Изобретение относится к области прецизионного приборостроения и может быть использовано при производстве и эксплуатации электростатических гироскопов со сферическим ротором и датчиком угла, расположенным на полюсе ротора.
Известен способ определения погрешности электростатического гироскопа с полюсным датчиком угла [Технический отчет по теме "Фрегат". Предприятие ЦНИИ "Электроприбор", 1987г.].
Способ реализуется при выполнении следующих технологических операций.
1. Гироскоп устанавливают на поворотном основании.
2. Ориентируют продольную ось гироскопа параллельно оси вращения Земли.
3. Приводят его в рабочее состояние, для чего:
- взвешивают ротор в электростатическом поле подвеса,
- разгоняют ротор до рабочей скорости,
- демпфируют нутационные колебания ротора,
- приводят ось вращения ротора к продольной оси корпуса прибора.
4. Измеряют сигналы датчика угла гироскопа на заданном промежутке времени.
5. По результатам измерений рассчитывают значение нестабильности скорости ухода ротора (погрешность гироскопа).
Недостатком способа является малая точность определения погрешности. Недостаток обусловлен тем, что датчик угла имеет малый диапазон измерения. Из-за вращения Земли и наличия технологических погрешностей изготовления ротор прибора отклоняется от первоначального положения за короткое время. Длительные измерения невозможны. Способ позволяет только качественно оценить значение погрешности.
Известен также способ определения погрешности электростатического гироскопа с полюсным датчиком угла ["Инструкция по регулированию КФ 4.012.098 И1". Предприятие ЦНИИ "Электроприбор", 1989 г.], который принимаем за прототип.
Способ реализуется при выполнении следующих технологических операций.
1. Гироскоп устанавливают на платформу двухосного измерительного стенда в положение, при котором продольная ось корпуса гироскопа параллельна оси вращения платформы.
2. Ориентируют стенд в положение, при котором:
- ось вращения наружного карданового кольца платформы находится в плоскости меридиана и перпендикулярна оси вращения Земли,
- ось вращения внутреннего карданового кольца платформы - в плоскости горизонта,
- ось вращения платформы путем ее разворота вокруг оси вращения внутреннего кольца устанавливают параллельно оси вращения Земли.
3. Приводят гироскоп в рабочее состояние, для чего
- взвешивают ротор в электростатическом поле подвеса,
- разгоняют ротор до рабочей скорости,
- демпфируют нутационные колебания ротора,
- приводят ось вращения ротора к продольной оси корпуса прибора.
4. Включают гироскоп в качестве чувствительного элемента двухосного гиростабилизатора. Для этого первый выход двухкоординатного датчика угла прибора через усилитель-преобразователь подключают к электродвигателю, установленному на оси наружного кольца. Второй выход датчика через второй усилитель-преобразователь подключают к электродвигателю, установленному на оси внутреннего кольца.
5. После затухания переходного процесса, обусловленного выделением тепловой энергии при разгоне, демпфировании и приведении оси ротора (через 8-10 ч после замыкания следящих систем гиростабилизатора) в течение 120 часов осуществляют измерение выходных сигналов датчиков угла гиростабилизатора, пропорциональных углам разворота платформы вокруг оси внутреннего и наружного кардановых колец (β и γ).
6. По результатам измерений строят годограф движения оси вращения ротора в угловых координатах β и γ.
7. По параметрам годографа определяют значение нестабильности скорости ухода δω гироскопа из соотношения
δω = ΔRωз,
где ΔR - разность максимального и минимального радиусов годографа;
ωз - скорость вращения Земли.
8. Определяют погрешность гироскопа, сравнивая значение δω, рассчитанное по п. 7, с эталонным значением (в идеальном случае с δω = 0). Рассчитанное значение нестабильности скорости ухода гироскопа не должно превышать допускаемого значения.
Недостатком способа является малая достоверность определения погрешности гироскопа. Известно, что точность измерительных стендов должна быть на порядок выше точности испытуемых гироскопов. С увеличением точности гироскопов необходимо увеличивать точность стендов [У. Ригли и др. "Теория, проектирование и испытание гироскопов". -М.: Мир, 1972 г., стр. 353]. Известно также, что в настоящее время дальнейший рост точности гироскопов (документально зафиксировано) существенно сдерживается отсутствием соответствующего испытательного оборудования.
Возможности по разработке стендов ограничены современным уровнем элементной базы. В связи с этим возникает задача по определению истинной точности гироскопов на существующем оборудовании без увеличения его точности, связанной, например, с внесением в стенд конструкторских изменений.
Известно, что в качестве датчиков угла платформы широко используются индукционные датчики. Выходная характеристика реальных датчиков неодинакова в диапазоне их измерений. В общем случае имеется зона нечувствительности и рабочий участок, нелинейность которого возрастает с увеличением отклонения от нулевого положения. В процессе испытаний гироскопа из-за его осевого дисбаланса (что всегда имеется в реально изготавливаемых гироскопах) происходит отклонение оси вращения ротора от оси вращения Земли (отклонение датчиков платформы от первоначального нулевого положения). При этом в результате измерений появляется погрешность, обусловленная нелинейностью характеристики датчика (тем больше, чем больше отклонение). Достоверность определения погрешности гироскопа мала. Появляется вероятность, что истинные параметры прибора на этом стенде не будут выявлены.
Задачей настоящего изобретения является повышение достоверности результатов измерений (определения погрешности) при неизменной точности измерительного стенда.
Поставленная задача решается тем, что в известном способе определения погрешности электростатического гироскопа, основанном на измерении выходных сигналов датчиков угла поворота платформы, выходные сигналы измеряют, начиная с переходных процессов, выставляют ось вращения внутреннего кольца в плоскости горизонта, разворачивают платформу вокруг этой оси на угол βo, определяемый по результатам измерений во время переходных процессов из соотношения
где βl,γl - результаты измерений углов на переходных процессах,
K1 = (γl+1-γl)/(βl+1-βl),
K2 = (γl+2-γl+1)/(βl+2-βl+1),
совмещают ось вращения ротора с продольной осью корпуса и после затухания переходного процесса производят измерение сигналов датчиков угла платформы.
Предлагаемое изобретение поясняется чертежом, на котором приведена принципиальная схема включения прибора для проведения измерений.
На чертеже приняты следующие обозначения:
1 - электростатический гироскоп со сферическим ротором,
2 - внутреннее кольцо, выполненное заодно с платформой стенда,
3 - наружное кольцо двухосного подвеса,
4 - двухкоординатный датчик угла гироскопа,
5, 7 - усилитель-преобразователь следящей системы,
6, 8 - двигатель стабилизации,
9, 10 - датчики угла стенда,
O1X1Y1Z1 - оси, связанные с гироскопом,
OXYZ - оси, связанные с двухосным подвесом стенда,
ωз - вектор угловой скорости вращения Земли,
Н - вектор кинетического момента ротора гироскопа.
Предлагаемый способ реализуется при выполнении следующих технологических операций.
1. Гироскоп 1 устанавливают на платформе 2 двухосного измерительного стенда в положение, при котором продольная ось O1X1 корпуса гироскопа 1 параллельно оси ОХ вращения платформы 2.
2. Ориентируют стенд в положение, при котором:
- ось ОY вращения наружного карданового кольца 3 платформы находится в плоскости меридиана и перпендикулярна оси вращения Земли,
- ось OZ вращения внутреннего карданового кольца (на чертеже кольцо показано выполненным заодно целое с платформой 2) - в плоскости горизонта;
- ось ОХ вращения платформы 2 путем ее разворота вокруг оси OZ вращения внутреннего кольца устанавливают параллельно оси вращения Земли.
3. Приводят гироскоп 1 в рабочее состояние, для чего:
- взвешивают ротор в электростатическом поле подвеса, разгоняют ротор до рабочей скорости,
- демпфируют нутационные колебания ротора,
- приводят ось вращения ротора к продольной оси корпуса гироскопа 1.
4. Включают гироскоп 1 в качестве чувствительного элемента двухосного гиростабилизатора. Для этого первый выход двухкоординатного датчика 4 угла прибора 1 через усилитель-преобразователь 5 подключают к электродвигателю 6, установленному на оси OY наружного кольца. Второй выход датчика 4 через второй усилитель-преобразователь 7 подключают к электродвигателю 8, установленному на оси OZ внутреннего кольца.
5. В течение 3-5 ч с момента замыкания следящих систем гиростабилизатора осуществляют измерение выходных сигналов датчиков 9, 10 угла гиростабилизатора, характеризующих углы γi разворота платформы 2 вокруг оси OY наружного кольца 3 и углы βi - вокруг оси OZ внутреннего кольца.
6. По результатам измерений рассчитывают угол βo отклонения оси вращения ротора от оси вращения Земли (его появление обусловлено наличием осевого дисбаланса ротора). Для этого строят годограф движения оси вращения ротора в угловых координатах (β и γ). Определяют координаты центра βoγo годографа. Координату βo рассчитывают из соотношения:
где βl, γl - результаты измерений углов на переходных процессах,
K1 = (γl+1-γl)/(βl+1-βl),
K2 = (γl+2-γl+1)/(βl+2-βl+1).
Координату γo при реальных испытаниях гироскопа принимают равной нулю, так как известно, что моменты, действующие на ротор относительно оси O1Y1 на 3-4 порядка меньше моментов, действующих относительно оси O1Z1 (моментов осевой разбалансировки).
7. Выключают следящие системы гиростабилизатора.
8. Устанавливают продольную ось прибора в положение, определяемое углами βoγo
9. Приводят ось вращения ротора к продольной оси ОХ корпуса гироскопа 1.
10. После затухания переходного процесса, обусловленного выделением тепловой энергии при повторном приведении оси ротора (через 3-6 ч) в течение 120 ч осуществляют измерение выходных сигналов датчиков 9, 10 угла гиростабилизатора.
11. По результатам измерений строят годограф движения оси вращения ротора в угловых координатах β и γ.
12. По параметрам годографа определяют значение нестабильности скорости ухода δω гироскопа из соотношения
δω = ΔRωз,
где Δ - разность максимального и минимального радиусов годографа;
ωз - скорость вращения Земли.
13. Определяют погрешность гироскопа, сравнивая значение δω, рассчитанное по п.12, с эталонным значением (в идеальном случае с δω=0). Рассчитанное значение нестабильности скорости ухода гироскопа не должно превышать допускаемого значения.
В результате выполнения указанных операций достоверность определения погрешности гироскопа 1 увеличивается. Это обусловлено исключением из результатов измерений погрешности из-за нелинейности характеристики датчика 4 угла. При установке оси ротора в положение, определяемое углами βoγo, относительно оси ротора, совпадающей с осью вращения внутреннего карданового кольца, действует суммарный момент, близкий к нулю (в этом положении момент от разбалансировки ротора уравновешивается гироскопическим моментом, появляющимся при отклонении оси ротора от оси вращения Земли на угол βo). Отклонение оси вращения ротора от установленного направления вследствие отсутствия моментов не произойдет (будет мало).
Для исключения варианта, когда гироскоп выставляется в такое положение, что датчики работают в зоне нечувствительности, измерения сигналов производят при переходном процессе, обусловленном выделением тепловой энергии раскрутки ротора, демпфирования его нутационных колебаний и приведения оси. Наличие переходного процесса приводит к тому, что значение угла определяется с учетом этого процесса, при этом отклонение составляет несколько угловых минут, что исключает возможность установки платформы в положение, при котором датчики работают в зоне нечувствительности.
Таким образом, в результате выполнения предлагаемых технологических операций повторные измерения параметров производят при малых отклонениях от первоначального положения и вне зоны нечувствительности датчиков угла стенда, что позволяет уменьшить погрешность определения параметров гироскопа. Достоверность результатов измерений повышается без увеличения точности измерительного стенда. Поставленная задача решена.
На предприятии ЦНИИ "Электроприбор" предлагаемое техническое решение реализовано. При испытаниях получены положительные результаты. В настоящее время разрабатывается техническая документация для его применения при производстве электростатических гироскопов со сферическим ротором.
Технико-экономическая эффективность изобретения заключается в повышении достоверности результатов измерений параметров гироскопа без увеличения точности измерительного стенда.
В связи с отсутствием сведений о потребностях страны в таких гироскопа, экономический эффект изобретения подсчитать не представляется возможным.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИВЕДЕНИЯ В РАБОЧЕЕ СОСТОЯНИЕ ЭЛЕКТРОСТАТИЧЕСКОГО ШАРОВОГО ГИРОСКОПА | 2001 |
|
RU2206874C1 |
| СПОСОБ КАЛИБРОВКИ ДАТЧИКА УГЛА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 1994 |
|
RU2114396C1 |
| СПОСОБ ОРИЕНТАЦИИ ПОЛЯРНОГО ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА КОРАБЕЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2006 |
|
RU2308004C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 2002 |
|
RU2208764C1 |
| СПОСОБ АВТОКОМПЕНСАЦИИ УХОДОВ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2005 |
|
RU2296298C1 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ УГЛОВОГО ДВИЖЕНИЯ | 2001 |
|
RU2206899C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НОМИНАЛЬНОЙ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2004 |
|
RU2269745C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| ГИРОГОРИЗОНТКОМПАС ДЛЯ ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2062985C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КУРСА ОБЪЕКТА И САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОУКАЗАНИЯ | 2000 |
|
RU2186338C1 |
Способ может быть использован при производстве и эксплуатации электростатических гироскопов со сферическим ротором и датчиком угла, расположенным на полюсе ротора. Технический результат - повышение достоверности результатов измерений при неизменной точности измерительного стенда. В способе, основанном на измерении выходных сигналов датчиков угла поворота платформы, выходные сигналы измеряют во время переходных процессов, разворачивают платформу вокруг оси внутреннего карданова кольца на угол, определяемый по математическому выражению, представленному в описании. Затем совмещают ось вращения ротора гироскопа с продольной осью корпуса. 1 ил.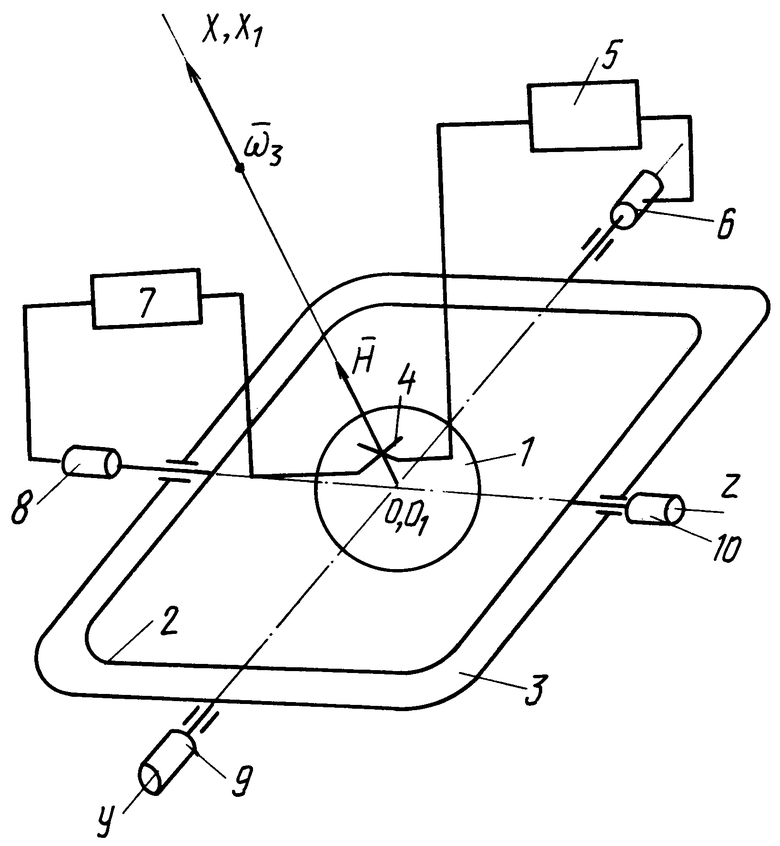
Способ определения погрешности электростатического гироскопа, включающий установку электростатического гироскопа на платформе двухосного стенда в положение, при котором продольная ось корпуса гироскопа параллельна оси вращения платформы, выставку оси вращения внутреннего карданового кольца платформы в плоскости горизонта, приведение оси вращения ротора гироскопа к продольной оси корпуса, включение электростатического гироскопа в качестве чувствительного элемента двухосного гиростабилизатора, определение погрешности электростатического гироскопа по выходным сигналам датчиков угла, характеризующим углы поворота платформы вокруг осей наружного и внутреннего кардановых колец подвеса, измеренным после затухания переходных процессов электростатического гироскопа, отличающийся тем, что после включения электростатического гироскопа измеряют выходные сигналы датчиков угла платформы во время переходных процессов электростатического гироскопа, разворачивают платформу вокруг оси внутреннего карданова кольца на угол βo, определяемый по выражению
где βl,γl - углы поворота платформы, измеренные во время переходных процессов электростатического гироскопа,
K1 = (γl+1-γl)/(βl+1-βl),
K2 = (γl+2-γl+1)/(βl+2-βl+1),
и совмещают ось вращения ротора электростатического гироскопа с продольной осью корпуса.
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| СПОСОБ КАЛИБРОВКИ ДАТЧИКА УГЛА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 1994 |
|
RU2114396C1 |
| СПОСОБ ПОЛУЧЕНИЯ РЕДКИХ ТУГОПЛАВКИХ МЕТАЛЛОВ, КРЕМНИЯ И ИХ СОЕДИНЕНИЙ | 1999 |
|
RU2153016C1 |

