Изобретение относится к устройствам для выправки и стабилизации при строительстве, ремонте и текущем содержании железнодорожного пути.
Известно устройство для стабилизации железнодорожного пути, содержащее опирающуюся на ходовые тележки раму, исполнительный механизм, состоящий из рабочей тележки, установленной на раме с возможностью перемещения в вертикальной плоскостигидроцилиндрами,и смонтированного на рабочей тележке вибропривода, механизмы нагружения путевой решетки, образованные тележками, установленными с обеих сторон рабочей тележки вдоль устройства и соединенными с рамой посредством гидроцилиндров нагружения путевой решетки, которые расположены с обеих сторон от продольной плоскости симметрии устройства, и контрольно-измерительную систему положения пути в вертикальной плоскости.
Недостатками устройства являются необходимость применения дополнительного рихтовочного механизма для исправления дефектов пути в плане; отсутствие возможности регулирования усилий рихтовки в зависимости от состояния пути; наличие зон
vi о
00
ь.
О1
некачественной стабилизации балласта, возникающих в результате протекания переходных процессов при изменении давления в гидроцилиндрах механизмов нагружения путевой решетки в процессе регулирования усилий статического прижатия, в зависимости от состояния путевой решетки, что снижает производительность устройства; достаточно высокие энергозатраты при рихтовке, в результате того, что изменение положения путевой решетки производится из статического состояния.
Цель изобретения - повышение производительности,
Для достижения этой цели в устройстве для стабилизации железнодорожного пути, содержащем опирающуюся на ходовые тележки раму, исполнительный механизм, со- стоящий из рабочей тележки, установленной на раме с возможностью перемещения в вертикальной плоскости гидроцилиндрами, и смонтированного на рабочей тележке вибропривода, механизмы нагружения путевой решетки, образованные тележки, установленными с обеих сторон рабочей тележки вдоль устройства и соединенными с рамой посредством гидроцилиндров нагружения путевой решетки, которые расположены с обеих сторон от продольной плоскости симметрии устройства, и контрольно-измерительную систему положения пути в вертикальной плоскости, гидроцилиндры нагружения путевой решетки установлены на раме с возможностью перемещения вдоль устройства гидроцилиндрами, управляемыми при помощи ука- занной контрольно-измерительной системы.
Кроме того, с целью расширения функциональных возможностей путем обеспечения выправки пути в плане, устройство снабжено контрольно-измерительной системой положения пути в плане, смонтированной на раме, и рельсовыми захватами, установленными на рабочей тележке, вибропривод представляет собой гидроцилиндр,соединенныйс электрогидравлическим источником колебаний и управляемый при помощи контрольно-измерительной системы положения пути в плане, причем гидроцилиндр расположен поперек устройства, шток его шар- нирно соединен с рабочей тележкой, а корпус шарнирно закреплен на раме.
На фиг. 1 изображено устройство для стабилизации пути, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг, 4 - схема блока управления виброприводом.
Устройство для стабилизации железко- дорожного пути содержит раму 1, опирающуюся на ходовые тележки 2, перемещающиеся по пути, контрольно-измерительную систему положения пути в плане, состоящую из измерительных тележек 3 и 4 с датчиками 5 и б стрел изгиба пути, соединенными электронным блоком 7, контрольно-измерительную систему положе0 ния пути в вертикальной плоскости, включающую в себя измеритель 8 разности между заданным и действительным положениями пути, связанный с тросом 9 и электронным блоком 7, который содержит
5 дифференциальный усилитель, связанный с сервозолотником 10.
Устройство также содержит исполнительный механизм, состоящий из рабочей тележки 11, установленной на раме 1 с воз0 можностью перемещения гидроцилиндрами 12, вибропривода 13, установленного на тележке 11 и состоящего из гидроцилиндра, корпус которого шарнирно закреплен на раме 1, а шток - на тележке 11. Этот гидроци5 линдр соединен с электрогидравлическим возбудителем колебаний (пульсатором) и расположен поперек устройства. На тележке 11 закреплены рельсовые захваты 14. Устройство содержит механизмы нагру0 жения путевой решетки, состоящие из тележек 15, смонтированных на раме 1 при помощи гидроцилиндров 16 нагружения путевой решетки, которые установлены с возможностью перемещения вдоль устройства
5 при помощи гидроцилиндров 17, шарнирно закрепленных на подвижной рамке 18 с роликами 19, при помощи которых рамка 18 перекатывается вдоль рамы 1 по направляющим 20. Механизмы нагружения путевой
0 решетки располагаются с обеих сторон исполнительного механизма вдоль устройства.
Блок 21 управления указанным пульсатором может быть связан с электронным
5 блоком 7. Блок 21 управления (фиг. 4) состоит из усилителя 22 сигнала ошибки, корректора 23, усилителя 24 мощности, а также измерительного усилителя 25.
Блок 21 управления связан с задающим
0 генератором 26 и блоком 7, а также с сер- воклапаном 27 и датчиком 28 обратной связи.
Ограничение величины перемещения механизмов нагружения вдоль устройства
5 (оси пути) может производиться конечными выключателями 29 (фиг. 1).
Устройство работает следующим образом.
В рабочем режиме механизмы нагруже- ния располагаются на одинаковом расстоянии оттележки 11 и производят статическое обжатие путевой решетки 30. Вибровозбуждение путевой решетки осуществляется виброприводом 13, например, электрогидравлическим пульсатором.
Генератор 26 (фиг. 4) задает сигнал через усилитель 22 сигнала ошибки, корректор 23, усилитель 24 мощности, который подается на сервоклапан 27, управляющий положением поршня пульсатора. Кроме того датчик 28 обратной связи по перемещению, установленный в корпусе пульсатора, через измерительный усилитель 25 связан с усилителем 22, что позволяет корректировать величину входного сигнала.
Шток пульсатора, связанный с тележкой 11, передается вибровозбуждение через колеса тележки и захваты 14 на путевую решетку.
Потенциометрические датчики 5 и 6 стрел изгиба фиксируют отклонение положения путевой решетки в плане, при этом электронный блок 7 выдает сигнал на сдвиг путевой решетки, поступающий в блок 21 управления пульсатором и суммирующийся с сигналом задающего генератора 26 и датчика 28 обратной связи. Блок 21 управления дает команду на дополнительное перемещение штока пульсатора в ту или другую сторону. Шток смещает путевую решетку 30, не прекращая вибровоздействия до момента, когда она займет надлежащее положение.
Таким образом, может осуществляться вибровоздействие на путевую решетку и ее рихтовка (выправка в плане).
В случае, когда основной задачей, выполняемой устройством, является операция стабилизации, оператор подключает серво- золотник 10, управляющий перемещением механизмов нагружения (их гидроцилиндрами 17), к контрольно-измерительной системе положения пути в вертикальной плоскости.
Например, это может быть измеритель 8 разности между заданным и действительным положениями пути, связанный с тросом 9, который фиксирует отклонение вертикального положения пути. В случае, если путь оказывается в данном месте приподнятым, сигнал от измерителя 8 поступает в блок 7, содержащий дифференциальный усилитель, связанный с сервозолотником 10. В зависимости от величины разности между заданным и действительным положениями пути, сигнал изменяется, а соответственно, изменяется и положение механизмов нагружения устройства вдоль него. Чем больше разница между заданным и действительным положениями пути, тем ближе тележки 15 располагаются к тележке 11, Таким образом, осуществляется регулировка уровня воздействия исполнительного механизма на путевую решетку, а, следовательно, и величины осадки пути.
Ограничение перемещения механизмов нагружения устройства осуществляется конечными выключателями 29. Кроме того, до0 полнительное статическое нагружение путевой решетки может осуществляться гидроцилиндрами 12.
В прототипе регулировка величины статического прижатия осуществляется путем
5 изменения перепада давлений в штоковой и поршневой полостях гидроцилиндра механизма нагружения. Предложенное устройство отличается тем, что суммарное воздействие на путевую решетку, изменяю0 щееся при перемещении механизмов нагружения относительно тележки 11, позволит избежать влияния забросов давления на качество стабилизации при изменении величины статического нагружения.
5 В случае, когда основной задачей, выполняемой машиной, является операция рихтовки, оператор подключает сервозолот- ник 10, управляющий перемещением механизмовнагруженияк
0 контрольно-измерительной системе положения пути в плане. Потенциометрические датчики 5 и 6 стрел изгиба фиксируют отклонение положения путевой решетки в плане, при этом электронный блок 7 выдает сигнал
5 на сервоклапан 10, управляющий перемещением механизмов нагружения (гидроцилиндрами 17), и затем на сдви путевой решетки. Чем больше отклонение путевой решетки в плане от заданного, тем дальше
0 оттележки 11 раздвигаются тележки 15, увеличивая таким образом базу рихтовки, вместе с тем производится вибронагружение путевой решетки и частичная стабилизация ее положения.
5Устройство позволяет производить рихтовку путевой решетки совместно с частичной стабилизацией ее положения при достаточно больших отклонениях в плане и может быть использовано при черновой об0 работке пути.
Формула изобретения 1. Устройство для стабилизации железнодорожного пути, содержащее опирающуюся на ходовые тележки раму,
5 исполнительный механизм, состоящий из рабочей тележки, установленной на раме с возможностью перемещения в вертикальной плоскости гидроцилиндрами, и смонтированного на рабочей тележке вибропривода, механизмы нагружения путевой решетки, образованные тележками, установленными с обеих сторон рабочей тележки - вдоль устройства и соединенными с рамой посредством гидроцилиндров на- гружения путевой решетки, которые расположены с обеих сторон от продольной плоскости симметрии устройства, и контрольно-измерительную систему положения пути в вертикальной плоскости, отличаю щ е е с я что, с целью повышения производительности, гидроцилиндры нагруже- ния путевой решетки установлены на раме с возможностью перемещения вдоль устройства гидроцилиндрами, управляемыми при помощи указанной контрольно-измерительной системы.
0
2. Устройство по п. 1,отличающёе- с я тем, что, с целью расширения функциональных возможностей путем обеспечения выправки пути в плане, оно снабжено контрольно-измерительной системой положения пути в плане, смонтированной на раме, и рельсовыми захватами, установленными на рабочей тележке, вибропривод представляет собой гидроцилиндр, соединенный с электрогидравлическим источником колебаний и управляемый при помощи контрольно-измерительной системы положения пути в плане, причем гидроцилиндр расположен поперек устройства, шток его шарнирно соединен с рабочей тележкой, а корпус шарнирно закреплен на раме.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подбивки и выправки по уровню железнодорожного пути | 1973 |
|
SU500322A1 |
| Машина для выправки железнодорожного пути | 1977 |
|
SU704468A3 |
| Подвижная шпалоподбивочная нивелировочная и рихтовочная машина | 1983 |
|
SU1409135A3 |
| ВЫПРАВОЧНО-ПОДБИВОЧНАЯ МАШИНА | 2009 |
|
RU2392366C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНАЯ МАШИНА | 2009 |
|
RU2398062C1 |
| Устройство для подбивки шпал и выправки пути для путевой машины со смонтированной на ходовых тележках рамой | 1983 |
|
SU1279537A3 |
| Путевая машина | 1983 |
|
SU1137133A1 |
| Непрерывно перемещающаяся машина для распределения и уплотнения щебеночной балластной призмы железнодорожного пути | 1989 |
|
SU1768033A3 |
| Устройство для подъема и рихтовки пути | 1987 |
|
SU1404566A1 |
| УСТРОЙСТВО ДЛЯ ВЫПРАВКИ РЕЛЬСОВОГО ПУТИ В ПЛАНЕ | 1995 |
|
RU2075568C1 |
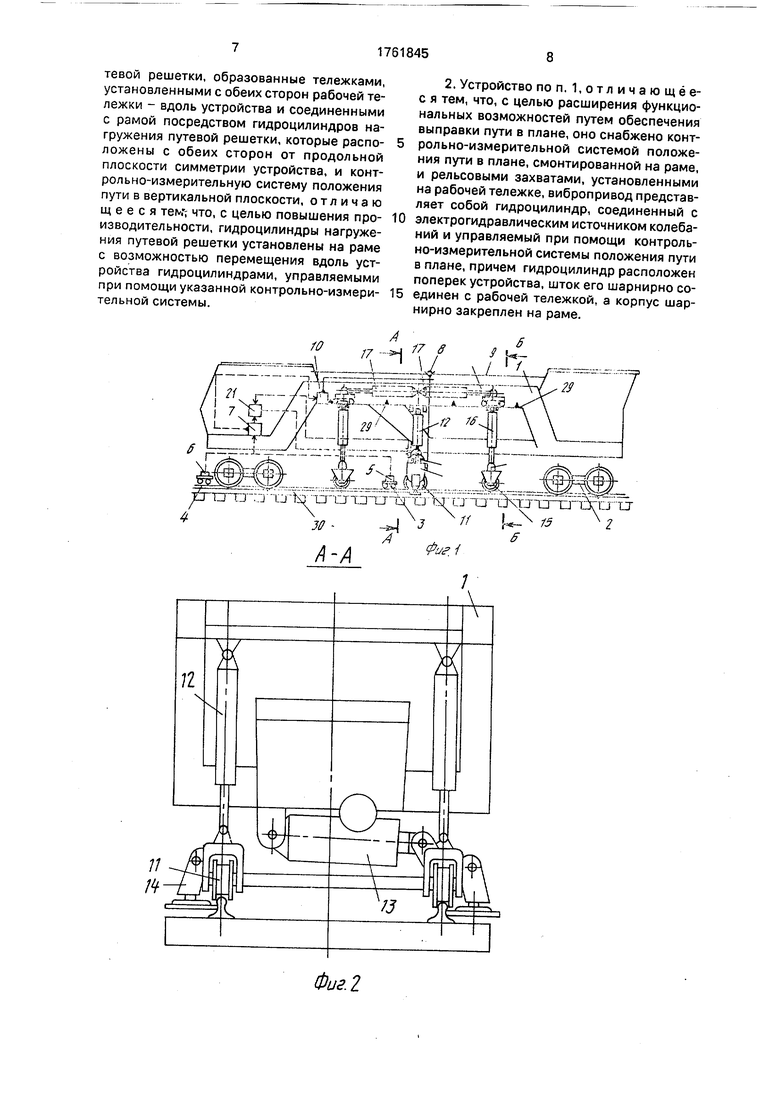

Использование: выправка положения железнодорожного пути, в частности стабилизация этого положения. Сущность изобретения: устройство содержит раму 1, опирающийся на ходовые тележки 2, контрольно-измерительную систему положения пути в плане, состоящую из измерительных тележек 3 и 4 с датчиками 5 и 6 стрел изгиба пути, контрольно-измерительную систему положения пути в вертикальной плоскости, включающую в себя измеритель 8 положения пути и трос 9, исполнительный механизм, состоящий из рабочей тележки 11, установленной на раме 1 с возможностью перемещения по высоте гидроцилиндрами 12, вибропривода , установленного на тележке 11. Устройство также содержит меха- низмы нагружения путевой решетки, состоящие из тележек, соединенных с рамой 1 гидроцилиндрами нагружения путевой решетки, которые установлены с возможностью перемещения вдоль устройства гидроцилиндрами 17. Сервозолотник 10, управляющий гидроцилиндрами 17, соединяется с контрольно-измерительными системами и в зависимости от величины отклонения положения пути тележки механизма нагружения путевой решетки перемещаются относительно тележки 11. Например, чем больше отклонение путевой решетки в плане от заданного, тем дальше от тележки 11 отодвигаются тележки механизма нагружения путевой решетки, увеличивая базу рихтовки пути. 1 з. п. ф-лы, 4 ил. (Л С
.Г:У О Ц П ТиТЗТТТЗ О LTJTT
V чуЛ- rf -,
Фиг. 2
«L
1761845
5-5
/7
/
&
пш
Фиг.З
| Машина для уплотнения балластного слоя под шпалами железнодорожного пути | 1973 |
|
SU893140A3 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
