через лебедку 2 к средней части ОС 3, а другим через отклоняющий блок 4 и полиспаст обратного действия 5 - к траверсе 6 (см. фиг.5) подвижной в направляющих 7, закрепленных на АО 8. К траверсе 6 закреплена группа цепей 9, нижние концы которых размещаются в цепном ящике 10, не достигая, однако, его дна. Зазор между полом и концами цепей регулируется лебедкой 2.
На наружном конце ОС 3 закреплен самораскрывающийся собственным весом стопор 11, быстроразъемно сочлененный (см. фиг.2 и 3) своей регулируемой по высоте винтовой шаровой опорой 12 с открытым снизу гнездом 13 на борту РН 14.
Шаровая опора 12 закреплена на регулируемой по длине винтовой штанге 15, размещенной на рычаге 16, снабженном горизонтальной осью 17, с помощью которой рычаг 16 шарнирно присоединен через кронштейны 18 к поворотному на вертикальной оси 19 основанию 20. Поворотное основание 20 для поворота в горизонтальной плоскости оснащено двумя упорными винтами 21 (см. фиг.2), размещенными на неподвижном основании 22, жестко присоединенном к наружному концу ОС 3.
Рычаг 16 и присоединенная к нему штанга 15 с шаровой опорой 12 удерживаются в горизонтальном положении и в зацеплении с гнездом 13 на борту РН 14 с помощью шпонки 23 на корпусе 24 горизонтальной оси 17 и крюка 25, который через стопорный рычаг 26 удерживается от поворота блокирующей, горизонтально подвижной задвижкой 27, сочлененной с вытяжным тросом 28. Блокирующая задвижка 27 размещена в корпусе 29, закрепленном на неподвижном основании 22 с возможностью регулировки по высоте с помощью прокладок и болтов, и снабжена стопорным (предохранительным) штырем 30.
Высота шаровой опоры 12 и длина штанги 15 регулируются гайками 31 и 32, а стопорение шаровой опоры 12 и штанги 15 в нужном положении производится винтами 33.
Крюк 25 присоединен к стопорному рычагу 26 осью 34, а сам стопорный рычаг 26 присоединен осью 35 к кронштейнам 36 (см. фиг.4) на поворотном основании 20 и снабжен регулировочным болтом 37 и опорной поверхностью 38 для сочленения с блокирующей задвижкой 27.
Вытяжной трос 28 присоединен к блокирующей задвижке 27 с целью увеличения его хода (см. фиг.1) через полиспаст обратного действия 39, подвижный блок 40 которого закреплен на кронштейне 41, размещенном на внутреннем (хвостовом) конце 42 ОС 3. Внутренний конец 42 размещен внутри АО 8 и снабжен противовесом 43 для уравновешивания ОС 3 на своей оси поворота 44. Полиспаст обратного действия 39 снабжен натяжным устройством 45. Вытяжной трос 28 размещен (во избежание зацепов) (см. фиг.6) внутри трубы 46 с прорезью 47, в которой перемещается гребень 48 тросовой заделки 49, с помощью которой трос 28 сочленяется с блокирующей задвижкой 27. Труба 46 размещается на верхней поверхности ОС 3 на опорах 50.
Для присоединения стопора 11 своей шаровой опорой 12 к гнезду 13 на борту РН 14 и необходимой для этого регулировки обслуживающим персоналом стопора 11 по высоте, длине и углу поворота ОС 3 оснащена (см. фиг.7) на внешнем своем конце подвесными поворотными площадками 51, присоединенными к ней с помощью поворотных подвесок 52 с двух сторон.
На перекрытии 53 (см. фиг.1) АО 8, расположенном над внутренним концом 42 ОС 3, размещена лебедка 54 с тросом 55.
Ниже внутреннего конца 42 ОС 3 над перекрытием 56 АО 8 размещена тормозная система 57, состоящая из тормозного троса 58, отклоняющих блоков 59, грузов 60 и кулачковых стопоров 61, позволяющих тросу 58 двигаться в рабочем положении только в одном направлении (на подъем грузов). Для перевода троса 58 в рабочее (натянутое) положение при подготовке к отводу ОС 3 кулачки стопоров снабжены ручным механизмом для их раскрытия. Для взаимодействия с тросом 58 тормозной системы 57 кронштейн 41 выполнен с дугообразной выемкой в нижней части. Зона размещения тормозной системы 57 снабжена ограждением 62.
Для объективного контроля за положением шаровой опоры 12 в гнезде 13 служит подпружиненный стержень-указатель 63 (см. фиг.3), выдвижение которого на расчетную величину “х” из гнезда 13 свидетельствует о полном контакте шаровой опоры 12 с шарообразным днищем гнезда 13. Стержень-указатель 63 закрыт съемным обтекателем 64.
Передний конец ОС 3 в дополнение к самораскрывающемуся стопору 11 снабжен лирообразным пружинным захватом 65.
Для прохода с основной части ОС 3 (см. фиг.7) на поворотные подвесные площадки 51 служат съемные переходные трапы 66, являющиеся одновременно стопорными устройствами для поворотных подвесных площадок 51. С этой целью тетивы трапов 66 снабжены винтовыми муфтами 67 для увеличения их длины, а сами трапы ограждены гибкими цепными поручнями 68, сочлененными со стойками жестких ограждений площадок 51 и ОС 3.
Для отвода поворотных подвесных площадок 51 из рабочего положения (нижнего) в нерабочее (верхнее) служит трос 69, сочлененный через отклоняющий блок 70 с лебедкой 71 (см. фиг.1), установленной на хвостовой части 42 ОС 3.
Работает описанный привод для ОС следующим образом.
Для подвода ОС 3 из отведенного (верхнего) положения у передней поверхности АО 8 к РН 14 к кронштейну 41 на нижнем (хвостовом) конце 42 ОС 3 присоединяется трос 55 лебедки 54, после чего с помощью этой лебедки ОС 3 опускается в горизонтальное (рабочее) положение и удерживается в нем нужное время тросом 55.
В этом положении вытяжному тросу 28 натяжным устройством 45 дается дополнительная слабина.
После поворота ОС 3 из вертикального в горизонтальное положение лебедкой 71 травят трос 69 и опускают поворотные площадки 51 на своих подвесках 52 в рабочее положение, после чего устанавливают переходные трапы 66 и с их помощью фиксируют положение площадок 51, раскручивая для этого винтовые муфты 67 на нужную величину. После фиксации площадок 51 в рабочем положении с них производится стыковка шаровой опоры 12 с гнездом на борту РН 14. Для этого обслуживающий персонал, находящийся на площадках 51, вращением гайки 32 вдвигает шаровую опору 12 в ее корпус на штанге 15 рычага 16 на полный ход и откидывает крюк 25 до упора в регулировочный болт 37. После этого персонал поворачивает рычаг 16 в горизонтальное положение и стопорит его в этом положении крюком 25, накинув его на шпонку 23, и блокирующей задвижкой 27, сочленив ее с опорной поверхностью 38 на стопорном рычаге 26 и зафиксировав блокирующую задвижку 27 в этом положении предохранительным штырем 30. Слабину вытяжного троса 28 зафиксированной блокирующей задвижки 27 выбирают натяжным устройством 45. В результате этих операций шаровая опора 12 входит с большим зазором в заходную (коническую) часть гнезда 13 на борту РН 14, после чего, регулируя гайками 31 и 32 положение шаровой опоры 12 в гнезде 13 по высоте и длине, а винтами 21 - по горизонтали, добиваются плотного соединения шаровой опоры 12 с шаровым днищем гнезда 13, на наличие которого указывает выдвинувшийся на расчетную величину “х” конец стержня-указателя 63, а затем винтами 33 фиксируют шаровую опору 12 в этом положении.
По окончании фиксации шаровой опоры 12 в гнезде 13 лебедкой 54 вначале дается слабина тросу 55, а затем, убедившись в надежности блокировки стопора 11 и сочленения его через гнездо 13 с РН 14, отсоединяют трос 55 от кронштейна 41 и наматывают его на барабан лебедки 54.
При освобождении ОС 3 от усилия троса 55 трос 1 через лебедку 2 начинает передавать усилие от полного веса груза (группы цепей 9) через полиспаст 5 на ОС 3, которая в свою очередь передает нагрузку на шаровую опору 12, прижимая ее к шарообразному днищу гнезда 13 на борту РН 14.
Таким образом, ОС 3 оказывается во “взведенном”, т.е. в готовом для слежения за движением РН 14 и отводу от нее состоянии.
Отвод ОС 3 от РН 14 осуществляется и возможен (!) только после извлечения предохранительного штыря 30 из корпуса 29 блокирующей задвижки 27 и последующего подъема площадок 51 тросом 69 с помощью лебедки 71 в нерабочее положение. Подъем площадок 51 в нерабочее положение осуществляется после отсоединения от них трапов 66 и уборки последних на штатные места хранения внутри АО 8.
Сам отвод ОС 3 от РН 14 происходит следующим образом.
При движении РН 14 вверх от работы собственных двигателей ОС 3 под действием усилия троса 1 движется (поднимается), поворачиваясь на оси 44, вместе с РН 14 в сочлененном с ней с помощью шаровой опоры 12 и гнезда 13 положении до заданной величины подъема РН 14 над ПУ.
При подъеме передней части ОС 3 вместе с РН 14 на заданную величину над ПУ хвостовая ее часть 42, поворачиваясь на оси 44, опускается пропорционально своей длине вниз и тросом 28 через подвижный блок 40 полиспаста 39 выводит блокирующую задвижку 27 из сочленения с опорной поверхностью 38 стопорного рычага 26, освобождая таким образом стопорный рычаг 26, который перестает удерживать крюк 25 в неподвижном положении. Вследствие этого крюк 25 шпонкой 23 под действием веса рычага 16 со штангой 15 и шаровой опорой 12 и нагрузки, приходящей через ОС 3 на шаровую опору 12 от усилия троса 1, поворачивается (см. фиг.4) вместе со стопорным рычагом 26 на его оси 35 и на своей оси 34 и выходит из зацепления со шпонкой 23, а шаровая опора 12, поворачиваясь совместно со штангой 15 и рычагом 16 вокруг оси 17 под действием совместного их веса, выходит из зацепления с гнездом 13 на борту РН 14. Отсоединившаяся от гнезда 13 РН 14 шаровая опора 12 вместе со штангой 15 и рычагом 16, двигаясь (поворачиваясь) вокруг оси 17 под действием веса и инерции в конечном положении (см. фиг.3), захватывается (и удерживается) лирообразным пружинным захватом 65, взаимодействующим с рычагом 16. Таким образом, после выведения тросом 28 блокирующей задвижки 27 из сочленения с опорной поверхностью 38 стопорного рычага 26 стопор 11 автоматически, как описано выше, самораскрывается и освобождает ОС 3 от сочленения с РН 14. После этого ОС 3 под действием троса 1 начинает независимое от РН 14 движение (поворот) вокруг оси 44 до своего конечного (вертикального) положения у передней поверхности АО 8. При этом после самораскрытия стопора 11 трос 1 передает на ОС 3 усилие вначале от полного веса группы цепей 9, которые, опускаясь на дно цепного ящика 10 и самопроизвольно складываясь в компактные массы, постепенно уменьшают усилие в тросе 1, что обеспечивает снижение скорости движения (поворота) ОС 3 и снижение силы ее инерции при подходе к вертикальному положению у АО 8 (т.е. в отведенное положение), что в свою очередь облегчит работу тормозной системы 57 ОС 3.
Торможение отводимой тросом 1 ОС 3 происходит следующим образом.
При повороте хвостовой части 42 ОС 3 в положение, близкое к вертикальному, ее кронштейн 41 своей дугообразной выемкой входит в зацепление с тросом 58, натянутом грузами 60 над перекрытием 56 АО 8. Двигаясь за счет инерции дальше, хвостовая часть 42 тянет трос 58, который через отклоняющие блоки 59 поднимает грузы 60, чем достигается гашение инерции движения ОС 3. При этом вытянутый за счет подъема грузов 60 трос 58 удерживается в вытянутом положении кулачковыми стопорами 61, в результате чего грузы 60 не передают через трос 58 нагрузку на хвостовую часть 42 после прекращения ее движения, т.е. трос 58 работает без “отдачи”, как трос аэрофинишера на авианосце.
Таким образом, как это показано выше, размещение самораскрывающегося от собственного веса стопора на внешнем конце опорной стрелы в сочетании с грузовым приводом с переменной силой тяги обеспечивает слежение опорной стрелы за движением РН на начальном участке ее полета и отвод опорной стрелы от РН в процессе этого движения, т.е. решает задачу, содержащуюся в названии изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОВОЙ ПРИВОД С ПЕРЕМЕННОЙ СИЛОЙ ТЯГИ ДЛЯ ОТВОДА ПЛОЩАДКИ ОБСЛУЖИВАНИЯ ОТ БОРТА РАКЕТЫ-НОСИТЕЛЯ | 2000 |
|
RU2182104C2 |
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
| Самоходный грузоподъемный кран | 1986 |
|
SU1370057A1 |
| СИСТЕМА ЭКСПЛУАТАЦИОННОГО ОБСЛУЖИВАНИЯ МОРСКОГО ТЕХНИЧЕСКОГО СРЕДСТВА | 2004 |
|
RU2274580C1 |
| ЯКОРНИЦА | 2024 |
|
RU2828998C1 |
| ТОКОПОДВОД К САМОХОДНОМУ МЕХАНИЗМУ С ОГРАНИЧЕННОЙ ДЛИНОЙ ПЕРЕДВИЖЕНИЯ | 1996 |
|
RU2098341C1 |
| СУДОВОЕ ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 1969 |
|
SU239061A1 |
| Гравитационная шлюпбалка | 1973 |
|
SU537000A2 |
| Передвижной кран с задвигаемой в транспортное положение стрелой | 1973 |
|
SU519386A1 |
| Транспортное средство с самопогрузочным устройством | 1985 |
|
SU1284860A1 |



Изобретение относится к наземным устройствам для отвода площадок обслуживания от борта ракеты-носителя. Согласно изобретению, в устройстве самораскрывающийся стопор размещен на внешнем конце опорной стрелы, выполнен самораскрывающимся под действием собственного веса и регулируемым по длине и углу поворота в горизонтальной плоскости. Упомянутый стопор имеет опору, разъемно сочлененную с гнездом на борту ракеты-носителя и регулируемую по высоте. Устройство снабжено горизонтально подвижной с возможностью ее фиксации и расфиксации задвижкой, предохраняющей стопор от его несанкционированного самораскрытия и соединенной гибким элементом через свой полиспаст обратного действия, снабженный натяжным устройством, с внутренним концом опорной стрелы. Натяжное устройство размещено внутри башни обслуживания. Опора самораскрывающего стопора выполнена шаровой для размещения в опорном гнезде на борту ракеты-носителя, выполненном с внутренней конусообразной полостью с шарообразным днищем. В опорном гнезде борта ракеты-носителя имеется подпружиненный стержень-указатель положения шаровой опоры в нем. Изобретение обеспечивает повышение удобства использования устройства за счет отвода опорной стрелы от борта ракеты-носителя на начальном этапе движения этой ракеты. 2 з.п. ф-лы, 7 ил.

| ГРУЗОВОЙ ПРИВОД С ПЕРЕМЕННОЙ СИЛОЙ ТЯГИ ДЛЯ ОТВОДА ПЛОЩАДКИ ОБСЛУЖИВАНИЯ ОТ БОРТА РАКЕТЫ-НОСИТЕЛЯ | 2000 |
|
RU2182104C2 |
| US 4727959 А, 01.03.1988 | |||
| УНИВЕРСАЛЬНАЯ СИСТЕМА ДЛЯ ПОДГОТОВКИ И ПУСКА РАКЕТ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ РАЗЛИЧНЫХ КЛАССОВ | 2000 |
|
RU2194654C2 |

