Настоящее изобретение относится к летающим устройствам, объемная плотность которых больше, чем плотность воздуха.
Задачей, на решение которой направлено заявляемое изобретение, является летательный аппарат с лопастными устройствами, оснащенный необходимым количеством лопастных устройств, которые вызывают подъемную и движущую силы. Причем лопастное устройство представляет собой лопасти, установленные на внешнею поверхность замкнутых лент, надетых на вращающиеся ведущие и ведомые колеса, при этом положение каждой лопасти по отношению к направлению ее движения устанавливается системой управления, а движущиеся торцы лопастей ограждены защитными внешними корпусами с установленными на них направляющими потока. При полете, маневрировании, взлете, посадке летательного аппарата с лопастными устройствами между преградами допустимо касание боковых поверхностей лопастных устройств к преградам, так как лопастные устройства содержат внешние защитные корпуса.
Поставленная задача решается за счет того, что летательный аппарат с лопастными устройствами содержит два лопастных устройства с защитными внешними корпусами, вызывающих подъемную и движущую силы действующие на летательный аппарат с лопастными устройствами.
Летательный аппарат с лопастными устройствами содержит два лопастных устройства с защитными внешними корпусами, установленных на общем вращающемся валу по разные стороны и на необходимом расстоянии от фюзеляжа, причем общий вращающийся вал кинематически связан с приводными валами лопастных устройств, хвостовое оперение, представляющее собой вертикальные и горизонтальные плоскости, систему управления движением летательного аппарата с лопастными устройствами, причем система управления движением летательного аппарата с лопастными устройствами изменяет положение лопастных устройств относительно горизонтальной поверхности, положение лопастных устройств относительно друг друга, положение направляющих потока лопастных устройств и положение вертикальных и горизонтальных плоскостей хвостового оперения летательного аппарата с лопастными устройствами, изменяет скорость движения лопастей лопастных устройств, зависящую от угловой скорости выходного вала двигателя, двигатель для привода лопастных устройств, фюзеляж для крепления и установки узлов, составляющих летательный аппарат с лопастными устройствами, кроме этого система управления движением летающего аппарата с лопастными устройствами содержит механизм лопастных устройств для изменения положения лопастных устройств относительно горизонтальной поверхности и относительно друг друга, состоящий из рычага лопастных устройств, соединенного через упорный подшипник с серединой дуги, концы которой через упорные подшипники соединены с двумя соосными валами, на удаленных концах которых закреплены оси коромысел, которые соединены тягами с коромыслами лопастных устройств, а близлежащие концы соосных валов имеют не тормозящие резьбы: на одном - правую, на другом - левую, с накрученными на них удлиненными глухими гайками, глухие концы которых соединены внешней обоймой упорного подшипника, в который посажена ось, соединенная с рычагом лопастных устройств через подшипник поступательного движения, соосные валы посажены в упорные подшипники, неподвижные относительно фюзеляжа, при этом положение рычага лопастных устройств в вертикальной плоскости, перпендикулярной оси соосных валов, определяет положение лопастных устройств относительно горизонтальной поверхности, а положение рычага лопастных устройств в плоскости, параллельной оси соосных валов, определяет положение лопастных устройств относительно друг друга, кроме этого система управления движением летательного аппарата с лопастными устройствами содержит механизм потоков для изменения направления потоков воздуха относительно лопастных устройств, состоящий из рычага потоков, соединенного с осью коромысла, посаженной в подшипник, неподвижный относительно фюзеляжа, концы этого коромысла через подвижные элементы четырех гибких кинематических пар шарнирно соединены попарно с концами двух коромысел, оси которых посажены в подшипники, неподвижные относительно соответствующих лопастных устройств, один конец каждого из этих коромысел шарнирно соединен стержнем с направляющими потока соответствующего лопастного устройства, причем оси вращения направляющих потока лежат параллельно в одной плоскости с осями коромысел, посаженными в подшипники, неподвижные относительно соответствующих лопастных устройств, близлежащие к рычагу потоков концы неподвижных элементов гибких кинематических пар соединены попарно с парами втулок, скользящими попарно по параллельным друг другу стержням, неподвижным относительно фюзеляжа, близлежащие к лопастным устройствам концы неподвижных элементов гибких кинематических пар соединены попарно с парами втулок, скользящими попарно по стержням, неподвижным относительно лопастных устройств, при этом наклон рычага потоков определяет направление потока воздуха относительно лопастных устройств, кроме этого система управления движением летательного аппарата с лопастными устройствами содержит механизм оперения для изменения положения вертикальной и горизонтальной плоскостей хвостового оперения относительно фюзеляжа, состоящий из рычага оперения, соединенного через упорный подшипник с серединой дуги, концы которой через подшипники поступательного движения, находящиеся во внутренних обоймах упорных подшипников, неподвижных относительно фюзеляжа, соединены с соосными валами, близлежащие концы которых соединены внешней обоймой упорного подшипника, в который посажена ось, соединенная с рычагом оперения через подшипник поступательного движения, на удаленный конец соосного вала через упорный подшипник установлен поводок, который через подшипник поступательного движения, через ось, соединенную перпендикулярно с внешней поверхностью подшипника поступательного движения и посаженную в упорный подшипник, через внешнюю обойму этого упорного подшипника соединен с рычагом, ось этого рычага посажена в упорный подшипник, неподвижный относительно фюзеляжа, и соединена с осью коромысла с тягами, соединенными с коромыслом вертикальной плоскости, ось которого посажена в неподвижный относительно фюзеляжа упорный подшипник, тяги управления горизонтальной плоскостью с одной стороны соединены с коромыслом, установленным на одном конце дуги так, что ось коромысла совпадает с осью соосных валов, с другой стороны соединены с коромыслом горизонтальной плоскости, ось которого посажена в неподвижный относительно фюзеляжа упорный подшипник, при этом положение рычага оперения в вертикальной плоскости, перпендикулярной оси соосных валов, определяет положение горизонтальной плоскости хвостового оперения, а положение рычага оперения в плоскости, параллельной оси соосных валов, определяет положение вертикальной плоскости хвостового оперения, кроме этого система управления движением летательного аппарата с лопастными устройствами содержит штурвал, в котором по техническим условия могут быть совмещены рычаг лопастных устройств, рычаг потоков, рычаг оперения и рычаг газа, кроме этого летательный аппарат с лопастными устройствами движется по произвольной гладкой или ломаной линии при применении чередующихся комбинаций из положений рычага лопастных устройств, рычага потока, рычага оперения, рычага газа, причем при движении летательного аппарата с лопастными устройствами между преградами допустимо касание боковых поверхностей лопастных устройств к преградам, так как лопастные устройства содержат защитные внешние корпуса.
Система управления движением летательного аппарата с лопастными устройствами содержит механизм управления скоростью движения лопастей лопастных устройств, регулирующий угловую скорость выходного вала двигателя и состоящий из рычага газа, связанного тягами с устройством подачи топлива в камеры сгорания двигателя.
Летательный аппарат с лопастными устройствами неподвижен в воздухе относительно воздуха при горизонтальном положении лопастных устройств, при этом подъемная сила, приложенная к летательному аппарату с лопастными устройствами, равна по величине и противоположно направлена силе тяжести летательного аппарата с лопастными устройствами, причем векторная сумма всех других действующих сил равна нулю.
Летательный аппарат с лопастными устройствами движется в воздухе по вертикальной прямой линии вверх относительно воздуха при горизонтальном положении лопастных устройств, при этом подъемная сила, приложенная к летательному аппарату с лопастными устройствами, больше по величине и противоположно направлена силе тяжести летательного аппарата с лопастными устройствами, причем векторная сумма всех других действующих сил равна нулю.
Летательный аппарат с лопастными устройствами движется по вертикальной прямой линии вниз относительно воздуха при горизонтальном положении лопастных устройств, при этом подъемная сила, приложенная к летательному аппарату с лопастными устройствами, меньше по величине и противоположно направлена силе тяжести летательного аппарата с лопастными устройствами, причем векторная сумма всех других действующих сил равна нулю.
Летательный аппарат с лопастными устройствами движется в воздухе по горизонтальной прямой линии вперед относительно воздуха при наклоне лопастных устройств к носу летательного аппарата с лопастными устройствами, при этом возникшая горизонтальная движущая сила направлена вперед, причем векторная сумма всех других действующих сил равна нулю.
Летательный аппарат с лопастными устройствами движется в воздухе по горизонтальной прямой линии относительно воздуха назад при наклоне лопастных устройств к хвосту летательного аппарата с лопастными устройствами, при этом возникшая горизонтальная движущая сила направлена назад, причем векторная сумма всех других действующих сил равна нулю.
Летательный аппарат с лопастными устройствами вращается в воздухе на горизонтальной поверхности относительно воздуха вокруг вертикальной оси при равенстве по величине и противоположных по направлению возникших горизонтальных движущих сил, вызываемых при наклоне одного лопастного устройства к носу, другого к хвосту, причем векторная сумма всех других действующих сил равна нулю.
Летательный аппарат с лопастными устройствами движется в воздухе по горизонтальной прямой линии боком относительно воздуха при отклонении направляющих потока лопастных устройств, при этом возникшая горизонтальная движущая сила направлена вбок, причем векторная сумма всех других действующих сил равна нулю.
Достигаемый технический результат заключается в применении для летательного аппарата с лопастными устройствами двух лопастных устройств с защитными внешними корпусами, которые создают подъемную и движущую силы, и при полете, маневрировании, взлете, посадке летательного аппарата с лопастными устройствами между преградами допустимо касание боковых поверхностей лопастных устройств к преградам.
Изобретение поясняется чертежами, которые не охватывают и тем более не ограничивают весь объем притязаний данного технического решения, а являются лишь иллюстрирующими материалами частного случая выполнения.
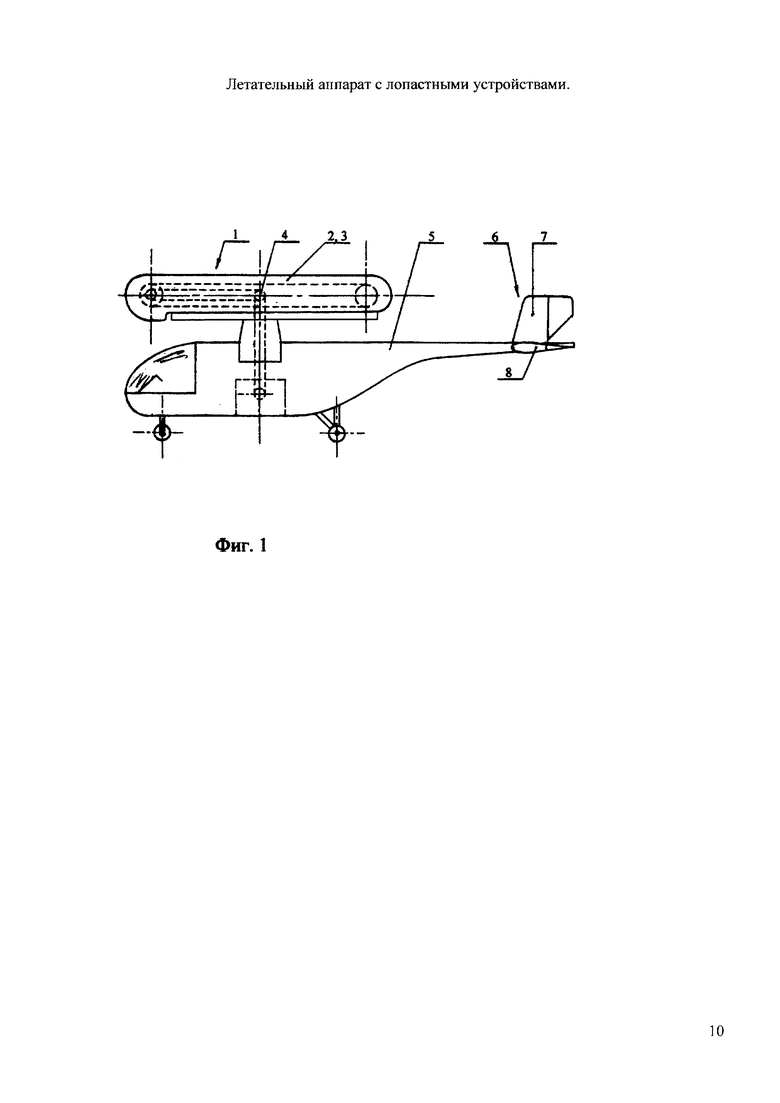
На фиг. 1 - летательный аппарат с лопастными устройствами, вид сбоку.
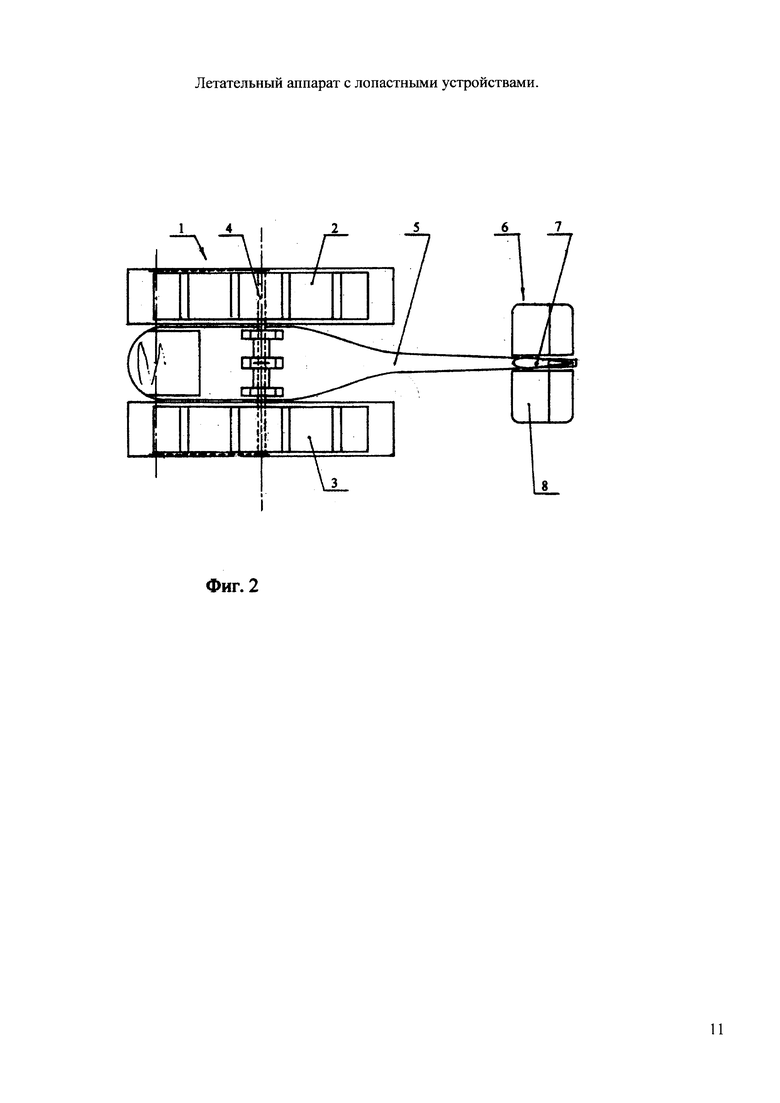
На фиг. 2 - летательный аппарат с лопастными устройствами, вид сверху.
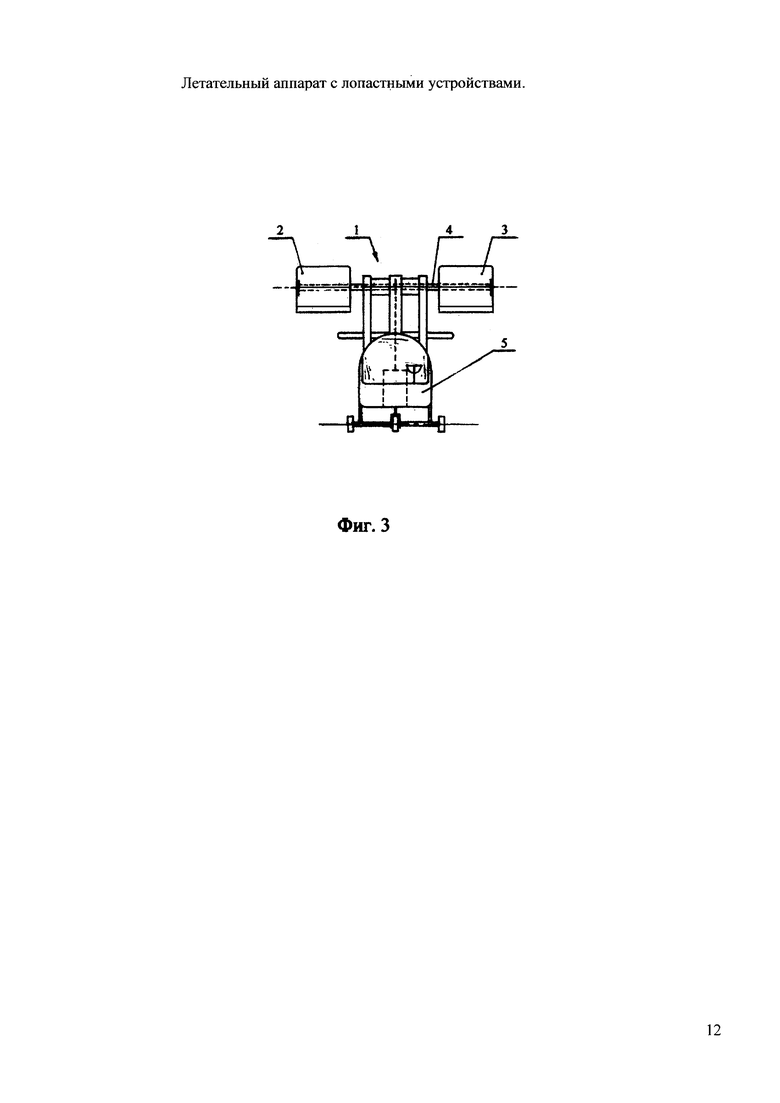
На фиг. 3 - летательный аппарат с лопастными устройствами, вид спереди.
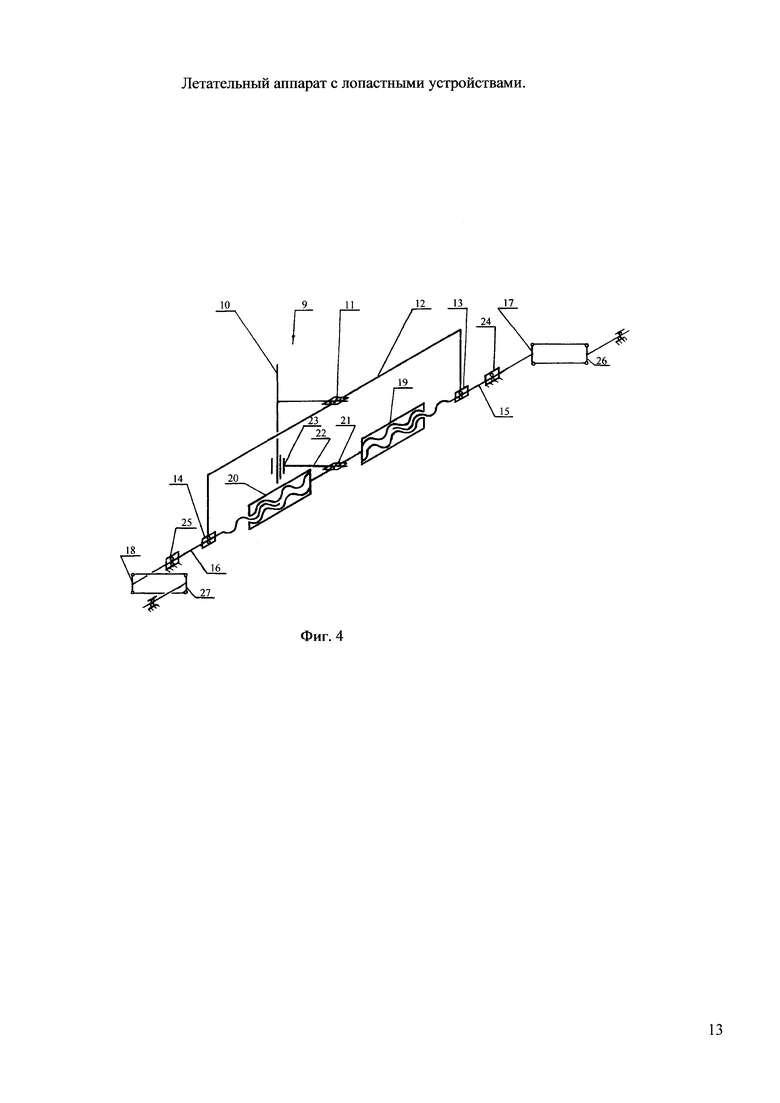
На фиг. 4 - кинематическая схема механизма лопастных устройств для изменения их положения.
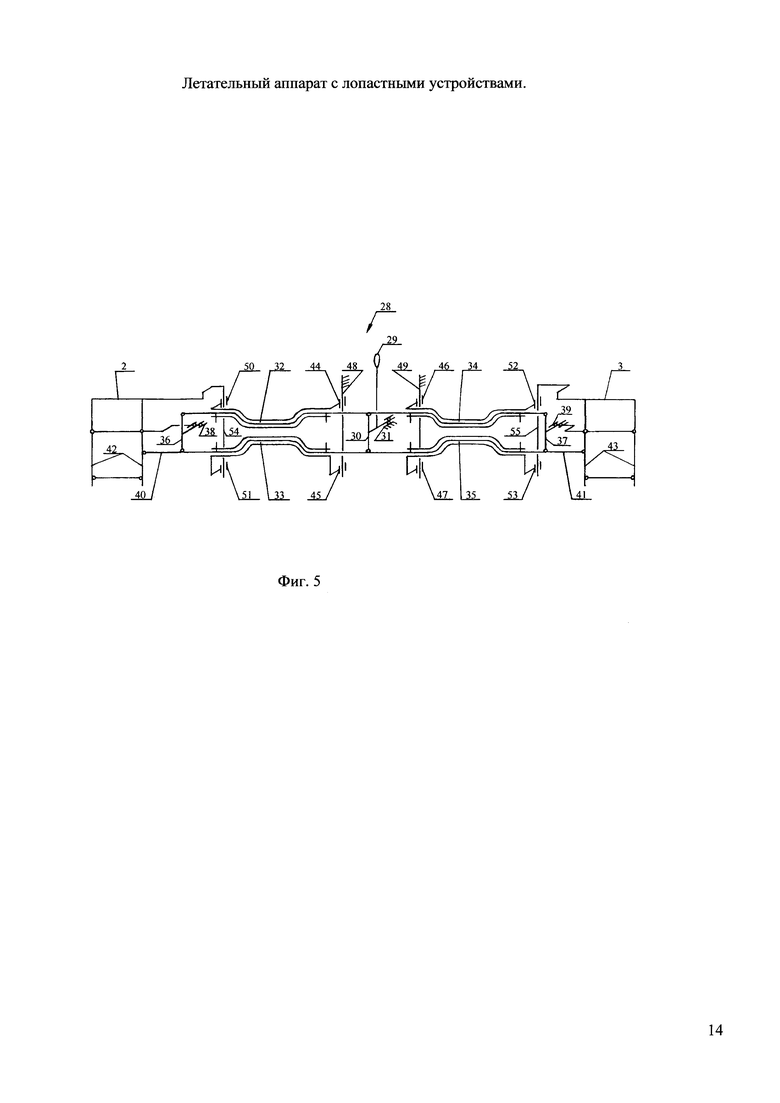
На фиг. 5 - кинематическая схема механизма потоков для изменения направления потоков воздуха относительно лопастных устройств.
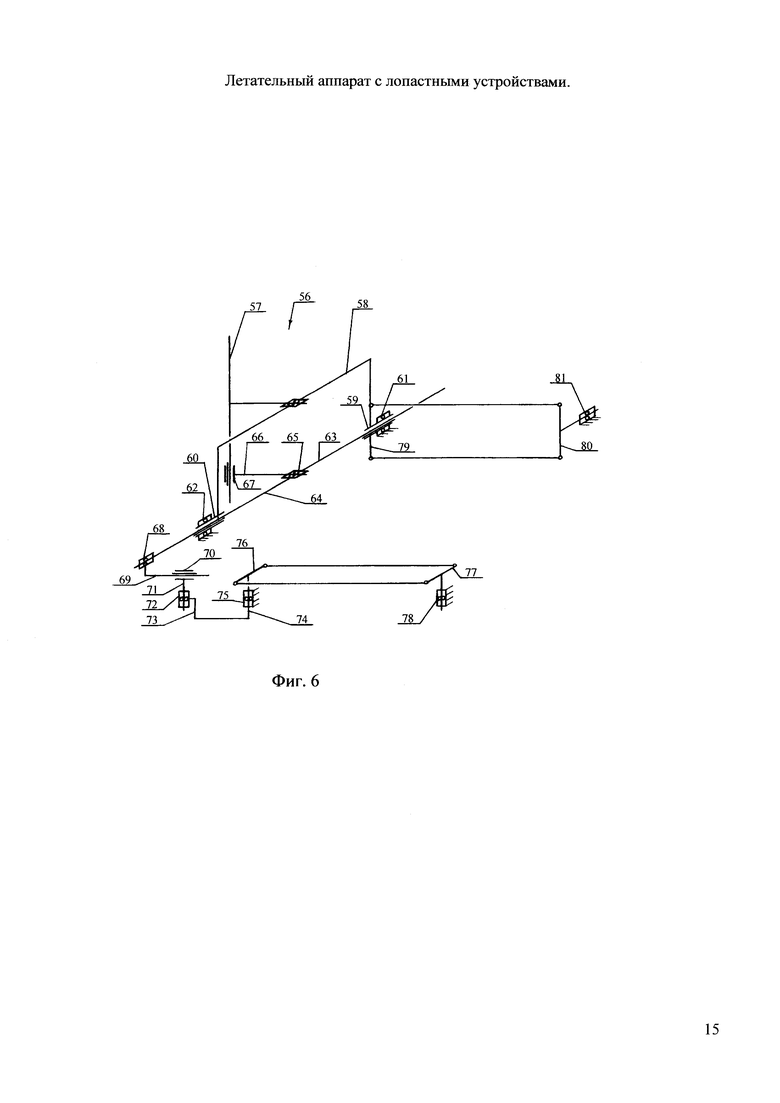
На фиг. 6 - кинематическая схема механизма оперения для изменения положения вертикальной и горизонтальной плоскостей оперения.
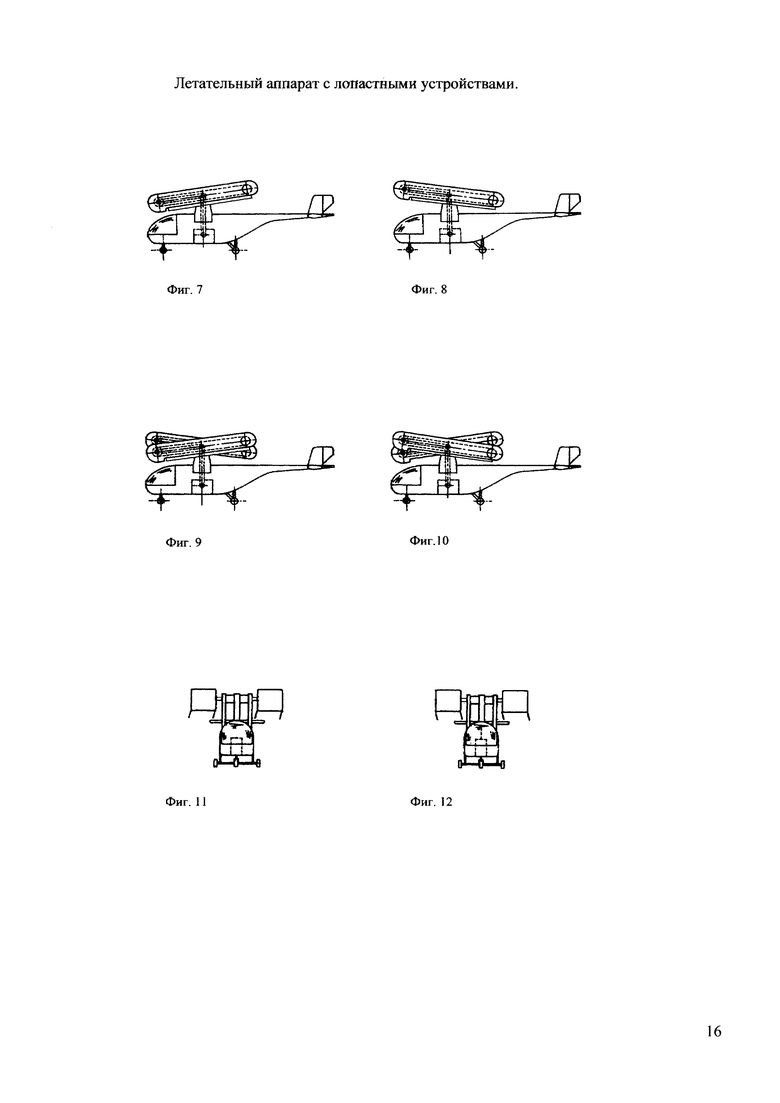
На фиг. 7 - движение летательного аппарата с лопастными устройствами вперед.
На фиг. 8 - движение летательного аппарата с лопастными устройствами назад.
На фиг. 9 - вращение летательного аппарата с лопастными устройствами по часовой стрелке.
На фиг. 10 - вращение летательного аппарата с лопастными устройствами против часовой стрелки.
На фиг. 11 - движение летательного аппарата с лопастными устройствами боком вправо.
На фиг. 12 - движение летательного аппарата с лопастными устройствами боком влево.
Летательный аппарат с лопастными устройствами 1 содержит два лопастных устройства 2 и 3 с защитными внешними корпусами, установленных на общем вращающимся валу 4 по разные стороны и на необходимом расстоянии от фюзеляжа 5, причем общий вращающийся вал 4 кинематически связан с приводными валами лопастных устройств, хвостовое оперение 6, представляющее собой вертикальные 7 и горизонтальные 8 плоскости, систему управления движением летательного аппарата с лопастными устройствами, причем система управления движением летательного аппарата с лопастными устройствами 1 изменяет положение лопастных устройств 2 и 3 относительно горизонтальной поверхности, положение лопастных устройств 2 и 3 относительно друг друга, положение направляющих потока лопастных устройств летательного аппарата с лопастными устройствами 42, 43 и положение вертикальных 7 и горизонтальных 8 плоскостей хвостового оперения 6 относительно фюзеляжа 5, изменяет скорость движения лопастей лопастных устройств, зависящую от угловой скорости выходного вала двигателя, двигатель для привода лопастных устройств, фюзеляж 5 для крепления и установки узлов, составляющих летательный аппарат с лопастными устройствами 1.
Система управления движением летательного аппарата с лопастными устройствами содержит механизм лопастных устройств 9 для изменения положения лопастных устройств 2 и 3 относительно горизонтальной поверхности и относительно друг друга, состоящий из рычага лопастных устройств 10, соединенного через упорный подшипник 11 с серединой дуги 12, концы которой через упорные подшипники 13 и 14 соединены с двумя соосными валами 15 и 16, на удаленных концах которых закреплены оси коромысел 17 и 18, которые соединены тягами с коромыслами 26 и 27 лопастных устройств, а близлежащие концы соосных валов 15 и 16 имеют не тормозящие резьбы: на одном - правую, на другом - левую, с накрученными на них удлиненными глухими гайками 19 и 20, глухие концы которых соединены внешней обоймой упорного подшипника 21, в который посажена ось 22, соединенная с рычагом лопастных устройств 10 через подшипник поступательного движения 23, соосные валы 15 и 16 посажены в упорные подшипники 24 и 25, неподвижные относительно фюзеляжа 5, при этом положение рычага лопастных устройств 10 в вертикальной плоскости, перпендикулярной оси соосных валов 15 и 16, определяет положение лопастных устройств 2 и 3 относительно горизонтальной поверхности, а положение рычага лопастных устройств 10 в плоскости, параллельной оси соосных валов 15 и 16, определяет положение лопастных устройств 2 и 3 относительно друг друга.
Система управления движением летательного аппарата с лопастными устройствами содержит механизм потоков 28 для изменения направления потоков воздуха относительно лопастных устройств 2 и 3, состоящий из рычага потоков 29, соединенного с осью коромысла 30, посаженной в подшипник 31, неподвижный относительно фюзеляжа 5, концы этого коромысла 30 через подвижные элементы четырех гибких кинематических пар 32, 33, 34, 35 шарнирно соединены попарно с концами двух коромысел 36 и 37, оси которых посажены в подшипники 38 и 39, неподвижные относительно соответствующих лопастных устройств 2 и 3, один конец каждого из этих коромысел 36 и 37 шарнирно соединен стержнем 40 или 41 с направляющими потока 42, 43 соответствующего лопастного устройства 2 или 3, причем оси вращения направляющих потока 42 и 43 лежат параллельно в одной плоскости с осями коромысел 36 и 37, посаженными в подшипники 38, 39, неподвижные относительно соответствующих лопастных устройств 2 и 3, близлежащие к рычагу потоков 29 концы неподвижных элементов гибких кинематических пар 32, 33, 34, 35 соединены попарно с парами втулок 44, 45 и 46, 47, скользящими попарно по параллельным друг другу стержням 48, 49, неподвижным относительно фюзеляжа 5, близлежащие к лопастным устройствам 2, 3 концы неподвижных элементов гибких кинематических пар 32, 33, 34, 35 соединены попарно с парами втулок 50, 51 и 52, 53, скользящими попарно по стержням 54, 55, неподвижным относительно лопастных устройств 2, 3, при этом наклон рычага потоков 29 определяет направление потока воздуха относительно лопастных устройств 2, 3.
Система управления движением летательного аппарата с лопастными устройствами 1 содержит механизм оперения 56 для изменения положения вертикальной 7 и горизонтальной 8 плоскостей хвостового оперения 6 относительно фюзеляжа 5, состоящий из рычага оперения 57, соединенного через упорный подшипник с серединой дуги 58, концы которой через подшипники поступательного движения 59 и 60, находящиеся во внутренних обоймах упорных подшипников 61 и 62, неподвижных относительно фюзеляжа, соединены с соосными валами 63 и 64, близлежащие концы которых соединены внешней обоймой упорного подшипника 65, в который посажена ось 66, соединенная с рычагом оперения 57 через подшипник поступательного движения 67, на удаленный конец соосного вала 64 через упорный подшипник 68 установлен поводок 69, который через подшипник поступательного движения 70, через ось 71, соединенную перпендикулярно с внешней поверхностью подшипника поступательного движения 70 и посаженную в упорный подшипник 72, через внешнюю обойму этого упорного подшипника соединен с рычагом 73, ось 74 этого рычага посажена в упорный подшипник 75, неподвижный относительно фюзеляжа, и соединена с осью коромысла 76 с тягами, соединенными с коромыслом 77 вертикальной плоскости 7, ось которого посажена в неподвижный относительно фюзеляжа упорный подшипник 78, тяги управления горизонтальной плоскостью 8 с одной стороны соединены с коромыслом 79, установленным на одном конце дуги 58 так, что ось коромысла 79 совпадает с осью соосных валов 63 и 64, с другой стороны соединены с коромыслом 80 горизонтальной плоскости 8, ось которого посажена в неподвижный относительно фюзеляжа упорный подшипник 81, при этом положение рычага оперения 57 в вертикальной плоскости, перпендикулярной оси соосных валов 63 и 64, определяет положение горизонтальной плоскости 8 хвостового оперения 6, а положение рычага оперения 57 в плоскости, параллельной оси соосных валов 63 и 64, определяет положение вертикальной плоскости 7 хвостового оперения 6.
Система управления движением летательного аппарата с лопастными устройствами содержит штурвал, в котором по техническим условия могут быть совмещены рычаг лопастных устройств, рычаг потоков, рычаг оперения и рычаг газа.
Система управления движением летательного аппарата с лопастными устройствами содержит механизм управления скоростью движения лопастей лопастных устройств, регулирующий угловую скорость выходного вала двигателя и состоящий из рычага газа, связанного тягами с устройством подачи топлива в камеры сгорания двигателя.
Работа устройства осуществляется следующим образом.
Летательный аппарат с лопастными устройствами неподвижен в воздухе относительно воздуха при горизонтальном положении лопастных устройств, при этом подъемная сила, приложенная к летательному аппарату с лопастными устройствами, равна по величине и противоположно направлена силе тяжести летательного аппарата с лопастными устройствами, причем векторная сумма всех других действующих сил равна нулю.
Летательный аппарат с лопастными устройствами движется в воздухе по вертикальной прямой линии вверх относительно воздуха при горизонтальном положении лопатных устройств, при этом подъемная сила, приложенная к летательному аппарату с лопастными устройствами, больше по величине и противоположно направлена силе тяжести летательного аппарата с лопастными устройствами, причем векторная сумма всех других действующих сил равна нулю.
Летательный аппарат с лопастными устройствами движется по вертикальной прямой линии вниз относительно воздуха при горизонтальном положении лопастных устройств, при этом подъемная сила, приложенная к летательному аппарату с лопастными устройствами, меньше по величине и противоположно направлена силе тяжести летательного аппарата с лопастными устройствами, причем векторная сумма всех других действующих сил равна нулю.
Летательный аппарат с лопастными устройствами движется в воздухе по горизонтальной прямой линии вперед относительно воздуха при наклоне лопастных устройств к носу летательного аппарата с лопастными устройствами, при этом возникшая горизонтальная движущая сила направлена вперед, причем векторная сумма всех других действующих сил равна нулю.
Летательный аппарат с лопастными устройствами движется в воздухе по горизонтальной прямой линии относительно воздуха назад при наклоне лопастных устройств к хвосту летательного аппарата с лопастными устройствами, при этом возникшая горизонтальная движущая сила направлена назад, причем векторная сумма всех других действующих сил равна нулю.
Летательный аппарат с лопастными устройствами вращается в воздухе на горизонтальной поверхности относительно воздуха вокруг вертикальной оси при равенстве по величине и противоположных по направлению возникших горизонтальных движущих сил, вызываемых при наклоне одного лопастного устройства к носу, другого к хвосту, причем векторная сумма всех других действующих сил равна нулю.
Летательный аппарат с лопастными устройствами движется в воздухе по горизонтальной прямой линии боком относительно воздуха при отклонении направляющих потока лопастных устройств, при этом возникшая горизонтальная движущая сила направлена вбок, причем векторная сумма всех других действующих сил равна нулю.
Летательный аппарат с лопастными устройствами движется по произвольной гладкой или ломаной линии при применении чередующихся комбинаций из положений рычага лопастных устройств, рычага потока, рычага оперения, рычага газа, причем при движении Летательного аппарата с лопастными устройствами между преградами допустимо касание боковых поверхностей лопастных устройств к преградам, так как они содержат защитные внешние корпуса.
Таким образом, заявляется летательный аппарат с лопастными устройствами, на который действуют подъемная и движущая силы, вызываемые двумя лопастными устройствами с защитными внешними корпусами, и при полете, маневрировании, взлете, посадке летательного аппарата с лопастными устройствами между преградами допустимо касание боковых поверхностей лопастных устройств к преградам.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ МАШУЩЕГО ПОЛЕТА И ПОЛЕТА ПО-САМОЛЕТНОМУ | 1991 |
|
RU2038266C1 |
| Автомат перекоса многороторного летательного аппарата с жестким креплением лопастей и способ его работы | 2020 |
|
RU2749709C1 |
| Автомат перекоса однороторного летательного аппарата и способ его работы | 2020 |
|
RU2740039C1 |
| ЛЕНТОЧНО-ЛОПАСТНОЕ УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ПОТОКА | 2016 |
|
RU2623422C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2480378C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТЯЖЕЛЕЕ ВОЗДУХА | 1998 |
|
RU2142388C1 |
| КОНВЕРТОЛЕТ | 2008 |
|
RU2369525C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2003 |
|
RU2244661C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов тяжелее воздуха. Летательный аппарат содержит два лопастных устройства, установленных на общем валу по разные стороны и на необходимом расстоянии от фюзеляжа, двигатель для привода лопастных устройств, фюзеляж для крепления и установки узлов, составляющих летательный аппарат с лопастными устройствами. Общий вращающийся вал кинематически связан с приводными валами лопастных устройств. Хвостовое оперение представляет собой вертикальную и горизонтальную плоскости. Система управления движением летательного аппарата с лопастными устройствами изменяет положение лопастных устройств относительно горизонтальной поверхности, положение лопастных устройств относительно друг друга, положение направляющих потоков лопастных устройств, положение вертикальных и горизонтальных плоскостей хвостового оперения относительно фюзеляжа, изменяет скорость движения лопастей лопастных устройств, зависящую от угловой скорости выходного вала двигателя. Лопастные устройства содержат защитные внешние корпуса. Достигается повышение безопасности при эксплуатации летательного аппарата. 1 з.п. ф-лы, 12 ил.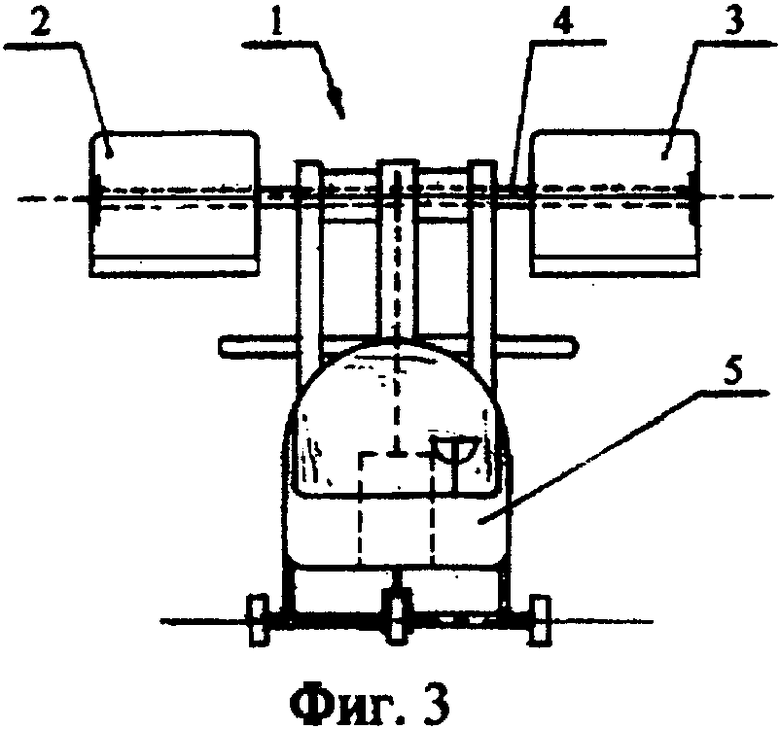
1. Летательный аппарат с лопастными устройствами характеризующийся тем, что содержит два лопастных устройства с защитными внешними корпусами для создания подъемной и движущей сил, установленных на общем вращающимся валу по разные стороны и на необходимом расстоянии от фюзеляжа, причем общий вращающийся вал кинематически связан с приводными валами лопастных устройств, хвостовое оперение, представляющее собой вертикальные и горизонтальные плоскости, систему управления движением летательного аппарата с лопастными устройствами, причем система управления движением изменяет положение лопастных устройств относительно горизонтальной поверхности, положение лопастных устройств относительно друг друга, положение направляющих потока лопастных устройств и положение вертикальных и горизонтальных плоскостей хвостового оперения летательного аппарата с лопастными устройствами, изменяет скорость движения лопастей лопастных устройств, зависящую от угловой скорости выходного вала двигателя, двигатель для привода лопастных устройств, фюзеляж для крепления и установки узлов, составляющих летательный аппарат с лопастными устройствами, кроме этого система управления движением летательного аппарата с лопастными устройствами содержит механизм лопастных устройств для изменения положения лопастных устройств относительно горизонтальной поверхности и относительно друг друга, состоящий из рычага лопастных устройств, соединенного через упорный подшипник с серединой дуги, концы которой через упорные подшипники соединены с двумя соосными валами, на удаленных концах которых закреплены оси коромысел, которые соединены тягами с коромыслами лопастных устройств, а близлежащие концы соосных валов имеют не тормозящие резьбы: на одном - правую, на другом - левую, с накрученными на них удлиненными глухими гайками, глухие концы которых соединены внешней обоймой упорного подшипника, в который посажена ось, соединенная с рычагом лопастных устройств через подшипник поступательного движения, соосные валы посажены в упорные подшипники, неподвижные относительно фюзеляжа, при этом положение рычага лопастных устройств в вертикальной плоскости, перпендикулярной оси соосных валов, определяет положение лопастных устройств относительно горизонтальной поверхности, а положение рычага лопастных устройств в плоскости, параллельной оси соосных валов, определяет положение лопастных устройств относительно друг друга, кроме этого система управления движением летательного аппарата с лопастными устройствами содержит механизм потоков для изменения направления потоков воздуха относительно лопастных устройств, состоящий из рычага потоков, соединенного с осью коромысла, посаженной в подшипник, неподвижный относительно фюзеляжа, концы этого коромысла через подвижные элементы четырех гибких кинематических пар шарнирно соединены попарно с концами двух коромысел, оси которых посажены в подшипники, неподвижные относительно соответствующих лопастных устройств, один конец каждого из этих коромысел шарнирно соединен стержнем с направляющими потока соответствующего лопастного устройства, причем оси вращения направляющих потока лежат параллельно в одной плоскости с осями коромысел, посаженными в подшипники, неподвижные относительно соответствующих лопастных устройств, близлежащие к рычагу потоков концы неподвижных элементов гибких кинематических пар соединены попарно с парами втулок, скользящими попарно по параллельным друг другу стержням, неподвижным относительно фюзеляжа, близлежащие к лопастным устройствам концы неподвижных элементов гибких кинематических пар соединены попарно с парами втулок, скользящими попарно по стержням неподвижным относительно лопастных устройств, при этом наклон рычага потоков определяет направление потока воздуха относительно лопастных устройств, кроме этого система управления движением летательного аппарата с лопастными устройствами содержит механизм оперения для изменения положения вертикальной и горизонтальной плоскостей хвостового оперения относительно фюзеляжа, состоящий из рычага оперения, соединенного через упорный подшипник с серединой дуги, концы которой через подшипники поступательного движения, находящиеся во внутренних обоймах упорных подшипников, неподвижных относительно фюзеляжа, соединены с соосными валами, близлежащие концы которых соединены внешней обоймой упорного подшипника, в который посажена ось, соединенная с рычагом оперения через подшипник поступательного движения, на удаленный конец соосного вала через упорный подшипник установлен поводок, который через подшипник поступательного движения, через ось, соединенную перпендикулярно с внешней поверхностью подшипника поступательного движения и посаженную в упорный подшипник, через внешнюю обойму этого упорного подшипника соединен с рычагом, ось этого рычага посажена в упорный подшипник, неподвижный относительно фюзеляжа, и соединена с осью коромысла с тягами, соединенными с коромыслом вертикальной плоскости, ось которого посажена в неподвижный относительно фюзеляжа упорный подшипник, тяги управления горизонтальной плоскостью с одной стороны соединены с коромыслом, установленным на одном конце дуги так, что ось коромысла совпадает с осью соосных валов, с другой стороны соединены с коромыслом горизонтальной плоскости, ось которого посажена в неподвижный относительно фюзеляжа упорный подшипник, при этом положение рычага оперения в вертикальной плоскости, перпендикулярной оси соосных валов, определяет положение горизонтальной плоскости хвостового оперения, а положение рычага оперения в плоскости, параллельной оси соосных валов, определяет положение вертикальной плоскости хвостового оперения, кроме этого система управления движением летательного аппарата с лопастными устройствами содержит штурвал, в котором по техническим условия могут быть совмещены рычаг лопастных устройств, рычаг потоков, рычаг оперения и рычаг газа, кроме этого летательный аппарат с лопастными устройствами содержит два лопастных устройства с защитными внешними корпусами и при движении между преградами допустимо касание боковых поверхностей лопастных устройств к преградам.
2. Летательный аппарат с лопастными устройствами по п. 1, отличающийся тем, что система управления движением летательного аппарата с лопастными устройствами содержит механизм управления скоростью движения лопастей лопастных устройств, регулирующий угловую скорость выходного вала двигателя и состоящий из рычага газа, связанного тягами с устройством подачи топлива в камеры сгорания двигателя.
| US 2003080242 A1, 01.05.2003 | |||
| WO 2008054234 A1, 08.05.2008 | |||
| АВИАПЛАТФОРМА С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 1994 |
|
RU2090452C1 |
| УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОГО ПОДЪЕМА И ДВИЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2008 |
|
RU2388653C2 |
| WO 2011018697 A1, 17.02.2011. | |||

