Изобретение относится к области точного приборостроения.
Рабочий режим ротора ЭСГ заключается в его вращении с номинальной угловой скоростью вокруг оси максимального момента инерции, направленного вдоль оси вакуумной камеры (ВК), в которую заключен ротор.
Для приведения ротора в рабочий режим необходимо [1]:
- взвесить ротор в ВК с помощью трехосного электрического подвеса;
- раскрутить ротор с помощью вращающегося электромагнитного поля (разгонного статора). При этом из-за отсутствия в ЭСГ арретиров направление оси симметрии ротора в ВК перед включением разгонного статора произвольно;
- задемпфировать нутационные колебания оси симметрии ротора, возникающие из-за ее непараллельности оси разгонного статора. Демпфирование колебаний до соответствующего уровня осуществляется с помощью магнитного поля специальных катушек, на которые подается постоянный ток. Постоянное магнитное поле также устанавливает ось симметрии ротора по направлению оси катушек. При достижении ротором рабочей скорости и уменьшении его угловых колебаний катушки разгонного статора и демпфирования выключаются.
С целью уменьшения времени демпфирования применяется гашение колебаний управляемым магнитным полем [2] ("активное" демпфирование). В этом случае возникает необходимость измерять быстро меняющуюся угловую ориентацию ротора, проводить обработку и формировать магнитное поле, следящее за положением ротора. Использование "активного" демпфирования требует сложных электродинамических и микропроцессорных устройств.
В качестве прототипа для предлагаемого способа выбрана последовательность действий по приведению в рабочий режим ротора ЭСГ разработки ЦНИИ "Электроприбор" [3].
Ротор, находящийся в ВК, взвешивается с помощью трехосной электродинамической следящей системы подвеса, разгоняется вращающимся электромагнитным полем катушек разгонного статора в течение 30 секунд, с помощью постоянного электромагнитного поля в течение 45 минут гасятся нутационные колебания оси кинетического момента ротора (оси ротора) и этим же полем ось ротора приводится к оси катушек, совпадающей с осью симметрии ВК, и затем доразгоняется до рабочей скорости.
Наиболее существенным недостатком описанного выше способа приведения ротора ЭСГ в рабочий режим является длительное (45 минут) время демпфирования нутационных колебаний, т.к. с уменьшением их амплитуды моменты от токов Фуко, демпфирующие эти колебания, резко падают. Это накладывает ограничение на время готовности прибора, в том числе увеличивает время входа в тепловой режим.
Задачей предлагаемого изобретения является ускорение процесса приведения ротора ЭСГ в рабочий режим.
Поставленная задача достигается тем, что для приведения ротора ЭСГ в рабочий режим дополнительно к взвешиванию ротора в управляемом трехкоординатном электрическом поле, разгону ротора с помощью вращающегося электромагнитного поля и приведению вектора кинетического момента ротора в ось, связанную с ВК, с помощью постоянного электромагнитного поля, осуществляемыми в способе-прототипе, одновременно с включением электромагнитных полей создают по одной из координат управляемого электромагнитного поля на короткий промежуток времени (менее 1 минуты) линейные колебания ротора, амплитуда которых равна величине зазора между ВК и ротором.
Реализация этого способа не требует разработки сложных электродинамических и микропроцессорных устройств, а использует возможности управляемого электрического подвеса изменять линейное положение ротора внутри ВК.
Рассмотрим сущность предлагаемого способа. Способ состоит из взвешивания ротора в управляемом трехкоординатном электрическом поле с одновременным включением электромагнитных вращающихся и постоянных полей и созданием на короткий промежуток времени (менее 1 минуты) по одной из координат управляемого электрического поля подвеса линейных колебаний ротора, амплитуда которых равна величине зазора между ВК и ротором. При таких линейных колебаниях ротора его поверхность касается (скользит по) внутренней поверхности ВК, например, по ограничительным упорам, служащим для обеспечения взвешивания и, в ряде случаев, безаварийной посадки [4]. Это скольжение дает возможность организовать момент, по направлению противоположный мгновенной угловой скорости ротора, который гасит его нутационные колебания.
Опишем движение сферического ротора ЭСГ, совершающего вынужденные линейные колебания в ВК под действием переменной силы, создаваемой электрическим подвесом, с такой амплитудой, чтобы поверхность ротора периодически контактировала с поверхностями ограничительных элементов (элементов опоры). С ротором свяжем систему координат OXYZ, оси которой направлены по главным осям инерции ротора, а с ВК - неподвижную систему координат OX1Y1Z1 Угловое положение ротора относительно корпуса удовлетворяет уравнениям Эйлера в форме Коши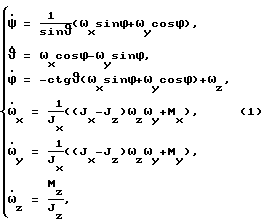
где Jz, Jx - осевой и экваториальный главные моменты инерции ротора;
ωx, ωy, ωz, Мх, My, Mz - проекции угловой скорости и моментов внешних сил на соответствующие подвижные оси;
ψ, θ и ϕ - углы Эйлера.
Под моментом внешних сил далее подразумевается момент трения, действующий при периодических контактах поверхности ротора с ограничительными упорами и рассматриваемый как момент сухого трения. Этот момент в проекциях на оси системы координат OXYZ равен
M=CM1, (2)
где С - матрица перехода от системы координат OX1Y1Z1 к OXYZ.
Матрица С вычисляется как произведение матриц поворотов на каждый из углов Эйлера
C = CϕCϑCψ, (3)
где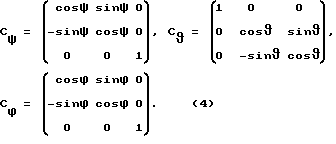
Вектор момента внешних сил M1 в системе координат OX1Y1Z1 определяется в каждом частном случае расположения ограничительных упоров как сумма векторных произведений вектор-радиуса контактирующего упора на вектор силы трения.
Вектор силы трения рассчитывается по формуле
где Fi - вектор силы трения,
i - номер ограничительного упора;
Fo - абсолютная величина силы трения;
Ri - вектор-радиус i-го упора;
Ω1 - вектор мгновенной угловой скорости ротора в системе координат OX1Y1Z1;
n - общее количество упоров, контактирующих с ротором в процессе демпфирования.
Ω1 = CтΩ, (6)
где Ω - вектор мгновенной угловой скорости в системе координат OXYZ.
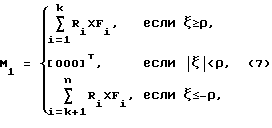
где k - количество упоров, контактирующих с ротором при его перемещении в положительном направлении;
ξ - относительное перемещение центра ротора вдоль оси подвеса;
ρ - граница контакта ротора и элементов опоры.
Колебания ротора происходят по гармоническому закону:
ξ(t) = sin(2πfkt), (8)
где fk - частота вынужденных колебаний ротора в подвесе.
Численное интегрирование уравнений (1) с учетом выражений для Мх, My и Мz (2), (5) и (7) для некоторых частных случаев выполнено на ПК с применением математического пакета MATLAB,
Варьировались следующие параметры:
начальная угловая ориентация ротора;
начальная частота вращения ротора;
коэффициент трения;
частота вынужденных линейных колебаний ротора в подвесе.
При моделировании были постоянны:
радиус ротора 0,025 м;
количество контактирующих ограничительных упоров n=4 (k=2),
размещение ограничительных упоров в ВК: ψ1 = 160°, θ1 = 45°, ψ2 = 160°, 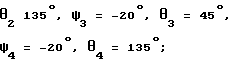
осевой момент инерции Jz=1,0•10-5 кгм2;
экваториальный момент инерции Jx=0,9•10-5 кгм2.
Проведенные вычислительные эксперименты показали, что в процессе демпфирования ротор гироскопа приходит к ближайшему ограничительному упору вне зависимости от частоты вращения ротора (20...40 Гц), частоты вынужденных колебаний (10...40 Гц) и коэффициента трения (0,1...0,4). Так, из начальных положений ψo = 160°, Q0 = 40° и ψo = 160°, ϑo = 50° ротор стремится к ориентации ψ = 160°, ϑ = 45° (упор 1), а из начальных положений ψo = 160°, ϑo = 130° и ψo = 160°, ϑo = 140° - к ориентации ψ = 160°, ϑ = 135° (упор 2).
При этом с увеличением начальной частоты вращения ротора  возрастает продолжительность процесса демпфирования (в данном расчете с 1...1,5 с до 2. . . 2,5 с). Частота вынужденных колебаний fk не оказывает существенного влияния на процесс демпфирования, а увеличение коэффициента трения μ повышает эффективность демпфирования, но при этом возрастают потери собственной частоты вращения (в данном расчете с Δf = 5 Гц до Δf = 10 Гц).
возрастает продолжительность процесса демпфирования (в данном расчете с 1...1,5 с до 2. . . 2,5 с). Частота вынужденных колебаний fk не оказывает существенного влияния на процесс демпфирования, а увеличение коэффициента трения μ повышает эффективность демпфирования, но при этом возрастают потери собственной частоты вращения (в данном расчете с Δf = 5 Гц до Δf = 10 Гц).
В ЦНИИ "Электроприбор" проведены экспериментальные работы, показавшие высокую эффективность гашения угловых колебаний ротора ЭСГ с использованием вынужденных линейных колебаний ротора до касания ограничительных упоров. Работы показали, что амплитуды колебаний ротора уменьшаются с десятков угловых градусов до долей угловых секунд за 10...20 с.
Литература
1. Малеев П.И. Новые типы гироскопов - Л: Судостроение, 1971. -160 с.
2. Воскобойников Р. Л. и др. "Электростатический гироскоп". Заявка 99103449/28 (003483) от 18.02.1999 г. Решение о выдаче патента от 26.04.2001 г.
3. Изделие "Скандий-К". Технические условия ДНИЯ.462126 ТУ (Приложение 1).
4. Шипилов С. В. Аналитическое исследование режимов посадок ротора электростатического гироскопа. Гироскопия и навигация 1998, 3, с.65-71.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИСПЫТАНИЙ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА НА УДАРНОЕ ВОЗДЕЙСТВИЕ | 2006 |
|
RU2316745C1 |
| СПОСОБ ОРИЕНТАЦИИ ПОЛЯРНОГО ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА КОРАБЕЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2006 |
|
RU2308004C1 |
| СПОСОБ ПРИВЕДЕНИЯ В РАБОЧЕЕ СОСТОЯНИЕ ЭЛЕКТРОСТАТИЧЕСКОГО ШАРОВОГО ГИРОСКОПА | 2001 |
|
RU2206874C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НОМИНАЛЬНОЙ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2004 |
|
RU2269745C1 |
| СПОСОБ АВТОКОМПЕНСАЦИИ УХОДОВ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2005 |
|
RU2296298C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2001 |
|
RU2193161C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 2002 |
|
RU2208764C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2001 |
|
RU2193162C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВЕСОМ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2007 |
|
RU2338999C1 |
Изобретение относится к области точного приборостроения. Технический результат - ускорение процесса приведения ротора в рабочий режим. Взвешивают ротор в управляемом трехкоординатном электрическом поле. Разгоняют ротор с помощью вращающегося электромагнитного поля и приводят вектор кинетического момента ротора в ось, связанную с вакуумной камерой с помощью постоянного электромагнитного поля. Одновременно с включением электромагнитных полей создают по одной из координат управляемого электромагнитного поля на короткий промежуток времени (менее 1 мин) линейные колебания ротора, амплитуда которых равна величине зазора между вакуумной камерой и ротором.
Способ приведения ротора электростатического гироскопа в рабочий режим, согласно которому взвешивают ротор в управляемом трехкоординатном электрическом поле, с помощью вращающегося электромагнитного поля разгоняют ротор до номинальных оборотов и одновременно с помощью постоянного электромагнитного поля приводят его вектор кинетического момента в ось, связанную с вакуумной камерой, отличающийся тем, что одновременно с включением электромагнитных полей создают по одной из координат управляемого электрического поля на короткий промежуток времени, например, менее 1 мин, линейные колебания ротора, амплитуда которых равна величине зазора между вакуумной камерой и ротором.
| RU 99103449 A1, 27.11.2000 | |||
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2167396C2 |
| US 3906804, 23.09.1975 | |||
| СТАТОР СФЕРИЧЕСКОГО МАГНИТНОГО ПОДВЕСА | 1992 |
|
RU2069313C1 |

