Изобретение относится к области воздухоплавания, а именно, к способам создания подъемной силы в летательных аппаратах тяжелее воздуха за счет движения аэродинамических поверхностей и может быть также использовано в мореплавании в качестве движителя.
Известен способ создания подъемной силы, при котором формируют направленный поток текучей среды переменной интенсивности, а в качестве управляющего потоком устройства используют крыльчатку [1].
Недостатком этого способа является сложность осуществления.
Наиболее близким из известных способов создания подъемной силы, например летательного аппарата, является выбранный в качестве прототипа способ создания подъемной силы, заключающийся во вращении лопасти с постоянной угловой скоростью вокруг горизонтальной оси [2].
Недостатками данного способа являются:
а) то, что лопасти совершают вращение в одной плоскости и поэтому вращаются в спутной струе, отчего эффект создания подъемной силы ухудшается;
б) использование микропроцессора для управления углом атаки лопасти. Задачей изобретения является повышение эффективности и надежности. Поставленная цель достигается тем, что в способе создания подъемной силы, например, летательного аппарата заключающемся во вращении лопасти (1) с постоянной угловой скоростью вокруг оси, эту ось дополнительно вращают с такой же угловой скоростью вокруг перпендикулярной к ней горизонтальной оси, таким образом, чтобы положительный угол атаки всегда был направлен навстречу движению, а траектория движения представляла объемную восьмерку (лемнискату).
При использовании такого способа создания подъемной силы, например, летательного аппарата траектория перемещения лопасти такова, что каждый раз в момент создания максимальной подъемной силы лопасть находится в невозмущенном потоке. Скорость перемещения лопасти максимальна в момент создания максимальной подъемной силы (верхнее положение лопасти) и уменьшается в  раза, когда лопасть находится в плоскости XOZ, поэтому в эти моменты сила сопротивления движению уменьшается в
раза, когда лопасть находится в плоскости XOZ, поэтому в эти моменты сила сопротивления движению уменьшается в  раза. Таким образом, предложенный способ кроме того, что прост в изготовлении (отсутствие микропроцессоров) еще и эффективнее почти в 1,5 раза.
раза. Таким образом, предложенный способ кроме того, что прост в изготовлении (отсутствие микропроцессоров) еще и эффективнее почти в 1,5 раза.
Пример осуществления способа. На фиг. 1 представлена схема движения лопасти (1). Лопасть вращается с угловой скоростью ω вокруг оси (относительное движение), которая сама вращается в плоскости YOZ с такой же угловой скоростью вокруг перпендикулярной к ней неподвижной горизонтальной оси, совпадающей с осью OX (переносное движение).
В результате этих вращений лопасть движется по траектории, представляющей объемную восьмерку (лемнискату), и будет находиться постоянно над плоскостью XOZ. В правой части рисунка показаны проекции лемнискаты на координатные плоскости.
Одновременно с вращениями лопасти вокруг двух осей она будет проворачиваться вокруг оси, связывающей центр лопасти с центром вращения так, чтобы положительный угол атаки лопасти был направлен навстречу движению и возникающая аэродинамическая сила R. была направлена от центра вращения к лопасти. При этом результирующая составляющая аэродинамической силы проинтегрированная за один полный оборот вокруг оси OX будет направлена вертикально вверх.
Скорость перемещения лопасти максимальна в верхнем положении лопасти, когда складываются скорости относительного и переносного движений и создаваемая подъемная сила максимальна; при нахождении плоскости вращения лопасти в горизонтальном положении скорость переносного движения становится нулевой, соответственно скорость перемещения лопасти подъемная сила и сила сопротивления уменьшаются в  раз.
раз.
Вычислим величину усредненной подъемной силы, возникающей при движении лопасти:
Y = Rsinβ, где sinβ = sin2α.
Здесь
R - аэродинамическая сила, зависящая от α :
R(α) = cyρv2(α)S/2,
α и β - углы, приведенные на фиг. 1,
cy - коэффициент подъемной силы,
S - площадь несущей поверхности лопасти,
ρ - плотность воздуха,
v(α) - скорость движения лопасти
v2(α) = ω2r2+ω2r2sin2α = ω2r2(1+sin2α)
тогда
Y(α) = cyρω2r2(1+sin2α)Ssin2α/2
Усредним ее за один период обращения лопасти
Ycp= ∫Y(α)dα/2π = 7cyρω2r2S/16
Аналогично подъемной силе рассчитываем силу лобового сопротивления
Q(α) = cxρω2r2(1+sin2α)Ssin2α/2
где
cx - коэффициент лобового сопротивления, а усредненная сила сопротивления будет
Qcp= ∫Q(α)dα/2π = 3cxρω2r2S/4
Сравнение с аналогичными параметрами вертолета показывает, что использование принципа движения лопасти по лемнискате при создании такой же подъемной силы создает силу сопротивления в результате маховых движений примерно на 30 процентов ниже.
Благодаря такому способу создания подъемной силы повышается эффективность и надежность создания подъемной силы, например, летательных аппаратов.
Источники информации:
1. А.с. СССР N 2002671, кл. B 64 C 29/00, 1991 г.
2. Пат. США N 5265827, кл. B 64 C 29/00, 1993 г. (прототип)у
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1999 |
|
RU2159726C1 |
| ЛОПАСТНОЙ ДВИЖИТЕЛЬ | 2001 |
|
RU2184677C1 |
| КРЫЛО ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1999 |
|
RU2157328C1 |
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОГО ПОДЪЕМА И ДВИЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2008 |
|
RU2388653C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| СПОСОБ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ И ЗАВИСАНИЯ САМОЛЕТА В ВОЗДУХЕ | 2016 |
|
RU2656934C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2279374C1 |
| СПОСОБ ПОЛЕТА В ВОЗДУХЕ С ВОЗМОЖНОСТЬЮ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ И РОТОРОПЛАН С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 2009 |
|
RU2414388C1 |
| РОТОРОПЛАН | 2001 |
|
RU2245824C2 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА АЭРОДИНАМИЧЕСКОГО ТИПА | 2005 |
|
RU2278801C1 |
Изобретение относится к воздухоплаванию и касается способа создания подъемной силы для летательных аппаратов, обеспечивающего снижение силы сопротивления. Согласно способу создание подъемной силы для, например, вертолета, обеспечивается вращением лопасти с одинаковой угловой скоростью вокруг горизонтальной оси и перпендикулярной к ней вращающейся оси таким образом, чтобы положительный угол атаки всегда был направлен навстречу движению, а траектория движения представляла объемную восьмерку (лемнискату). 1 ил.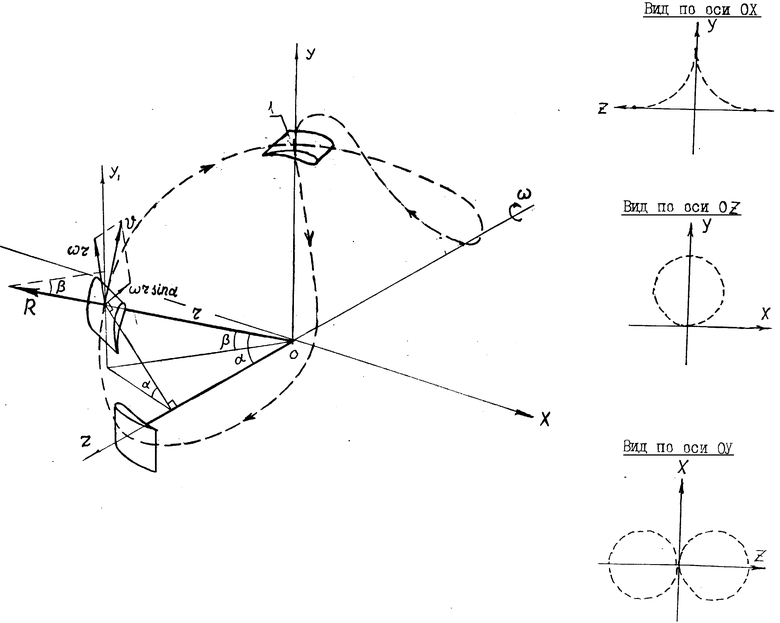
Способ создания подъемной силы преимущественно для летательного аппарата, заключающийся во вращении лопасти в плоскости с постоянной угловой скоростью вокруг оси и обеспечении при вращении лопасти положительного угла атаки лопасти навстречу движению, отличающийся тем, что указанную ось дополнительно вращают с такой же угловой скоростью вокруг перпендикулярной к ней неподвижной горизонтальной оси, расположенной в указанной плоскости, для обеспечения вращения лопасти по траектории лемнискаты.
| US, A, 5265827, 1991 | |||
| SU, A, 2002671, 1991. |

